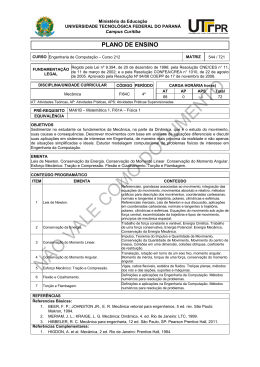
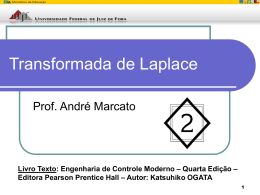
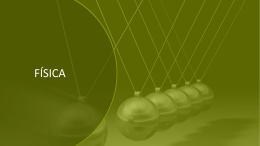
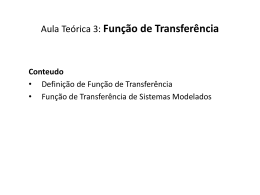
Modelagem Matemática MODELOS MATEMÁTICOS DE CIRCUITOS ELÉTRICOS Os circuitos equivalentes às redes elétricas com as quais trabalhamos consistem basicamente em três componentes lineares passivos: resistores, capacitores e indutores. A Tabela 1 resume os componentes e as relações entre tensão e corrente e entre tensão e carga, sob condições iniciais nulas. Tabela 1 – Relações tensão-corrente, tensão-carga e impedância para capacitoers, resistores e indutores. Componente Tensão-corrente Corrente-tensão Tensão-carga Impedância Admitância Z(s) = V(s)/I(s) Y(s) = I(s)/V(s) Nota: ν( t ) = V (volts), i( t ) = A (ampères), q( t ) = Q (coulombs), C = F (farads), R = Ω (ohms), G =(mhos), L = H (henries) As equações de um circuito elétrico obedecem às leis de Kirchhoff, que estabelecem: • A soma algébrica das diferenças de potencial ao logo de um circuito fechado é igual a zero. • A soma algébrica das correntes em uma junção ou nó é igual a zero. A partir destas relações podemos escrever as equações diferenciais do circuito. Aplica-se, então, a Transformada de Laplace das equações e finalmente se soluciona a Função de Transferência. Exemplo: Obter a função de transferência relacionando a tensão, VC(s), no capacitor à tensão de entrada, V(s), da figura 1. Figura 1 - Circuito RLC. Transformadas de Laplace Resolução: Utilizando as leis de Kirchhoff, obteremos a equação diferencial para o circuito. Somando as tensões ao longo da malha, supondo condições iniciais nulas, resulta a equação íntegro-diferencial. t di(t ) 1 L i(τ )dτ = v(t ) + Ri(t ) + dt C 0 ∫ Fazendo uma mudança de variável, de corrente para carga, usando a relação i(t ) = dq(t ) / dt resulta: L d 2 q(t ) dq(t ) 1 +R + q(t ) = v(t ) 2 dt C dt A partir da relação tensão-carga em um capacitor da Tabela 1: q(t ) = CvC (t ) Substituindo: LC d 2 vC (t ) dt 2 + RC dvC (t ) + vC (t ) = v(t ) dt Aplicando Laplace: ( LCs 2 ) + RCs + 1 VC (s) = V (s) Calculando a função de transferência, Vc (s) / V (s) : Vc (s) = V ( s) 1 LC 1 R s + s+ L LC 2 Modelos Dinâmicos Prof. Josemar dos Santos 21 Transformadas de Laplace SISTEMAS MECÂNICOS EM TRANSLAÇÃO Os sistemas mecânicos obdecem à lei fundamental onde o somatório de todas as forças é igual a zero. Isto é conhecido como lei de Newton e pode ser dito da seguinte forma: a soma das forças aplicadas deve ser igual à soma das forças de reação. Iniciaremos arbitrando um sentido positivo para o movimento, por exemplo, para direita. Usando o sentido escolhido como positivo para o movimento, desenhamos em primeiro lugar um diagrama de corpo livre, posicionando sobre o corpo todas as forças que agem sobre ele no sentido do movimento ou no sentido oposto. Em seguida, utilizamos a lei de Newton para construir a equação diferencial do movimento somando as forças e igualando a soma a zero. Finalmente, supondo as condições iniciais nulas, aplicamos a transformada de Laplace à equação diferencial, sepramos as variáveis e chegamos à função de transferência. A Tabela 2 apresenta os elementos mecânicos comuns em sistemas de translação como suas relações. Tabela 2 – Relações força-velocidade, força-deslocamento, e impedância de translação de molas, amortecedores e massas. Componente Forçavelocidade Forçadeslocamento Impedância Zm(s)=F(s)/X(s) Mola Amortecedor viscoso Massa Nota: Os seguintes conjuntos de símbolos e unidades são usadas ao longo deste texto: f ( t ) = N (newtons), x( t ) = m (metros), ν( t ) = m/s (metros/segundo), K =N/ m (newtons/metro), f ν = N.s/ m (newton-segundo/ metro), M =kg (quilogramas = newton.segundo2 / metro). Modelos Dinâmicos Prof. Josemar dos Santos 22 Transformadas de Laplace Exemplo Obter a função de transferência, X(s)/F(s), para o sistema da figura abaixo: Resolução: Desenhando o diagrama de corpo livre para o sistema proposto e arbitrando o sentido do movimento para direta, obtemos: Utilizando a Lei de Newton escrevemos a equação diferencial do movimento. M d 2 x(t ) dx(t ) + fv + Kx(t ) = f (t ) 2 dt dt Aplicando Laplace, Ms 2 X (s) + f v sX (s) + KX (s) = F (s) (Ms 2 + f v s + K ) X (s) = F (s) . Resolvendo para obter a função de transferência, G(s) = X ( s) 1 = F (s) Ms 2 + f v s + k Modelos Dinâmicos Prof. Josemar dos Santos 23 Transformadas de Laplace Em sistemas mecânicos, o número necessário de equações de movimento é igual ao número de movimentos linearmente independentes. A independência linear implica que um onto de movimento em um sistema em movimento pode continuar a se mover mesmo se todos os outros pontos forem mantidos parados. A expressão linearmente independente também é conhecida por graus de liberdade. Desta forma podemos sugerir uma pequana equação. [Soma de Impedâncias]X(s) = [Soma de forças aplicadas] Quando utilizando a lei de Newton, somando as forças de cada corpo e fazemos a soma igual a zero, o resultado é um sistema de equações simultâneas do movimento. Estas equações podem ser resolvidas em função da variável de saída de interesse a partir da qual se calcula a função de transferência. Exemplo: Obter a função de transferência, X2(s)/F(s), para o sistema da figura abaixo. Usando o conceito apresentado anteriormente podemos solucionar o exercício por inspeção, escrevendo as equações de movimento do sistema, sem desenhar o diagrama de corpo livre. ⎡ Soma das ⎤ ⎢ ⎥ ⎢ impedâncias ⎥ ⎢ conectadas ao ⎥ X 1(s) − ⎢ ⎥ ⎢ movimento ⎥ ⎢ ⎥ em x1 ⎣ ⎦ ⎡ Soma das ⎤ ⎢ ⎥ ⎢impedâncias ⎥ X (s) = ⎢ ⎥ 2 entre ⎢ ⎥ ⎢⎣ x1 e x 2 ⎥⎦ ⎡ Soma das ⎤ ⎢ ⎥ ⎢ forças aplicadas ⎥ ⎢⎣ ⎥⎦ em x1 e Modelos Dinâmicos Prof. Josemar dos Santos 24 Transformadas de Laplace ⎡ Soma das ⎤ ⎢ ⎥ ⎡ Soma das ⎤ ⎢ impedâncias ⎥ ⎢ ⎥ − ⎢impedâncias ⎥ X 1(s) − ⎢conectadas ao ⎥ X 2 (s) = ⎢ ⎥ ⎢⎣entre x1 e x 2 ⎥⎦ ⎢ movimento ⎥ ⎢ ⎥ em x 2 ⎣ ⎦ ⎡ Soma das ⎤ ⎢ ⎥ ⎢forças aplicadas ⎥ ⎢⎣ ⎥⎦ em x 2 SISTEMAS MECÂNICO EM ROTAÇÃO As equações caracterizando os sistemas que apresentam movimento de rotação são semelhantes às dos sitemas com translação. Escrever as equações de conjugado é equivalente a escrever as equações de força, com os termos de deslocamento, velocidade e aceleração considerada agora como grandezas angulares. O torque substitui a força e deslocamento angular substitui deslocamento. O termo associado à Massa é substituído por inércia. O conceito de graus de liberdade também continua válido nos sitemas em rotação. O número de pontos de movimento que podem ser submetidos a deslocamentos angulares, enquanto se mantêm parados todos os demais, é igual ao número de equações de movimento ncessário para descrever o sistema. Os elementos relacionados ao movimento mecânico em rotação são apresentados na Tabela 3. Tabela 3 – Relações torque-velocidade angular, torque-deslocamento angular, e impedância de rotação de molas, amortecedores viscosos e inércia. Componente Torque velocidade angular Torque deslocamento angular Impedância Zm(s) = T(s) / θ(s) Mola Amortecedor viscoso Inércia Nota: Os seguintes conjuntos de símbolos e unidades são usadas ao longo deste livro: T ( t ) = N.m (newton.metro), Θ( t ) = rad (radianos), ω( t ) = rad/s (radianos /segundo), K =N.m /rad (newton.metro / radiano), D ν = N.m.s/ rad (newton.metro.segundo/ radiano), J =kg.m2 (quilograma.metro2 = newton.metro.segundo2 / radiano). Modelos Dinâmicos Prof. Josemar dos Santos 25 Transformadas de Laplace Exemplo Obter a função de transferência, θ 2 (s) T (s) , para o sistema em rotação mostrado na figura abaixo. O eixo elástico é suspenso por meio de mancais em cada uma das extremidades e é submetido à torção. Um torque é aplicado à esquerda e o deslocamento angular é medido à direita. Resolução: Embora a torção ocorra ao longo do eixo, aproximamos o sistema admitindo que a torção atua como uma mola concentrada em um ponto particular do eixo, com uma inércia, J1, à esquerda, e uma inércia J2 à direita. Usando o princípio da superposição notamos que o sistema apresenta dois graus de liberdade. Desta forma podemos solucionar o problema por inspeção, onde: ⎡ Soma das Impedâncias ⎤ ⎡Soma das Impedâncias ⎤ ⎡Soma dos torques ⎤ ⎢ ⎥ ⎥ θ 2 ( s) = ⎢ ⎥ ⎢ conectas ao movimento ⎥ θ1(s) − ⎢ entre θ1 e θ 2 aplicados em θ1 ⎦ ⎣ ⎦ ⎣ ⎢⎣ ⎥ em θ1 ⎦ ⎡ Soma das Impedâncias ⎤ ⎡Soma dos torques ⎤ ⎡Soma das Impedâncias ⎤ ⎢ ⎥ −⎢ ⎥ ⎥ θ1(s) + ⎢ conectas ao movimento ⎥ θ 2 (s) = ⎢ entre θ1 e θ 2 aplicados em θ 2 ⎦ ⎣ ⎣ ⎦ ⎢⎣ ⎥⎦ em θ 2 Ou ainda utilizando o diagrama de corpo livre para cada um dos torques. Modelos Dinâmicos Prof. Josemar dos Santos 26 Transformadas de Laplace Sentido Sentido Sentido Sentido Sentido Sentido E assim obtemos as equações do movimento: ( J1s 2 + D1s + K )θ1(s) − Kθ 2 (s) = T (s) − Kθ1(s) + ( J 2 s 2 + D2 s + K )θ 2 (s) = 0 A partir das quais se obtém a função de transferência pedida: θ 2 (s) T (s) Δ= = K Δ ( J1s 2 + D1s + K −K 2 ( J 2 s + D2 s + K ) −K Modelos Dinâmicos Prof. Josemar dos Santos 27
Baixar