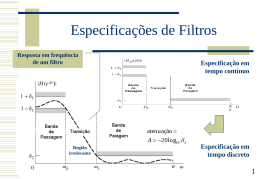
Estruturas de Filtros Digitais Prof. José Maurício Neto [email protected] 1 Filtros Digitais • Os filtros Digitais são divididos em dois grupos básicos: – Filtros FIR – Filtros IIR 2 Estruturas para Sistemas FIR (Finite Impulse Response) • Equação de diferença de um sistema FIR de ordem M M 1 y [] n b [n k ] kx k 0 • Função de transferência M 1 k H (z) bz k k 0 • Resposta ao impulso b , 0 n M 1 n h [ n ] 0 , c a s o c o n t r a r i o 3 Estruturas FIR: Forma Direta I M 1 y [] n h [n k ] kx k 0 4 Estruturas IIR (Infinite Impulse Response): Forma Direta I • Os sistemas discretos lineares e invariantes no tempo se caracterizam por sua função de transferência racional: M N M y [ n ] a y [ n k ] b x [ n k ] k k k 1 k 0 k b z k H(z) k0N 1akzk k1 A realização de uma estrutura especifica depende de: Complexidade computacional Requisitos de memoria Efeitos de quantificação (hardware e software) 5 Estruturas IIR (Infinite Impulse Response): Forma Direta I • Para a Função de Transferência: M k bz k Yz () H (z) k0N Xz () k 1 az k k 1 M k V () z b z X () z k k 0 1 Vz Yz ( ) N () 1 azk k k1 M Y ( zV ) ( z ) 1 k N H ( z ) . b z k V ( zX ) ( z ) k k 0 1 a z k 1 k v [ n ] b x [ n ] b x [1 n ] . . . b x [ n M ] 0 1 M y [ na ] y [1 n ] . . . a y [ n N ][ v n ] 1 N 6 Estruturas IIR (Infinite Impulse Response): Forma Direta I M v [] n b [n k ] kx k 0 N y [ n ] v [ n ] a y [ n k ] k k 0 7 Estruturas IIR (Infinite Impulse Response): Forma Direta II • Para a Função de Transferência: M bz k Yz () k 0 H (z) N Xz () k 1 az k k k 1 1 M Y ( zW ) ( z ) k N H ( z ) . b z k W ( zX ) ( z ) k k 0 1 a z k 1 k 1 Xz W (z) N () 1 azk k k1 M k Y ( z ) H ( z )( W z ) b z ( z ) 1 k W N w [ n ] a w [ n kx ] [ n ] k k 1 M y [] n b w [ n k ] k k 0 k 0 8 Estruturas IIR (Infinite Impulse Response): Forma Direta II N w [ n ] a w [ n kx ] [ n ] k k 1 M y [] n b w [ n k ] k k 0 9 Diferenças entre as Estruturas IIR: Forma Direta I e II • Na forma direta I: os zeros de H(z), são implementados primeiro, seguidos pelos polos. • Na forma direta II: os polos de H(z), são implementados primeiro, seguidos pelos zeros. • O número de elementos de atraso (delay) nas estruturas forma I e II, estão dados por max(N, M). 10 Diferenças entre as Estruturas IIR: Forma Direta I e II • Teoricamente, a ordem da implementação não afeta o funcionamento do sistema. • Quando uma equação em diferença é implementada em termos de aritmética de precisão finita, pode existir uma significante diferença entre os dois sistemas que são teoricamente equivalentes. 11
Baixar