5 – Transformadas de Laplace
J. A. M. Felippe de Souza
5 – Transformadas de
Laplace
5.1 – Introdução às Transformadas de Laplace
4
5.2 – Transformadas de Laplace – definição
5
5.2 – Transformadas de Laplace de sinais conhecidos
6
Sinal exponencial
6
Exemplo 5.1
7
Sinal impulso unitário uo(t)
7
Sinal degrau unitário u1(t)
8
Sinal rampa unitária u2(t)
9
Sinal semi-parabólico u3(t)
9
Os demais sinais singulares un(t)
10
Os sinais seno e co-seno
10
5.4 – Propriedades da Transformada de Laplace
11
Homogeneidade
11
Aditividade
11
Linearidade
11
Sinal transladado (“time shifting”)
11
-at
Sinal multiplicado por exponencial e
11
Derivadas
12
Integral
13
Mudança de escala do tempo (“time scaling”)
13
1
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Sinal multiplicado por t
14
Sinal multiplicado por 1/t
14
Convolução
14
5.5 – Teorema do Valor Inicial (TVI) e o Teorema do Valor Final (TVF)
15
Teorema do Valor Inicial (TVI)
15
Teorema do Valor Final (TVF)
15
Exemplo 5.2
15
Exemplo 5.3
16
Exemplo 5.4
16
Exemplo 5.5
17
Exemplo 5.6
17
5.6 – Alguns exemplos de Transformadas de Laplace
18
Exemplo 5.7
18
Exemplo 5.8
18
Exemplo 5.9
19
Exemplo 5.10
19
Exemplo 5.11
20
Exemplo 5.12
21
Exemplo 5.13
21
Exemplo 5.14
21
Exemplo 5.15
23
Exemplo 5.16
24
Exemplo 5.17
25
5.7 – Tabela da Transformada de Laplace de alguns sinais conhecidos
26
5.8 – A Transformada Inversa de Laplace
27
Caso 1 – Pólos reais e distintos
28
Caso 2 – Pólos complexos conjugados
28
Caso 1 – Pólos múltiplos (duplos, triplos, etc.)
28
2
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Exemplo 5.18
30
Exemplo 5.19
31
Exemplo 5.20
31
Exemplo 5.21
33
5.9 – Solução EDO usando Transformadas de Laplace
34
Exemplo 5.22
35
Exemplo 5.23
37
Exemplo 5.24
38
5.10 – A reposta impulsional h(t) e H(s)
39
Exemplo 5.25
40
Exemplo 5.26
42
Exemplo 5.27
43
3
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Transformadas de Laplace
5.1 – Introdução às Transformadas de Laplace
Neste capítulo estudaremos as Transformadas de Laplace. Elas apresentam uma representação de sinais no domínio da frequência em função de uma variável “s” que é
um complexo, s = σ + jω.
A Transformada de Laplace foi desenvolvida pelo matemático francês Pierre Simon
Laplace (1749-1827).
Fig. 5.1 – Pierre Simon Laplace (1749-1827), francês.
4
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
5.2 – Transformadas de Laplace – definição
Considere um sinal contínuo x(t)
x(t) ∈ C {conjunto dos números complexos}
ou seja, o sinal x(t) pode ter valores complexos, i.e., valores com parte real e com
parte imaginária.
A Transformada de Laplace deste sinal x(t), normalmente simbolizada por:
L { x(t) }
ou
X(s)
permite expressar o sinal x(t) como:
L xt Xs · xt dt
∞
eq. (5.1)
A eq. (5.1) acima é chamada de transformada unilateral pois é definida para sinais
x(t) onde
x(t) = 0
para t < 0
e é a definição de Transformada de Laplace adoptada aqui pois é esta a que tem
maior aplicação para sistemas dinâmicos.
Fig. 5.2 – Um sinal x(t) com valor nulo para t < 0 [i.e., x(t) = 0 para t < 0].
Além desta definição de Transformada de Laplace unilateral (para t ≥ 0) que adoptamos aqui, há também a Transformada de Laplace bilateral (definida para ∀t, ou seja:
t < 0 e t ≥ 0).
5
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
5.3 – Transformadas de Laplace de alguns sinais conhecidos
Sinal exponencial
Como primeiro exemplo vamos utilizar o sinal exponencial
xt · u t
eq. (5.2)
Para um dado valor de a este sinal xt da eq. (5.2) está bem definido e assume o
valor 0 (“zero”) à esquerda da origem pois está multiplicado pelo degrau unitário
u1(t). Entretanto muitas vezes apenas escrevemos xt , t 0 e já fica subentendido que é nulo para t < 0.
O sinal x(t) dado pela eq. (5.2) assume diferentes formas dependendo do valor de a.
Se a > 0, x(t) é um sinal exponencial decrescente; se a < 0, x(t) é um sinal exponencial crescente; se a = 0; x(t) é um sinal degrau unitário.
Os gráficos destes sinais podem ser vistos nas figuras 5.3 e 5.4.
xt · u t, a 0
xt · u t, a 0
-at
Fig. 5.3 – Os sinais x(t) = e ⋅u1(t), para a > 0, exponencial decrescente (à esquerda),
e para a < 0, exponencial crescente (à direita).
xt · u t, a 0
-at
Fig. 5.4 – O sinal x(t) = e ⋅u1(t), a = 0 (degrau unitário).
6
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Calculando a Transformada de Laplace de x(t), pela definição [eq. (5.1)], temos que:
L xt Xs · e dt
∞
#
1 #
1
· dt " s ! a s!a
ou seja, Transformada de Laplace de um sinal exponencial é dada por:
L 1
s ! a
eq. (5.3)
Exemplo 5.1:
Considere os sinais xt $,% , t 0 (decrescente) e yt $,% , t 0
(crescente). Logo, as Transformadas de Laplace destes sinais são:
Xs $,%
e
Ys $,%
Sinal impulso unitário
x(t) = uo(t)
Para o sinal impulso unitário, usando novamente a definição da Transformada de Laplace
[eq. (5.1)], temos:
L xt Xs · u( t dt
∞
e agora, usando eq. (3.10) para a convolução
acima de com o impulso unitário u( t,
L xt · 1
Fig. 5.5 – O sinal x(t) = uo(t),
(impulso unitário).
Logo, Transformada de Laplace do impulso unitário uo(t) é dada por:
L u( t 1
7
eq. (5.4)
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Sinal degrau unitário u1(t)
Embora já visto acima como caso particular do sinal xt , para t 0, vamos
considerar novamente, agora como um sinal da família dos sinais singulares:
x(t) = u1(t)
Fig. 5.6 – O sinal x(t) = u1(t), degrau unitário.
Novamente, pela definição da Transformada de Laplace [eq. (5.1)], temos que:
L xt Xs · u t dt
∞
#
1
"
s 1
s
Logo, Transformada de Laplace do degrau unitário u1(t) é dada por:
L u + 1
s
eq. (5.5)
De forma semelhante pode-se calcular a Transformada de Laplace de outros sinais
conhecidos como:
u, t, a rampa unitária,
e demais sinais singulares contínuos: u$ t, u- t, … , u. t, assim como também do
seno, do co-seno, etc.
sen ωt, cos ωt, · sen ωt, · cos ωt, etc.
8
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Sinal rampa unitária u, t
x(t) = u2(t)
Fig. 5.7 – O sinal x(t) = u2(t), rampa unitária.
e a Transformada de Laplace L xt Xs é dada por:
L u, t Sinal semi-parabólico u$ t
1
s,
eq. (5.6)
x(t) = u3(t)
Fig. 5.8 – O sinal x(t) = u3(t), sinal semi-parabólico.
A Transformada de Laplace L xt Xs é dada por:
L u$ t Xs 9
1
s$
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Os demais sinais singulares
Os resultados anteriores, para u( t, impulso, u t, degrau, u, t, rampa e u$ t,
semi-parábola podem facilmente serem generalizados para toda a família de sinais
singulares contínuos u. t, n 2 0 vistos no capítulo 3:
xt u. t, n 2 0
A Transformada de Laplace L xt Xs é dada por:
L u. + 1
s.
eq. (5.7)
Sinais seno e co-seno
x(t) = sen ωt ⋅ u1(t)
x(t) = cos ωt ⋅ u1(t)
Fig. 5.9 – Os sinais x(t) = sen ω t ⋅ u1(t) (à esquerda), e x(t) = cos ω t ⋅ u1(t) (à direita).
A Transformada de Laplace do seno é dada por:
L sen ωt ω
s , ! ω,
eq. (5.8)
e a Transformada de Laplace do co-seno é dada por:
L cos ωt 10
s
s , ! ω,
eq. (5.9)
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
5.4 – Propriedades da Transformada de Laplace
Muitas das propriedades que aqui mostramos são análogas às vistas anteriormente
para Série de Fourier (capítulo 5) e Transformadas de Fourier (capítulo 6).
Considere que x(t), x1(t) e x2(t) são sinais contínuos.
Homogeneidade:
L k xt k L xt
Aditividade:
L x t ! x, t L x t + L x, t
Linearidade:
Como já vimos em anteriormente, a linearidade é a propriedade da aditividade e da
homogeneidade juntas:
L 5 x t ! β x, t α L x t + β L x, t
Sinal transladado (“time shifting”):
L xt a u t a e-as L xt = e-as ⋅ X(s)
-at
Sinal multiplicado por exponencial e :
onde X(s) = L xt.
L xt Xs ! a
Estas duas últimas propriedades são duais uma da outra pois: enquanto uma diz que a
transformada do sinal transladado fica multiplicada por uma exponencial, a outra diz
que a transformada de um sinal multiplicado por uma exponencial é um sinal transladado.
11
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Derivadas:
L 7
dn
n xt=
dt
L<
8:
8:
L 7
8
8
xt9 s · Xs x0
eq. (5.10)
xt9 s , · Xs s · x0 x;0
eq. (5.10a)
M
sn Xs sn1 · x0 >
> s · x
., 0 x
. 0
eq. (5.10b)
Os termos x0, s · x0, x ? 0, etc nas fórmulas acima são chamados de “resíduos”.
Note que se x(t) tem condições iniciais nulas, isto é, se
x0 0, x;0 0, x;;0 0, > , etc.
então os resíduos são todos nulos e derivar (em t) equivale a multiplicar por s (no domínio s, da frequência, de Laplace). Isto é, neste caso:
L x;t s · Xs
L x;;t s , · Xs
eq. (5.11)
M
L Ax . tB s . · Xs
Na verdade os resíduos aparecem porque tomamos a Transformada de Laplace unilateral. No caso da Transformada de Laplace bilateral não há resíduos e as transformadas das derivadas têm o resultado das equações em eq. (5.11).
Entretanto, na Transformada de Laplace unilateral, que estamos considerando aqui,
somente no caso em que as condições iniciais são nulas é que isso ocorre, isto é,
somente no caso em que x0 0, x;0 0, x;;0 0, > é que as equações em
eq. (5.11) são válidas.
12
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Integral:
Xs
1
L < xt dt = ! · C xt · dt D
s
s
#
E
Aqui os resíduos são diferentes do caso da derivada. Entretanto, da mesma forma que
derivar (em t) equivale a multiplicar por s (no domínio da frequência), sob certas condições integrar (em t) equivale a dividir por s (no domínio da frequência). Ou seja, se
xt · dt F
#
E
0
Então a propriedade torna-se:
L < xt dt = 1
· Xs.
s
Mudança de escala do tempo (“time scaling”):
t
L <x G I= α · Xα s ,
α
α0
Se o eixo da variável “t” for encolhido (0 < α < 1), então a Transformada de Laplace
de x(t) ficará esticada (em s).
Se o eixo da variável “t” for esticado (α > 1) então a Transformada de Laplace de x(t)
ficará encolhida (em s).
Equivalentemente, esta propriedade pode ser escrita como
L xkt 1
· XJ KL,
k
13
k0
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Sinal multiplicado por t
L t · xt dXs
ds
Novamente aqui temos uma dualidade. Esta última propriedade e a propriedade da
derivada são duais uma da outra pois: enquanto uma diz que a transformada da derivada de x(t) é X(s) vezes s, a outra diz que a transformada de x(t) vezes t é a derivada
de X(s).
Sinal multiplicado por 1/t
∞
1
L < · xt= Xsds
t
Mais uma vez aqui temos uma dualidade. Esta última propriedade é dual da propriedade da integral pois, enquanto uma diz que a transformada da integral de x(t) é X(s)
dividido por s, a outra diz que a transformada de x(t) dividido por t é um integral de
X(s).
Convolução
L x1 t M x2 t X1 s · X2 s
eq. (5.12)
Portanto, a Transformada de Laplace da convolução de dois sinais x1(t) e x2(t) é o
produto das transformadas X1(s) e X2(s) destes dois sinais.
Recorde-se que a definição de convolução entre dois sinais x1(t) e x2(t) (capítulo 4,
secções 4.3 e 4.4):
x t M x, t x t τ · x, τ · dτ
x τx, t τdτ
eq. (5.13)
Ou seja, a Transformada de Laplace transforma esta conta complicada da eq. (5.13)
em uma simples multiplicação, eq. (5.12).
14
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
5.5 – Teorema do Valor Inicial (TVI) e Teorema do Valor Final (TVF)
Os teoremas do valor inicial (TVI) e do valor final (TVF) permitem que se descubra o
valor inicial x(0+) e o valor final x(∞) dos sinais x(t) cuja Transformada de Laplace
X(s) sejam conhecidas.
Teorema do Valor Inicial (TVI)
x0 P limU xt lim s · Xs
T#
T
eq. (5.14)
Teorema do Valor Final (TVF)
x∞ P lim xt lim s · Xs
T#
T
eq. (5.15)
Exemplo 5.2:
Considere o sinal exponencial decrescente xt · u t, a 0, cuja Transformada de Laplace é dada por:
1
Xs s ! a
Aplicando-se os teoremas TVI e TVF das equações eq. (5.14) e eq. (5.15) obtemos:
x0 lim s · Xs lim s ·
sT∞
e
sT∞
s
0
sT0 s ! a
x∞ lim s · Xs lim
sT0
que estão de acordo com o esperado pois
x0 1
1
1
s ! a
e
15
x∞ lim 0.
T#
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Exemplo 5.3:
Considere o sinal x(t) cuja Transformada de Laplace é dada por:
Xs 4s ! 1
s, ! 2s
Aplicando-se os teoremas TVI e TVF das equações eq. (5.14) e eq. (5.15) obtemos:
x0 lim s · Xs lim s ·
sT∞
sT∞
x∞ lim s · Xs lim s ·
sT0
ou seja,
sT0
x0 4
4s ! 1
4s ! 1
lim
4
ss ! 2 sT∞ s ! 2
4s ! 1
4s ! 1
1
lim
2
ss ! 2 sT0 s ! 2
x∞ 0,5
e
Exemplo 5.4:
Considere o sinal x(t) cuja Transformada de Laplace é dada por:
Xs 3
s, ! 2s
Aplicando-se os teoremas TVI e TVF das equações eq. (5.14) e eq. (5.15) obtemos:
x0 lim s · Xs lim s ·
sT∞
sT∞
x∞ lim s · Xs lim s ·
sT0
ou seja,
x0 0
sT0
3
3
lim
0
ss ! 2 sT∞ s ! 2
3
3
3
lim
2
ss ! 2 sT0 s ! 2
e
16
x∞ 1,5
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Exemplo 5.5:
Considere o sinal da rampa unitária xt u, t, cuja Transformada de Laplace é
dada pela eq. (5.6):
Xs 1
s,
Aplicando-se os teoremas TVI e TVF das equações eq. (5.14) e eq. (5.15) obtemos:
1
1
x0 lim s · Xs lim s · 2 lim
0
sT∞
sT∞
sT∞ s
s
1
1
x∞ lim s · Xs lim s · 2 lim
∞
sT0
sT0
sT0 s
s
que estão de acordo com o esperado pois
x0 u, 0 0 e
x∞ u, ∞ ∞
Exemplo 5.6:
Considere o sinal exponencial x(t) cuja Transformada de Laplace é dada por:
Xs 1
s, ! s ! 1
Aplicando-se os teoremas TVI e TVF das equações eq. (5.14) e eq. (5.15) obtemos:
x0 lim s · Xs lim s ·
T#
T#
x∞ lim s · Xs lim s ·
T
ou seja,
T
x0 0
1
s
lim
0
s, ! s ! 1 T# s, ! s ! 1
1
s
lim
0
s, ! s ! 1 T s, ! s ! 1
e
17
x∞ 0
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
5.6 – Alguns exemplos de Transformadas de Laplace
Exemplo 5.7:
Considere o sinal da figura 5.8.
x(t) = 2 uo(t – a)
A Transformada de Laplace deste sinal é
dada por:
-as
X(s) = 2 e .
Fig. 5.10 – O sinal x(t) = 2 uo(t–a).
O resultado acima é facilmente obtido aplicando-se as propriedades da homogeneidade e da translação (“time shifting”) visto
que L u t 1.
Exemplo 5.8:
Considere o sinal da figura 5.9. Escrevendo este sinal em termos de sinais singulares
obtemos:
2
x ( t ) = − u1 ( t − a )
3
E portanto a Transformada de Laplace é dada por:
2e −as
X(s) = −
3s
Fig. 5.11 – O sinal x(t) = (–2/3) u1(t – a).
18
O resultado é obtido facilmente ao
aplicar as propriedades da homogeneidade e da translação (“time shifting”) visto que L u t 1/[.
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Exemplo 5.9:
Considere o sinal x(t) da figura 5.10. Escrevendo este sinal em termos de sinais singulares obtemos:
x ( t ) = u 2 ( t ) − u 2 ( t − 1) − u1 ( t − 3)
E portanto a Transformada de Laplace é dada por:
1 e − s e −2s
X (s) = 2 − 2 −
s
s
s
O resultado é obtido facilmente visto que
L u t 1/[ , que L u, t 1/s ,
e aplicando-se as propriedades da aditividade e da translação (“time shifting”).
Fig. 5.12 – O sinal x(t)
Exemplo 5.10:
Já vimos na secção anterior que a Transformada de Laplace do degrau unitário u1(t) é
dada pela eq. (5.5):
L u t 1
s
Também vimos no capítulo 2 (Sinais Singulares) que a derivada do degrau u1(t) é o
impulso uo(t):
u o (t) =
du 1 ( t )
dt
e que u1(0-) = 0, ou seja a condição inicial para u1(t) é nula. Portanto, aplicando-se a
propriedade da derivada para as Transformada de Laplace temos que:
1
L u( t s · L u t u 0 s · 0 1
s
ou seja, L u( t 1, da eq. (5.4), como era de se esperar.
Semelhantemente, as Transformadas de Laplace de todos os sinais singulares
u. t, n 2 1 podem ser calculadas recursivamente e obtendo-se os já conhecidos resultados: L u t 1⁄s , L u, t 1⁄s , , > , L u. t 1⁄s . .
19
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
L u t s · L u, t u, 0 s ·
L u, t s · L u$ t u$ 0 s ·
]
1
1
0
s,
s
1
1
0
s$
s,
L u. t s · L u. t u. 0 s ·
s
1
0
.
1
s.
Exemplo 5.11:
Olhando no sentido inverso do exemplo anterior podemos calcular as Transformadas
de Laplace dos sinais singulares aplicando-se a propriedade da integral. Como
u n (t) = ∫
e como
então
t
−∞
u n−1 ( t ) dt , ∀ n
C u. t · dt D
#
E
0, ^n
L u. t L < u. t dt =
t
1
1
· L un1 t ! · C un1 t · dt D
s
s
∞
t0
1 1
·
! 0
s sn1
1
n
s
ou seja,
L u. t Da eq. (5.7), como era de se esperar.
20
1
s.
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Exemplo 5.12:
Considere o sinal x(t) da figura 5.13.
Escrevendo este sinal em termos de
sinais singulares obtemos:
x ( t ) = a ⋅ u 1 ( t + 2).
Nitidamente x(t) ≠ 0 para valores de
t < 0.
Fig. 5.13 – O sinal x(t) ) = a u1(t+2).
Portanto, este sinal não tem Transformada de Laplace unilateral conforme
definida na eq. (5.1).
Exemplo 5.13:
Considere o sinal x(t) da figura 5.14.
Este sinal em termos de sinais singulares tem
a expressão:
x ( t ) = a ⋅ u1 (2 − t )
Mas nitidamente aqui também x(t) ≠ 0 para
valores de t < 0.
Fig. 5.14 – O sinal x(t) = a u1(2 – t).
Portanto, aqui novamente, este sinal não possui Transformada de Laplace unilateral conforme definida na eq. (5.1).
Exemplo 5.14:
Considere o sinal exponencial x t · u t cuja Transformada de Laplace é
dada pela eq. (5.3):
L x t X s 1
s!1
Se o eixo t for esticado de 5 vezes (por uma mudança de escala), este sinal se torna
em x2(t), também exponencial:
21
J. A. M. Felippe de Souza
t
x, t x G I ., · u t
5
5 – Transformadas de Laplace
cuja Transformada de Laplace é dada por (usando a transformada da exponencial)
_
L x, t X, s L < % = 1
1
J[ ! L
5
Fig. 5.15 – Os sinais x t · u t e x, t ., · u t são de certa
forma o mesmo sinal escritos em escalas de tempo diferentes. Um
tem o eixo dos ‘t’ 5 vezes mas esticado que o outro.
Usando a propriedade da mudança de escala (“time scaling”) obtemos o mesmo X2(s)
obtido acima:
L x, t X , s 5 · X5 s
5
5[ ! 1
1
J[ !
22
1
L
5
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Exemplo 5.15:
Considere o sinal sinusoidal
xt sen ωt · u t
cuja Transformada de Laplace é dada por [usando a transformada do seno eq. (5.8)]
L xt Xs ω
s , ! ω,
eq. (5.16)
vamos calcular a Transformada de Laplace co-seno, isto é, do sinal y(t)
yt cos ωt · u t
usando apenas as propriedades da Transformada de Laplace. Primeiramente, como a
derivada do seno é o co-seno, ou melhor,
d
sen ωt ω · cos ωt
dt
então, usando a propriedade da derivada para Transformada de Laplace, eq. (5.10),
temos que:
L 7
8
8
xt9 ω · L cos ωt sen0
ω · L cos ωt
eq. (5.17)
Por outro lado, usando novamente a propriedade da derivada para Transformada de
Laplace, mas agora para a eq. (5.16), temos que:
d
ω
s
L < xt= s · ,
ω
·
dt
s ! ω,
s2 ! ω2
eq. (5.18)
e agora, comparando a eq. (5.17) com a eq. (5.18) concluímos que transformada do
co-seno é dada por:
L cos ωt L yt Ys s
s , ! ω,
que corresponde à eq. (5.9) que foi calculada pela definição de Transformada de
Laplace.
23
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Exemplo 5.16:
Os sinais cujas Transformadas de Laplace são mostrados na eq. (5.19) podem ser vistos como sinais singulares [ u1(t) = 1, u2(t)/2 = t, u3(t)/6 = t2, … , u3(t)/n! = tn ] multiplicados por exponencial ou, alternativamente, como o sinal exponencial multiplicado
por t, por t2, por t3, …
L 1
s ! a
L t · L t , · L t $ · ]
]
L t . · ]
1
s ! a,
2
s ! a$
6
s ! a-
eq. (5.19)
n!
s ! a.
As relações da eq. (5.19) podem ser demonstradas de duas formas diferentes:
i) aplicando-se a propriedade da multiplicação por exponencial para os sinais singulares un(t) (degrau, rampa, etc.) divididos por n! pois, como já visto
anteriormente na eq. (3.19),
t.
, t 0, n 0, 1, 2, 3, >
u. t n!
ou, alternativamente,
ii) aplicando-se recursivamente a propriedade do sinal multiplicado por t para o sinal
exponencial.
24
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Exemplo 5.17:
Sinais oscilatórios amortecidos do tipo seno ou co-seno multiplicados por exponenciais decrescentes são comuns em sistemas estáveis.
Considere o caso do seno amortecido:
xt · sen ωt · u t
Fig. 5.16 – O sinal oscilatório amortecido xt · senωt · u t.
Aplicando-se a propriedade do sinal multiplicado por exponencial facilmente obtêmse:
ω
Xs s ! a, ! ω,
Considere agora o caso do co-seno amortecido:
xt · cos ωt · u t
Aplicando-se novamente a propriedade do sinal multiplicado por exponencial facilmente obtêm-se:
X s s ! a
s ! a, ! ω,
25
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
5.7 – Tabela da Transformada de Laplace de alguns sinais conhecidos
X(s) = L { x(t) }
x(t)
Xs 1
x(t) = uo(t)
Xs x(t) = u1(t)
x(t) = u2(t)
x(t) = un(t)
x(t) = e
–at
–at
⋅ u1(t)
x(t) = t2⋅e
–at
⋅ u1(t)
x(t) = t3⋅e
–at
⋅ u1(t)
x(t) = tn⋅e
–at
⋅ u1(t)
x(t) = e
–at
1
s.
1
s$
1
s ! a
Xs 1
s ! a,
Xs 3!
s ! a-
Xs 2
s ! a$
n!
s ! a.
Xs ω
s , ! ω,
s
Xs ,
s ! ω,
x(t) = cos ωt ⋅ u1(t)
x(t) = e
Xs Xs x(t) = sen ωt ⋅ u1(t)
–at
1
s,
Xs ⋅ u1(t)
x(t) = t⋅e
Xs Xs x(t) = u3(t)
1
s
Xs ⋅sen ωt ⋅ u1(t)
Xs ⋅cos⋅ωt ⋅ u1(t)
26
ω
s ! a, ! ω,
s!a
s ! a, ! ω,
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
5.8 – Transformada Inversa de Laplace
Nesta secção vamos desenvolver as técnicas de encontrar o sinal x(t) cuja Transformada de Laplace X(s) é conhecida. Ou seja, vamos calcular a Transformada inversa
de Laplace de X(s).
L Xs xt
As Transformadas de Laplace dos principais sinais de interesse para sistemas lineares
invariantes no tempo (SLIT) vêm em forma de uma fracção racional, ou seja, uma
fracção do tipo:
b
c
onde p(s) e q(s) são polinómios.
eq. (5.20)
Conforme podemos observar na tabela da secção anterior, as Transformadas de
Laplace de muitos sinais vêm todas na forma eq. (5.20) onde p(s) e q(s) são polinómios menores, isto é, do primeiro ou segundo grau.
Note também que em muitos casos p(s), o polinómio do numerador, tem apenas o
termo independente (i.e., uma constante)
p(s) = 1,
p(s) = 2,
p(s) = 3!,
p(s) = n!,
ou
p(s) = ω.
Em outras situações p(s) é um polinómio do primeiro grau:
p(s) = s
p(s) = (s + a).
ou
Sinais mais complexos são a combinação linear de sinais que aparecem na tabela da
secção anterior e também apresentam transformadas do tipo eq. (5.20) e devem ser
desmembrados em fracções parciais menores para obtermos a transformada inversa.
Esse processo de desmembrar o X(s) na forma de fracção eq. (5.20) é chamada de
expansão em fracções parciais. Vamos apresentar, através de exemplos, três casos de
expansão em fracções parciais.
A fracção racional da eq. (5.20) é a função de transferência de um sistema; as raízes
do polinómio q(s) do denominador são chamadas de pólos. Os três casos que veremos
são: pólos reais e distintos, pólos complexos e pólos múltiplos. Os demais casos
serão apenas combinações destes 3 casos, como veremos nos exemplos da próxima
secção.
27
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Caso 1 – Pólos reais e distintos:
No caso de pólos reais e distintos
s = a,
s = b,
q(s) pode ser factorado em
]
qs s ! a · s ! b …
e a expansão em fracções parciais deve ser da seguinte forma:
b n
o
!
!
p
c …
eq. (5.21)
Caso 2 – Pólos complexos conjugados:
No caso de pólos complexos conjugados, então q(s) pode ser expresso como:
qs as , ! bs ! c …
com
Δ b, 4ac 0
e a expansão em fracções parciais deve ser da seguinte forma:
b
no
!
: pr
c
…
eq. (5.22)
Caso 3 – Pólos múltiplos (duplos, triplos, etc.):
No caso de pólos múltiplos (i.e., pólos duplos, triplos, etc.), então q(s) pode ser
expresso como:
qs s ! a$ …
e a expansão em fracções parciais deve ser da seguinte forma:
b
n
o
t
!
!
!
s : c
28
…
eq. (5.23)
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Uma vez escrita nas formas eq. (5.21), eq. (5.22) e eq. (5.23), ou combinações destas,
torna-se fácil achar a transformada inversa de Laplace fracção a fracção, com o uso
da propriedade da linearidade e da tabela da secção anterior.
Por exemplo, no caso da eq. (5.21):
L
L
<
<
A
= A · s ! a
B
= B · s ! b
]
No caso da eq. (5.22), ela pode ser reescrita como
As ! B
As
B
!
as , ! bs ! c
as , ! bs ! c
as , ! bs ! c
B
JωL · ω
As
!
s ! α, ! ω,
s ! α, ! ω,
e o cálculo das transformadas inversas
L
As
<
=
s ! α, ! ω,
e
L
C
B⁄ω
D
s ! α, ! ω,
não é difícil de ser feito dando como resultado sinais do tipo
e
xt A · w · cos ωt · u t
xt respectivamente.
B w
·
· sen ωt · u t
ω
29
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
]
No caso da eq. (5.23):
L
L
<
L
A
A , =
·t ·
s ! a$
2
<
B
= B · t · ,
s ! a
<
C
= C · s ! a
Exemplo 5.18:
Xs s!3
s ! 1s ! 2
eq. (5.24)
Este é um caso de pólos reais e distintos. Para achar a transformada inversa de
Laplace de X(s) fazemos a expansão em fracções parciais:
Xs A
B
!
s ! 1 s ! 2
A ! Bs ! 2A ! B
s ! 1s ! 2
e igualando o numerador A ! Bs ! 2A ! B com (s + 3), o numerador de X(s)
na eq. (5.24), temos que:
A!B1
2A ! B 3
cuja solução é dada por
A2
B 1
e portanto,
30
J. A. M. Felippe de Souza
xt L
<
2
= ! L
[ ! 1
2 _ , ,
Exemplo 5.19:
5 – Transformadas de Laplace
t0
<
1
=
[ ! 2
2s, ! 7s ! 7
Xs s ! 1s ! 2
Aqui observamos que grau denominador e do numerador são o mesmo. Então, dividindo-se facilmente obtemos que
Xs 2 !
mas
L
e
L
C
s ! 3
s ! 1s ! 2
2 2 · u t
s ! 3
D
s ! 1s ! 2
já foi calculado no exemplo anterior (Exemplo 5.18), logo:
xt 2 · u t ! 2 , ,
Exemplo 5.20:
Xs s!1
ss, ! s ! 1
t0
eq. (5.25)
Este é um caso de combinação de um pólo real distinto (s = 0) e um par de pólos
complexos. Para achar a transformada inversa de Laplace de X(s) fazemos a expansão em fracções parciais:
31
J. A. M. Felippe de Souza
Xs 5 – Transformadas de Laplace
A
Bs ! C
! ,
s
s !s!1
A ! Bs, ! A ! Cs ! A
ss , ! s ! 1
e igualando o numerador B ! As , ! C ! As ! A com (s + 1), o numerador de
X(s) em eq. (5.25), temos que:
A!B0
A!C1
A1
cuja solução é dada por
e portanto,
Xs logo
A1
z B 1
1
s
! ,
s
s !s!1
C0
1
s ! 1⁄2
1⁄2
!
,
,
s
s ! 1⁄2 ! 3⁄4
s ! 1⁄2 ! 3⁄4
}
1
G
I
[
!
1
|
2
xt L < = L |
!L
2
2
s
| G[ ! 1I ! ~√3
2
2
{
}
1 √3
·
|
√3 2
|
2
2
1
3
√
| G[ ! I ! ~
2
2
{
}
1
G
I
[
!
1
|
1
2
L < = L |
!
·L
2
2
s
3
√
| G[ ! 1I ! ~√3
2
2
{
}
√3
|
2
|
2
2
1
3
√
| G[ ! I ! ~
2
2
{
e usando a tabela da secção anterior facilmente encontramos:
32
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
xt 1 .% · cos
1 .%
√3
√3
t!
· sen
t,
2
2
√3
t0
1 .% · cos 0.866t 0.578 .% sen0.866t ,
Exemplo 5.21:
s, ! 2s ! 3
Xs s ! 1$
t0
eq. (5.26)
Este é um caso de um pólo múltiplo (s = 1, triplo neste caso). Para achar a transformada inversa de Laplace de X(s) fazemos a expansão em fracções parciais:
Xs A
B
C
!
!
s ! 1$ s ! 1, s ! 1
A ! Bs ! 1 ! Cs ! 1,
s ! 1$
A ! B ! C ! B ! 2Cs ! Cs ,
s ! 1$
e igualando o numerador A ! B ! C ! B ! 2Cs ! Cs , com o numerador de X(s)
em eq. (5.26) temos que:
!! 3
! 2 2
1
cuja solução é dada por
2
0
1
33
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
e portanto,
Xs cuja transformada inversa é:
2
0
1
!
!
[ ! 1$
[ ! 1,
[!1
2
1
!
[ ! 1$
[!1
xt L
1
2
<
= ! L
s ! 1$
1
+ , ! 1 _ , + 0
1
<
=
s!1
5.9 – Solução de equações diferenciais ordinárias (EDO) usando
Transformada Laplace
As Transformadas de Laplace são muito úteis na resolução de equações diferenciais
ordinárias (EDO) transformando-as em equações algébricas no domínio ‘s’ (também
chamado “domínio da frequência”) de fácil solução. O principal problema deixa de
ser as equações diferenciais e passa a ser a transformada inversa de Laplace.
As propriedades das derivadas para Transformada de Laplace [equações eq. (5.10) –
eq. (5.11)] são as mais importantes para a resolução de EDO.
EDO descrevem a dinâmica de sistemas contínuos onde x(t) é a entrada (“input”) e
y(t) é a saída (“output”).
Normalmente, a entrada x(t) é conhecida assim como as condições iniciais da saída
y(t), isto é,
y(0), y’[0], y’’[0], etc.
e deseja-se calcular a saída y(t), a solução da EDO.
O número de condições iniciais necessárias para resolver a EDO é a ordem da própria
equação de diferencial (que é a ordem do sistema). Logo, se for de 1ª ordem, precisase de y(0); se for de 2ª ordem, precisa-se de y(0) e y’(0), e assim por diante.
34
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Exemplo 5.22:
Considere a equação diferencial ordinária (EDO) com x(t) = u1(t) = degrau unitário e
condições iniciais nulas, isto é, y(0)=0 e y’(0)=0:
y’’ + 3y(t) = 2x(t)
eq. (5.27)
y(0)=0 e y’(0)=0
x(t) = u1(t) = degrau unitário
Fazendo-se a Transformada de Laplace dos termos da eq. (5.27) obtém-se:
ou seja,
e portanto,
s , Ys ! 3Ys 2 Xs
s , ! 3 Ys 2 Xs
Ys ,
: $
Xs
eq. (5.28)
e, como x(t) = u1(t) = degrau unitário, temos que X(s) = 1/s, logo:
s , ! 3 Ys 2
s
2
s s, ! 3
que é uma equação algébrica em ‘s’ e cuja solução é:
Ys Agora a solução y(t) desta EDO é encontrada fazendo-se a transformada inversa de
Laplace de Y(s).
yt L
1
Ys
Este é um caso de um pólo real (distinto) s = 0 e um par de pólos complexos, raízes
de s , ! 3 0.
Para achar a transformada inversa de Laplace de Y(s) fazemos a expansão em fracções parciais:
35
J. A. M. Felippe de Souza
Ys 5 – Transformadas de Laplace
A
Bs ! C
! ,
s
s !3
A ! Bs , ! Cs ! 3A
ss , ! 3
e igualando o numerador A ! Bs , ! Cs ! 3A com 2, o numerador de Y(s), temos
que
A!B0
C0
3A 2
A cuja solução é dada por
,
B C 0
e portanto,
Xs logo
$
2
3
2⁄3
2⁄3s
!
s
s, ! 3
2
s
2 1
G I· G I· ,
3 s
3 s ! 3
xt L
~ L
2
3
2 1
<G I · = L
3 s
1
< = L
s
Js2
2
s
<G I· ,
=
3 s ! 3
s
2
! √3 L
e usando a tabela da secção 5.7 a solução da EDO é encontrada:
yt 2
1 cos√3 t ,
3
36
t0
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Exemplo 5.23:
Considere a equação diferencial ordinária (EDO) homogénea (ou seja, x(t) = 0, caso
de sistemas livres, que não têm “input”) e condições iniciais: y(0) = 0 e y’(0) = 4.
y’’ + 5y’ + 9y(t) = x(t) = 0
eq. (5.29)
y(0) = 0 e y’(0) = 4; x(t) = 0
Fazendo-se a Transformada de Laplace da eq. (5.29) termo a termo obtém-se:
logo,
s , Ys s y0 y;0 ! 5sYs 5y0 ! 9Ys 0
s, Ys 4 ! 5sYs ! 9Ys 0
s, ! 5s ! 9 Ys 4
e portanto,
4
s, ! 5s ! 9
que é uma equação algébrica em ‘s’ e cuja solução é:
Ys Agora a solução y(t) desta EDO é encontrada fazendo-se a transformada inversa de
Laplace de Y(s).
yt L
1
Ys
Este é um caso de um par de pólos complexos, raízes de s , ! 5s ! 9 0.
Para achar a transformada inversa de Laplace de Y(s) fazemos a expansão em fracções parciais:
Ys logo
2,412 · 1,658
4
s ! 2,5, ! 2,75
s ! 2,5, ! 1,658,
yt L
C2,412 ·
2,412 · L
C
1,658
D
s ! 2,5, ! 1,658,
1,658
D
s ! 2,5, ! 1,658,
37
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
e usando a tabela da secção 5.7, a solução da EDO é encontrada:
yt 2,412 · ,,% · sen 1,658 t ,
t0
Exemplo 5.24:
Considere a equação diferencial ordinária (EDO) abaixo onde x(t) = u1(t) = degrau
unitário, e as condições iniciais são: y(0) = 1 e y’(0) = 0.
y’’ + y’ + y(t) = x(t)
eq. (5.29a)
y(0) = 1 e y’(0) = 0; x(t) = u1(t)
Fazendo-se a Transformada de Laplace da eq. (5.29a) termo a termo obtém-se:
logo,
e portanto,
s , Ys s y0 y;0 ! sYs y0 ! Ys Xs
s, Ys s ! sYs 1 ! Ys 1⁄s
s, ! s ! 1 Ys s!1
s
que é uma equação algébrica em ‘s’ e cuja solução é:
Y s s!1
ss , ! s ! 1
que é a mesma equação eq. (5.26) já vista anteriormente no Exemplo 5.20. A solução
y(t) desta EDO é a transformada inversa de Laplace de Y(s):
yt L
1
Ys
já foi calculada no Exemplo 5.20 e é dada em eq. (5.26), ou seja,
yt 1 .% · cos 0.866t 0.578 .% sen0.866t ,
38
t0
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
5.10 – A resposta impulsional h(t) e H(s)
Note que para acharmos a Transformada inversa de Y(s), na eq. (5.27), era necessário
conhecer x(t), ou melhor, X(s).
Equações de diferenciais como as das eq. (5.27) ou eq. (5.29) descrevem a dinâmica
de sistemas em que x(t) é a entrada, y(t) é a saída do sistema.
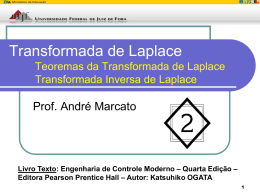
Fig. 5.17 – Diagrama de bloco esquemático de um
sistema com entrada x(t), saída y(t) e resposta impulsional h(t).
Conforme visto no capítulo 4 (Sistemas), a resposta impulsional (“impulse response”) h(t) será a resposta y(t) de um sistema linear e invariante no tempo (SLIT)
quando a entrada x(t) for um impulso uo(t), como ilustra a figura 5.18.
Fig. 5.18 – Diagrama de bloco esquemático da resposta
impulsional h(t), a saída do sistema quando a
entrada é o impulso uo(t).
Um resultado clássico da teoria de sistemas, que vimos na secção 4.3, é que a saída
y(t) de um sistema é a convolução entre h(t) e x(t), ou seja
y( t ) = h ( t ) * x ( t )
isto é, a saída de um sistema linear invariante no tempo (SLIT) toma a forma da integral de convolução, eq. (4.5):
y(t) =
+∞
∫
−∞
+∞
h(t − τ) ⋅ x(τ) ⋅ dτ = ∫ h(τ) ⋅ x(t − τ) ⋅ dτ .
−∞
Usando a propriedade da convolução para a Transformada de Laplace, eq. (5.12), ou
seja, a transformada da convolução é o produto das transformadas, temos então que:
Y ( s ) = H ( s ) ⋅ X (s )
39
eq. (5.30)
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
o que permite redesenhar o diagrama acima da Fig. 5.17 na forma mostrada na
Fig. 5.19.
Fig. 5.19 – Diagrama de bloco esquemático de um sistema com entrada X(s), saída Y(s) e resposta
impulsional H(s).
Como a Transformada de Laplace do impulso unitário uo(t) é igual a 1, ou seja:
L {uo(t)} = 1
conforme já visto, eq. (5.4), então quando a entrada x(t) é um impulso unitário uo(t),
i.e.,
x(t) = uo(t)
teremos que X(s) = 1 e portanto, pela eq. (5.30), Y(s) = H(s) × 1, isto é,
Y(s) = H(s),
o que implica
y(t) = h(t),
isto é, a saída y(t) se torna a resposta impulsional, como seria de se esperar.
Exemplo 5.25:
Retomando o sistema do Exemplo 5.22, se imaginarmos que a equação diferencial
eq. (5.27) descreve a dinâmica de um sistema, então, comparando a eq. (5.28) com a
eq. (5.30) obtemos
Hs 2
s , ! 3
Isto é consistente com a definição de h(t) e H(s) (resposta impulsional do sistema),
pois se a entrada x(t) for o degrau unitário, como era no Exemplo 5.22,
x(t) = u1(t)
então X(s) = 1/s e, pela eq. (5.30), temos que:
40
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Ys Hs ·
1
2
s
ss, ! 3
ou seja, o mesmo Y(s) que foi obtido no Exemplo 5.22 e que permitiu calcular a saída
do sistema y(t)
yt L 1 Ys
Fig. 5.20 – Sistema com entrada x(t), saída
y(t) e resposta impulsional h(t).
Entretanto, se a entrada do sistema fosse
x(t) = uo(t)
então X(s) = 1 e, pela eq. (5.30), temos que:
Ys Hs 2
s , ! 3
ou seja, a saída y(t) = h(t), conforme a própria definição da resposta impulsional h(t).
A expressão deste h(t) é então achada fazendo-se
ou seja,
ht L
ht yt L
<
Hs L
2
= L
s , ! 3
Ys
2
·
√3
,
√3 Js , ! √3 L
e agora, pela propriedade da homogeneidade da Transformada de Laplace e usandose a tabela da secção 5.7, temos que a resposta impulsional é:
ht yt 2
√3
41
sen√3t,
t0
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Observe que os pólos do sistema, raízes do polinómio q(s) do denominador de H(s),
ou seja:
qs s , ! 3,
s √3.
Exemplo 5.26:
No caso do Exemplo 5.23, a equação diferencial eq. (5.29), que descreve a dinâmica
deste sistema, é na verdade
y’’ + 5y’ + 9 y(t) = x(t)
eq. (5.31)
onde x(t) = 0 pois a entrada deste sistema é nula.
Agora, assumindo condições iniciais nulas, i.e., y(0) = 0 e y’(0) = 0, e fazendo a
Transformada de Laplace da equação eq. (5.31) termo a termo, facilmente obtém-se:
s2Y(s) + 5sY(s) + 9Y(s) = X(s)
o que nos fornece:
Y s 1
· Xs
s , ! 5s ! 9
que, novamente, comparando com a equação eq. (5.30) nos dá:
Hs a resposta impulsional do sistema.
1
s , ! 5s ! 9
Portanto, a resposta impulsional H(s) pode ser sempre obtida a partir da equação diferencial que descreve o sistema fazendo-se condições iniciais nulas. Além disso, os
pólos do sistema são as raízes do polinómio
qs s , ! 5s ! 9
que se encontra no denominador de H(s), que são:
s = – 2,5 ± 1,658 j
42
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Para se achar h(t) temos que calcular a Transformada inversa:
ht L
Reescrevendo q(s) como
1
Hs
qs s , ! 5s ! 9 s ! 2,52 ! 2,75
e substituindo no denominador de H(s), temos
Hs logo,
ht L
1
s ! 2,5, ! 2,75
0,603 · 1,658
s ! 2,5, ! 1,658,
C0,603 ·
0,603 · L
C
1,658
D
s ! 2,5, ! 1,658,
1,658
D
s ! 2,5, ! 1,658,
e usando a tabela da secção 5.7, nos dá:
ht 0,603 · ,,% · sen 1,658 t ,
t0
Fig. 5.21 – Sistema com entrada x(t), saída
y(t) e resposta impulsional h(t).
Exemplo 5.27:
No caso do Exemplo 5.24, a equação diferencial eq. (5.29a), que descreve a dinâmica
deste sistema, é
y’’ + y’ + y(t) = x(t)
43
eq. (5.32)
5 – Transformadas de Laplace
J. A. M. Felippe de Souza
Agora, assumindo condições iniciais nulas, i.e., y(0) = 0 e y’(0) = 0, e fazendo a
Transformada de Laplace da equação eq. (5.31) termo a termo, facilmente obtém-se:
s , Ys ! sYs ! Ys Xs
Ys o que nos fornece:
1
· Xs
s , ! s ! 1
que, novamente, comparando com a equação eq. (5.30) nos dá:
1
s , ! s ! 1
Hs a resposta impulsional do sistema.
Mais uma vez a resposta impulsional H(s) foi obtida a partir da EDO que descreve o
sistema fazendo-se condições iniciais nulas. Os pólos deste sistema são as raízes do
polinómio
qs s , ! s ! 1
que se encontra no denominador de H(s), que são:
s = – 0,5 ± 0,866 j
Para se achar h(t) temos que calcular a Transformada inversa:
Reescrevendo q(s) como
ht L
1
Hs
qs s , ! s ! 1 s ! 0,52 ! 0,8662
e substituindo no denominador de H(s), temos
logo,
Hs 1
s ! 0,5, ! 0,866,
ht 1,1547 · L
C
e usando a tabela da secção 5.7, nos dá:
0,866
D
s ! 0,5, ! 0,866,
ht 1,1547 · ,% · sen 0,866 t ,
44
t0
Baixar