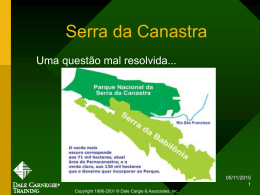
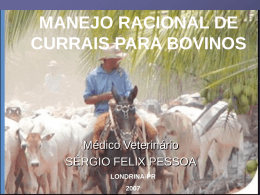
Manejo de nutrientes com base em mapas TERRA-GATOR Aplicação de calcário e fosfato natural DGPS http://www.terragator.agcocorp.com/ Manejo de nutrientes com base em mapas N-Sensor: Sensor de reflectância • A informação é adquirida 7 dias antes da aplicação de nitrogênio • Mapeamento da variabilidade espacial do verde e biomassa • Com as informações obtidas gera mapa de aplicação de nitrogênio. http://www.soyl.co.uk/nsensor/nsensor.htm Manejo de nutrientes com base em mapas SPAD: sensor de reflectância (estima a clorofila) http://www.ars.usda.gov/research/projects/ SCHEPERS • Utiliza parcela de referência com alto nível de N = 170200 kg por hectare Compara valor amostrado com valor de referência Manejo de nutrientes com base em mapas Mapa de produtividade a partir de leituras SPAD - Nitrogênio VARELLA alto médio baixo 10,00m 5,40m Área 1 - Coimbra 0,90m Leituras do SPAD 60 5,40m 55 y = 0.0077x + 19.033 R2 = 0.9708 50 45 40 35 2500 3000 3500 4000 4500 Produtividade (Kg.ha-1) 5000 5500 http://www.ufv.br/dea/provisagro/ Manejo de nutrientes com base em mapas Mapa de produtividade a partir de Imagens Aéreas Digitais Nitrogênio • Câmera multiespectral: vermelho, verde, azul e infravermelho próximo • Altura de vôo = 1000 m Mapa de produtividade média alta baixa -Fazenda Experimental de Coimbra - Universidade Federal de Viçosa - Tese Doutorado VARELLA Manejo de nutrientes em Tempo Real Nitrogênio Utiliza sensor de reflectância Resposta em tempo real http://fert.yara.co.uk/en/crop_fertilization/ Manejo de nutrientes em Tempo Real NITROGÊNIO Utiliza sensor de reflectância Resposta em tempo real Smart Sprayer - UIUC HERBICIDA Utiliza sensor de reflectância Resposta em tempo real Smart Sprayer - UIUC 1997 Localização da Câmera = Em frente da Barra do pulverizador =1m Barra com 3,05 m Uma câmera para duas linhas = 1,53 m Controladores = 6 válvulas solenóides Manejo de nutrientes em Tempo Real Câmera multiespectral Aplicação de Nitrogênio à taxa variável Visão artificial MegaPlus® CÂMERA DIGITAL MS3100 Multi-Spectral Camera (1392 x 1040) Estádio V12 Estádio V9 150 150 y = 0,9944x - 5,4 y = 0,8256x + 7,4667 2 100 R = 0,97 2 100 R = 0,78 50 50 0 0 0 50 100 150 0 50 N Aplicado N Aplicado Estádio V15 Estádio R1 150 2 R = 0,79 2 Tese Doutorado VARELLA – Projeto PRODETAB – Embrapa Milho e Sorgo 150 y = x - 0,0006 150 y = 0,9822x - 0,4333 R = 0,96 100 100 100 50 50 0 0 0 50 100 N Aplicado 150 0 50 100 N Aplicado 150 Sistemas de Aplicação Variável Manejo de pragas e doenças com informações georreferenciadas Sistemas de Aplicação Variável Manejo de pragas e doenças com imagens de sensoriamento remoto Acompanhamento da doença “blackleg” em campo de batata Califórnia Uma semana depois CONSIDERAÇÕES FINAIS • A agricultura de precisão veio para ficar – Automação das máquinas agrícolas – Necessidade de redução de custos – Preocupação com meio-ambiente • Necessidade de desenvolvimento de técnicas de manejo para essa nova tecnologia • Abre-se um grande mercado para prestação de serviço de assessoria/consultoria na área agrícola. FIM
Baixar