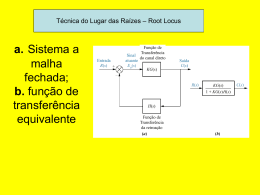
Técnica do Lugar das Raízes – Root Locus a. Sistema a malha fechada; b. função de transferência equivalente Entrada Função de Transferência Sinal do canal direto atuante Função de Transferência da retroação Saída Pólos e Zeros da F.T.M.F. em função dos pólos e zeros da F.T.M.A N G s N H s G s ; H s DG s DH s N G s K DG s KN G s DH s T s N G s N H s DG s DH s KN G s N H s 1 K DG s DH s Os Zeros de T(s) são os zeros de G(s) e os pólos de H(s), mas os pólos de T(s) não podem ser determinados diretamente, eles precisam ser calculados e mais do que isto, dependem do valor de K Exemplo • Calcule os pólos e zeros para a F.T.M.F. quando G(s) e H(s) são dadas por: s 1 Gs ss 2 ; s 3 H s s 4 Os Zeros valem: -1 e -4 Os pólos serão dados pelas raízes do polinômio abaixo que dependem de K. s 3 6 K s 2 8 K s 3K Representação vetorial de números complexos: a. s = + j; b. (s + a); c. representação alternativa de (s + a); d. (s + 7)|s5 + j2 Plano s Plano s Plano s Plano s m F s s z i i 1 n s p produtodos fatores com plexosdo num erador produtodos fatores com plexosdo denomin ador j j 1 m = número de zeros ; n = número de pólos Como F(s) é um número complexo ele pode ser representado através da forma polar ou seja, por um MÓDULO e uma FASE : M m M com prim ento dos vetores correspondentes aos zeros s z i i 1 n com prim ento dos vetores correspondentes aos pólos s p i j 1 angulosdos zeros s zi m i 1 n - j 1 angulodos pólos s p j Exemplo G s s 1 s2 s 1 G s s2 considereo mapeamentopara s 1 j , ou seja : s 1 j 1 j 1 j j 1 j 1 j 1 1 j 1 j 2 1 j 1 j 1 j 2 2 2 2 2 2 1 1 cujo módulo vale: 2 2 2 e a fase vale: tg 1 1 2 45o 1 4 2 j j L2 x 2 2 L1 o 1 1 L1 1 L2 12 12 2 L1 1 2 Módulo igual a L2 2 2 1 90o 1 1 Fase igual a 1 2 90o 45o 45o 2 tg 1 45o Representação vetorial da equação: s 1 F s ss 2 s 3 j 4 zero em 1 módulo 20 e fase 116,60 pólo em zero módulo 5 e fase 126,90 pólo em 2 módulo 17 e fase 104,00 Módulo 0,217 ; Fase 114,30 Cortesia de ParkerVision. a. Sistema que rastreia automaticamente objetos; b. diagrama de blocos; c. função de transferência a malha fechada Tabela 8.1 Localização dos pólos como função do ganho do sistema mostrado anteriormente s 2 10s K a. Diagrama de pólos com base na tabela 8.1; b. lugar das raízes FUNDAMENTO GERAL DO LUGAR DAS RAÍZES – PÓLOS DE MALHA FECHADA KG s T s 1 KG s H s Raízes do denominador, qualquer valor de " s" tal que 1 KG s H s 0 ou KG s H s 1 KG s H s 1 e fase de KG s H s 2n 1180 n 0, 1, 2,.... o Veja exemplo para o sistema de câmara apresentado anteriormente para por exemplo o pólo em -1 que acontecerá para um ganho k=9 a. Sistema de Exemplo; b. diagrama de pólos e zeros de G(s) Verifique se os pontos “s” abaixo são pólos do sistema de malha fechada s 2 j3 2 e s 2 j 2 Plano s Representação vetorial de G(s) com base na Fig. 8.6(a) em –2+ j 3 Plano s 1 56,31o 2 71,57o 3 90o 4 108,43o 1 2 3 4 70,55o NÃO PERTENCE AO LUGAR DAS RAÍZES 2 s 2 j 2 j 19,471o 2 35,264o 3 90o 4 144,736 o 1 2 3 4 180,00o L1 2,12 ; L2 1,22 ; L3 LL 2 ; L4 1,22 ; K 3 4 0,33 2 L1L2 PERTENCE AO LUGAR DAS RAÍZES 2 2
Baixar