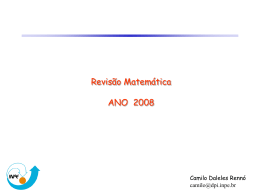
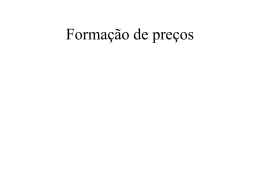
Sumário e Objectivos Sumário: Resolução de Problemas em Elasticidade Plana Recorrendo à Função de Tensão de Airy. Entrega dos Trabalhos Objectivos da Aula: Apreensão do Método da Função de Tensão para Efeitos de Solução de Alguns Problemas Planos. Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 1 ESTADO PLANO DE TENSÃO zz 0 ou 33 0 Tensões Nulas no Estado Plano de Tensão Equações de Equilíbrio xz yz 0 ou 13 23 0 xx,x xy,y Bx 0 xy,x yy,y By 0 Bz 0 ou ij, j Bi 0 com i=1,2 e j=1,2 Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 2 Forças de Volume O vector das Forças de Volume pode ser estabelecido em termos de uma função potencial V B V V,i eˆ i corresponde em termos energéticos a considerar um campo de forças conservativo. Equações de xx,x xy,y V,x 0 Equilíbrio tomam a xy,x yy,y V,y 0 forma: V,z 0 Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana ou ij, j V ,i 0 3 Função de Tensão É possível definir uma Função de Tensão tal que: xx V ,yy yy V ,xx xy ,xy As Tensões assim definidas verificam automaticamente as Equações de Equilíbrio Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 4 Deformações em termos da Tensões As Deformações relacionam-se com as tensões através da 1 Lei de Hooke generalizada ε xx = ε yy ε zz ε xy ε xz Lúcia Dinis 2005/2006 σ xx - νσ yy E 1 = σ yy - νσ xx E -ν = σ xx + σ yy E 1 = σ xy 2G = ε yz = 0 Mecânica dos Sólidos não Linear Elasticidade Plana 5 Deformações em Termos da Função de Tensão Tendo em conta as equações anteriores as deformações exprimem-se em termos da função de tensão do seguinte modo: 1 ε xx = ,yy - ν,xx + 1- ν V E 1 1 ε yy = ,xx - ν,yy + 1- ν V ; ε xy = ,xy E 2G -ν ε zz = ,xx + ,yy + 2V ; ε xz = ε yz = 0 E Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 6 Equações de Compatibilidade de St Venant 2 ∂ 2 ε xy ∂ 2 ε xx ∂ ε yy + =2 ∂x∂y ∂x 2 ∂y 2 ∂ 2 ε yy ∂z 2 ∂ 2 ε yz ∂ 2 ε zz + =2 2 ∂y∂z ∂y ∂ 2 ε zz ∂ 2 ε xx ∂ 2 ε xz + =2 ∂x∂z ∂x 2 ∂z 2 ∂ 2 ε xy ∂ 2 ε xz ∂ 2 ε yz ∂ 2 ε xx + = 2 ∂x∂z ∂x∂y ∂x ∂y∂z ∂ 2 ε yz ∂ 2 ε xy ∂ 2 ε xz ∂ 2 ε yy + = 2 ∂x∂z ∂y∂z ∂y ∂x∂z ∂ 2 ε xy 2 ∂ 2 ε xz ∂ ε yz ∂ 2 ε zz + = ∂y∂z ∂x∂z ∂z 2 ∂x∂y Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 7 Equações de Compatibilidade no Caso do Estado Plano de Tensão No caso do Estado Plano de Tensão todas as derivadas em ordem a z são nulas e as deformações fora do plano x,y são tais que: ε zz ≠ 0 ε xz = ε yz = 0 As equações de compatibilidade relevantes são 2 ∂ 2 ε xy ∂ 2 ε xx ∂ ε yy + =2 2 2 ∂x∂y ∂x ∂y ∂ 2 ε zz =0 2 ∂x Lúcia Dinis 2005/2006 a) ∂ 2 ε zz =0 2 ∂y c) ∂ 2 ε zz =0 ∂x∂y Mecânica dos Sólidos não Linear Elasticidade Plana b) d) 8 Equação de Compatibilidade em Termos da função de Tensão 1 ,yyyy - ,xxyy + 1+ V,xx + ,xxxx - ,xxyy + 1+ V,yy E 1 E = - ,xxyy sendo = 2(1+ ) G G ou 4 (1 ) 2 V 4 4 4 sendo : 4 4 2 2 2 4 x x y y 2V 2V 4 4 4 2 2 2 4 (1 ) 2 2 4 x x y y y x Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 9 Equações Fundamentais O processo de deformação correspondente a um estado plano de tensão passa a ser regido pelas equações seguintes 4 (1 ) 2 V Ou na ausência de forças de volume 4 0 xx V ,yy yy V ,xx xx ,yy xy ,xy yy ,xx xy ,xy Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 10 ESTADO PLANO DE DEFORMAÇÃO No caso do Estado Plano de Deformação as Equações a que se chega são: Ou na ausência de Forças (1 2) 2 4 V de Volume 1 4 0 xx V ,yy xx ,yy yy V ,xx yy ,xx xy ,xy Lúcia Dinis 2005/2006 xy ,xy Mecânica dos Sólidos não Linear Elasticidade Plana 11 Equação Biharmónica Na ausência de Forças de Volume a solução de Probemas de Estados Planos de Tensão e Deformação passa pela solução da equação Biharmónica ou seja pela solução de 4 0 xx ,yy yy ,xx xy ,xy Lúcia Dinis 2005/2006 Soluções Polinomiais são possíveis para alguns problemas e têm a forma Cmn x m yn m n com m n 3 Mecânica dos Sólidos não Linear Elasticidade Plana 12 Placas Rectangulares S2 y S1 x x cy S12 (a) Lúcia Dinis 2005/2006 (b) Mecânica dos Sólidos não Linear Elasticidade Plana 13 Função de Tensão para as placas Rectangulares Placa da Figura (a) uma função de tensão possível é a1x a 2xy a3y 2 As Tensões correspondentes são: x 2a 3 y 2a1 Condições de Fronteira Coeficientes ai Função de Tensão Lúcia Dinis 2005/2006 x S1 y S2 2 xy a 2 xy S12 S2 S1 a 2 S12 a 3 2 2 S S 2 x 2 S12xy 1 y 2 2 2 a1 Mecânica dos Sólidos não Linear Elasticidade Plana 14 Função de Tensão para as placas Rectangulares Placa da Figura (b) uma função de tensão possível é a1x3 a 2x 2y a3x y2 a 4y3 Esta função de tensão conduz às tensões seguintes: x 6a 4y 2a 3x y 6a1x 2a 2y xy 2a 2x 2a 3y Para x=0 e x=L as tensões são: x cy Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana y 0 xy 0 15 Função de Tensão para as placas Rectangulares Para y=±b/2 as tensões são: x 0 y 0 xy 0 Estas condições de fronteira implicam que as constantes sejam: a1 a 2 a 3 0 e a4 c / 4 ou seja a função de Airy é: c 3 y 6 Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 16 Viga em Consola Sujeita a uma Carga Pontual P P x z b y l y h Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 17 Viga em Consola Sujeita a uma Carga Pontual A função de tensão neste caso é: P xy3 b 2xy I 6 8 As componentes da tensão são P xx xy I A tensão máxima é Lúcia Dinis 2005/2006 y 0 P b2 h b3 2 xy y sendo I= 2I 4 12 6Pl max 2 hb Mecânica dos Sólidos não Linear Elasticidade Plana 18 Viga em consola sujeita a uma carga uniformemente distribuída p p x z b y l y h Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 19 Viga em consola sujeita a uma carga uniformemente distribuída Afunção de Airy a considerar é de 5ª ordem e tem a forma 3 5 3 seguinte: C1x 2 y C2 y C3x 2y C4x 2 C5 y as condições de fronteira b b p Para y= 0 e 0 Para y=- e 0 que são: 2 2 h yy Para x=0 e x=l xy yy b 2 b 2 h xxdy 0 Para x=0 Esforço Normal nulo nas extremidades Livre e.Encastrada Para x=l h xydy pl x=l h y xxdy 0 Lúcia Dinis 2005/2006 p2 h y xxdy l 2 h xydy 0 Esforço de Corte prescrito na extremidade.Encastrada b 2 b 2 b 2 b 2 b 2 b 2 Esforço de Corte nulo na extremidade.Livre b 2 b 2 Para x=0 xy Momento Flector nulo na extremidade.Livre Momento Flector prescrito na extremidade.Encastrada Mecânica dos Sólidos não Linear Elasticidade Plana 20 Viga em consola sujeita a uma carga uniformemente distribuída A equação de compatibilidade obriga a que seja Tendo em conta as condições de fronteira referidas obtém-se as constantes seguintes: C1 Consequentemente as tensões, são: 1 C2 C1 5 p 3 p 1p 1 p C3 C4 C1 h b3 4 hb 4h 10 hb p x 3y p y 3 3 py 4 3 xx 6 3 hb h b 5 bh p y 3 3 py 1 p yy 2 3 h b 2 bh 2 h 2 px y 3 px 6 xy h b 3 2 bh Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 21 ESTADOS PLANOS EM COORDENADAS CILÍNDRICAS r r rr Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 22 ESTADOS PLANOS EM COORDENADAS CILÍNDRICAS As Equações de Equilíbrio de Forças tomam a forma: σ rr σ rr σθθ 1 σθθ Br 0 r r r θ σ rθ 2σ rθ 1 σθθ Bθ 0 r r r θ As relações Deformações – Deslocamentos são: u r u r,r r u 1 u u r 1 r u , r r r r u u 1 1 u 1 u r 1 r u u ,r r, 2 r r r 2 r r rr Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 23 ESTADOS PLANOS EM COORDENADAS CILÍNDRICAS x r cos θ y r sin θ x 2 y2 r 2 y θ tan -1 x 1 x 1 2 2 2 r,x x y 2x cos θ r 2 y r,y sin θ r sin θ y 1 y 2 2 θ,x 2 r r 1 xy x θ,y Lúcia Dinis 2005/2006 1 1 y x 1 y cos θ 2 2 r x r Mecânica dos Sólidos não Linear Elasticidade Plana 24 ESTADOS PLANOS EM COORDENADAS CILÍNDRICAS As derivadas de uma função em ordem a x e a y podem ser calculadas a partir das derivadas em ordem a r e do seguinte modo: x y r r ,x r Lúcia Dinis 2005/2006 r ,y θ θ ,x ,y ou ou x y cos θ sin θ r r sin θ cos θ r Mecânica dos Sólidos não Linear Elasticidade Plana r 25 Transformação do Tensor das Tensões de Coordenadas Cartesianas em Polares rr ri rjij i jij r ri jij cos sen 0 ij sen cos 0 0 0 1 rr xx cos2 yy sin 2 2 xy cos sin xx sin 2 yy cos2 2 xy cos sin r xx cos sin yy cos sin xy cos 2 sin 2 Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 26 Derivadas da Função de Tensão ,xx sin cos x x x r r 2 2 sin sin 2 cos 2 cos 0 r r r r r sin 2 2 sin sin cos sin cos cos 2 r r r r2 r 2 2 2 cos sin cos sin sin sin ,rr cos 2 2,r 2, ,r , r r r r2 De modo análogo se calculam as derivadas em ordem a yy e xy. Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 27 ESTADOS PLANOS EM COORDENADAS CILÍNDRICAS 1 1 A relação entre as tensões e a função de Airy em rr ,r 2 , coordenadas cilíndricas toma a forma: r r ,rr 1 1 r , ,r r r A equação Biharmónica toma a forma seguinte: 1 1 0 ,rr ,r 2 , r r 2 2 2 2 1 1 1 1 4 2 2 2 2 2 2 r r r r r r r r 4 Lúcia Dinis 2005/2006 2 2 2 Mecânica dos Sólidos não Linear Elasticidade Plana 28 Problemas Axisimétricos 1 rr ,r r ,rr r 0 1 1 ,rr ,r r r r r ,r 2 2 1 1 4 2 ,rr ,r r r r r 4 3 2 2 1 1 4 4 2 2 3 3 r r r r r r r Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 29 Solução da Equação Biharmónica para Problemas Axiximétricos C1r ln r C2r C3 ln r C4 2 1 r2 1 C1 3 2 ln r 2C 2 C3 2 r r 0 2 rr C1 1 2 ln r 2C 2 C3 Lúcia Dinis 2005/2006 1 rr rr E 1 rr E 1 1 r r r 2G E Mecânica dos Sólidos não Linear Elasticidade Plana 30 Deslocamentos du r 1 C3 1 rr 2C2 1 C1 1 2ln r 1 2C1 dr E r2 u r 1 C3 1 2C 1 C 1 2ln r 1 2C 2 1 1 r E r2 du r 1 C3 1 2C 1 C 1 2 ln r 1 2 C 2 1 1 dr E r2 ur 1 C3 1 2C2 1 r C1 1 2r ln r r 2C1r constante E r e u r 1 C3 1 2C 1 C 1 2 ln r 1 2C 2 1 1 r E r2 ur Lúcia Dinis 2005/2006 1 C3 1 2C 1 r C 1 2r ln r r 2C r 2 1 1 E r Mecânica dos Sólidos não Linear Elasticidade Plana 31 Deslocamentos Comparando as duas expressões obtidas para o deslocamento na direcção radial conclui-se: 1 C3 1 u r 2C2 1 r C1 1 2r ln r r 2C1r constant E r 1 C3 1 2C2 1 r C1 1 2r ln r r 2C1r E r C1 0 constante 0 ur 1 C3 1 2C2 1 E r Lúcia Dinis 2005/2006 r Mecânica dos Sólidos não Linear Elasticidade Plana 32 Problemas Quasi Axisimétricos No caso de se admitir que o problema é quasi axisimétrico, isto é que as tensões só dependem de r mas os deslocamentos podem depender de , as deformações são então em termos dos deslocamentos as seguintes. du 1 C 1 rr r 3 2 2C2 1 C1 1 2 ln r 1 2C1 dr E r u r 1 u 1 C3 1 2C 1 C 1 2 ln r 1 2C 1 2 1 r r E r2 u 1 u r 1 u r 2 r r r Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 33 Problemas Quasi Axisimétricos du r 1 C3 1 2C2 1 C1 1 2 ln r 1 2C1 2 dr E r ur 1 C3 1 2C 1 r C 1 2r ln r r 2 C r f 2 1 1 E r ur 1 u 1 C3 1 2C 1 C 1 2 ln r 1 2C 1 2 1 2 r E r r f 1 u 1 4C1 r E r Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 34 Problemas Quasi Axisimétricos Integrando esta última equação obtém-se: u 1 4C1r f E 1 u 4C1r f d g r E Substituindo na expressão da deformação de corte obtémse: g r 1 1 g r f θ dθ f θ 0 r r 1 1 rg r g r f θ dθ f θ r r rg r g r C5 r f θ dθ f θ C5 Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 35 Problemas Quasi Axisimétricos Obtém-se duas equações uma só dependente de r e outra só dependente de que podem ser integradas obtendo-se: rg r g r C5 g r C5 C 6 r g r C6 f θ dθ f θ C5 f θ C7 sin C8 cos f θ dθ C5 C7 cos C8 sin Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 36 Os deslocamentos radiais e circunferenciais tomam a forma: C3 1 2C2 1 r 1 ur r E C 1 2r ln r r 2 C r C sin C cos 1 1 7 8 1 u 4 C1r C7 cos C8 sin C6 r E Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 37 CILINDRO ESPESSO E DISCO FINO Pi – Pressão na superfície interior Po- Pressão na superfície exterior Ri – Raio interior Ro – Raio exterior Lúcia Dinis 2005/2006 Ro Ri po pi Mecânica dos Sólidos não Linear Elasticidade Plana 38 CILINDRO ESPESSO E DISCO FINO As Tensões são Calculadas de acordo com 1 r2 1 C1 3 2 ln r 2C 2 C3 2 r r 0 rr C1 1 2 ln r 2C 2 C3 E têm de verificar as condições de Fronteira Ou seja po C1 1 2 ln R o 2C2 C3 1 R o2 rr R o po rr R i pi 1 pi C1 1 2 ln R i 2C2 C3 2 Ri Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 39 CILINDRO ESPESSO E DISCO FINO Estas duas condições são insuficientes para se calcularem as constantes, considerando o problema como quais axisimétrico e considerando o deslocamento circunferencial pode dizer-se que u 1 4 C r C cos C sin C r 1 E u 0 u 2 1 po 2C2 C3 2 Ro 1 pi 2C2 C3 2 Ri Lúcia Dinis 2005/2006 C1 0 7 C2 C3 Mecânica dos Sólidos não Linear Elasticidade Plana 8 6 pi R i2 po R o2 2 R o2 R i2 R i2 R o2 po pi R 2 o R i2 40 CILINDRO ESPESSO E DISCO FINO As tensões tomam a forma rr pi R i2 po R o2 R o2 R i2 pi R i2 po R o2 R o2 R i2 R i2 R o2 po pi r 2 R o2 R i2 R i2 R o2 po pi r 2 R o2 R i2 e para o estado plano de deformação é zz rr Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana R 2 pi R i2 po R o2 2 o R i2 41 CILINDRO ESPESSO E DISCO FINO Os deslocamentos são ur C2 C3 1 C3 1 2C2 1 r E r pi R i2 po R o2 2 R o2 R i2 R i2 R o2 po pi R 2 o R i2 2 2 pi R i2 po R o2 1 R i R o p o pi u r 1 2 2 1 2 2 E Ro Ri Ro Ri r Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana r 42 PLACA INFINITA COM PEQUENO ORÍFICIO R pi Lúcia Dinis 2005/2006 i pi Mecânica dos Sólidos não Linear Elasticidade Plana 43 PLACA INFINITA COM PEQUENO ORÍFICIO Considerem-se as tensões obtidas no caso anterior e manipulem-se as expressões de forma a obter as tensões com a seguinte forma: R i2 Fazendo as aproximações pi 2 p o 2 R p pi Ro rr i o seguintes 2 2 Ri 1 2 Ro Ri r 1 2 Ro R i2 pi 2 Ro R i2 p o pi 1 Lúcia Dinis 2005/2006 2 po R i2 R o2 r 2 1 R i2 R o2 p o 0 sendo rr 2 Ro R i2 pi r2 Mecânica dos Sólidos não Linear Elasticidade Plana R i2 0 2 Ro R i2 pi r2 44 PLACA COM ORÍFICIO TRACCIONADA Tensões Longe do Orifício Tx B xx Tx A A yy 0 y xy 0 x Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana Tx 45 PLACA COM ORÍFICIO TRACCIONADA No caso de existir o orifício a distribuição de tensões só se altera próximo do orifício. Considerando o princípio de St. Venant pode considerar-se um círculo de raio RB tal que B>>A e no qual as tensões ainda são obtidas considerando as expressões e convertam-se as tensões em coordenadas T cilíndricas. B, T cos 2 x 1 cos 2 rr x 2 Tx 2 B, Tx sin 1 cos 2 2 T rr B, Tx cos sin x sin 2 2 Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 46 PLACA COM ORÍFICIO TRACCIONADA Alternativamente pode considerar-se. xx Tx 1 Tx y 2 2 y r sin 1 2 Tx r sin 2 1 1 Tx r 2 sin 2 Tx r 2 1 cos 2 2 4 Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 47 PLACA COM ORÍFICIO TRACCIONADA Sendo as tensões em termos da função de Airy, as seguintes: rr 1 ,r 1 , r2 r ,rr 1 1 r , ,r r r As tensões são nestas condições: Lúcia Dinis 2005/2006 Tx T T 1 cos 2 x x cos 2 2 2 2 T T r B, x sin 2 0 x sin 2 2 2 rr B, Mecânica dos Sólidos não Linear Elasticidade Plana 48 PLACA COM ORÍFICIO TRACCIONADA Estas tensões correspondem à sobreposição de dois estados de tensão um axisimétrico e outro dependente de , estes estados de tensão são: Axisimetrico: T 1 rr B, x 2 B, 0 1 Lúcia Dinis 2005/2006 dependente de : T 2 rr B, x cos 2 2 Tx 2 B, sin 2 2 Mecânica dos Sólidos não Linear Elasticidade Plana 49 Problema Axisimétrico As tensões para o problema axisimétrico são Ri A Ro B pi 0 po Tx 2 Tx B2 2 rr 2 2 2 B A r B2 1 Tx 2 2 B2 A 2 r 1 Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 2 2 B A A 2 B2 2 2 B A A 2 B2 50 Problema dependente de No caso do problema dependente de q considera-se a equação biharmónica e uma função de Airy com a forma adequada às condições de fronteira: F r cos 2θ A equação biharmónica toma a forma seguinte. 2 9 9 F,rrrr F,rrr 2 F,rr 3 F,r 0 r r r 1 F r C1 C2 r 2 C3r 4 C 4 2 r Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 51 Problema dependente de As tensões correspondentes são: 1 C1 C2 r 2 C3r 4 C 4 2 cos 2θ r 1 1 2 rr 4C1 2 2C 2 6C 4 4 cos 2θ r r 1 2 2C2 12C3r 2 6C 4 4 cos 2θ r 1 1 2 r 2C1 2 2C 2 6C3r 2 6C 4 4 cos 2θ r r Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 52 Problema dependente de As constantes determinam-se considerando as condições de fronteira: 2 rr A, 0 r A, 0 2 2 Tx rr B, cos 2 2 Tx 2 r B, sin 2 2 Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 53 Problema dependente de Obtendo-se o sistema de equações seguinte: 4 A2 2 A2 4 B2 2 B2 Lúcia Dinis 2005/2006 2 0 2 6A 2 2 0 2 6B2 6 0 A4 6 C1 0 4 C A 2 Tx 6 C3 2 4 B C 4 Tx 6 2 4 B Mecânica dos Sólidos não Linear Elasticidade Plana 54 Problema dependente de No caso de A<<B pode-se considerar pela 4ª equação que: 2 A2 2 A2 Tx A 2 6 A2 2A 2 2 C1 2 2 C2 6B 2 C3 4 2 C4 2 2 B B B B B B B A2 2 A2 T 6 A2 2 2 2 C1 2 2 C2 6A C3 4 2 C4 x 2 B B B B B A2 2 B A2 2 2 0 6A C3 0 C3 0 B A 3ª equação implica. Lúcia Dinis 2005/2006 Tx 2 4 6 2 2 C 2A C A C A 1 2 4 2 B2 B4 A2 Tx 2 Tx 2 0 2A C A C 2 2 2 2 4 B A 2 Mecânica dos Sólidos não Linear Elasticidade Plana 55 Problema dependente de Finalmente resolvendo as duas restantes equações obtém2 T 4 6 A x se: C1 C4 0 C1 Tx 2 A4 A2 T 2 6 2 C1 x 4 C4 0 2 A A 2 A4 C4 Tx 4 Substituindo as constantes obtidas nas expressões A2 1 3 A4 2 das tensões obtém-se: rr 2 2 4 Tx cos 2θ 2 2 r 2 1 3 A4 4 Tx cos 2θ 2 2 r 2 A2 1 3 A4 2 Tx sin 2θ 4 2 2 r r r Lúcia Dinis 2005/2006 r Mecânica dos Sólidos não Linear Elasticidade Plana 56 Caso Axi simétrico As Tensões no caso axisimétrico são: Ri A Ro B pi 0 po Tx 2 T B2 1 x rr 2 2 2 2 B A r B2 1 Tx rr 2 2 B2 A 2 r Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana A 2 B2 B 2 A2 A 2 B2 B 2 A2 57 Caso Axi-simétrico Adimitindo A/B tendente para zero obtém-se: A 0 B 2 2 T A 1 Tx A 1 x rr 1 2 2 2 2 A 2 A 2 r r 1 2 1 B2 B 2 A 1 Tx A 2 1 Tx 1 2 A 2 2 A 2 2 r 2 r 1 2 1 B2 B Lúcia Dinis 2005/2006 Mecânica dos Sólidos não Linear Elasticidade Plana 58 Tensões Totais As tensões totais quando A/B tende para zero são: 1 2 rr rr rr 1 2 1 2 r r r Lúcia Dinis 2005/2006 Tx 2 A 2 A 2 1 3 A 4 Tx cos 2θ 1 2 2 2 4 2 2 r r r T x 2 A 2 1 3 A 4 Tx cos 2θ 1 2 4 r 2 2 r A2 1 3 A4 2 Tx sin 2θ 4 2 2 r r Mecânica dos Sólidos não Linear Elasticidade Plana 59
Baixar