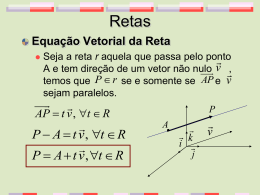
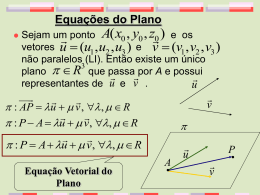
Planos e Retas Uma abordagem exploratória das Equações do Plano e da Reta Anliy Natsuyo Nashimoto Sargeant José Antônio Araújo Andrade Solange Gomes Faria Martins Na geometria, um plano é determinado se são dados: três pontos não colineares C A B uma reta e um ponto fora desta reta A B C r duas retas não coincidentes e que se interceptam em um único ponto (duas retas distintas,concorrentes). C B A t uma direção normal (vetor perpendicular ao plano) e um ponto desse plano. r EQUAÇÕES DO PLANO Equação Geral do Plano No plano a equação geral de uma reta é ax + by + c = 0 No espaço um plano é o conjunto dos pontos P = ( x, y, z ) que satisfazem a equação ax + by + cz + d = 0 para a, b, c ∈ Existe uma analogia entre uma reta no plano e um plano no espaço. No plano, a equação de uma reta é determinada se forem dados sua inclinação e um de seus pontos. No espaço, a inclinação de um plano é caracterizada por um vetor perpendicular a ele, chamado vetor normal ao plano e a equação de um plano é determinada se são dados um vetor normal e um de seus pontos. n = ( a, b, c) • P0 π i • P Exemplo 1: Sabemos que: • dois pontos determinam a equação de uma reta; Analogamente, • três pontos não colineares determinam a equação de um plano; Sejam P1 = (1, 2,3) , P2 = (1, 4,1) e P3 = ( 2,8, −4 ) pontos não colineares. A equação do plano que contém esses pontos pode ser definida por um sistema linear homogêneo a + 2b + 3c + d = 0 a + 4b + c + d = 0 2a + 8b − 4c + d = 0 1 2 3 1 0 1 4 1 1 0 L'2 =L2 −L1 → L'3 =L3 −2 L1 2 8 −4 1 0 → 1 2 3 1 0 0 2 −2 00 '' ' ' L3 =L3 −2 L2 → 0 0 −6 −10 ∼ fazendo c = α, ∼ a + 2b + 3c + d = 0 =0 2b − 2c − 6c − d = 0 temos: −6α − d = 0 • em (ii): 2b − 2α = 0 (i): a + 2α + 3α − 6α = 0 • em (iii): • em ∼ 1 2 3 10 0 2 −2 00 0 4 −10 −10 ⇒ ⇒ ⇒ d = −6α b =α a =α α α Portanto, s = , assim, α −6α para qualquer valor real que atribuímos a α (exceto α igual a zero), iremos obter uma equação do plano que contém os pontos P1 , P2 e P3 . Verificação: • Se α = 1, x+ y+ z −6 = 0 • Se α = 2, 2 x + 2 y + 2 z − 12 = 0 • Se α = −5, • Seα = *, −5 x − 5 y − 5 z + 30 = 0 α x + α y + α z − 6α = 0 No entanto, com esses três pontos (P1, P2 e P3 não colineares), podemos determinar a equação do plano π, que os contém, de outra maneira: n = P1 P3 ∧ P1 P2 • • 1 P P2 π P3• Determinando as componentes do vetor n, conheceremos os coeficientes a, b e c da equação do plano (π : ax + by + cz + d = 0 ): n = P1 P3 ∧ P1 P2 ( I ) antes, vamos determinar as componentes dos vetores P1 P3 e P1 P2 P1 P3 = P3 − P1 = ( 2,8, −4 ) − (1, 2,3) = (1,6, −7 ) P1 P2 = P2 − P1 = (1, 4,1) − (1, 2,3) = ( 0, 2, −2 ) retornando a relação ( I ): n = (1,6, −7 ) ∧ ( 0, 2, −2 ) 1 6 −7 0 2 −2 6 −7 1 −7 1 6 n = det , − det ,det ⇒ n = ( 2, 2, 2 ) 2 −2 0 −2 0 2 deste modo, podemos escrever: π : 2 x + 2 y + 2 z + d = 0 ( II ) para determinar d e conhecer a equação geral do plano π, basta substituirmos as coordenadas de um dos três pontos do plano, que já conhecemos, em (II): 2x + 2 y + 2z + d = 0 2 ⋅1 + 2 ⋅ 2 + 2 ⋅ 3 + d = 0 ⇒ d = −12 Logo, π : 2 x + 2 y + 2 z − 12 = 0 ou π : x+ y+ z −6 = 0 Proposição: A equação geral de um plano π que passa por um ponto P0 = ( x0 , y0 , z0 ) e tem vetor normal n = ( a, b, c ) é ax + by + cz + d = 0 em que d = − ( ax0 + by0 + cz0 ) . Demonstração: Se n = ( a, b, c ) é a direção normal de um plano π que passa pelo ponto P0 = ( x0 , y0 , z0 ) , um ponto P = ( x, y, z ) pertence a π se, e somente se, o vetor P0 P é ortogonal a n , o que equivale a, P ∈ π ⇔ P0 P ⊥ n ou P ∈ π ⇔ ( P − P0 ) ⊥ n n P0 π • i • P Pela proposição, sabemos que: P ∈ π ⇔ P0 P ⊥ n , então, n ⋅ P0 P = 0 ( I ) considerando que P0 P = P − P0 = ( x, y, z ) − ( x0 , y0 , z0 ) = n ⋅ P0 P = 0 ⇒ = ( x − x0 , y − y0 , z − z0 ) , em (I): ( a, b, c ) ( x − x0 , y − y0 , z − z0 ) = 0 a ( x − x0 ) + b ( y − y0 ) + c ( z − z0 ) = 0 ax − ax0 + by − by0 + cz − cz0 = 0 ax + by + cz − ( ax0 + by0 + cz0 ) = 0 sendo d = − ( ax0 + by0 + cz0 ) , temos: ax + by + cz + d = 0 Equação geral do plano π Exemplo 2: Encontre a equação do plano π que passa pelo P0 = (1,1, −2 ) e é perpendicular ao vetor n = ( 4, 2,3) . ponto Exemplo 3: Encontre a equação do plano π que passa pelos 1 1 1 1 pontos P1 = ,0,0 , P2 = 0, ,0 e P3 = 0, − , . 2 2 2 2 n = P1 P2 ∧ P1 P3 • 1 Pi i • P3 π P2• determinando as componentes dos vetores P1 P2 e P1 P3: 1 1 1 1 P1 P2 = P2 − P1 = 0, ,0 − ,0,0 = − , ,0 2 2 2 2 1 1 1 1 1 1 P1 P3 = P3 − P1 = 0, − , − ,0,0 = − , − , 2 2 2 2 2 2 determinando as componentes do vetor n : 1 1 1 1 1 n = P1 P2 ∧ P1 P3 ⇒ n = − , ,0 ∧ − , − , 2 2 2 2 2 1 1 − 2 2 0 − 1 − 1 1 2 2 2 1 2 n = det − 1 2 1 0 − 2 , − det 1 − 1 2 2 1 0 − 2 ,det 1 − 1 2 2 1 1 1 n = , , 4 4 2 assim, a equação do plano π pode ser escrita como: 1 1 1 x+ y+ z+d =0 4 4 2 1 escolhendo o ponto P1 = ,0,0 , encontramos d: 2 1 1 1 1 ⋅ + ⋅0 + ⋅0 + d = 0 4 2 4 2 ⇒ 1 d =− 8 1 2 1 − 2 Logo, a equação geral do plano π que passa pelos pontos e P3 é: 1 1 1 1 x+ y+ z− =0 4 4 2 8 2x + 2 y + 4z −1 = 0 P1 , P2 multiplicando toda a equação por 8 Retornando ao Exemplo 3: Encontre a equação do plano π que 1 passa pelos pontos P1 = ,0,0 , 2 1 1 1 P2 = 0, ,0 e P3 = 0, − , . 2 2 2 Para resolver este problema podemos usar o seguinte corolário: Sejam u = u1i + u2 j + u3 k , v = v1i + v2 j + v3 k e w = w1i + w2 j + w3k . Estes vetores são coplanares (isto é, são paralelos a um mesmo plano) se, e apenas se, u1 u2 u3 u ( ∧ v ) ⋅ w = det v1 v2 v3 = 0 w1 w2 w3 e ainda, o fato de que este resultado é usado para verificar se quatro pontos são coplanares. Vejamos: • • 1 P P3 • P = ( x, y , z ) π P2• Seja P1 P ⋅ P1 P2 ∧ P1 P3 = 0, ( ) n precisamos determinar as componentes dos vetor P1 P, P1 P2 e P1 P3 : 1 1 P1 P = P − P1 = ( x, y, z ) − ,0,0 = x − , y, z 2 2 1 1 1 1 1 P1 P2 = − , ,0 P1 P3 = − , − , e 2 2 2 2 2 assim, P1 P ⋅ P1 P2 ∧ P1 P3 = 0, ( 1 x − 2 1 det − 2 1 − 2 y 1 2 1 − 2 z 0 = 0 1 2 ⇒ ) 1 x − 2 −1 2 1 − 2 y 1 2 1 − 2 1 z x− 2 1 0 − 2 1 1 − 2 2 y 1 =0 2 1 − 2 1 1 1 1 1 1 x − 2 ⋅ 2 ⋅ 2 + 0 + 4 z − − 4 z + 0 − 4 y = 0 1 1 1 1 x+ y+ z− =0 4 4 2 8 2x + 2 y + 4z −1 = 0 multiplicando toda a equação 8 Ou Seja, P , P e P (não colineares) de um plano, P = ( x, y, z ) deste plano pode ser determinado dados três pontos qualquer ponto 1 2 3 se são considerados: três vetores PP , PP e PP 1 3 1 1 2 e que os vetores PP , PP e PP são coplanares se, e 1 2 1 1 3 somente se P1 P ⋅ P1 P2 ∧ P1 P3 = 0 ( ) (produto misto) n = PP ∧ PP 1 2 1 3 • • 1 P P3 • P = ( x, y , z ) π P2• P1 P ⋅ P1 P2 ∧ P1 P3 = 0 ( ) n Equações Paramétricas Consideremos: • um plano π; • um ponto P0 = ( x0 , y0 , z0 ) , tal que P0 ∈ π ; • os vetores: v = ( v1 , v2 , v3 ) , tais que v e w não sejam w = ( w1 , w2 , w3 ) paralelos e que [ v , w ] // π . Um ponto P = ( x, y, z ) pertence a π se, e somente se, o vetor P0 P = ( x − x0 , y − y0 , z − z0 ) é uma combinação linear de v e w, ou seja, se existem escalares t e s tais que P0 P = tv + sw P ∈ π ⇔ P0 P = tv + sw Combinação Linear Equação vetorial do plano π. ( x − x0 , y − y0 , z − z0 ) = t (v1 , v2 , v3 ) + s( w1 , w2 , w3 ) P0 P = tv + sw ( x − x0 , y − y0 , z − z0 ) = (v1t , v2t , v3t ) + ( w1s, w2 s, w3 s) Logo, um ponto P = ( x, y, z ) pertence a π se, e somente se, satisfaz as equações x − x0 = v1t + w1s y − y0 = v2t + w2 s z − z = v t + w s 0 3 3 ∼ x = x0 + v1t + w1s y = y0 + v2t + w2 s para t , s ∈ z = z + v t + w s 0 3 3 Equações paramétricas do plano π Exemplo 4: Podemos obter equações paramétricas do plano do Exemplo 2 usando o fato de que ele passa pelo 1 ponto P1 = ,0,0 e é paralelo aos vetores 2 1 1 1 1 1 P1 P2 = − , ,0 e P1 P3 = − , − , . Assim, 2 2 2 2 2 1 1 1 x = 2 − 2 t − 2 s 1 1 y = 0 + t − s 2 2 1 z = 0 + 0 ⋅ t + 2 s ∼ 1 1 1 x = 2 − 2 t − 2 s 1 1 y = t − s 2 2 1 z = 2 s para t , s ∈ Exemplo 5: Encontre as equações paramétricas do plano 4 x + 2 y + 3z = 0 . Para encontrarmos as equações paramétricas deste plano podemos proceder como no caso de sistemas lineares e considerar as variáveis y e z livres: z =t e y = s. Assim, 3 1 x = − t − s e, portanto, 4 2 3 1 x = − 4 t − 2 s y = s z = t são equações paramétricas do plano. Destas equações 3 1 obtemos que os vetores v = − ,0,1 e w = − ,1,0 que são 4 2 paralelos ao plano. EQUAÇÕES DA RETA Equações Paramétricas Consideremos: • um reta r; • um ponto P0 = ( x0 , y0 , z0 ) , tal que P0 ∈ r ; • um vetor v = ( a, b, c ) , tal que v // r ; • um ponto qualquer do espaço P = ( x, y, z ) . z ? P r • • P0 x v y Neste caso: P∈r ⇔ P − P // v ( 0) ou P ∈ r ⇔ P0 P // v isto é, P0 P = tv ( I ) ⇓ P − P0 = tv ⇒ P = P0 + tv Equação vetorial de r. escrevendo (I) em termos de suas componentes P0 P = tv P − P0 = t ( a, b, c ) ( x, y, z ) − ( x0 , y0 , z0 ) = (ta, tb, tc) ( x − x0 , y − y0 , z − z0 ) = (at , bt , ct ) Logo, a reta r pode ser descrita como sendo o conjunto dos pontos P = ( x, y, z ) tais que x − x0 = at y − y0 = bt z − z = ct 0 ∼ x = x0 + at y = y0 + bt z = z + ct 0 para t ∈ Equações paramétricas de uma reta r, que passa por um ponto P0 = ( x0 , y0 , z0 ) e é paralela ao vetor v = ( a, b, c ) . O vetor v é chamado vetor diretor da reta r. Exemplo 6: As seguintes equações são equações paramétricas de uma reta r . x = 2 + 3t r : y = −1 + 2t z = 10 − t (a) Calcule dois pontos e um vetor diretor de r. 7 19 (b) Verifique se P = ,0, e Q = ( 5,1,8 ) 2 2 pertencem r. Equações na forma Simétrica Consideremos agora uma reta dada por suas equações paramétricas x = x + at r : y = y + bt z = z + ct 0 sendo a, b e c não-nulos 0 0 calculando t nas três equações, obtemos y− y t= b x−x t= a 0 z−z t= c 0 Logo, x−x y− y z−z = = c c c 0 0 0 0 Exemplo 7: Dada as equações 3x − 2 1 − y = = z +5 7 4 mostre que elas representam uma reta, e dê um ponto e um vetor diretor da mesma. Exemplo 8: Encontre as equações paramétricas da reta passa pelos pontos P1 = ( 3,0, 2 ) e P2 = ( 0,3,3) . r que Exemplo 9: Encontre as equações paramétricas da reta r, interseção dos planos π 1 : −2 x + y + 4 z = 0 π 2 : 2x − y + 2z = 0 r n1 n1 n2 π1 n2 v π2 Se n1 ⊥ π 1 , n2 ⊥ π 2 e r = (π 1 ∩ π 2 ) , ou seja, r ⊂ [π 1 , π 2 ] ; então, r ⊥ [ n1 , n2 ] e como r // v , pois v é vetor diretor de r, então v ⊥ [ n1 , n2 ] , isto é, v = n1 ∧ n2 v = ( −2,1, 4 ) ∧ ( 2, −1, 2 ) −2 1 4 2 −1 2 1 4 −2 4 −2 1 v = det , − det ,det −1 2 2 2 2 −1 v = ( 6,12,0 ) Precisamos de um ponto da reta r. podemos encontrá-lo considerando o fato de que um ponto comum aos planos π1 e π2 também é um ponto da reta r. −2 x + y + 4 z = 0 2x − y + 2z = 0 Como ambos os planos passam pela origem, ou seja, como se trata de um sistema homogêneo, então o ponto P0 = ( 0,0,0 ) pertence a reta r. Logo, x = 0 + 6t y = 0 + 12t z = 0 + 0t ∼ x = 6t y = 12t z = 0 para t ∈ Exemplo 10: Ache as equações paramétricas da reta intercepta as retas x = −1 + 2t r1 : y = 1 + t z = 0 y−4 r : x−2= e z =3 2 e é perpendicular a ambas. 3 para t ∈ e 2 r que
Baixar