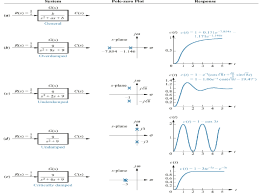
UNIVERSIDADE GAMA FILHO PROCET – DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva Projeto de Sistemas de Controle pelo Método do Lugar das Raízes “Projetar usando o método do Lugar das raízes, significa redesenhar o lugar das raízes do sistema pela adição de pólos e de zeros na função de transferência de malha aberta do sistema, forçando o novo lugar das raízes a passar pelos pólos de malha fechada desejados no plano complexo”. Ogata Compensação de Sistemas Compensação é a modificação da dinâmica de um sistema para satisfazer determinadas especificações de desempenho. O dispositivo que será inserido no sistema com a finalidade de satisfazer essas especificações, é chamado de compensador. O compensador compensa a deficiência do sistema original. Os compensadores e controladores mais utilizados são os de Avanço e Atraso de fase e os Controladores PID. Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Efeitos da adição de Pólos e Zeros no lugar das raízes Efeito da adição de pólos: a adição de pólos, tem o efeito de deslocar o lugar das raízes para a direita, tendendo a diminuir a estabilidade do sistema e fazendo com que a acomodação da resposta seja mais lenta. Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Efeitos da adição de Pólos e Zeros no lugar das raízes Efeito da adição de zeros: a adição de um zero tem o efeito de deslocar o lugar das raízes para a esquerda, tendendo a tornar o sistema mais estável e mais rápida com a acomodação da resposta. Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Amplificadores Operacionais Também chamados abreviadamente de Amp-ops. São utilizados para amplificar sinais em sensores de circuitos Também são utilizados em filtros com a finalidade de compensação de sistemas. onde as entradas e1 e e 2 podem ser sinais cc ou ca e K é o ganho diferencial (ganho de tensão). O valor de K é cerca de 105 a 106 para freqüências de até 10 Hz e torna-se aproximadamente unitário para freqüências entre 1 MHz e 50 MHz. Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Amplificadores inversores O Ampop amplifica a diferença entre e1 e e 2 . Como o ganho geralmente é muito alto é necessário haver uma realimentação negativa da saída para a entrada, afim de tornar o amplificador estável. A equação para esse circuito será: Como e nesse caso será uma valor muito pequeno, quase zero, portanto: e Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Amplificadores não-inversores Neste caso temos: Como , neste caso temos: Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Resumindo Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Uso da impedância para obtenção de funções de transferência Podemos considerar as impedâncias resistivas, capacitivas e indutivas nos cálculos para facilitar a obtenção de funções de transferência. E i s E s ' E s E o s ' Z1 Z2 Como E ' s 0 , temos: E o s E i s Z2 Z1 Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Redes de Avanço ou Atraso com Amplificadores Operacioanais A figura mostra um circuito eletrônico com Amplificador Operacional. Sabemos que: E s Z Fazendo... 2 E i s e que, E o s E s Z1 Essa rede será uma Rede de Avanço de fase se ou portanto, Ficamos Essa rede será uma Rede de Atraso de fase se com: Com a adição do circuito inversor teremos: Rede de Avanço de Fase Rede de Avanço ou Atraso Rede de Atraso de Fase Inversor de sinal R4 R3 Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Compensadores de Avanço de fase Uma das formas de se construir um Compensador de avanço de fase é usar amplificadores operacionais para a construção de redes de avanço de fase =2 rad/s conforme exposto. n 60o Considere o sistema mostrado A função de transferência de malha fechada é Vê-se que a função de transferência de malha aberta é: Os pólos de Malha fechada estão situados em: Deseja-se modificar os pólos de malha fechada de modo que n haja alteração no valor do coeficiente de amortecimento. = 4 rad/s, sem que Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Portanto, temos que redimensionar o lugar das raízes do sistema da figura anterior para que n seja 4 rad/s, e que seja igual a 0,5. 1º Passo: Determinar a localização do pólo de malha fechada desejado. Com base nas especificações acima, o pólo é: Percebe-se que para esse pólo, um simples ajuste do ganho não resolverá o problema. Por essa razão, vamos inserir um compensador de avanço De fase no ramo direto. x 2º Passo: Determinar a soma dos ângulos junto a um dos pólos de malha fechada na posição desejada, com os pólos e zeros de malha aberta do sistema original e em seguida encontrar o ângulo necessário a ser acrescentado Para que a soma total dê 180 o 2 k 1 . x Projeto de Sistemas de Controle pelo jω Método do Lugar das Raízes 1 arctag 3, 46 60 2 180 Pela condição de ângulo temos: 0 90 120 o o 2 k o 180 210 o 30 180 o o 60 o 120 o 2 k 1 x 2 k 90o -2 - 1 1 o j3 j2 o 60o 180 210 x Mas queremos o ângulo no sentido anti horário, então: o x 120o σ - j1 +2 - j2 1 x - j3 Vemos que pela condição de ângulo, para que o gráfico do lugar das raízes passe o ponto desejado a função de transferência do compensador tem que ser tal que acrescente 30º no lugar das raízes original. Agora devemos determinar localização dos pólos e zeros do compensador de avanço de fase. Há muitas possibilidades de fazer isso. Uma possibilidade bem simples seria fazer a função de transferência do Compensador igual a Isso nos daria os 30º necessários para deslocar o lugar das raízes de tal forma que atenda aos requisitos de desempenho desejados. s2 s4 Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Método geral para encontrar a função de transferência do compensador 1 Passo: Trace uma reta x horizontal passando pelo ponto do pólo desejado. 2 Passo: Trace outra reta conectando o pólo desejado a origem. 3 Passo: Agora trace uma bissetriz entre essas duas retas. 4 Passo: Desenhe por fim duas retas que façam os ângulos de / 2 com a bissetriz. As intersecções dessas retas com o eixo real negativo fornecem os pontos jω x Como o sistema é de avanço de fase, então: Z= - 2,9 e P= - 5,4 x 15o O sistema compensado ficará assim: x - 5,4 j3 j2 15o x - 2,9-2 - 1 x 120o σ - j1 - j2 x - j3 +2 Análise de Resposta em Frequencia Análise de Resposta em Frequencia Resposta em Frequencia O termo Resposta em Freqüência representa a resposta de um sistema no regime estacionário quando aplicamos uma entrada senoidal. As informações obtidas aqui serão diferentes das informações obtidas com a analise do lugar das raízes. Os métodos de resposta em freqüência foram desenvolvidos por NYQUIST, BODE, NICHOLS e muitos outros. Pela Análise da Resposta em Freqüência, a resposta em regime estacionário de uma determinada função de transferência de um sistema, pode ser obtida diretamente a partir da sua função de transferência senoidal. G s G j Análise de Resposta em Frequencia Y s G s X s Y s G s X s 2 2 G s X s j s j Aplicando Frações parciais Y s a s j b s j Então: a G s b G s X s 2 2 s 2 s j s j X G j 2j s j X 2 s j X G j 2j X G j Y s 2j s j X G j 2j s j Fazendo: G j G j e j G j G j e j Análise de Resposta em Frequencia X G j e Y s y t X G j e j 2j X G j e s j j e j t X G j e 2j y t X G j Aplicando transformada inversa teremos: 2j s j 2j e j t j e j t 2j y t X G j sen t j e j t
Baixar