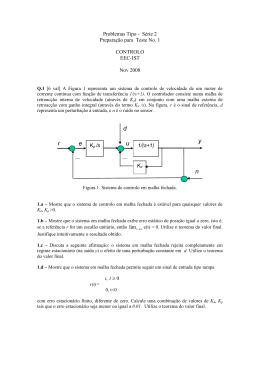
TESTE No. 1 TIPO CONTROLO MEEC Novembro 2015 Duração: 2 horas Q.1 [7v] Modelação, Linearização, Estabilidade O veículo representando na figura 1 é um “balão de ar quente”. Na análise que se segue ignoramos o movimento na vertical (ou seja, assume-se a existência de um mecanismo que mantém a altitude h em relação ao solo constante). O veículo desloca-se na horizontal sob a acção de um propulsor a hélice lateral. . Fig.1 Balão de ar quente com sistema de propulsão lateral O balão tem massa m igual a 1Kg e movimenta-se sob o efeito da força F gerada pelo propulsor a hélice. Pretende-se controlar a variável Vi (velocidade do balão em relação ao solo) em torno de um valor desejado arbitrário V io > 0 . Note que na presença de vento Vi(t)=V+Vw, onde Vw é a velocidade do vento em relação ao solo (o balão ou é arrastado por ou tem que “vencer” o vento). A força F é dada por F (t ) = k 0 n 2 (t ), k 0 = 0.5 ; para n > 0, (1) onde n denota a velocidade de rotação do hélice (em rad/s). No seu movimento horizontal, o veículo fica sujeito à força aerodinâmica Fa (t ) = −k1 (h )V 2 (t ) (2) onde V(t) é a velocidade horizontal em relação ao ar, isto é, a dinâmica depende só da velocidade em relação ao ar. Note que o coeficiente de arrasto k1= k1(h) depende da altitude em relação ao solo (devido à variação da densidade do ar). Q1.1 [3v] Suponha que não existe vento, ou seja, Vi=V. Considere o veículo a deslocar-se na horizontal à velocidade constante de equilíbrio determinada por V (t ) = V o = 1ms −1 , a uma altitude para a qual k1= 0.5 Nm2s-2. Calcule o valor de equilíbrio F0 correspondente para a força F(t). Seja P1 : F → V o sistema com entrada F e saída V. Mostre que o modelo linearizado de P1 em torno do ponto de equilíbrio definido por Vo e F0 tem a função de transferência P1 ( s ) = ΔV ( s ) 1 = , ΔF ( s ) ( s +1) (3) onde ΔV(s) e ΔF(s) denotam respectivamente as transformadas de Laplace de δV(t)=V(t)V0 e δF(t)=F(t)-F0. Q1.2 [1v] Calcule agora, a partir do valor de F0, o valor de equilíbrio n0 para a velocidade de rotação do hélice n. Prove justificadamente que o modelo do sistema P2 : n → T (descrito pela Eq. 1) linearizado em torno do ponto de operação especificado por Τ0 , n0 é dado por ΔF ( s ) =1 ΔN ( s ) onde ΔF(s) e ΔN(s) denotam respectivamente as transformadas de Laplace de δF(t)=F(t)F0 e δn(t)= n(t)- n0 . P2 ( s ) = Q1.3 [2v] Considere o sistema total linearizado P( s) = P1 ( s) P2 ( s) com função de transferência P (s ) = ΔV ( s ) 1 = ΔΝ( s ) ( s +1) que se obtém a partir da ligação em série dos sistemas considerados em Q1.1 e Q1.2. Pretende-se projectar um controlador em malha fechada para o sistema P (s ) . Começamos por considerar um simples controlador proporcional, tal como se especifica a seguir. Figura 2. Sistema de controlo em malha fechada: ganho proporcional Considere o sistema de controlo em malha fechada representado na Figura 2, onde r é o sinal de referência (valor desejado para V). O controlador, dado por K(s)=KP >0, é um simples ganho. Mostre que o sistema em malha fechada é estável para qualquer valor de KP positivo. Q1.4 [1v] Suponha agora que o balão aumentou a altitude h de operação e que k1= 0.1 Nm2s-2 (ou seja, baixou o coeficiente de arrasto aerodinâmico). No entanto, mantém-se a velocidade de equiliíbrio em relação ao ar. Diga justificadamente se o sistema de controlo de Q1.3 continua estável. Q2. [6v] Diagramas de Blocos, Estabilidade e Erros de Seguimento Considere ainda o sistema de controlo da Fig. 2. Q2.1 [2v] Mostre que o sistema de controlo em malha fechada não permite o seguimento preciso de sinais constantes r à entrada, ou seja, o erro de seguimento a uma entrada constante (erro de posição) é diferente de zero. Dê uma explicação intuitiva para a sua resposta. A fim de ultrapassar a dificuldade apontada em Q2.1, propõe-se agora o sistema de controlo da Fig. 3 com acção integral. Considere agora que o vento tem velocidade VW não nula, e que medida de VI é corrompida com ruído no sensor z. Nota importante: pelo princípio da sobreposição, o efeito de cada sinal externo pode ser estudado de modo independente (ou seja, fazendo os outros sinais iguais a 0). Q2.2 [1v] Mostre que o sistema em malha fechada é estável para qualquer valores de kI positivo e que o erro de posição é 0. Figura 3. Sistema de controlo em malha fechada: ganho integral Q2.3 [2v] Mostre que com o novo controlador o sistema em malha fechada rejeita completamente à saída qualquer sinal Vw constante no tempo, ou seja, o sistema de controlo permite o controlo preciso de velocidade em relação ao solo qualquer que seja a intensidade do vento (dentro dos limites óbvios de operacionalidade). Q2.4 [1v] Suponha que o sensor da velocidade em relação ao solo está descalibrado e tem uma polarização constante, isto é, z=z0=cte. Mostre que isto implica um erro constante na variável VI. Q.3 [7v] Estabilidade e “Root Locus” Um pequeno veículo espacial com massa m= 1kg desloca-se sem atrito ao longo da coordenada x, sob a acção de uma força F. Nestas condições, X (s ) 1 = F (s ) s 2 Pretende-se projector um sistema para o controlo da posição x. Para melhor compreender o tipo de controlador a adoptar consideram-se 3 passos (ver Fig. 4, onde K(s) é o controlador) Figura 4. Sistema de controlo em malha fechada ganho integral Q.3.1 [2v] Considere que K(s)=k>0, ou seja, o controlador é um simples ganho. Prove, utilizando a técnica do traçado do “Root-Locus”, que o sistema em malha fechada é marginalmente estável e que portanto não tem utilidade prática. Justifique detalhadamente as porções do diagrama sobre o eixo real, as intersecções com o eixo imaginário, e as assímptotas. Respostas não justificadas não serão consideradas. Q.3.2. [2v] Considere agora K(s)=k(s+1); k>0, ou seja, o controlador tem acção proporc ional e derivativa. Prove, utilizando a técnica do traçado do “RootLocus”, que o sistema em malha fechada é estável. Justifique detalhadamente as porções do diagrama sobre o eixo real, as intersecções com o eixo imaginário, as assímptotas, e os pontos de raízes múltiplas. Q3.3 [2v] O controlador sugerido em Q3.2 não é causal. A fim de o tornar causal propõe-se agora o controlador K(s)=kp(s+1)/(s+p); k>0, p>0, com p a determinar. Faça p=10 rad s-1. Prove, utilizando a técnica do traçado do “Root-Locus”, que o sistema em malha fechada é estável. Justifique detalhadamente as porções do diagrama sobre o eixo real, as intersecções com o eixo imaginário, as assímptotas, e os pontos de raízes múltiplas. Q3.4 [1v] Compare os diagramas de “root-locus” obtidos em Q3.2 e Q3.3. Comente acerca do impacte da introdução do polo p=10 rad s-1 no desempenho do sistema de controlo em malha fechada.
Baixar