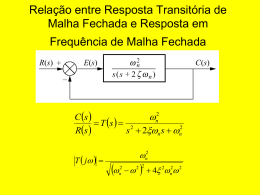
Controle I Aula 2 Características de sistemas de controle Introdução Introdução Introdução Introdução Sistemas de controle são uma parte integrante da sociedade moderna. Diversas aplicações nos rodeiam: • Foguetes e naves espaciais; • Refrigeração em usinagem automática; • Veículos autônomos; • Aeronáutica; • Eletrodomésticos; • Mecatrônica; • Processos químicos; Introdução Os sistemas controlados automaticamente não são criados apenas pelos seres humanos; eles também existem na natureza. • Pâncreas – regula o açúcar no sangue; • Visão – orientação e mapeamento. Definição: “Um sistema de controle é a interconexão de componentes (subsistemas e processos) formando uma configuração de sistema que produzirá uma resposta desejada do sistema”. Em outras palavras, o sistema de controle tem o objetivo de obter uma saída desejada com desempenho desejado, para uma entrada específica fornecida. O que é Controle ? Especificações de Desempenho Sistemas de Controle Saída Entrada Sistema Sistemas de Controle Resposta desejada Dispositivo de atuação Saída Sistema - A saída não tem efeito na ação de controle - Em geral, são simples e baratos, mas sensíveis a distúrbios Sistemas de Controle Resposta desejada (Set P oint) SP Comparação Sinal de controle (Variável manipulada) Controlador MV Sistema Saída (Variável de P rocesso) PV Dispositivo de medida Sensor + Transmissor Há uma comparação da saída real com a saída esperada (toma alguma ação baseada no erro). Sistemas de Controle Sistemas de Controle Sistemas de Controle • Resposta desejada – indicação do piso para onde se pretende ir • Resposta efetiva – variação da altura do elevador com o tempo Requisitos: • pretende-se que não haja desnivelamento final, • quando o elevador para, não deve oscilar em torno da posição em que vai parar, • o comportamento deve ser independente da carga (para certos limites de carga) • a movimentação do elevador deve fazer-se “sem solavancos”. Sistemas de Controle Aplicações – Sistemas de aquecimento central em edifícios – Processos industriais (químicos) OBJETIVO: manter constante a temperatura da água no tanque Sistemas de Controle Duas estratégias de controle: - colocar as torneiras em posições pré-determinadas (malha aberta), - ir atuando nas torneiras em função da avaliação da temperatura da água no tanque (malha fechada). Sistemas de Controle Sistemas de Controle Por que Malha Fechada ??? R(s) Y(s) G(s) R(s) E(s) + G(s) B(s) Malha Aberta H(s) Malha Fechada Y(s) Elementos básicos de um sistema de controle Elementos básicos de um sistema de controle Elementos básicos de um sistema de controle Problemas de controle em engenharia Sistema Modelo Matemático Análise P rojeto Implementação Baseado nas especificações de desempenho Função de Transferência (n) ( n 1) ( n 1) ( n 2) y a1 y ... a n 1y a n y b1 u b2 u ... bn 1u bn u • Aplicando a transformada de Laplace em ambos os lados da equação acima, com condições iniciais nulas: s n a 1s n 1 ... a n 1s a n Y(s) b1s n 1 b 2 s n 2 ... b n 1s b n U(s) Y(s) b1sn 1 b2sn 2 ... bn 1s bn G(s) n n 1 U(s) s a1s ... a n 1s a n Função de Transferência em que Ks z1 s z 2 ... s z n 1 N(s) G(s) K s p1 s p2 ... s pn D(s) z1, z2 , ... , zn1 são os zeros do sistema G (s) 0 p1, p2 , ... , pn são os pólos do sistema G (s) Im P lano complexo s pólos zero Re Função de Transferência Função de Transferência Exemplo Dado Y ( s) 4 2 U ( s) s 2s 3 Se u (t ) e 2t Y ( s) U(s) 1 s2 4 4 ( s 2 2s 3)(s 2) ( s 1)(s 3)(s 2) 4 a b c ( s 1)(s 3)(s 2) ( s 1) ( s 3) ( s 2) 1 t 4 2 t 3 t y( t ) e e e 3 3 Modelagem de Sistemas Dinâmicos Estabilidade Estabilidade Y(s) b0s m b1s m1 ... b m1s b m N(s) R (s) a 0s n a1s n 1 ... a n 1s a n D(s) sn a 0 a 2 sn 1 a1 a 3 sn 2 b1 b2 sn 3 c1 c2 sn 4 d1 d 2 : : : s2 e1 e2 s1 f1 s0 g1 a4 a5 a 6 ... a 7 ... b3 b4 c3 c4 d3 d4 ... ... a1a 4 a 0a 5 a1 b3 a1a 6 a 0a 7 a1 b a a b c1 1 3 1 2 b1 b a a b c2 1 5 1 3 b1 c3 b1a 7 a1b 4 b1 c b b c d1 1 2 1 2 c1 d2 b1 a1a 2 a 0 a 3 a1 b2 c1b 3 b1c3 c1 O número de raízes da equação característica com partes reais positivas é igual ao número de mudanças de sinal dos coeficientes da 1ª coluna da tabela. Referências Bibliográficas [1] Ogata, K., Engenharia de Controle Moderno, Ed. Prentice-Hall. [2] de Souza, J. A. M., Controle de Sistemas, notas de aula. [3] Dorf , Richard C. Modern control system. Addison-Wesley Publishing Company. [4] Kuo, Benjamim C.: Sistemas de controle moderno, Editora Prentice Hall do Brasil.
Baixar