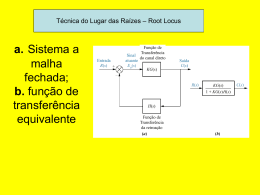
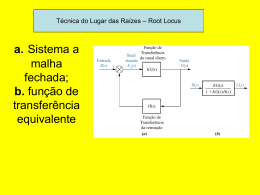
Disciplina: Sistemas de Controle 1 - ET76H Prof. Dr. Ismael Chiamenti 2014/2 Aula 9 • CONTATOS PARA DÚVIDAS - Email: [email protected] -Local: DAELT/UTFPR • PLANO DE ENSINO, PLANO DE AULAS E INFORMAÇÕES: https://paginapessoal.utfpr.edu.br/chiamenti 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. Conceitos básicos de sistemas de controle; Sistemas em malha aberta e malha fechada; (Revisão TL) e Simplificação de diagrama de blocos; Funções de transferência ; Modelo na forma de variáveis de estado; Caracterização da resposta de sistemas de primeira ordem, segunda ordem e ordem superior; Erro de estado estacionário; Estabilidade; Introdução a controladores PID; Sintonia de controladores PID; Método do lugar das raízes (root locus); Projeto PID via método do lugar das raízes; Resposta em frequência; Margens de ganho e fase e estabilidade relativa; Projeto de controlador por avanço e atraso de fase; Controlabilidade e Observabilidade. T(s): Função de Transferência do Sistema (função de transferência global): T ( s) G1 ( s)G2 ( s) 1 G1 ( s)G2 ( s) H1 ( s) Quais serão as variações na localização dos pólos quando um ou mais parâmetros do controlador são variados ? • O Método do Lugar das Raízes foi desenvolvido por W. R. Evans (1953); • Permite que o “lugar das raízes”, no plano s, de uma equação seja analisado em função da variação contínua de um parâmetro; • A obtenção do lugar das raízes permite que seja escolhido um valor específico do parâmetro variado para obtenção dos requisitos desejados; • O método pode ser empregado tanto em sistemas contínuos quanto em sistemas digitais. Considerando o seguinte sistema realimentado: Sendo a função de transferência de malha aberta: KG ( s) H ( s) E a função de transferência de malha fechada: OBJETIVO: Determinar a reação devido a variação do ganho K (0 < K < ∞) sobre a localização dos pólos em malha fechada. T ( s) KG ( s) 1 KG ( s) H ( s) Em outras palavras, aplicar procedimentos para determinação do lugar geométrico formado pelas raízes de 1 +KG(s)H(s) = 0 quando K variar de 0 < K < ∞. Exemplo: Determinar o lugar das raízes (pólos de malha fechada em função de K) para o seguinte sistema: K5 s ( s 20) T ( s) K5 1 s ( s 20) T (s) K5 s 2 20 s K 5 Exemplo: continuação.... s 2 20s K 5 raízes.... K →∞ s1, 2 10 100 K 5 K →∞ Serão considerados 10 passos para a construção e verificação do lugar das raízes. REGRA 1: os ramos do lugar das raízes iniciam nos pólos de G(s)H(s), nos quais K = 0 e terminam nos zeros de G(s)H(s), para quando K → ∞, incluindo os zeros no infinito. O número de zeros no infinito é determinado por: Pólos explícitos de malha aberta: N p Zeros explícitos de malha aberta: N z N z N p N z Exemplo (comprovação quanto a origem e destino do lugar das raízes conforme declarado na regra 1) Considere que G e H são: s2 s5 G (s) 2 H ( s) s s4 1 KG(s) H (s) 0 1 K ( s 2)(s 5) 0 2 s ( s 4) Para K = 0 (origem): s 2 (s 4) K (s 2)(s 5) 0 s 2 (s 4) 0 Que são os pólos de G(s)H(s). s1 s2 0; s3 4. Exemplo: Continuação... Para K → ∞ (destino) A condição acima é analisada escrevendo a equação sob análise como: s 2 (s 4) K (s 2)(s 5) 0 s 2 ( s 4) K ( s 2)(s 5) Para a igualdade ser válida é necessário que: s 2, pela esquerda( 2) ; s 5, pela esquerda( 5); s Onde -2 e -5 são os zeros de G(s)H(s). O termo s → -∞ indica um zero no infinito, uma vez que N z N p N z N z 3 2 1 REGRA 2: as regiões sobre o eixo real, à esquerda de um número ímpar de pólos mais zeros de KG(s)H(s), pertencem ao lugar das raízes. (iniciando a contagem a partir do zero ou pólo localizado na extrema direita do plano s). Exemplo: Considerando os valores do exemplo anterior: K Zeros: s1 = -2 e s2 = -5 Pólos: p1 = p2 = 0 e p3 = -4. ( s 2)(s 5) 0 2 s ( s 4) Exemplo: Continuação... No plano s OBS.: Dois pólos na origem! REGRA 3: A medida que K se aproxima de ∞, os ramos do lugar das raízes se aproximam de assíntotas com inclinação (2i 1)180o ; i 0,1,2,... N p Nz Exemplo: Considere um sistema com: KG ( s) H ( s) K s( s 1)(s 4) Para o sistema considerado, temos que: N p 3; Nz 0 Exemplo: Continuação.... (2i 1)180o ; i 0,1,2,... N p Nz (2i 1)180o (2i 1)60o ;0,1,2,... 30 Assim, as assíntotas terão ângulos, no sentido anti-horário a partir do eixo real, de 60º, -60º e 180º. Qual a origem das assíntotas ? REGRA 4: O ponto de partida das assíntotas é o centro de gravidade (C.G.) da distribuição dos pólos e zeros, calculado por: polos zeros C.G. N p Nz Exemplo: Considerando o sistema do exemplo anterior: KG ( s) H ( s) C.G. K s( s 1)(s 4) 0 1 4 0 5 30 3 Exemplo: Continuação... C.G. REGRA 5: os locais de chegada e saída dos ramos no eixo real do plano s são determinados a partir da seguinte expressão: d G ( s) H ( s)1 0 ds Exemplo: Considerando o seguinte sistema: G( s) H ( s) 1 s( s 1)(s 4) d G ( s) H ( s)1 0 ds G(s)H (s)1 s(s 1)(s 4) s3 5s2 4s 3s 2 10s 4 0 3s 2 10s 4 0 s1 0,465; s2 2,869 -0,465 REGRA 6: as ramificações do local das raízes deixam ou entram no eixo real com ângulos de ± 90º. REGRA 7: o local das raízes é simétrico em relação ao eixo real porque as raízes são números complexos conjugados. REGRA 8: os ângulos de saída e de chegada de pólos e zeros são determinados a partir da seguinte condição geral de ângulos: p1 p 2 p3.... z1 z 2 z 3... (2i 1)180o Exemplo: Determinar o ângulo de saída do pólo 1 Exemplo: Continuação.... p1 p2 p3 z1 (2i 1)180o p1 p 2 p3 z1 180o p 2 90o p 3 tg 1 (1 / 2) 26,56o z1 tg 1 (1 / 1) 45o p1 90o 26,56o 45o 180o p1 108,44o REGRA 9: o ponto onde o lugar das raízes cruza o eixo imaginário é obtido fazendo s = jω na equação característica : 1 + KG(s)H(s) = 0, igualando a parte imaginária a zero para determinar ω e, com este valor, igualar a parte real a zero para determinar o valor de K. Exemplo: Im : 3 2 0 K 1 0, Frequências onde o KG ( s) H ( s) 3 2 s 3s 2s 2,3 1,41 lugar das raízes cruza o eixo jω. 1 KG( j ) H ( j ) 0 1 K 0 3 2 ( j ) 3( j ) 2 j Re : 3 2 K 0 p / 1 0 K 0, p / 2,3 1,41 3 1,41 K 0 2 j 3 3 2 2 j K 0 K 6 K=0 e K = 6Valores do ganho para deslocar os pólos de malha fechada para os pontos de cruzamento sobre o eixo jω (ω1, ω2, ω3,) . Exercício: Construa o lugar das raízes (root locus) para o seguinte sistema: Im : 3 2 0 1 0, 2,3 1,41 Re : 3 2 K 0 p / 1 0 K 0, p / 2,3 1,41 3 1,41 K 0 K 6 2 REGRA 10: Se pelo menos dois ramos do lugar das raízes vão para o infinito, então a soma dos pólos de malha fechada correspondente a um mesmo K é uma constante independente de K. Exemplo: Considerando o seguinte sistema: G( s) H ( s) K s( s 1)(s 2) Exemplo: Continuação... 3,26 0,13 j1,68 0,13 j1,68 3 K 9,3 2,77 0,114 j1,16 0,114 j1,16 3 K 3,75 LOCALIZAÇÃO DO PÓLO ASSOCIADO AO GANHO: a determinação do ganho K associado a um ponto P do lugar das raízes é obtida a partir do cálculo do módulo da equação 1 KG(s) H (s) 0 Que é reescrita para determinação do módulo como KG(s) H (s) 1 KG(s) H (s) 1 Uma vez que 0 < K < ∞: K G(s)H (s) 1 K 1 G( s ) H ( s ) s p Exemplo: Considerando o seguinte sistema: G( s) H ( s) 1 s( s 1)(s 2) Qual o valor de K associado ao ponto sobre o root locus s1,2 = -0,179±j1,01? 1 K 0,179 j1,01 0,179 j1,01 1 0,179 j1,01 2 G( s) H ( s) K 2,76 Exercício: (a) Construa o lugar das raízes (root locus) para o seguinte sistema. (b) Desloque os pólos complexos do sistema de tal forma que passem pelo ponto p= -1,5±1,47j, determinando o ganho K relacionado a tal posição. s 2 4s 3 KG(s) H (s) K 3 s 4s 2 3,5s 10 Exercício: continuação... s 2 4s 3 KG(s) H (s) K 3 s 4s 2 3,5s 10 Regra1: Regra3: (2i 1)180o ; i 0,1,2,... N p Nz Regra4: polos zeros C.G. N p Nz C.G. Regra2: Sobre eixo real 3,77 0,113 1,62 j 0,113 1,62 j 1 3 3 2 C.G. 0 Exercício: continuação... Regra5: s 2 4s 3 KG(s) H (s) K 3 s 4s 2 3,5s 10 d G ( s) H ( s)1 0 ds REGRA 6: as ramificações do local das raízes deixam ou entram no eixo real com ângulos de ± 90º. REGRA 7: o local das raízes é simétrico em relação ao eixo real porque as raízes são números complexos conjugados. Exercício: continuação... s 2 4s 3 KG(s) H (s) K 3 s 4s 2 3,5s 10 Regra 8: p1 p 2 p3.... z1 z 2 z 3... (2i 1)180o p1 p 2 p3 z1 z 2 180o p1 p 2 p3 z1 z 2 180o Regra 9 e 10: Não são necessárias neste exemplo. Exercício: continuação... Ganho K para pólo em p: p= -1,5±1,47j K 1 G( s ) H ( s ) s p Exercício: continuação...pólos para K=3,93 p= -1,5±1,47j
Baixar