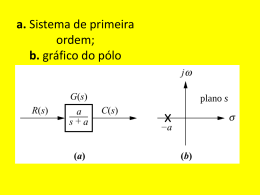
Generalizando um sistema de Segunda Ordem Gs 2 2 s 2n s n 2 n • Frequência Natural do Sistema n • Relação de Amortecimento do Sistema Respostas de segunda ordem em função da relação de amortecimento Parâmetros de Desempenho de Sistemas de Segunda Ordem • Tempo de Subida: tempo para a resposta variar de 10% até 90% do seu valor final; • Tempo de Estabilização: tempo necessário para que a resposta ao degrau alcance 98% do valor de estado estacionário; Parâmetros de Desempenho de Sistemas de Segunda Ordem • Tempo de Pico: tempo necessário para que a resposta alcance seu valor máximo; • Ultrapassagem Percentual (Sobrenível Percentual): O quanto o valor da resposta (em Percentual) ultrapassa no tempo de pico o valor de estado estacionário da resposta. Especificações da resposta de segunda ordem subamortecida máx 1,02 0,98 0,9 cfinal 0,1 0,1 cfinal %UP e Tp 2 1 X 100 % ln%UP / 100 ln %UP / 100 2 2 n 1 2 Ts 4 n Ultrapassagem percentual,%UP Ultrapassagem percentual em função da relação de amortecimento 0,1 0,2 0,3 0,4 0,5 0,6 0,7 Relação de amortecimento, 0,8 0,9 Respostas de segunda ordem subamortecidas com os valores da relação de amortecimento 1,8 1,6 1,4 1,2 1,0 0,8 0,6 0,4 0,2 0,1 0,2 0,4 0,5 0,6 0,8 Exemplo • Encontre Tp , %UP e Ts para uma entrada degrau para o sistema abaixo 100 G s 2 s 15s 100 RELAÇÃO ENTRE OS PARÂMETROS DE RESPOSTA AO DEGRAU E A POSIÇÃO DOS PÓLOS DE G(S) NO PLANO “s” d FREQUÊNCIANATURAL AMORTECIDA plano s d FREQUÊNCIAEXPONENCIAL AMORTECIDA cos n n 2 n 1 2 2 d FREQUÊNCIADE OSCILAÇÃOAMORTECIDA d FREQUÊNCIAEXPONENCIAL AMORTECIDA Tp n 1 2 d Ts 4 n 4 d Linhas de valores constantes para tempo de pico, Tp, tempo de assentamento, Ts, e ultrapassagem percentual, %UP - Nota: %UP1 < %UP2 cos n n 2 n 1 2 2 %UP1 %UP2 Tp n 1 2 d Ts 4 n 4 d plano s Respostas ao degrau de sistemas de segunda ordem subamortecidos à medida que os pólos se movem: a. com parte real constante; b. com parte imaginária constante; c. com relação de amortecimento constante. A mesma envoltória plano s Movimentação do pólo A mesma freqüência plano s Movimentação do pólo A mesma ultrapassagem plano s Movimentação do pólo Exemplo: Encontre , n , Tp ,%UP, Ts plano s %UP e Tp 2 1 x100 % ln%UP / 100 ln %UP / 100 2 2 n 1 2 Ts 4 n Resposta de Sistemas com três pólos A Bs n Cd D C s 2 2 s s n d s r ct A ent B cosd t Csend t Dert Influência de Terceiro Pólo em um sistema de Segunda Ordem • Quanto menor a Constante de Tempo do pólo menor sua influência na resposta • Quanto mais a esquerda do plano “s” estiver o pólo menor será o resíduo associado a este pólo (ver exemplo a seguir) Influência do Resíduo do Terceiro Pólo 2 2 t C s c t .... 0 , 5 e s s 2 2 s 2 ( s 2) 2 5 t C s c t .... 0 , 024 e s s 2 2 s 2 ( s 5) 2 10 t C s c t .... 0 , 0024 e s s 2 2 s 2 ( s 10) e 2 0,135 , e 5 0,0067 , e 10 0,000045 Validade de aproximação de Segunda Ordem • Como os pólos adicionais devem estar o mais à esquerda do eixo imaginário, consideraremos que um sistema com três (ou mais) pólos pode ser aproximado por um Sistema de Segunda Ordem se os pólos adicionais estiverem a esquerda dos pólos dominantes, pelo menos cinco vezes mais distantes. EXEMPLO • • • 24,542 C1 s 2 s s 4 s 24,542 245,42 C2 s 2 s s 4 s 24,542s 10 73,626 C3 s s s 2 4 s 24,542s 3 -2.0000 + 4.5323i -2.0000 - 4.5323i 1,4 1,2 Resposta normalizada Respostas ao degrau dos sistemas T1(s), T2(s) e T3(s) 1,0 0,8 0,6 0,4 0,2 0,5 1,0 1,5 Tempo (s) 2,0 2,5 3,0 Resposta de sistema com Zeros • Influenciam no valor das constantes na expansão em frações parciais; • Se comporta como um fator de ganho; • Quanto mais a esquerda do eixo imaginário menor sua influência na forma da resposta; Cs s a sC s aCs Pólos em : 1 j 2,828 1,6 1,4 c (t) normalizada Efeito de adicionar um zero a um sistema com dois pólos 1,2 1,0 0,8 0,6 0,4 zero em zero em zero em sem zeros 0,2 2,0 4,0 Tempo (s) 6,0 Resposta ao degrau de um sistema de fase não-mínima (Zero do lado direito do plano “s”) 1,5 1,0 0,5 1,0 –0,5 2,0 3,0 Tempo (s) 4,0 5,0 6,0 Cancelamento de Pólos e Zeros 26,25s 4 C1 s s s 5s 6s 3,5 26,25s 4 C2 s s s 5s 6s 4,01 1 3,5 3,5 1 C1 s s s 5 s 6 s 3,5 0,87 5,3 4,4 0,033 C2 s s s 5 s 6 s 4,01 Exercícios • Capítulo 4: – Exercícios de avaliação números: 4.1, 4.3, 4.4, 4.5, 4.6 – Exemplos: 4.1, 4.2, 4.3, 4.4 e 4.8 – Problemas: 2, 4, 8, 18, 19, 20, 23, 24, 28, 29 e 30
Baixar