A Transformada-Z
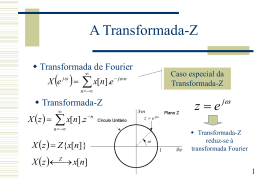
Transformada de Fourier
x[n].e
X e
j
n
Transformada-Z
X z
n
x
[
n
].
z
n
X z Z{x[n]}
j n
Caso especial da
Transformada-Z
ze
j
Transformada-Z
reduz-se á
transformada Fourier
Z
X z
x[n]
1
Transformada-Z de uma
exponencial
X z
a u[n] z
n
k
a z a z
1 a z
1 1
1 0
1
X z
a z
k
k
1
az
1 a z 1
1 0
a z 1
n
k 0
Para a série ser absolutamente
somável devemos ter
1
1 a z 1
a u[1 n] z
n
k
a z 1 1 z a
a z
1
1 n
k
1
1 a z 1
Para a série ser absolutamente
somável devemos ter
a z 1 1 z a
2
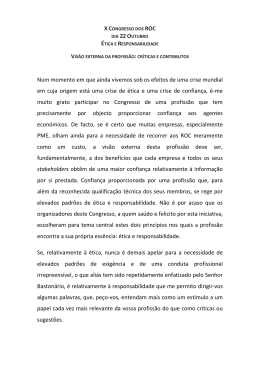
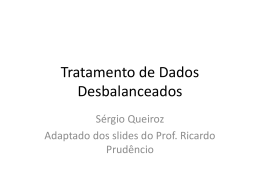
Região de Convergência (ROC)
Zona para a qual a série converge Region of Convergence (ROC)
Corresponde sempre a um disco (sem as
A cinzento
n
fronteiras)
x[n].r
Quando contém o circulo unitário existe
n
É a região de
transformada de Fourier
1
0.5
0
-10
-5
0
Sequência direita
x[n]=0, n<n0
5
10
1
0.5
0
-10
convergência de uma
série de potências
-5
0
5
10
Sequência esquerda
x[n]=0, n>n0
Sequência
bilateral
3
Transformada-Z Racional
Em muitos casos práticos podemos representar a
transformada-Z por uma função racional.
P( z )
X z
Q( z )
Zeros de Q pólos da transformada
Zeros de P zeros da transformada
A ROC não pode conter pólos, estando
limitada por estes.
Corresponde aos casos
em que x[n] pode ser
expresso como uma soma
de exponenciais
complexas
4
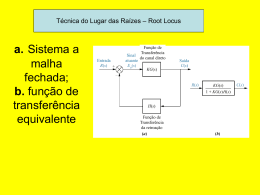
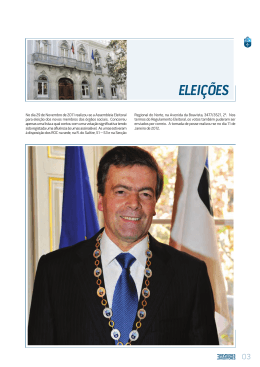
Pólos e Zeros
Zeros
Os pólos
permitem
analisar a
estabilidade
do sistema
Pólos
O ROC está
limitada pelos
pólos!
5
Estabilidade
Sistema causal e estável
Pólos dentro do circulo de raio unitário
Sistema de fase mínima
Sistema estável e de inversa estável
Pólos e zeros dentro do circulo de raio unitário
6
Transformada-Z de Alguns Sinais
Sequência
Transformada
[n]
1
a nu[n]
1
1 a.z 1
n
n.a u[n]
a u[n 1]
n
n.a u[n 1]
n
ROC
Pólo em ‘a’
a.z 1
za
1 a.z
za
1
1 a.z 1
za
1 2
a.z 1
1 a.z
1 2
Pólo duplo em ‘a’
za
Consultar o Livro para uma tabela mais completa
7
Inversão da Transformada-Z
Por Tabelas (casos simples)
Expansão em fracções parciais (funções racionais)
N
M 1
Ak
i
a
z
k
1
k 1 1 d k .z
i 0
Expansão em série (polinómios)
Resolução numérica da equação às diferenças
correspondente.
Nota: (não esquecer a ROC)
8
Propriedades da Transformada-Z
Linearidade
Diferenciação de X(z)
Z
a1 x1[n] a2 x2 [n]
a1. X 1 ( z ) a2 . X 2 ( z )
dX ( z )
n x[n] z
dz
ROC RX
Z
ROC contémRx1 Rx2
Deslocação no tempo
Z
x[n n0 ]
z n0 X ( z )
ROC RX
Multiplicação por
exponencial
Z
z0n x[n]
X ( z / z0 )
ROC z0 RX
Inversão no tempo
Z
x*[n]
X * (1 / z * )
ROC 1 / RX
Valor inicial
x[0] lim(1 z 1 ) X ( z ),
z
se x[n] 0, n 0
Conjugação
Z
x*[n]
X * ( z* )
Convolução no
tempo
Z
x1[n] * x2 [n]
X1 ( z) X 2 ( z)
ROC contémRx1 Rx2
9
Resolução de Equações às
Diferenças
N
M
a . y[n k ] b
k 0
k
m 0
m
.x[n m]
Função de
sistema
TZ
N
ak . y ( z ) z
k 0
k
M
M
bm x( z ).z
m 0
m
y( z)
H ( z)
x( z )
Para o caso de condições iniciais não nulas
existe um regime transitório:
y[n] yF [n] a z
eq. acima
m 0
N
k
a
.
z
k
k 0
Condições
Iniciais Nulas
N
p 0
m
b
.
z
m
k
p p
Regime transitório
(zp – pólos de H(z))
10
Download