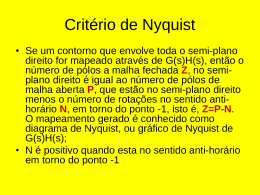
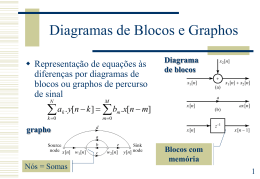
Aula Teorica 9 RESPOSTA EM FREQÜÊNCIA Diagrama Polar Criterio de Estabilidade de Nyquist Conceito de resposta de freqüência: É a resposta em estado estacionário de um sistema quando se estimula com uma entrada sinusoidal cuja freqüência varia de zero até infinito. x(t) Se x(t ) Xsent Sistema linear Então: y(t) y (t ) Ysen(t ) PODE-SE DEMONSTRAR QUE: S jw SUBSTITUINDO NA FUNÇÃO DE TRANSFERÊNCIA OBTÉM-SE A RESPOSTA DE FREQÜÊNCIA (PODE CONSULTÁ-LO EM LIVROS DE TEXTO) EXEMPLO Si Então Y ( s) 5 G( s) X ( s) ( S 5)(S 2) Y ( jw) 5 G ( jw) X ( jw) ( jw 5)( jw 2) OBSERVE QUE G( jw) É UM NUMERO COMPLEXO SE FOR ASSIM ENTÃO SE PODE REPRESENTAR G( jw) G( jw) G ( jw) (Re G ( jw)) (Im G ( jw)) 2 ImG( jw) G( jw) tan Re G( jw) 1 2 EXEMPLO 5 G(s) 20S 1 5 G ( jw) 20 jw 1 5 G ( jw) 2 1 400w 1 G ( jw) tan 20w UMA VEZ QUE SE TEM A EXPRESSÃO MATEMÁTICA QUE REPRESENTA A RESPOSTA DE FREQÜÊNCIA Geralmente DESENHA-HE Diagramas de bode UM DOIS MAGNITUDE(db) VS LOG(W) Diagramas polares FASE VS LOG(W) MAGNITUDE E FASE COM A FREQÜÊNCIA VARIANDO ENTRE ZERO E INFINITO A resposta de freqüência se apresenta em um solo gráfico; fica implícita. Exemplos 5 GH ( s) S (0.2S 1) 2 w0 G(jw) G(jw) -90 w G(jw) 0 G(jw) -270 ESTE É O DIAGRAMA POLAR Exercícios propostos 10 GH ( s ) ( S 2)(S 1) 10 GH ( s ) S ( S 1) 10 GH ( s ) 2 S ( S 1) 10( S 2) GH ( s ) 3 S ( S 1) K GH ( s ) S ( S 2)(S 10) 50 GH ( S ) S ( S 5)(S 1) Critério de estabilidade do Nyquist Primeiro achamos algumas considerações matemática •O critério do Nyquist se apóia no Teorema de transformação de trajetórias no plano complexo: Suponha que temos três planos Suponha que temos uma função de tranferencia 1 G ( s) S 1 e que S=j (0;j1) A B 1 1 j 2 2 3 1 j 2 2 C Observar que um ponto no plano S, significa um ponto no plano GH e também no plano 1+GH Da mesma forma que um contorno fechado no plano S que não passa por nenhum ponto singular do GH ou de 1+GH, este dará um contorno fechado nestes. Com um contorno em S haverá um só contorno no GH ou em 1+GH ? NÃO pode-se demonstrar (Não é objetivo fazê-lo aqui) O número de voltas à origem no plano 1+GH é igual à diferença de zeros e pólos da função de transferência de laço fechado dentro do contorno que achamos feito no plano S SE FORMOS ANALISAR A ESTABILIDADE DOS SISTEMAS . Que contorno vocês acreditam que tenha estabelecido nyquist sobre o plano s? Onde nos interessa saber se houver raizes da equação caracteristica (1+GH=0) para dizer se o sistema é instável? Nyquist definiu uma trajetória no Plano s, que abrange todo o semiplano direito. j Seção II s lim Re j Seção I 0w Seção III w0 2 R 2 A trajetória do Nyquist abrange todos os pólos e zeros de 1+GH no semiplano direito. O critério do Nyquist estabelece O número de voltas à origem no Plano 1+GH é igual à diferença de zeros e pólos que se encontram dentro do contorno no Plano S N=Z-P N: # de voltas à origem no Plano 1+GH Z: # de zeros de 1+GH dentro do contorno do plano S P: # de pólos de 1+GH dentro do contorno do plano S Para que o sistema seja estável que valor deve tomar Z? Z 0 Então Se o 1+GH tiver K pólos edentro do contorno Se o 1+GH não tiver pólos edentro do contorno N 0 N K Isto quer dizer que ao percorrer o contorno do Nyquist no plano S , deve encerrar-se K vezes a origem no plano 1+GH no sentido antihorario Isto quer dizer que ao percorrer o contorno do Nyquist no plano S , NÃO deve encerrar a origem no plano 1+GH Para que o sistema seja estável Agora bem Trabalhar no plano 1+GH é muito difícil Pergunto então Como deslocar todo este critério do Nyquist ao plano GH que se trabalha muito mais fácil e que nos permitirá, conhecendo a função de transferência de laço aberto, determinar a estabilidade do sistema em laço fechado? Observem Tudo o que se disse com respeito à origem quando trabalhamos com 1+GH agora é válido para o GH mas com respeito ao ponto (1;0) Agora O critério do Nyquist estabelece O número de voltas ao ponto (1;0) no Plano GH é igual à diferença de zeros e pólos que se encontram dentro do contorno no Plano S Mas N: # de voltas ao ponto (1;0) no Plano GH Z: # de zeros de 1+GH dentro do contorno do plano S P: # de pólos de GH dentro do contorno do plano S No caso que G(s)H(s) tenha pólos ou zeros sobre o eixo j, então terá que modificar a trajetória do Nyquist. Geralmente se deixam fora da trajetória os pólos e zeros que estão sobre o eixo imaginário. modifica-se a trajetória na origem e além das três anteriores aparece a secció IV secció IV s lim Re j 2 R 0 2 Todo o resto é igual EXEMPLOS G(s) H (s) K s (Ts 1) Im 0- -1+j0 = X Re N=0 P=0 Z=0 0+ Sistema estável G ( s) H ( s) = K 1 sT K =0 N=0 P=1 Z=1 Sistema inestável 5 G(s) s1 s Im =0- N=0 P=1 Z=1 = Re =0+ Sistema inestável Exercicios
Baixar