107
4.4
Mais da geometria analı́tica de retas e planos
Equações da reta na forma simétrica
Lembremos que uma reta r, no planos casos acima, a forma simétrica é um caso particular da
equação na reta na forma geral ou no espaço, é determinada por um ponto A e um vetor ~v , não
nulo, sendo sua equação vetorial dada por r : X = A + λ~v , λ ∈ R.
O escalar λ échamado parâmetro da equação.
f : R −→
R2 ou R3
, que associa a cada λ real um ponto X = A + λ~v , é
A aplicação
λ 7−→ f (λ) = A + λ~v
chamada parametrização da reta r e evidencia o caráter dinâmico da trajetória retilı́lea percorrida
por um ponto X da reta, dependendo do parâmetro λ.
As equações paramétricas da reta que passa por A = (x0 , y0 , z0 ) e tem a direção de ~v = (a, b, c) 6=
(0, 0, 0) (no caso de R3 ) expressam a dependência das coordenadas de X = (x, y, z) da reta, em
relação ao parâmetro em questão:
x = x0 + λa
y = y0 + λb
z = z0 + c
λ∈R
Se a, b e c forem todos não nulos, então em cada uma das equações paramétricas podemos
isolar o parâmetro λ correspondente ao ponto (x, y, z):
y − y0
z − z0
x − x0
λ=
=
=
a
b
c
As expressões dentro do retângulo acima não contém λ e expressam as relações que existem
entre as coordenadas de X ∈ r, independente do parâmetro. São chamadas equações da reta r
na forma simétrica.
y − y0
z − z0
e fica claro que a
=
b
c
reta r está contida num plano paralelo ao plano yz dado por x = x0 .
Se a = 0, b 6= 0 e c 6= 0, ficamos com as equações x = x0 ,
Se a = 0 e b = 0 (neste caso, somente c 6= 0), ficamos com as equações x = x0 , y = y0 como
as equações na forma simétrica.
Faça como exercı́cio as análises dos outros casos: (i) somente b = 0, (ii) somente c = 0, (iii)
108
somente a 6= 0, (iv) somente b 6= 0.
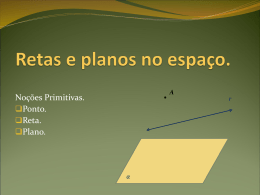
Nesta ilustração obtida no Maple, a reta foi
dada pela equação na forma simétrica
y−2
z−1
r : x = 2,
=
, e visualizada na
1
3
região
4
π1 :
x=2
3
2
1
0
r
–1
–2
–2
π2
0
–1
1
0
y
2
1
2
4
A reta r é a intersecção do plano π1 : x = 2,
x
paralelo ao plano yz,
z−1
y−2
=
.
com o plano π2 :
1
3
3
3
0 ≤ x ≤ 4,
(x, y, z) ∈ R3 | −2 ≤ y ≤ 4,
−2 ≤ z ≤ 4
4
2
Agora, consideremos o caso
em R : Sejam A = (x0 , y0 ), ~v = (a, b) 6= (0, 0) e a reta r(A, v) dada
x = x0 + ta
em equações paramétricas
, t ∈ R.
y = y + tb
0
y − y0
x − x0
, donde y − y0 =
=
b
b
b
b
(x − x0 ), que pode ser escrita na forma y = m(x − x0 ) + y0 , onde m = , ou ainda, y = mx + n,
a
a
onde n = −mx0 + y0 .
Considerando a 6= 0 e b 6= 0, temos a equação simétrica
m = tg θ, onde θ é o ângulo entre r e o eixo
r
y
•
positivo Ox.
A
n é a ordenada do ponto de intersecção da reta
n
~v
b
r como o eixo Oy. Temos a conhecida fórmula
da reta na forma y = mx + n , onde
θ
~ı
a
x
m é chamado coeficiente angular de r e
n é chamado coeficiente linear de r.
109
Quando a = 0, a equação da reta na forma simétrica será simplesmente x = x0 . Analogamente,
se b = 0, a equação na forma simétrica é y = y0 .
Em qualquer dos casos acima, a forma simétrica é um caso particular da equação na reta na
forma geral, da forma αx + βy + γ = 0, onde w
~ = (α, β) é o vetor normal á reta.
Posição relativa entre dois planos
A partir da equação geral de um plano no espaço, π : ax + by + cz + d = 0, onde ~n = (a, b, c) é o
vetor normal ao plano, o estudo das posições relativas entre dois planos se torna mais rico.
Consideremos os planos π1 : a1 x + b1 y + c1 z + d1 = 0 e π2 : a2 x + b2 y + c2 z + d2 = 0.
1.
O plano π1 é paralelo ao plano π2 se e somente se π1 ∩ π2 é vazio. Isto é, o sistema linear
a1 x + b1 y + c1 z + d1 = 0
é impossı́vel. Neste caso, posto(A)=1 e posto([A | B])=2.
a x + b y + c z + d = 0
2
2
2
2
Geometricamente, isto ocorre quando {~n1 = (a1 , b1 , c1 ), ~n2 = (a2 , b2 , c2 )} é l.d. e, portanto,
~n2 = k~n1 para um escalar k 6= 0, mas d2 6= kd1 .
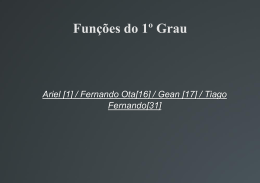
Nesta ilustração, os planos são π1 : y + z = 1
e π2 : 2x + 2z = 4.
π2
2
~n2
~n1 = (0, 1, 1) é paralelo a ~n1 = (0, 2, 2) com
~n2 = 2~n1 , mas 4 6= 2 × 1.
1.5
Logo não existe (x, y, z) satisfazendo as duas
π1
1
equações ao mesmo tempo.
0.5
~n1
0
0
0
0.5
1
y
1.5
1
x
2
2. π1 é coincidente
com π2 se todos os pontos de π1 também são pontos de π2 e vice-versa. Neste
a1 x + b1 y + c1 z + d1 = 0
caso, o sistema
é possı́vel e indeterminado, com posto(A)=1 e
a x + b y + c z + d = 0
2
2
2
2
posto([A | B])=1, e portanto, o grau de liberdade é 2, que é a dimensão de um plano.
Geometricamente, {~n1 , ~n2 } é l.d., ~n2 = k~n1 e além disso, d2 = kd1 .
110
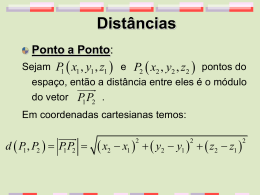
3. π1 intercepta π2 segundo uma reta.
Neste
caso {~n1 , ~n2 } é l.i. e o sistema
a1 x + b1 y + c1 z + d1 = 0
é possı́vel e
a x + b y + c z + d = 0
2
2
2
2
indeterminado, com grau de liberdade 1, ou
~n1
π1
seja, existe a escolha de um parâmetro
~v
•
P
~n2
escalar para descrever o conjunto de soluções,
e portanto esse conjunto é uma reta.
π1 ∩ π2 = r
π2
Já vimos que a equação vetorial (ou as paramétricas) da reta aparece naturalmente quando
aplicamos o método de eliminação de Gauss para resolver o sistema.
Aqui apresentamos uma outra maneira geometricamente interessante para o problema de
determinar r, que é observar que o vetor direção ~v 6= ~0 de r = π1 ∩ π2 deve ser ortogonal a
~n1 e a ~n2 simultaneamente. De fato, por ~v ser um vetor contido em π1 , segue que ~v ⊥ ~n1 e
por ~v ser um vetor de π2 , segue que ~v ⊥ ~n2 . Logo ~v e ~n1 × ~n2 são paralelos.
Assim, conhecido um ponto P , solução do sistema, a equação vetorial será conhecida: r :
X = P + t(~n1 × ~n2 ), t ∈ R.
Por exemplo, os planos da ilustração, π1 : 3x − z = 0 e π2 : −x + z = 0 têm o ponto
P = (0, 0, 0) na intersecção. Como ~n1 = (3, 0, −1) e ~n2 = (−1, 0, 1), temos que ~v k ~n1 × ~n2 =
(0, 2, 0). Podemos tomar ~v = (0, 1, 0. Então r : X = (0, 0, 0) + t(0, 1, 0), t ∈ R, ou seja, r
neste caso é o eixo Oy.
Posições relativas entre retas no espaço, com produto vetorial
As posições relativas entre retas no espaço também podem ser analisadas com o uso do produto
vetorial. Sejam r1 : X = A + λ~v1 , λ ∈ R e r2 : X = B + µ~v2 , µ ∈ R as duas retas.
111
1. Se ~v1 ×~v2 = ~0 temos que ~v1 e ~v2 são l.d., e portanto, as retas são paralelas ou coincidentes. Se
além disso, A ∈ r2 (ou B ∈ r1 ), então são coincidentes. É claro que se ~v1 e ~v2 são conhecidos
em coordenadas, é muito mais fácil ver se são l.d ou l.i. verificando se são múltiplos ou não.
−−
→
Quando as retas são paralelas, temos também que {~v1 , AB} é l.i. O plano determinado por
−
−
→
A, ~v1 e AB é o plano contendo ambas as retas.
2. Se ~v1 × ~v2 6= ~0 as retas têm direções l.i. e portanto, são concorrentes ou reversas. Se ainda
−−
→
−−
→
[~v1 , ~v2 , AB] = 0, então AB é coplanar com ~v1 e ~v2 , donde as retas são concorrentes. Caso
−−
→
contrário, {~v1 , ~v2 , AB} é l.i. e as retas são reversas.
Se as retas são concorrentes e r1 ∩ r2 = P , o plano X = P + λ~v1 + µ~v2 é o plano contendo as
retas. O vetor normal a esse plano é ~v1 × ~v2 .
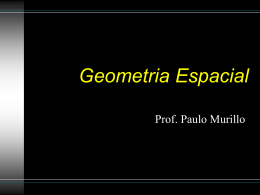
Se as retas são reversas, o plano
~v1 × ~v2
r1
π1 : X = A + t~v1 + s~v2 , t, s ∈ R, contendo r1
A
•
e paralelo a r2 , é paralelo ao plano
π2 : X = B + t~v1 + s~v2 , t, s ∈ R, contendo r2
e paralelo a r1 . Ambos os planos têm vetor
normal ~v1 × ~v2 . Observe que não existe
plano algum contendo as duas retas
π1
~v1
~v1 × ~v2
B
•
π2
~v2
r2
simultaneamente.
Exercı́cio 1: Encontrar a equação da reta perpendicular a duas retas reversas.
Exercı́cio 2: Encontrar a equação do plano que contém r1 e é ortogonal ao plano π2 .
Encontrar a intersecção deste plano com π2 . Qual é a posição relativa entre r1 e esta reta
intersecção?
Ângulo entre dois planos
Consideremos dois planos π1 : a1 x + b1 y + c1 z + d1 = 0 e π2 : a2 x + b2 y + c2 z + d2 = 0.
Os vetores ~n1 = (a1 , b1 , c1 ) e ~n2 = (a2 , b2 , c2 ) são respectivamente os vetores normais de π1 e
π2 .
112
Já vimos que se {~n1 , ~n2 } é l.d. os planos são paralelos ou coincidentes. Quando são coincidentes,
dizemos que o ângulo entre π1 e π2 é zero. Quando são paralelos, não definimos o ângulo entre π1
e π2 .
Consideremos então o caso em que {~n1 , ~n2 } é l.i. e portanto a intersecção π2 ∩ π2 é uma reta, e
tem sentido considerar os ângulos que se formam na intersecção, chamados ângulos diedrais, como
na figura.
Observemos que, por um ponto P fora dos
•P
planos, podemos traçar retas perpendiculares
aos planos π1 e π2 , que interceptam os planos
~n1
π1
~n2
Q•
nos pontos Q e R, respectivamente. Veja a
ilustração ao lado. Os pontos P , Q e R
•
S
determinam um plano que é ortogonal a π1 e π2
•R
π2
•
simultaneamente (um vetor normal deste plano
é ~n1 × ~n2 ) e que intercepta r = π1 ∩ π2 no
r
~n1 × ~n2
ponto S, formando um quadrilátero P QSR.
Neste quadrilátero, os ângulos em R e Q são retos por construção, e os ângulos em S e P são
suplementares e iguais aos ângulos diedrais que se formam entre os planos (confira na figura).
Definimos como ângulo entre os planos π1 e π2 , o menor dos suplementares, que é exatamente
o ângulo entre as retas normais, r1 (P, Q) e r2 (P, R).
π
|~n1 · ~n2 |
, sendo o ângulo entre 0 e radianos.
Logo, ∡(π1 , π2 ) = arccos
|~n1 ||~n2 |
2
Em particular, se ~n1 ⊥ ~n2 , temos que π1 ⊥ π2 .
Ângulo entre uma reta e um plano
Consideremos uma reta dada por r : X = A + t~v , t ∈ R, e um plano π : ax + by + cz + d = 0, com
vetor normal ~n = (a, b, c).
1. Se {~v , ~n} for l.d., então a reta r é perpendicular ao plano π, e portanto o ângulo entre r e π é
π
reto (90 graus ou radianos). (Obs: Não confundir a notação π utilizada ao nome do plano
2
113
e o número real π usada na medição de ângulos!)
2. {~v , ~n} for l.i, há três casos a considerar:
(a) ~v · ~n = 0, isto é, ~v ⊥ ~n, e A ∈
/ π. Neste caso, a reta r é paralela ao plano π já que a
direção de ~v é uma direção do plano. Nenhum ponto da reta pertence ao plano, isto é,
a intersecção r ∩ π é vazia. Neste caso, não há ângulo a considerar.
(b) ~v · ~n = 0, e A ∈ π. Como ~v é um vetor do plano, r estará inteiramente contida em π.
Neste caso, o ângulo entre a reta e o plano é zero.
(c) ~v · ~n 6= 0. Neste caso a reta r é transversal ao plano π, interceptando-o num único ponto
P.
Podemos considerar então um plano α
contendo a reta r e é perpendicular ao
plano π dado, gerado por {~v , ~n} e que
r
~n
passa pelo ponto P . A reta s de
α
~v
intersecção de α com o plano π é chamada
projeção ortogonal de r sobre o plano π.
•
P
O ângulo entre s e r em P é definido como
s
π
o ângulo entre a reta r e o plano π. Pela
própria construção, este ângulo é
complementar do ângulo agudo entre as
direções de ~v e de ~n.
Logo, ∡(r, π) =
π
|~v · ~n|
|~v · ~n|
− arccos
= arcsen
.
2
|~v ||~n|
|~v ||~n|
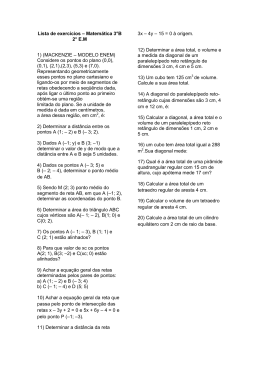
Distâncias
1. Distância entre ponto e plano.
A distância de um ponto P a um plano π é o comprimento do segmento P Q, com Q ∈ π e
−−→
P Q ⊥ π. O ponto Q é a intersecção da reta normal a π que passa por P , com o plano π.
114
P
•
P
•
~n
dist(P, π)
H
H
"•HH
" Q H
−→
P roj~nAP
(
(
π
π
A•
Também se pode obter a distância de P a π escolhendo qualquer ponto A ∈ π e projetanto
−→
ortogonalmente AP sobre a normal ~n do plano π e tomando o comprimento da projeção.
2. Distância entre reta e plano.
Se algum ponto da reta estiver também no
P
•
r
plano, a distância é zero.
Se a reta for paralela ao plano, a distância
~n
H
H
"•HH
" Q H
π
da reta ao plano é a distância de qualquer
um de seus pontos ao plano.
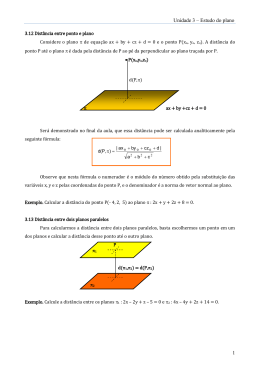
3. Distância entre dois planos.
A distância entre dois planos é zero se eles se
interceptam ou são coincidentes.
P
•
~n
A distância entre dois planos paralelos é a
distância de qualquer ponto de um dos
planos ao outro plano.
4. Distância entre ponto e reta no espaço.
H
H
"•HH
" Q H
π
115
Dada uma reta r : X = A + t~v , t ∈ R, e um ponto P = (x0 , y0 , z0 ) fora de r, a distância de
P a r é o comprimento do segmento P Q perpendicular a r, com Q ∈ r.
Pode-se determinar Q como a intersecção de
r com o plano π perpendicular a r passando
por P , de equação geral
P•
r
a(x − x0 ) + b(y − y0 ) + c(z − z0 ) = 0.
−−→
Daı́, basta calcular |P Q|.
T
−→
Mas também pode-se projetar o vetor AP
•
A
~v
•
Q
sobre o vetor ~v da reta, obtendo um vetor ~v1 ,
−→
donde o vetor AP − ~v1 será ortogonal a r e
seu comprimento é a distância procurada.
5. Distância entre duas retas.
Sejam as retas r1 : X = A + t~v1 , t ∈ R, e r2 : X = B + s~v2 , s ∈ R.
se r1 e r2 forem duas retas coincidentes ou duas retas concorrentes, a distância entre elas é
zero.
Se r1 e r2 são duas retas paralelas, a
r1
distância entre elas é o comprimento de um
segmento P Q, onde P ∈ r1 , Q ∈ r2 e P Q
perpendicular às duas retas. Para se obter
esta distância, basta escolher qualquer ponto
P ∈ r1 e calcular a distância de P a r2 .
P•
A
=
r 2)
1,
r
(
t
dis
,r
t(P
s
i
d
2)
r2
A •
Q
Também no caso de retas r1 e r2 reversas, a distância é dada como o comprimento do segmento
P Q,
116
~v2 × ~v1
onde P ∈ r1 , Q ∈ r2 e P Q é perpendicular às
r1
duas retas.
A
•
O plano α : X = A + t~v1 + s~v1 × ~v2 é um
plano contendo r1 e a direção normal às duas
retas. Logo o segmento P Q procurado está
em α e portanto, Q ∈ r2 só pode ser r2 ∩ α.
P
•
π1
(
~v1 (
d(r1 ,r2 )
~v2 × ~v1
α
(
•
((((
(
B
(
(
(•(
((((Q
π2
((((
Fica como exercı́cio encontrar P .
r2
~v2
Essa distância pode ser obtida de diversas maneiras sem necessariamente obter-se os pontos
P e Q.
• Os planos paralelos π1 e π2 contendo r1 e r2 respectivamente, como na figura, distam
entre si dist(π1 , π2 ) = dist(r1 , r2 ).
• Mas tendo o plano π1 contendo r1 e paralelo a r2 , a distância de r1 a r2 é a distância
deste plano a r2 .
• Ou ainda, tomando dois pontos quaisquer A ∈ r1 e B ∈ r2 . e projetando ortogonal−
−→
mente o vetor AB sobre o vetor ~v1 × ~v2 ,obtemos um vetor ortogonal às duas retas e de
comprimento igual à distância.
Em todos os casos, a distância entre as retas r1 e r2 é o menor comprimento |XY |, onde
X ∈ r1 e Y ∈ r2 . E esse mı́nimo ocorre no segmento P Q perpendicular às duas retas.
Simétrico de um ponto P em relação a um plano π
Por P ∈
/ π, considere a reta perpendicular a π
P
•
que o intercepta num único ponto Q. O ponto
simétrico a Q em relação a π é o ponto P ′ sobre
−−→ −−→
esta reta que satisfaz P Q = QP ′ . Que
~n
H
H
"•HH
" Q H
estratégia você usaria para encontrar o ponto
P ′?
•P
′
π
Download