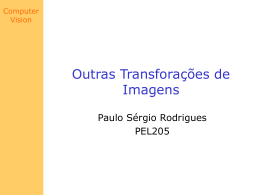
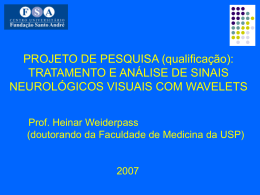
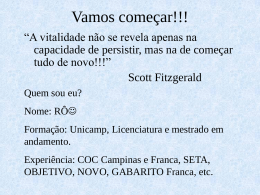
Computer Vision Transformação de Imagens Paulo Sérgio Rodrigues PEL205 Computer Vision Introdução a Transformada de Fourier Computer Vision Séries de Fourier Chama-se série trigonométrica, uma série da forma: a0 a1 cos( x) b1sen ( x) a2 cos( 2 x) b2 sen (2 x) 2 a0 ak cos(kx) bk sen(kx) 2 k 1 Computer Vision Séries de Fourier a0 ak cos(kx) bk sen(kx) 2 k 1 As constantes a0, ak e bk (1,2,...) são os coeficientes da série trigonométrica Se essa série trigonométrica convergir, a sua soma é uma função periódica f(x) de período 2π, dado que sen(kx) e cos(kx) são funções periódicas de período 2π. De modo que: f(x) = f(x + 2π) Computer Vision Séries de Fourier •Problema: para uma função periódica f(x) de período 2π, quais as condições impostas a f(x) de modo que exista uma série trigonométrica convergente para f(x)? f(x) a0 f ( x) ak cos(kx) bk sen(kx) 2 k 1 Computer Vision Séries de Fourier a0 f ( x) ak cos(kx) bk sen(kx) 2 k 1 A série acima pode ser então integrável de –π a π. a0 f ( x)dx dx ak coskxdx bk senkxdx 2 k 1 Computer Vision Séries de Fourier a0 f ( x)dx dx ak coskxdx bk senkxdx 2 k 1 a0 0 dx a 0 2 ak senkx ak coskxdx ak coskxdx k 0 bk coskx bk senkxdx bk senkxdx k 0 Computer Vision Séries de Fourier a0 f ( x)dx dx ak coskxdx bk senkxdx 2 k 1 a0 2 dx a0 a0 1 f ( x)dx Agora só falta de determinar ak e bk !! Computer Vision Séries de Fourier a0 f ( x) ak cos(kx) bk sen(kx) 2 k 1 Multipliquemos os dois membros da equação acima por cos(nx) a0 f ( x) cosnx cosnx ak cos(kx) cosnx bk sen(kx) cosnx 2 k 1 Computer Vision Séries de Fourier a0 f ( x) cosnx cosnx ak cos(kx) cosnx bk sen(kx) cosnx 2 k 1 Integrando de –π a π termo a termo ambos os membros da equação acima a0 f ( x ) cos nx dx 2 cos nx dx a cos kx cos nx dx b sen kx cos nx dx k k k 1 No entanto, sabemos que: coskxsennxdx 0 e 2 cos kxdx , n, k Z Computer Vision a0 f ( x ) cos nx dx 2 Séries de Fourier cos nx dx a cos kx cos nx dx b sen kx cos nx dx k k k 1 0 0 Lembrando que: coskxsennxdx 0 e 2 cos kxdx , n, k Z f ( x) coskxdx ak cos2 kxdx ak ak 1 f ( x) coskxdx Computer Vision a0 f ( x ) cos nx dx 2 ak 1 Séries de Fourier cosnxdx ak coskx cosnxdx bk senkx cosnxdx k 1 f ( x) coskxdx De maneira análoga, multiplicando a equação acima por sen(nx) ao invés de cos(nx), chegamos a: bk 1 f ( x)sen kx dx que se junta a: a0 1 f ( x)dx Computer Vision Séries de Fourier a0 f ( x) ak cos(kx) bk sen(kx) 2 k 1 a0 1 f ( x)dx bk 1 f ( x)sen kx dx ak 1 f ( x) coskxdx Computer Vision Série de Fourier Jean Baptiste Joseph Fourier (1768-1830) Paper de 1807 para o Institut de France: Joseph Louis Lagrange (1736-1813), and Pierre Simon de Laplace (1749-1827). 2kt 2kt f (t ) a0 2 (ak cos bk sin ) T T k 1 Computer Vision Coeficientes da Série f(t) 0 T t 2 kt 2 kt f (t ) a0 2 (ak cos bk sin ) T T k 1 1 T 2 kt ak f (t ) cos( )dt 0 T T 1 bk T T 0 2 kt f (t ) sin( )dt T k 0,1,2,3,... k 1,2,3,... Computer Vision Série de Fourier com números complexos ei e i cos 2 ei e i sin 2i 2kt 2kt f (t ) a0 2 ak cos bn sin T T k 1 2kt i 2kt i b T f (t ) a0 ak e e T k k 1 i 2kt i i 2Tkt T e e 1 i bk i 2Tkt bk i 2Tkt f (t ) a0 ak e ak e i i k 1 2kt 2kt i i T T f (t ) F0 Fk e F k e k 1 i i i 2 1 i F0 a0 , Fk ak ibk , Fk ak ibk Fk Fk f (t ) i ( 1 T Fk f (t )e T 0 F e k 2kt ) T i 2kt T k dt k 1,2,3,... Computer Vision Periodicidade da Série de Fourier f(t) 0 t T 2 k 2 k f (t T ) a0 2 ak cos (t T ) bk sin (t T ) f (t ) T T k 1 f(t) 0 T t Computer Vision Transformada de Fourier F ( w) f ( x)e i 2wx f ( x) F ( w)e i 2wx dx dw Computer Vision Transformada de Fourier (outra notação) f x F u f xe j 2ux dx onde j 1 F u f x F u e 1 j 2ux du Computer Vision Introdução a Transformada de Fourier Pu F u R u I u 2 2 2 Computer Vision Introdução a Transformada de Fourier f x, y F u, v f x, y e j 2 ux vy dxdy 1F u , v f x, y F u , v e j 2 ux vy dudv Computer Vision Introdução a Transformada de Fourier Pu , v F u , v R u , v I u , v 2 2 2 Computer Vision Introdução a Transformada de Fourier Pu , v F u , v R u , v I u , v 2 2 2 Computer Vision Transformada Discreta de Fourier f x0 , f x0 x, f x0 2x,, f x0 N 1x 1 N 1 j 2u / N F u f x e N x 0 N 1 f x F u e u 0 j 2u / N Computer Vision Transformada Discreta de Fourier f x0 , f x0 x, f x0 2x,, f x0 N 1x 1 M 1 N 1 j 2 ux / M vy / N F u, v f x , y e MN x0 y 0 M 1 N 1 f x, y F u, v e u 0 v 0 j 2 ux / M vy / N Computer Vision Resultados da Transformada de Fourier Computer Vision Exemplo 1: Função caixa (box) a f(x) 0 se x b 2 f ( x) a se x [ b 2, b 2] 0 se x b 2 x b F ( w) f ( x)e i 2wx a e i 2wx i 2w b/2 i 2wx a e dx dx b / 2 a iwb iwb e e b / 2 i 2w a a eiwb e iwb sin(wb ) w w 2i sin(wb) F ( w) ab wb b/2 Computer Vision Transformada da função box a sin(wb) F ( w) ab wb f(x) x b sin(bw) F ( w) ab bw ab F(w) sinc(bw) -3/b -2/b -1/b 0 1/b 2/b 3/b w Computer Vision Distribuição normal: Gaussiana Gaus( x) 1 2 e x2 2 2 Computer Vision Exemplo 2: Gaussiana || F(w) || f(x) 0,1 8 0,1 8 0,1 3 0,1 3 0,08 0,08 0,03 0,03 -0,02 -0,02 1 x x2 2 1 f ( x) e 2 2 F ( w) e w w2 2 1 2 Computer Vision Exemplos Considere a função mostrada abaixo: f(x)=f(x + dx) f(x) 4 3 2 f(x0 +3 dx) f(x0 + 2dx) 4 f(x0 + dx) 3 f(x0) 2 x 0.5 0.75 1.0 1.25 0.5 0.75 1.0 1.25 x Computer Vision Exemplos f(x) = [2, 3, 4, 4] 1 F (u ) N N 1 j 2ux / N f ( x ) e x 0 1 3 1 3 j 2 0 F (0) f ( x)e f ( x )e 0 4 x 0 4 x 0 1 1 [ f (0) f (1) f (2) f (3)] (2 3 4 4) 3.25 4 4 F (0) 3.25 Computer Vision Exemplos f(x) = [2, 3, 4, 4] 1 F (u ) N N 1 j 2ux / N f ( x ) e x 0 1 3 F (1) f ( x)e j 2x / 4 4 x 0 1 1 [2e 0 3e j / 2 4e j 4e j 3 / 2 ] (2 j ) 4 4 F (1) 1 ( 2 j ) 4 Computer Vision Exemplos f(x) = [2, 3, 4, 4] 1 F (u ) N N 1 j 2ux / N f ( x ) e x 0 F (0) 3.2 5 1 F (1) ( 2 j ) 4 1 F ( 2) (1 j 0) 4 1 F (3) ( 2 j ) 4 Computer Vision Exemplos F(u) = [3.25, -0.5+j0.25, -0.25, -0.5-0.25j] F (0) 3.2 5 2 2 2 1 F (1) 4 4 1/ 2 2 1 2 0 F ( 2) 4 4 2 1 F (3) 4 4 2 2 5 4 1 4 1/ 2 1/ 2 5 4 Computer Vision Ainda há muita Teoria pra falar sobre a Transformada de Fourier! Mas já dá para brincar com imagens utilizando o com o MatLab!
Baixar