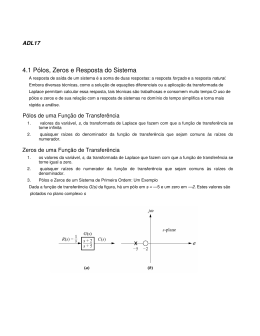
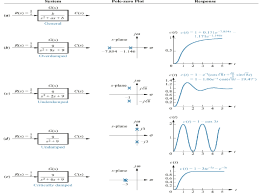
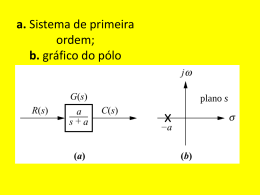
Análise de Resposta Transitória e de Regime Estacionário 5.1 Introdução 5.2. Sistemas de Primeira Ordem 5.3. Sistemas de Segunda Ordem Prof. André Marcato Livro Texto: Engenharia de Controle Moderno – Quarta Edição – Editora Pearson Prentice Hall – Autor: Katsuhiko OGATA 1 Introdução Análise de um sistema de controle: Obtenção de um modelo matemático Analisar o desempenho do sistema a partir de vários métodos disponíveis Sinais de Entrada Aula 13 Geralmente, não são conhecidos previamente Análise e projeto de sistemas de controle Deve-se ter uma base de comparação de desempenho de vários sistemas de controle Deve-se detalhar os sinais de teste da entrada frente aos diversos tipos de sistemas de controle Sinais Típicos de Teste Sinais de teste geralmente utilizados: Determinação dos sinais típicos de teste: Aula 13 Funções degrau, rampa, parábola de aceleração, impulso, senoidal Análise do comportamento da entrada que o sistema será submetido com maior freqüência sob condições normais de operação. Se são funções de tempo que variam gradualmente: rampa Se o sistema está sujeito a variações bruscas na entrada: impulso Resposta Transitória e Resposta Estacionária Resposta Transitória: Vai do estado inicial ao estado final. Resposta Estacionária: Comportamento da saída do sistema à medida que t tende ao infinito Também chamada de Solução Homogênea Também chamada de Resposta Forçada ou Solução Particular Resposta do Sistema Aula 13 Pólos de Uma Função de Transferência Aula 13 1. Valores da variável complexa, s, da Transformada de Laplace, que levam o valor da função de transferência tender ao infinito 2. Quaisquer raízes do denominador da função de transferência que são comuns às raízes do numerador Zeros de Uma Função de Transferência Aula 13 1. Os valores da variável complexa, s, da Transformada de Laplace que anulam o valor da função de transferência 2. Quaisquer raízes do numerador da função de transferência que são comuns às raízes do denominador. Estabilidade Absoluta de Um Sistema de Controle Linear, Invariante no Tempo Previsão do comportamento dinâmico do sistema, a partir do conhecimento de seus componentes Estabilidade Absoluta: O sistema é estável ou instável? Aula 13 Sistema está em equilíbrio se, na ausência de qualquer distúrbio ou sinal de entrada, a saída permanece no mesmo estado Sistema é estável se a saída sempre retorna ao estado de equilíbrio quando o sistema é submetido a uma condição inicial Estabilidade Relativa de um Sistema de Controle Linear, Invariante no Tempo Aula 13 O sistema será criticamente estável se as oscilações do sinal de saída se repetirem de maneira contínua O sistema será instável se a saída divergir sem limites a partir do estado de equilíbrio quando o sistema for sujeito a uma condição inicial Nos casos reais, o sinal de saída de um sistema físico pode aumentar até certo valor, mas pode ser limitado por fins de curso mecânico, ou o sistema pode se romper, ou se tornar não linear, etc. Estabilidade Relativa e Erro Estacionário Devido a energia armazenada no sistema, a saída do mesmo não segue imediatamente a entrada. Aula 13 Apresenta uma resposta transitória antes que o regime permanente seja obtido A resposta transitória, geralmente, apresenta oscilações amortecidas antes de atingir o estado permanente. Se o sinal de saída permanente não corresponder exatamente ao sinal de entrada, diz-se que o sistema apresenta um erro estacionário. O erro estacionário deve sempre ser avaliado na análise de sistemas de controle. Sistemas de Primeira Ordem São sistemas diferenciais que envolvem apenas a primeira derivada da saída na sua equação. Aula 13 Sistemas de Primeira Ordem Resposta ao Degrau Unitário A Transformada de Laplace da Função Degrau Unitário é 1/s Aula 13 Sistemas de Primeira Ordem Resposta ao Degrau Unitário Aula 13 Sistemas de Primeira Ordem Resposta à Rampa Unitária A Transformada de Laplace da Função Rampa é 1/s2 Aula 13 Sistemas de Primeira Ordem Resposta à Rampa Unitária Aula 13 Sistemas de Primeira Ordem Resposta ao Impulso Unitário Aula 13 Propriedade Importante de Sistemas Lineares Invariantes no Tempo Aula 13 Pólos e Zeros de Um Sistema de Primeira Ordem – Um Exemplo (1) Aula 13 Pólos e Zeros de Um Sistema de Primeira Ordem – Um Exemplo (2) Aula 13 Pólos e Zeros de Um Sistema de Primeira Ordem – Um Exemplo (3) Um pólo sobre o eixo real gera uma resposta exponencial da forma e-αt, da função entrada gera agera forma da resposta forçada (isto OsUm zeros pólo e pólos na geram deas transferência amplitudes tanto apara forma a resposta da resposta forçada natural onde –α, éé,apara pólo sobre opode eixoa ser real. Assim olocalização pólo na origem gerou uma função degrau saída. quanto a(isto resposta é, do o pólo natural em (isto -5 gerou função percebido e-5tna ) quanto pelosmais à esquerda no eixo real negativo, cálculos deestiver A1 e A2 um pólo, mais rápido o decaimento da resposta transiente exponencial para zero. Aula 13 Funções de Primeira Ordem Obtidas Experimentalmente Características de um sistema de primeira ordem: 1) Não presença de sobrevalor 2) inclinação inicial não nula. Aula 13 Sistemas de Segunda Ordem (1) São sistemas diferenciais que envolvem apenas a primeira e a segunda derivada da saída na sua equação. Aula 13 Enquanto a variação de um parâmetro no sistema de primeira ordem simplesmente altera a velocidade da resposta, as variações nos parâmetros de um sistema de segunda ordem podem alterar a forma da resposta. Sistemas de Segunda Ordem (2) Aula 13 Sistemas de Segunda Ordem (3) Aula 13 Sistemas de Segunda Ordem (4) Aula 13 Resposta Superamortecida 1 Pólo na origem: Entrada Degrau Unitário → Gera Resposta Forçada 2 Pólos Reais: Decorrentes do Sistema → Gera Resposta Natural Aula 13 Resposta Subamortecida 1 Pólo na origem: Entrada Degrau Unitário → Gera Resposta Forçada 2 Pólos Complexos: → Gera Resposta Natural Aula 13 Decorrentes do Sistema Parte Real: Freqüência de decaimento exponencial (inverso da parte real do polo) Parte Imaginária: Freqüência de oscilação senoidal Resposta Não Amortecida 1 Pólo na origem: Entrada Degrau Unitário → Gera Resposta Forçada 2 Pólos Complexos: Resposta Natural Aula 13 Decorrentes do Sistema → Gera Parte Real: Nula. Exponencial que não apresenta decaimento. Parte Imaginária: Freqüência de oscilação senoidal Resposta Criticamente Amortecida 1 Pólo na origem: Entrada Degrau Unitário → Gera Resposta Forçada 2 Reais e iguais (coordenada -3). Geram uma exponencial simples e uma exponencial multiplicada pelo tempo. São as repostas mais rápidas possíveis sem ocorrência de sobrevalor. Aula 13 Resposta ao Degrau para os Casos de Sistemas de Segunda Ordem Amortecidos Aula 13
Baixar