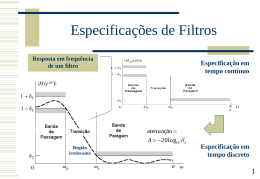
Especificações de Filtros Resposta em frequência de um filtro Especificação em tempo contínuo atenuação A 20 log10 2 Região irrelevante Especificação em tempo discreto 1 FIR FIR – Finite Impulse Response Filter (Resposta ao Impulso Finita) M M m 0 m 0 y[n] bm .x[n m] H ( z ) bm .z m Coeficientes da resposta impulsiva do filtro Só tem zeros sempre estáveis M – ordem do filtro (ordem do polinómio H(z)) Numero de coeficientes é do filto é M+1=N 2 IIR IIR – Infinite Impulse Response Filter (Resposta ao Impulso Infinita) N M a . y[n k ] b .x[n m] k 0 k m 0 m Corresponde a uma equação às diferenças. Implementa uma equação às diferenças em que a saida não depende directamente apenas de valores passados da entrada mas tambem da saida. M H ( z) m b . z m m 0 N k a . z k k 0 Contêm zeros e pólos Sistemas recursivos N – ordem do filtro Ordem do polinomio no denominador 3 FIR vs IIR FIR São sempre estáveis Permitem facilmente fase linear Podem necessitar de ordem elevada IIR Menor peso computacional 4 Projecto de Filtros FIR Método da Janela Especificação de uma resposta ideal na frequência e determinação da resposta impulsiva correspondente (teoricamente ou numericamente (IFFT)): 1 hd [n] 2 H d (e j ) Multiplicação por janela: h[n] hd [n d ]w[n] Atraso da janela 1, Janela w[n] rectangular: janela 0nM 0, cc j j H ( e ) e d d Pode ser infinita e não causal truncagem d M /2 5 Janela Rectangular j W (e ) e jM / 2 sin[ ( M 1) / 2] sin[ / 2] 6 Outras Janelas Bartlett (triangular) 2n / M , 0 n M / 2 w[n] 2 2n / M , 0 n M / 2 0, cc Rectangular 1, 0 n M w[n] 0, cc Hanning 0.5 0.5 cos(2 n / M ), 0 n M w[n] 0, cc Hamming 0.54 0.46cos(2 n / M ), 0 n M w[n] 0, cc Blackman 0.42 0.5 cos(2 n / M ) 0.08cos(4 n / M ), 0 n M w[n] 0, cc 7 Método das Janelas Hideal (e j ) 1 A largura da banda de transição Pode ser aproximada pela Largura do lóbulo principal, Δω, da janela. 1 / c c / 2 c / 2 A resposta em frequência depois de aplicar a janela corresponde uma versão suavizada da resposta em frequência do sistema original. 1 c / 2 c / 2 8 Janelas Rectangular (o riple ou a atenuação nunca baixam de 20dB por maior que seja a ordem! Fenómeno de Gibbs) Hamming triangular Blackman Hanning 9 Janelas No método das janelas temos 1 = 2, = e portanto A=20log10 10 Janela de Hanning n' n M / 2 w[n] (0.5 0.5 cos(2 n / M )) wR [n] w[n' ] (0.5 0.5 cos(2 n' / M )) wR [n' ] 2 2 W (e j ) ( ) 2 M 2 M W (e j ) j .WR (e ) WR (e j ) sin[ ( M 1) / 2] WR (e ) sin[ / 2] WR – Janela Rectangular j W – Janela Hanning 11 Janela Kaiser I 0 [ (1 [(n ) / ]2 )1/ 2 ] w[n] I 0 ( ) 0, cc 0nM M /2 Funções de Bessel modificadas de ordem zero 0.1102( A 8.7), A 50 0.5842( A 21) 0.4 0.07886( A 21), 21 A 50 0.0, A 21 s p Ordem do filtro (dB) A8 M 2.285 A 20 log10 Permite trocar largura do lobo principal por amplitude do lobo secundário 1 2 É simples obter e M dadas as especificações 12 Ex: Projecto Diferenciadores em tempo discreto A resposta em frequência de um diferenciador ideal será, j Hdifrenciador (e ) ( j) e j M / 2 Nota: Tal corresponderá a amostragem do sinal derivada de um sinal de entrada amostrado dentro dos limites do crtitério de Nyquist A que corresponde um diferenciador com resposta impulsiva dada por: 1 h[n] 2 j M / 2 j n ( j e ). e d h[n] cos( nX ) sin( nX ) 2 nX nX Notar que: (m n) * h[n] m nX n M / 2 h[ M / 2] 0 Notar os limitações de aplicação!!! 13 Ex: Diferenciadores em tempo discreto (com janela de kaiser) ordem par (20) tipo I ordem impar (21) tipo II 1 1 0 0 -1 -1 fase 0 5 10 amostras 15 20 0 3 3 2 2 1 1 0 0 0.5 1 1.5 2 2.5 3 3.5 0 0 5 0.5 10 amostras 1 1.5 2 15 2.5 20 3 Angulo (rad) Angulo (rad) A implementação tipo I normalmente resulta numa oscilação maior devido ao zero em , mas reduz ruido de alta frequencia 3.5 14 Projecto Equiriple de FIR Janela rectangular minimiza 1 2 2 H j d j 2 (e ) H (e ) d Outro critério é o do erro máximo max H d (e j ) H (e j ) Filtros de oscilação constante (equiriple) M Resulta em filtros de menor ordem do que pelo método das janelas 10 log( 1 2 ) 13 2.324 Parks-McClellan algorithm 15 Projecto Equiriple Erro quadrático mínimo (janela rectangular) Óptimo sinais de banda larga, ex: ruído branco Equiriple (erro máximo mínimo) Garante que qualquer sinal fora da banda é atenuado pelo menos A dB Projecto para o pior caso, ie, sinais de banda estreita junto à banda de transição 16 Projecto de Filtros IIR Conversão de Filtros Analógicos •Aproveita os resultados dos sistemas analógicos Transformação Bilínear Provoca uma transformação na frequência • Um mapa do plano-s para o plano-z 2 tan( / 2) 2 1 z 1 T s T 1 z 1 2arctan(T / 2) Mapa exacto seria (AD->DSP->DA): sT e z 17 Transformação Bilínear Transforma o semi-plano complexo esquerdo no circulo unitário! Sistemas estáveis resultam em sistemas estáveis Transformação na frequência: 2 1 z 1 s 1 T 1 z Especificações devem ser ajustadas de forma a compensar a transformação 1 (T / 2) s z 1 (T / 2) s 18 Transformação bilinear A transformação bilinear corresponde a utilização de um método de integração trapezoidal 2 1 z 1 s Função de transferência 1 T 1 z H ( s) 1 / s de um integrador y ( z ) T 1 z 1 x[n] x[n 1] y[n] y[n 1] T H ( z) 1 x( z ) 2 1 z 2 Área do trapézio 19 Invariância ao Impulso AK H ( s) k s sK h(t ) AK e sK t u[t ] TL1 k amostragem AK H ( z) 1 1 z z k k TZ zk e hn AK zk u[n] n k sk T 20 Filtros Butterworth São filtros que têm uma característica de amplitude maximamente plana na banda de passagem. Têm a seguinte resposta em amplitude: 2 1 H c ( j) 1 ( j / jc ) 2 N H C ( j) 1 /( / C ) 2 N 2 A sua transformada de Laplace é constituída apenas por pólos nas posições: s e( j / 2 N )( 2k N 1) k C H ( s) 1 N (1 s / s ) k k 1 21 Filtros Chebyshev Permitem oscilações na banda de passagem de forma permitir a utilização de filtros de menor ordem relativamente ao Butterworth. 1 H c ( j) 1 2VN2 ( / c ) 2 V0 ( x) 1 V1 ( x ) x V2 ( x) 2 x 2 1 VN 1 ( x) 2 xVN ( x) VN 1 ( x) H C ( j) 1 / 2 4 N 1 ( / C ) 2 N 2 22 Comparação de Filtros IIR Butterworth Resposta em frequência maximamente plana Chebyshev Maior atenuação mas pior resposta de fase Qualquer deles tem distorção de fase ao contrário dos filtros FIR que têm fase linear! 23 Filtros passa-banda Projecto em tempo continuo Transformação passa-baixo passa banda Escolher o tal que, B Especificações P1 P2 o2 S1 S 2 o2 P1 P 2 ou mais apertadas TPassa Banda (s) TPassa Baixo (S ) S s 2 02 Low Pass 2 0 2 B P 2 Low Pass 1 P1 Low Pass 1 Bs S 2 / 1 Low Pass 1 B Low Pass 2 S 2 S 1 P 2 P1 1 4 02 B 2 2Low Pass 24 Filtros passa-banda o2 S1 S 2 S P 2 P1 P1 S 2 B P 2 P1 S 2 S 1 P 2 P1 Deve-se escolher P1 e P2 de forma que: o2 P1 P 2 Mas garantindo que P1< P1real e P2> P2real 1 S 25
Baixar