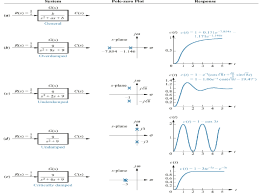
Laboratório de Controle Prof. Alexandre Brincalepe Campo www.cefetsp.br/edu/brinca/federal.html NOME 1 dígitos Prontuário 3 4 5 2 4 6 7 6 Roteiro 2 – Análise de Sistemas de Primeira e de Segunda Ordem Teorema do Pode-se partir cálculo Valor Final obter o valor de uma função f(t) quando t tende a infinito a da análise de sua representação no domínio de Laplace. Para o do valor final aplica-se:: lim f (t ) lim sF ( s) t s 0 Modelagem experimental Parte 1 – Sistema de primeira ordem Pode-se obter a função de transferência de um sistema através da análise da relação entre os sinais aplicados em sua entrada e os sinais obtidos em sua saída. A seguir serão apresentados procedimentos experimentais para a obtenção da função de transferência de alguns sistemas típicos. Os métodos abaixo são denominados Métodos Determinísticos e são utilizados quando a relação sinal-ruído é suficientemente alta. 1 – Sistema de Primeira Ordem Caso um sistema possua uma função de transferência do tipo: W ( s) K F ( s) E ( s) s a ao aplicar uma entrada degrau de amplitude A, o sinal representado por: A E ( s) s dessa forma o sinal de saída será: (Supondo w(0) = 0) W ( s) A.K s( s a) que possui a seguinte representação no domínio do tempo: w(t ) KA (1 e at ) a O gráfico de w(t) genérico está representado abaixo: E(s) será Laboratório de Controle – E4 – Prof. Alexandre Brincalepe Campo www.cefetsp.br/edu/brinca/federal.html Utilizando a resposta do sistema ao degrau de amplitude A é possível determinar os parâmetros K e a. Passo 1 – Determinação da relação entre os parâmetros K e a. Após a realização do ensaio pode-se medir o valor de regime do sinal de saída do sistema (Wreg) através do gráfico obtido. Lembrando que a função do sinal de saída é: KA w(t ) (1 e at ) a teremos para t : KA KA lim w(t ) lim (1 e at ) t t a a Portanto KA Wreg a Dessa forma, como A e Wreg são conhecidos, pode-se obter a relação entre K e a. K Wreg a A Passo 2 – Determinação dos parâmetros K e a. Para determinar o valor de cada um dos parâmetros, basta medir o tempo entre o instante em que o degrau foi aplicado e o instante em que o sinal de saída atinge 63,2% do valor de regime (Wreg). A validade deste cálculo pode ser verificada através de: a KA KA 1 KA a w 1 e a 1 0,368 0,632 a 0,632Wreg a a Resumo: Para obter os parâmetros K e a de um sistema que tenha função de transferência de primeira ordem basta: - Aplicar um degrau com amplitude A no sistema. - Medir o sinal de saída, anotando o valor de regime Wreg e o tempo decorrido entre a aplicação do degrau e o instante em que o sinal de saída atinge 63,2% do valor de regime. 2 Laboratório de Controle – E4 – Prof. Alexandre Brincalepe Campo www.cefetsp.br/edu/brinca/federal.html - O valor de a é igual ao inverso do tempo medido no passo anterior. - O valor de K pode ser obtido de: aWreg K A Parte 2 – Sistema de Segunda Ordem Determinar ζ , ωn e k num sistema descrito pela equação: n C ( s) k k 2 2 2 2 R( s) s 2 n s n n s 2 n s n 2 2 Sabe-se que o sistema de segunda ordem na forma padrão possui os seguintes parâmetros descritivos: Tempo de subida (tr) tr 1 arctg d d n dado que d n 1 2 com: d n 1 2 Tempo de pico (tp) tp d n 1 2 Sobre-sinal (Mp) O sobre-sinal pode ser calculado através da seguinte equação: Mp c(t p ) c() c ( ) e 2 1 trata-se de um índice entre 0 e 1 que, multiplicado por 100, fornece a porcentagem que o sinal atingiu acima do valor final da função no instante tp. O valor do sobre-sinal também pode ser calculado através de: Mp c(t p ) c() c ( ) (O valor de Mp pode ser dado em porcentagem, quando Mp acima calculado for multiplicado por 100) Na figura abaixo temos uma relação entre os parâmetros apresentados e o posicionamento dos pólos do sistema de segunda ordem: Na figura abaixo temos os mesmos parâmetros indicados numa resposta ao degrau unitário de um sistema de segunda ordem: 3 Laboratório de Controle – E4 – Prof. Alexandre Brincalepe Campo www.cefetsp.br/edu/brinca/federal.html Tempo de acomodação (ts) – Critério de 2% ts 4 n Pode-se medir o valor de regime do sinal de saída quando é aplicado um sinal degrau de amplitude A em sua entrada. Neste caso, através da aplicação do Teorema do Valor Final, temos: C ( s) k k k A 2 C ( s) 2 R( s ) C ( s ) 2 2 2 2 R( s) s 2 n s n s 2 n s n s 2 n s n s Aplicando o Teorema do Valor Final: creg lim c(t ) lim s t s 0 k s 2 2 n s n 2 A kA creg lim c(t ) 2 t s n Analisando a equação acima, pode-se perceber que o valor de k é obtido a partir dos valores de creg, que é o sinal de regime na saída do sistema, n , que é a freqüência natural não amortecida do sistema, obtida a partir da medição de tp e Mp e, finalmente, do valor de A, que é o valor da amplitude do sinal aplicado na entrada do sistema. Portanto: k c reg n 2 A Comandos MATLAB Comando pzmap É possível desenhar o mapa de pólos e zeros de uma dada transferência no Matlab através deste comando, cuja sintaxe é: função de figure(1) pzmap(H) grid onde H é a função de transferência H(s). 4 Laboratório de Controle – E4 – Prof. Alexandre Brincalepe Campo www.cefetsp.br/edu/brinca/federal.html Comando zpk É possível definir uma função de transferência no Matlab através dos seus pólos, zeros e do ganho. A sintaxe da função é: H=zpk(Z,P,K) onde Z é um vetor com os zeros da função, P é um vetor com os pólos e K é o ganho do sistema. Exemplo: H = zpk([],[-1 -3],10) Resultando em: Zero/pole/gain: 10 ----------(s+1) (s+3) Exercícios Exercício 1 – Construir programas em MATLAB em que as seguintes funções de transferência FN(s) sejam construídas. Aplique um degrau R(s) na entrada de cada uma delas e desenhe o sinal obtido na saída do sistema. Calcule o pólo de cada um dos sistemas abaixo. a) F ( s) 10 e R( s) 1 s s b) F ( s) e R( s) 0,1 2 s 0.2s 1 Exercício 2 – Calcule uma função de transferência que apresente a seguinte resposta ao sinal degrau de amplitude 10 aplicado à entrada. Exercício 3 – Construa programas em MATLAB que simulem as seguintes funções de transferência FN(s), aplique um degrau R(s) na entrada de cada uma delas e desenhe o sinal obtido na saída do sistema. Calcule os pólos de cada uma das funções de transferência e meça os parâmetros ζ, ωn e ωd para cada uma das funções de transferência. Apresente os gráficos do mapa de pólos e zeros de cada uma das funções de transferência abaixo. 5 a) F ( s) e R( s) 10 1 s s 2 s 10 b) (Obs. Esta função deve ser normalizada, ou seja deve-se dividir o numerado e o denominador por β) e R( s) 2 F2 ( s) 2 s s 15s 1 c) Note que a função a seguir é de terceira ordem. Analise sua resposta ao degrau e construa uma nova função de transferência que apresente uma resposta com as mesmas características (ζ, ωn e ωd). 1 e R( s ) 1 F3 ( s) 2 s ( s s 4)(s 30) Obs.: Verifique a “dominância” dos pólos mais próximos do eixo complexo. 5 Laboratório de Controle – E4 – Prof. Alexandre Brincalepe Campo www.cefetsp.br/edu/brinca/federal.html Exercício 4 – Dados os gráficos abaixo, calcule os parâmetros M p, tp , ts e tr e obtenha as funções de transferência de segunda ordem que possuem o mesmo comportamento apresentado nos gráficos quando é aplicado um degrau de amplitude igual a cinco (R(s) = 5/s) em suas entradas. Os cálculos serão aproximados em função das leituras feitas nos gráficos abaixo. Exercício 5 – Atribua valores para as variáveis: ζ (zeta) e ω n (freq_nat) num sistema de segunda ordem na forma padrão de acordo com a tabela mostrada a seguir: Caso ζ (zeta) ωn (freq_nat) 1 0 1 2 0.5 1 3 0.5 10 4 1 1 5 1 10 6 2 1 Sistema de segunda-ordem na forma padrão: n C ( s) 2 R( s) s 2 n n 2 2 - Aplique o sinal degrau unitário em sistemas com os seguintes valores de ζ (zeta) e ωn (freq_nat) e faça uma análise de cada um dos casos da tabela. 6 Laboratório de Controle – E4 – Prof. Alexandre Brincalepe Campo www.cefetsp.br/edu/brinca/federal.html Exercício 6 – Calcule a função de transferência que Vo (s)/Vi (s) no circuito abaixo em função de R, L e C: Escolha valores para R, L e C de tal forma que o sistema resultante seja: Caso 1) Sub-amortecido (ζ < 1, ou seja, pólos complexos conjugados), Caso 2) Criticamente amortecido (ζ = 1, ou seja, pólos reais e iguais) e Caso 3) Sobre-amortecido (ζ >1, ou seja, pólos reais e diferentes). Determine ζ , ωn e k para cada um dos casos acima, lembrando que a forma padrão do sistema de segunda ordem pode ser obtida através de: n C (s) k k 2 2 2 2 R( s ) s 2 n s n n s 2 n s n 2 2 Exercício 7 – Faça um programa que crie funções de transferência tal que o polinômio do denominador tenha as seguintes raízes: F ( s) k den a) Pólo único em -1 e k igual a 1. b) Pólos em -30 e -1 e k igual a 30. c) Pólos em -2 e -2 e k igual a 4. d) Pólos em -1+2j e -1-2j e k igual a 5. e) Pólos em -1+10j e -1-10j e k igual a 100. f) Pólos em -10, -1+2j e -1-2j e k igual a 50. g) Pólos em -1, -1+2j e -1-2j e k igual a 5. Obs. Em todos os casos a função de transferência possui apenas zeros no infinito. - Deseja-se comparar a resposta ao degrau unitário entre alguns dos sistemas acima, de acordo com os itens abaixo. Utilize a função hold on para desenhar dois gráficos em cada figura. 1) Figura_1 : a) e b). 2) Figura_2 : a) e c). 3) Figura_3 : d) e e). 4) Figura_4 : d) e f). 5) Figura_5 : d) e g) Exercício 8 – Crie uma função de transferência para um sistema de quinta ordem, estável, e que possua dois pólos dominantes complexos. A resposta ao degrau unitário do sistema criado deve ter um sobre-sinal de 15% e seu valor de regime quando é aplicada uma entrada degrau de amplitude 20 (R(s)=20/s) deve ser igual a 10. Apresente o programa com os resultados da simulação, o diagrama de pólos e zeros, a função de transferência criada e o gráfico resultante da aplicação do degrau unitário. 7
Baixar