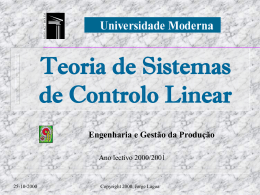
Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear Resolução do Exame de 1ª época Ano lectivo 2000/2001 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear I 1. Mostre que se pode aplicar o princípio de sobreposição ao sistema representado pelo diagrama de blocos seguinte. X2=t2 X3= 2t + X1=2t2 _ d 2 x3 x2 x1 dt + x2 x1 d dt 2 + d x2 x1 x3 d x2 x1 dt dt y d dt d d 2 x3 x2 x1 dt dt d d d 2 d d d 2 2 2 x x x 2 2 t t 2 t 2 2 t t 3 2 1 dt dt dt dt dt dt d d d d 22t 2t 22t 2t 2 0 0 0 dt dt dt dt y 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear X2=t2 X3= 2t + X1=2t2 _ + d dt 2 + d dt d d d d d d 2 8t 8 2 x 2 2 t 2 4 t 1 dt dt dt dt dt dt d d d d d d y2 2 x2 2 t 2 2 2t 4t 4 dt dt dt dt dt dt d d d y3 2 x3 2 2t 4t 4 dt dt dt y y1 y2 y3 8 4 4 0 y1 18-02-2001 Copyright 2001, Jorge Lagoa y Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear 2. Desenhe um diagrama de blocos do sistema de controlo de abertura automática de uma porta através de infravermelhos. Sensor de presença de pessoa + motor de abertura/fecho da porta comando do motor - sensor de posição da porta 18-02-2001 Copyright 2001, Jorge Lagoa y Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear II O sistema rotativo mecânico da figura seguinte, apresenta a seguinte equação diferencial: d 2 d T J 2 b k dt dt k b J T Onde T é a entrada e a saída do sistema. Suponha que o momento de inércia é de J=2 kg.m2/rad, a constante da mola de retenção é k=3 N.m/rad e o coeficiente de atrito dos apoios b=7N.s.m/rad. 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear a) Determine a função de transferência do sistema. Considere o sistema inicialmente em repouso. d 2 d T J 2 b k dt dt T J b k T 2 7 3 Aplicando a transformada de Laplace: T s 2s 2s 7ss 3s T s 2s 2 7s 3 s s 1 F s 2 T s 2 s 7 s 3 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear b) Sabendo que o sistema é posto em movimento por um momento de torção em rampa, determine a resposta em termos temporais. Como a entrada é uma rampa: s F s .T s s T t t T s 1 s2 1 1 1 1 2s 2 7 s 3 s 2 s 2 2s 2 7 s 3 s 2 s 3s 12 a1 a b b 2 1 112 12 s 3 s 2 s s 1 1 a1 F s . s 3s 3 2 0,044 2 1 1 s s 2 s 3 3 3 2 1 1 a2 F s .s 12 s 1 2 1,6 2 1 1 2 s s 3 s 1 2 2 3 2 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear d 1 4s 7 7 d 2 b11 F s .s 2 2 9 ds s 0 ds 2s 7 s 3 s 0 2s 2 7 s 3 s 0 b12 F s .s 2 s 0 1 1 2 2s 7 s 3 s 0 3 s 0,044 1,6 7 1 s 3 s 12 9s 2 3s Aplicando a transformada de Laplace inversa: t 0,044e 18-02-2001 3t 7t 1 1,6e 9 3 2t Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear III Dada a função de transferência em anel aberto: G s 30 s s 9 a) Determine a função de transferência em malha fechado, considerando que a realimentação é unitária negativa. 30 G s 30 30 s s 9 F s 2 1 G s 1 30 ss 9 30 s 9s 30 s s 9 Ou através de: G s 18-02-2001 N s N s 30 30 F s 2 D s Ds N s ss 9 30 s 9s 30 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear b) Determine os valores da frequência natural de vibração, da frequência natural de amortecimento, o coeficiente de amortecimento e o ganho do sistema quando a função de transferência toma a forma de um sistema de segunda forma. Classifique o sistema. wn2 30 wn 5,477 Hz 2wn 9 wn 3 3 3 0,822 wn 5,477 wd wn 1 2 5 1 0,822 2 3,098 Hz ganho 1 sistema sub - amortecido 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear c) Determine o tempo de crescimento, o tempo de pico, o máximo sobreimpulso e o tempo de estabelecimento da resposta (critério de 2%) a um degrau unitário do sistema controlado. arc sen 1 2 arcsen 1 0,822 2 0,193 tr 0,952 s wd 3,098 3,098 ts 1,014 s wd 3,098 Mp e ts 18-02-2001 12 e 0,822 10 , 8 2 22 3,483 4 4 0,888 s wn 0,822 5,477 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear IV Considere o sistema mostrado no diagrama de blocos da figura. G3 + x + + G1 _ _ H1 H2 18-02-2001 Copyright 2001, Jorge Lagoa G2 + y Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear a) Obtenha o grafo de fluxo correspondente. G3 x 1 x y G1 G2 y -H1 -H2 18-02-2001 1 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear x b) Determine a função de transferência 2 , em malha fechada, usando a fórmula de F ganho de Mason. P1 G1G2 P2 G1G3 1 1 2 1 L11 G1H1 L12 G1G2 H 2 L13 G1G3 H 2 1 L11 L12 L13 1 G1 H1 G1G2 H 2 G1G3 H 2 1 G1 H1 G1G2 H 2 G1G3 H 2 1 G1 H1 H 2 G2 G3 G1 G2 G3 x2 P1 1 P2 2 F 1 G1 H1 H 2 G2 G3 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear V A função de transferência de um sistema é dada por: K G( s) s 2 3 j s 2 3 j Considere que foi adicionada uma realimentação negativa com um sensor cuja função de transferência é dada por: s3 G (s) s5 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear a) Determine a função de transferência em malha aberta. G ( s ) H s K s3 K s 3 s 2 3 j s 2 3 j s 5 s 5s 2 3 j s 2 3 j b) Determine a função de transferência em malha fechada. K G ( s) s 2 3 j s 2 3 j F s K s 3 1 G ( s ) H s 1 s 5s 2 3 j s 2 3 j K s 5 s 5s 2 3 j s 2 3 j K s 3 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear c) Determine o limite de K para o qual o sistema em anel fechado é estável, utilizando o critério de Routh. Sendo o denominador (equação característica) da função de transferência em anel fechado: s 5s 2 3 j s 2 3 j K s 3 0 s 3 9s 2 33s 65 Ks 3K 0 s 3 9s 2 33 K s 65 3K 0 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear a1 s3 1 33 K 0 s2 s1 9 65 3K a1 a2 0 0 s0 b1 65 3K 933 K 232 6 K 9 a1 65 3K 0 b1 65 3K a1 18-02-2001 0 9 Copyright 2001, Jorge Lagoa a2 0 Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear 232 6 K 0 9 232 6K 0 6K 232 232 K 6 K 38,7 65 3K 0 3K 65 65 K 3 K 21,7 21,7 K 38,7 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear d) Seguindo os procedimentos (L.G.R.) para K>0. G ( s ) H s 1 3 4 18-02-2001 esboce o gráfico do Lugar Geométrico das Raízes K s 3 s 5s 2 3 j s 2 3 j Número de ramos, zeros e pólos nº de zeros m=1 (s=-3) nº de pólos n=3 (s=-5; s=-2+3j; s=-2-3j) n>m n=3 ramos Número de ramos para infinito nº de ramos para infinito n-m=3-1=2 Assimptotas dos ramos para infinito l=0 180 90 2 l=1 3 180 270 2 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear 5 Origem das assimptotas 6 5 2 2 3 6 3 2 2 Pontos de convergência/divergência K s 5s 2 3 j s 2 3 j s 3 9s 2 33s 65 ws Gs H s s3 s3 dws 0 ds s 0,845s 4,077 1,866 j s 4,077 1,866 j 0 Não há pontos de convergência ou divergência para k 0 . Existe, no entanto um ponto para k 0 em -0,845. 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear 7 Ângulos de partida dos ramos de cada um dos pólos complexos 3 tan 1 71,6 1 tan 1 3 45 3 90 1 180 45 90 71,6 116,6 2 180 315 270 288,4 116,6 243,4 18-02-2001 Copyright 2001, Jorge Lagoa Engenharia e Gestão da Produção Teoria de Sistemas de Controlo Linear 10 8 6 Imag Axis 4 2 0 -2 -4 -6 -8 -10 -10 18-02-2001 -5 0 Real Axis Copyright 2001, Jorge Lagoa 5 10
Baixar