☰
Explorar
Assinar em
Inscrever-se
Envio
×
Baixar
Sem categoria
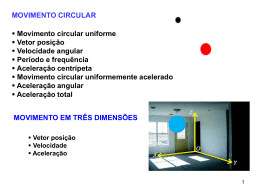
Movimento circular
MCUV, Movimento em três dinensões
II – Movimento Circular
Movimento circular
REVISÃO PÓS FÉRIAS AULA 1
Diapositivo 1
2 + sen x é
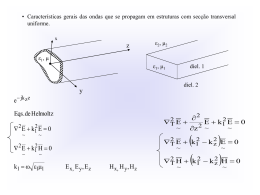
Fibras Ópticas
Movimento em duas dimensões. Projécteis
Fibras Ópticas 1
Guias metálicos
OFICINA MUPAD LIGHT - prof-nair-palacio
O Método de Jacobi Aplicado a Matrizes Simétricas Pós