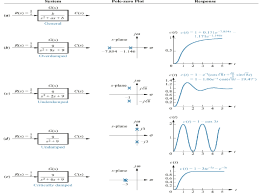
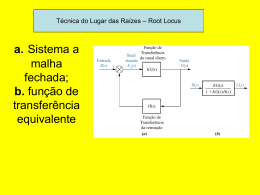
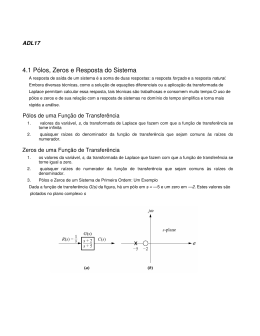
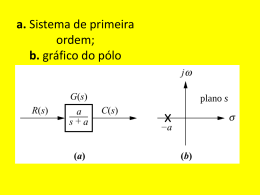
Disciplina: Sistemas de Controle 1 - ET76H Prof. Dr. Ismael Chiamenti 2014/2 Aula 5 • CONTATOS PARA DÚVIDAS - Email: [email protected] -Local: DAELT/UTFPR • PLANO DE ENSINO, PLANO DE AULAS E INFORMAÇÕES: https://paginapessoal.utfpr.edu.br/chiamenti 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. Conceitos básicos de sistemas de controle; Sistemas em malha aberta e malha fechada; (Revisão TL) e Simplificação de diagrama de blocos; Funções de transferência ; Modelo na forma de variáveis de estado; Caracterização da resposta de sistemas de primeira ordem, segunda ordem e ordem superior; Erro de estado estacionário; Estabilidade; Introdução a controladores PID; Sintonia de controladores PID; Método do lugar das raízes; Projeto PID via método do lugar das raízes; Resposta em frequência; Margens de ganho e fase e estabilidade relativa; Projeto de controlador por avanço e atraso de fase; Controlabilidade e Observabilidade. Considerando uma entrada conhecida (ok!), e o modelo matemático inserido em cada bloco, pergunta-se: quais os aspectos significativos das respostas dos sistemas de primeira e segunda ordem e de ordem superior ? Estudamos duas formas de modelar matematicamente sistemas: a) Funções de transferência (modelo no domínio da frequência s). b) Espaço de estados, formado pela(s) equação(ões) de estado e pela(s) equação(ões) de saída (modelo no domínio do tempo t). O próximo passo, após os modelos serem obtidos, é analisar os sistemas modelados para verificar o comportamento das suas respostas perante uma (ou mais) entrada(s) conhecida(s) de teste. Na aula de hoje analisaremos, prioritariamente, a resposta transitória dos sistemas, em aulas posteriores a resposta estacionária. A obtenção dos parâmetros das respostas dos sistemas pode ser realizada aplicando-se diferentes entradas no sistema em análise, tipicamente um pequeno rol de sinais bastam: degrau, impulso, rampa, parábola e cossenoidal. A ordem dos sistemas: é determinada pela ordem da equação diferencial que descreve o sistema ou, de forma equivalente, a ordem do denominador da função de transferência após os termos comuns com o numerador serem cancelados, ou ainda, ao número de equações de primeira ordem necessárias para modelar o sistema através de espaço de estados. A resposta dos sistemas: pode ser dividida em duas parcelas: a resposta forçada e a resposta natural. • A resposta forçada também é chamada de resposta de estado estacionário ou solução particular. • A resposta natural é também chamada de resposta homogenia. Técnicas de análise das respostas: podem ser utilizadas: solução da equação diferencial, transformada de Laplace ou pólos e zeros. A que fornecer resultados satisfatórios, no menor tempo, será a melhor. PÓLOS (1) valores da variável da transformada de Laplace, s, que fazem com que a função de transferência assuma valor infinito ou (2) qualquer raiz do denominador que seja comum as raízes do numerador. Exemplo: G(s) ( s 1)(s 3) ( s 1,5)(s 3)(s 4) p1 1,5; p2 3; p3 4 ZEROS (1) valores da variável da transformada de Laplace, s, que fazem com que a função de transferência assuma valor zero ou (2) qualquer raiz do numerador que seja comum as raízes do denominador. Exemplo: G(s) ( s 1)(s 3) ( s 1,5)(s 3)(s 4) z1 1; z2 3 Exemplo: Considere um sistema modelado por G(s): Pólo na entrada → degrau na saída: resposta forçada; Pólo na FT → resposta natural; Zeros e pólos geram amplitudes das respostas nat. e for. Forma geral da função de transferência de sistemas de primeira ordem: C ( s) 1 1/ a G( s) R( s) s 1 s 1 / s a No domínio do tempo: dc (t ) c(t ) r (t ) dt c(t ) ch (t ) c p (t ) Aet / c p (t ) constante de tempo: τ Exemplos de sistemas de primeira ordem: Ordem do polinômio do denominador: 1 Representação por diagrama de blocos da forma geral da função de transferência de primeira ordem: C ( s) 1 1/ a G( s) R( s) s 1 s 1 / s a Resposta ao degrau unitário: G (s) 1 1 C ( s ) G ( s ) R( s ) s 1 s C (s) R( s) Expandindo em frações parciais: a1 a2 C (s) s s 1 C (s) a1 sG(s) s0 1 a2 s 1G(s) s1/ 1 1 1 s s 1 s s 1 / c(t ) 1 e t / , para t 0 Análise da resposta: c(t ) 1 et / G ( s) 1 1/ a s 1 s 1 / s a Para t = 0, temos c(0) = 0 Para t → ∞, temos c(∞ ) = 1 Para t = τ, temos c(τ) = 0,632, 1 uma vez que e 1/ 2,7182818 Tr: tempo de subida (resposta), de 10% até 90% do valor final. 2,31 0,11 2,2 2,2 a a a Quanto menor τ, mais rápida a resposta Tr. Tr dc(t ) 1 e t / dt t 0 t 0 1 Ts: tempo de assentamento (estabilização), 2% do valor final (mas pode ser outra %) Ts 4 4 a Determinação experimental da função de transferência de primeira ordem, método útil quando informações detalhadas do sistema não são acessíveis: Considerando a função de transferência na forma G ( s ) K , e aplicando sa uma entrada em degrau unitário: 1 K K /a K /a C (s) s sa s sa Determinando K e a da resposta experimental, determina-se a função de transferência do sistema. Exemplo: Em um sistema foi aplicada uma entrada do tipo degrau unitário. O gráfico abaixo foi obtido como resposta a tal entrada. Determine o modelo matemático do sistema usando função de transferência. 1 0,25 a 4 a K 18 K 18 * 4 72 a G (s) 72 s4 Resposta do sistema para entrada do tipo rampa: 1 R( s) 2 s 1 1 C ( s ) G ( s ) R( s ) 2 s 1 s 1 2 C ( s) 2 s s s 1 c(t ) t et / , para t 0 e(t ) r (t ) c(t ) e(t ) (1 et / ) e(t ) t Quanto menor o τ, menor será o erro de estado estacionário. (1o ordem e r(t): rampa) Resposta do sistema para entrada do tipo impulso: R( s ) 1 1 1 C ( s) G ( s) R( s) s 1 c(t ) 1 e t / , para t0 Para sistemas LIT (lineares e invariantes no tempo): t crampa (t ) cdeg rau (t )dt cimpulso (t ) dt d (1 e t / ) cimpulso (t ) dt 1 t / cimpulso (t ) e , para 0 t crampa (t ) (1 e t / )dt 0 crampa (t ) t e t 0 t / t 0 crampa (t ) t e t / , para dcdeg rau (t ) t0 t0 Forma geral da função de transferência de sistemas de segunda ordem: C ( s) 2 R(s) s 2 n s n2 2 n d 2c(t ) dc(t ) 2 2 2 c ( t ) n n n r (t ) 2 dt dt n2 C ( s) K. 2 R( s ) s 2 n s n2 n : Frequência natural de oscilação; : Coeficiente de amortecimento; Pólos : p1, 2 n jn 1 2 Exemplo: Determine a frequência de oscilação natural e o coeficiente de amortecimento do sistema descrito pela seguinte função de transferência: 36 G(s) 2 s 4,2s 36 n2 C ( s) 2 R(s) s 2 n s n2 n2 C ( s) K. 2 R( s ) s 2 n s n2 n2 36 n 6 4,2 2 n 4,2 0,35 12 K 1 Exemplo: Determine a frequência de oscilação natural e o coeficiente de amortecimento do sistema descrito pela seguinte função de transferência: 9 G(s) 2 s 4,2s 36 n2 C ( s) 2 R(s) s 2 n s n2 n2 C ( s) K. 2 R( s ) s 2 n s n2 n2 36 n 6 4,2 2 n 4,2 0,35 12 K 9 2 n 9 K 0,25 36 A resposta dos sistemas de segunda ordem 2 podem ser classificadas em quatro categorias, Pólos : p1, 2 n jn 1 de acordo com os valores dos seus pólos: A resposta dos sistemas de segunda ordem 2 podem ser classificadas em quatro categorias, Pólos : p1, 2 n jn 1 de acordo com os valores dos seus pólos: Desempenho do sistema: considerando uma entrada em degrau e 0 1: 1 n2 C ( s) 2 2 s 2 n s n s 1 nt 2 c(t ) 1 e cos(n 1 t )u (t ) 2 1 tan 2 1 1 Resposta ao degrau unitário: Resposta ao impulso: 1 n2 n C ( s) 2 1 c(t ) e 2 s 2 n s n 2 2 1 2 1 n t n 2 1 2 e 2 1 n t u (t ) 0 1 n t 2 n c(t ) e sin n 1 t u (t ) 2 1 1 c(t ) n2te nt u (t ) Parâmetros de desempenho: Mp: valor máximo da resposta; Fv: valor final ou valor de regime permanente. Parâmetros de desempenho (resposta ao degrau unitário): 1. Tempo de pico (Tp): tempo para a resposta atingir seu valor máximo. Tp n 1 2 sendo a magnitude no instante t = Tp calculada por (para entrada em degrau): cmáx . (t ) 1 e 1 2 2. Tempo de subida (Tr): tempo para a resposta ir de 10% para 90% do seu valor final. 3. Percentual de Overshoot (PO): valor máximo da resposta, expresso em porcentagem do valor final da resposta. Mp Fv PO% 100 % Fv PO% 100e 1 2 % ln(PO% / 100) 2 ln 2 ( PO% / 100) 4. Tempo de assentamento (Ts): Tempo para que o valor da resposta não oscile mais que 2% do seu valor final (usaremos sempre 2%). Ts 4 n , para 2% Ts 3 n , para 5% Percentual de overshoot versus coeficiente de amortecimento: cos( ) Parâmetros no plano s : Tp 2 d n 1 Ts 4 n 4 d , para 2% ln(PO% / 100) 2 ln 2 ( PO% / 100) Exemplo: Desenhar a região no plano complexo para PO < 16 % e Ts < 2,5 s. PO% 16 15 10 zeta 0,503 0,516 0,591 θ 59,7º 58,9º 53,7º Ts 2,5 2,0 1,0 σd 1,6 2,0 4,0 ATIVIDADE (F) Efeitos na resposta dos sistemas de segunda ordem devido a alteração do local dos pólos: Efeitos na resposta dos sistemas de segunda ordem devido a alteração do local dos pólos: Efeitos na resposta dos sistemas de segunda ordem devido a alteração do local dos pólos: p1,2 2 j 4,532 p1, 2 2 j 4,532, p3 10 p1, 2 2 j 4,532, p3 3 Caso o pólo adicional (acima da segunda ordem) esteja distante (no eixo real do plano s) dos pólos de segunda ordem 5 vezes ou mais, o sistema pode ser aproximado como um de 2º ordem. OBSERVAÇÕES: •O princípio de pólos dominantes deve ser utilizado quando não há zeros próximos aos pólos dominantes; • Com zeros próximos, a resposta é alterada significativamente; • Com os pólos de alta ordem DISTANTES dos dominantes, as fórmulas para tempo de pico, percentual de overshoot, tempo de assentamento e tempo de subida continuam válidas. ATIVIDADE (G)
Baixar