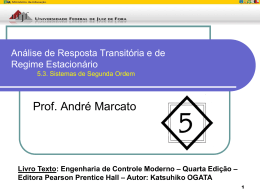
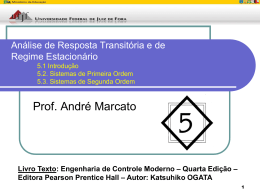
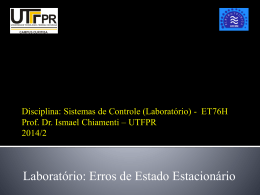
Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação Laboratório da Disciplina CTA-147 Controle I Análise da Resposta Transitória (Este laboratório foi uma adaptação do laboratório montado pelo Professor Paulo Valente da UNESP) INFORMAÇÕES IMPORTANTES 1. 2. 3. 4. 5. 6. As atividades de laboratório deverão ser feitas individualmente, e os relatórios em grupos de até 3 (três) alunos. Caso algum aluno não possa fazer as atividades, no dia previsto de seu laboratório, o mesmo deverá entregar o relatório individualmente. Os trabalhos ou relatórios deverão ser entregues, quando necessário, na semana seguinte depois do laboratório. As soluções deverão ser de forma clara, simples e organizadas. Se houver figuras, tabelas e equações, essas deverão ser numeradas e referenciadas. Não deverá ser utilizado no relatório material já apresentado na introdução. Sempre que houver listagens de sessões do Matlab, estas deverão ser incluídas como apêndices. A folha de rosto do relatório será a página que contém as atividades. OBJETIVO Neste laboratório, você usará o Matlab para avaliar uma importante característica de sistemas lineares e invariantes no tempo que é a resposta transitória. Para se analisar, ajustar e controlar sistemas dinâmicos, é necessário haver uma base para sua identificação e especificação de desempenho, que é feita através da resposta do sistema a excitações padronizadas, segundo as quais são definidas as características de desempenho. O ajuste e projeto dos controladores, por exemplo, devem ter o objetivo de fazer que essas características de desempenho cumpram as especificações. REFERÊNCIAS 1- Material disponível no site do Prof. Leonardo Gonsioroski, http://www.prof-leonardo.com.br. 2- OGATA, K. Engenharia de Controle Moderno. Pearson do Brasil, 4a. Ed., 2010. 3- OGATA, Katsuhiko. Solução de problemas de engenharia de controle com MATLAB. Rio de Janeiro : Prentice-Hall, 1997. INTRODUÇÃO TEÓRICA Entradas de um sistema de controle As excitações ou entradas para sistemas de controle e outros sistemas dinâmicos podem ter caráter aleatório ou determinístico, de acordo com o tipo e a característica de funcionamento do sistema. Funções aleatórias não podem ser expressas analiticamente e não são repetitivas. As funções determinísticas, por sua vez, têm características bem definidas por funções analíticas ou curvas específicas. Uma categoria de sistemas sujeitos a excitações aleatórias é a dos sistemas elétricos de potência, onde os consumidores são livres para ligar e desligar suas cargas a qualquer momento sem aviso da concessionária, que por sua vez tem o compromisso de fornecer energia mantendo constantes a tensão e a freqüência da rede. Outro exemplo é a plataforma de uma câmera utilizada em avião de fotogrametria. O avião voa a uma altitude e a uma velocidade determinadas, e a câmera toma uma série de fotografias do terreno abaixo. Estas fotografias são então montadas umas com as outras para formar um mosaico da área. Torna-se necessário que a plataforma da câmera permaneça nivelada, a despeito dos movimentos do avião. Uma vez que a posição do avião varia devido a rajadas de vento e depende de sua própria estabilidade, a excitação da plataforma é, obviamente, uma função aleatória. Um exemplo de excitação de característica determinística é o molde utilizado numa operação de máquina onde a ferramenta de corte é controlada de modo a reproduzir o contorno do molde. E existem os sistemas de regulação 2 automática, que tem o objetivo de manter as variáveis controladas em valores constantes estabelecidos pelos sinais de referência. Entretanto, para se analisar, ajustar e controlar sistemas dinâmicos, é necessário haver uma base para sua identificação e especificação de desempenho. Isto é feito através da resposta do sistema a excitações padronizadas, sobre as quais são definidas as características de desempenho. O ajuste e o projeto dos controladores devem ter o objetivo de fazer que essas características de desempenho cumpram as especificações. As excitações padronizadas mais freqüentemente usadas para identificação e análise de desempenho de sistemas dinâmicos, e especialmente dos sistemas de controle, são as seguintes: As quatro primeiras excitações são da família de funções singulares. A excitação polinomial é uma combinação linear do degrau e de suas integrais. O degrau é a excitação mais utilizada para a análise e a especificação de desempenho transitório. O impulso pode ser útil para a análise da resposta de sistemas a sinais de grande amplitude e curta duração, e para fins de identificação, já que a TL da resposta a um impulso unitário é igual à função de transferência. E a resposta a entradas senoidais é a base dos métodos de resposta em freqüência, os quais possibilitam a identificação, análise de estabilidade, ajuste e projeto de controladores, e ajuste e projeto de filtros. Outra forma de se perturbar um sistema para fins de análise de transitórios é levá-lo a operar em regime permanente, retirar bruscamente a excitação, e observar a resposta, que nestas condições é a resposta livre: o instante da retirada da excitação é considerado o instante inicial (t = 0), e os valores das variáveis nesse instante são as condições iniciais do sistema. A forma de variação da resposta livre depende tão somente das características dinâmicas do sistema, já que a excitação foi retirada. Portanto, é na resposta livre que tais características podem ser observadas com mais clareza. Desempenho em regime transitório e em regime permanente Verificamos que o primeiro passo na análise de um sistema de controle é derivar um modelo matemático para o sistema. Uma vez obtido tal modelo existem vários métodos disponíveis para análise do desempenho do sistema. Um método utilizado nos sistemas reais é o de se analisar o desempenho, através, dos sinais típicos de teste, apresentados no item 2.1. Este método procura utilizar uma base para comparar o desempenho do sistema, que pode ser obtido comparando-se as respostas de vários sistemas a estes sinais de entrada. Pergunta: Qual ou quais destes sinais de entrada típicos devem ser usados para analisar características do sistema? Resposta: Depende da forma da entrada a que o sistema será sujeito mais freqüentemente durante operação normal. Exemplo: Se as entradas para um sistema de controle são funções que variam gradativamente com o tempo, então a função rampa pode ser um bom sinal de teste; ou então para um sistema sujeito a entradas do tipo choque, uma função impulso pode ser melhor. 3 esposta transitória e resposta em regime permanente Resposta A resposta sta temporal de um sistema de controle é em geral dividida em duas partes: a. b. Resposta transitória Resposta em regime permanente Sendo c(t) uma resposta temporal; então em geral, ela pode ser escrita como: Resposta em Regime Permanente A definiçãoo de regime permanente não é padronizada nos estudos de sistemas e teoria de redes. i. Em análise de redes, às vezes é útil definir regime permanente como uma condição em que a resposta atingiu um valor constante em relação à variável independente. ii. Em estudo udo de sistemas de controle, porém, é mais adequado definir regime permanente como a resposta fixada quando o tempo tende para o infinito. Portanto, uma onda senoidal é considerada como uma resposta em regime permanente, porque seu comportamento é fixado para p ara qualquer intervalo de tempo, assim como para o tempo tendendo a infinito. Da mesma forma, a função rampa c( t ) = t é considerada uma resposta em regime permanente, embora cresça com o tempo. Resposta transitória É definida como a parte da resposta que vai para zero quando o tempo se torna grande. Portanto, Portanto ct ( t ) tem a propriedade: 4 SISTEMAS DE PRIMEIRA ORDEM A discussão é baseada em uma equação diferencial de primeira ordem do tipo onde: = constante de tempo (proporciona informações sobre a velocidade da resposta do sistema) A = ganho DC (valor final que a saída se aproxima em resposta a um degrau unitário) Sendo a função de transferência dada por Resposta ao impulso unitário de sistemas de primeira ordem Considerando a resposta de um sistema a um impulso quando as condições iniciais são nulas, temos: Resposta ao degrau unitário de sistemas de primeira ordem Resposta a rampa unitária de sistemas de primeira ordem 5 SISTEMAS DE SEGUNDA ORDEM A discussão é baseada em uma equação diferencial de segunda ordem do tipo: onde: = razão de amortecimento = freqüência natural não amortecida Representando o sistema de segunda ordem na forma de função de transferência, temos: Resposta ao degrau unitário de sistemas de segunda ordem sendo a saída c(t) = y(t) , temos como características de desempenho o mostrado na figura 2 6 7 Preparação do Lab3 ATIVIDADES: É fortemente recomendado que esta preparação seja, pelo menos, estudada antes da aula de Laboratório e seja feita e entregue junto nto com o relatório do Laboratório. Devo avisá-los avisá los que se esta preparação não for feita pelo aluno, o mesmo encontrará dificuldades e ficará bastante difícil para ele realizar seu experimento. Leia com atenção e entenda a introdução deste Laboratório, formulando as possíveis dúvidas encontradas em sua leitura e interpretação, transcrevendo-as transcrevendo aqui. ATENÇÃO: Todas as questões abaixo devem ser resolvidas analiticamente Faça o diagrama de blocos e determine, por simplificação, G(s) = G1 (s) × G2 (s) e Gsum (s) = G1 (s) + G2 (s) sendo: 1-Faça 2-Encontre Encontre a função de transferência de malha fechada GCL(s) sendo que G(s) é o mesmo calculado na questão 1, e a realimentação é unitária, ou seja, H (s) =1. 1. 3-Encontre Encontre a resposta ao degrau do sistema, descrito pela função de transferência abaixo. Qual das seguintes funções de transferência de malha fechada tem resposta ao degrau com tempo temp de subida mais 4-Qual longo(mais lento)? Qual se existir, tem o maior sobre-sinal sobre (“overshoot”). 5-Quanto to tempo você espera que o sistema abaixo demore para alcançar o valor 0,32 na resposta a um degrau unitário. 6-Qual Qual das seguintes funções de transferências de malha fechada tem a resposta ao degrau com mais longo long tempo de acomodação. Qual resposta ao degrau não tem sobre-sinal sobre (“overshoot”). 8 7-Qual é o tempo esperado para que a resposta ao degrau do sistema abaixo se estabeleça dentro de 5% do seu valor final. E a resposta ao degrau de qual dos sistemas abaixo oscila mais? 9 ÁLISE DA RESPOSTA TRANSITÓRIA USANDO O MATLAB LABORATÓRIO – ANÁLISE Aluno: ____________________________________________________________ Nº:______________ Aluno: ____________________________________________________________ Nº:______________ Aluno: ____________________________________________________________ Nº:______________ 1- Escreva um arquivo (script-file) file) no Matlab, para solução/simulação de cada um dos itens constantes do Pre-Lab. Antes de resolver os exercícios lembre-se: lembre só serão consideradas as soluções/simulações utilizando o Matlab, ou seja, qualquer resolução com o simulink servirá apenas para sua visualização e possível validação e conferência dos resultados esultados obtidos com o Matlab. Procure sempre usar o comando help para obter informações de funções ou para saber informações sobre sua sintaxe. 2- Os gráficos plotados na figura 1 abaixo mostram a resposta de uma função de transferência simples de 1ª 1 ordem ao degrau unitário. Estime as funções de transferência para as figuras 1a e 1b: Após determinadas as funções ões de transferência, transfer Simule as respostas para um entrada ao degrau unitário unit para validação das mesmas. 3- A figura 2 abaixo, mostra a resposta ao degrau de dois sistemas de 2ª ordem simples com nenhum zero. A função de transferência pode ser parametrizada como: Para os gráficos 2a e 2b, estime os valores de e n das respostas ao degrau. Novamente, Simule os modelos obtidos, através da análise se das curvas, para validação dos mesmos. 10 4- Criar um Script-file para plotar vários gráficos variando os valores da freqüência natural amortecida e o coeficiente de amortecimento. Analisar o comportamento das respostas a entrada ao degrau.
Baixar