Cálculo Avançado A - Equações Diferenciais
CAPÍTULO VI – APLICAÇÕES DA TRANSFORMADA DE
LAPLACE ÀS EQUAÇÕES DIFERENCIAIS
1. EQUAÇÕES DIFERENCIAIS ORDINÁRIAS COM COEFICIENTES
CONSTANTES:
A principal aplicação da transformada de Laplace é a resolução de Equações Diferencias
Ordinárias Lineares com Coeficientes Constantes. Por exemplo, se queremos resolver uma equação
diferencial linear de segunda ordem da forma:
d2 y
d t2
(t) + α
dy
( t ) + β y ( t ) = f (t ) ,
dt
(1.1)
ou, simplesmente,
y′′( t ) + αy′( t ) + βy( t ) = f (t ) ,
(1.2)
sujeita as condições iniciais
y(0) = A
(1.3)
e
y ′(0) = B ,
(1.4)
onde α , β , A e B são constantes reais dadas. Para resolver este problema, aplicamos a transformada
de Laplace, na variável t, nos dois lados da igualdade em (1.1), usando as propriedades da
transformada de Laplace da derivada e as condições iniciais (1.3) e (1.4). Com isto, obtemos uma
equação algébrica para a determinação de ℒ {y(t )} = Y(s) , ou seja,
s 2 Y(s) − sA − B + α(sY(s) − A ) + β Y(s) = F(s) ,
(1.5)
onde ℒ {f (t )} = F(s) é conhecida. Assim,
Y(s) =
sA + B + αA
2
s + αs + β
+
F(s)
2
s + αs + β
.
(1.6)
Então, após obtida a função Y(s), aplicamos a transformada inversa de Laplace na Eq. (1.6), resultando
a função incógnita y(t). Procedendo desta forma, obtemos:
1
Cálculo Avançado A - Equações Diferenciais
é sA + B + αA ù
é
ù
1
y(t) = ℒ −1 ê
⋅ F(s)ú ,
+ ℒ −1 ê
ú
2
2
ëê s + αs + β
ûú
ëê s + αs + β ûú
(1.7)
onde a primeira parcela do lado direito desta equação é a transformada inversa de Laplace de uma
função racional (pode ser obtida pelos teoremas de Heaviside ou por completamento de quadrados) e a
segunda parcela é resolvida usando-se o teorema da convolução, sendo que a primeira função é a
transformada inversa de Laplace de uma função racional e a segunda é a função conhecida f(t) (para
maiores informações vide o capítulo 5 deste material). Em outras palavras, é razoavelmente simples
calcular a função y(t) em (1.7).
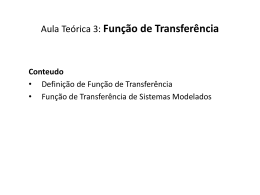
Observação 1: Em engenharia, uma equação diferencial linear é vista como um Sistema
Físico Linear (vide Fig. 1.1), onde f(t) é dita fonte, excitação ou entrada (input) do sistema e y(t) é dita
resposta ou saída (output) deste sistema. Este sistema físico pode ser, por exemplo, um circuito elétrico
ou um sistema mecânico do tipo massa - mola - amortecedor (exemplos destes tipos de sistema serão
vistos abaixo). Quando a EDO tem coeficientes constantes, dizemos que o sistema físico é invariante
no tempo, pois qualquer atraso na excitação resulta numa mesma resposta, apenas igualmente atrasada.
f(t)
Sistema
y(t)
Linear
Figura 1.1: A idéia de um Sistema Físico Linear
No exemplo em questão, como em geral, as duas parcelas do lado direito da equação (1.7) são
estudadas separadamente. A primeira parcela é denominada Resposta Transiente, pois depende apenas
das condições iniciais do sistema e tende a zero com o passar do tempo t, e a segunda parcela é dita
Resposta Permanente, pois é a resposta do sistema a fonte f(t) e permanece atuando enquanto a fonte
estiver ligada.
Observação 2: A inversão da transformada de Laplace das duas funções racionais que
aparecem na equação (1.7) pode ser feita pelo teorema de Heaviside ou por completamento de
quadrados. O método a ser adotado é escolhido pelo tipo das raízes do polinômio Q(s) = s 2 + αs + β .
Assim, se Q(s) possui duas raízes reais distintas, α1 e α 2 , usamos o teorema de Heaviside, resultando:
y( t ) =
A(α1 − α) + B α1t A(α 2 − α) + B α 2 t eα1t − eα 2 t
e +
e
+
∗ f (t) .
α1 − α 2
α 2 − α1
α1 − α 2
2
(1.8)
Cálculo Avançado A - Equações Diferenciais
Por outro lado, se Q(s) possui duas raízes reais repetidas α1 , usamos o completamento de
quadrados, resultando que:
é (s − α1)A + B + A(α + α1) ù
é
ù
1
y(t) = ℒ −1 ê
+ ℒ −1 ê
⋅ F(s)ú ,
ú
2
(s − α1) 2
êë
úû
êë (s − α1)
úû
(1.9)
ou seja,
y( t ) = A eα1t + [A(α1 + α) + B] t eα1t + t eα1t ∗ f ( t ) .
(1.10)
Por último, se Q(s) possui duas raízes complexas conjugadas, devemos usar também o
completamento de quadrados, obtendo-se que:
é
é
ù
ê
ê s+α A+B+α A ú
1
2
2 ú + ℒ −1 ê
y(t) = ℒ −1 ê
2
2
2
2
æ
öú
æ
ê s+α
ê s+α
+ çβ − α
+ çβ − α
÷
2
4
2
4 ø úû
êë
êë
è
è
(
(
)
)
2
onde λ2 = β − α
4
(
)
ù
ú
⋅ F(s)ú ,
ö
ú
÷
úû
ø
(1.11)
> 0 , pois Q(s) tem raízes complexas. Então,
é
Aα ö sen(λt ) ù − αt / 2 sen(λt )
æ
y( t ) = e − αt / 2 êA cos(λt ) + ç B +
+e
∗ f (t) .
÷
2 ø λ úû
λ
è
ë
(1.12)
Devemos observar que α > 0 é uma constante de amortecimento da solução harmônica y(t) e que λ é a
freqüência desta harmônica. Os resultados obtidos nas equações (1.8), (1.10) e (1.12) podem ser
obtidos com certa facilidade e ficam como exercício.
ì y′′( t ) + y( t ) = t
ï
.
Exemplo 1: Resolva o seguinte problema diferencial: í y(0) = 1
ï y′(0) = −2
î
Aplicando a transformada de Laplace na EDO acima, obtemos, de forma semelhante a Eq.
(1.6), que:
Y(s) =
s−2
s2 +1
+
(
1
)
s2 s2 + 1
=
s−2
æ 1
1 ö 1
s
3
÷÷ =
+ çç −
+
−
,
2
2
2
2
2
2
s +1 è s
s +1ø s
s +1 s +1
(1.13)
sendo que na equação acima foi aplicada a decomposição em frações parciais. Assim:
é1
s
3 ù
y(t) = ℒ −1 ê +
−
ú = t + cos( t ) − 3 sen( t ) .
ë s 2 s 2 + 1 s 2 + 1û
(1.14)
3
Cálculo Avançado A - Equações Diferenciais
Para mais exemplos resolvidos, vide Theory and Problems of Laplace Transforms, Schaum's
Outlines, Murray R. Spiegel, pag. 82.
Da mesma forma, a transformada de Laplace pode ser utilizada na resolução de problemas de
contorno. Por exemplo, seja a equação diferencial linear
y′′( t ) + 9 y( t ) = cos(2t ) ,
(1.15)
sujeita as condições de contorno
y(0) = 1
(1.16)
e
( 2 ) = −1 .
yπ
(1.17)
Aplicando a transformada de Laplace na EDO (1.15), obtemos, após algumas operações
algébricas, que:
Y(s) =
s + y ′(0)
2
s +9
+
(s
s
2
)(
+ 4 s2 + 9
),
(1.18)
pois y'(0) não é conhecido. Aplicando a decomposição em frações parciais na segunda parcela do lado
direito da Eq. (1.18), ou seja, fazendo
s
(s 2 + 4)(s 2 + 9)
=
As + B
s2 + 4
+
Cs + D
(1.19)
s2 + 9
e calculando a transformada inversa de Y(s), resulta que:
y( t ) =
4
y ′(0)
1
cos(3t ) +
sen(3t ) + cos(2 t ) .
5
3
5
(1.20)
A incógnita y'(0) na Eq. (1.20) é obtida calculando-se esta equação em t = π/2 e usando-se a
condição de contorno (1.17), a qual ainda não tinha sido usada no processo de resolução. Assim,
obtemos que y′(0) = 12 , ou seja, que
5
y( t ) =
4
4
1
cos(3t ) + sen(3t ) + cos(2 t ) .
5
5
5
(1.21)
Finalizando, a transformada de Laplace também pode ser utilizada na resolução de sistemas
de equações diferenciais, a qual consiste na mais poderosa aplicação desta ferramenta. Para tanto,
vejamos o seguinte exemplo.
4
Cálculo Avançado A - Equações Diferenciais
ì x ′( t ) = 2x ( t ) − 3y( t )
,
Exemplo 2: Resolva o sistema de equações diferenciais lineares í
î y′( t ) = y( t ) − 2x ( t )
sujeito as condições iniciais x(0) = 8 e y(0) = 3.
Aplicando a transformada de Laplace na variável t do sistema de EDO acima, considerando
que ℒ {x (t )} = X(s) e ℒ {y(t )} = Y(s) , resulta que:
ì(s − 2)X(s) + 3Y(s) = 8
.
í
î2X(s) + (s − 1)Y(s) = 3
(1.22)
Resolvendo simultaneamente as equações acima, usando o Método de Cramer, temos:
8 3
3 s −1
8s − 17
8s − 17
5
3
X(s) =
=
+
=
=
s−2 3
s 2 − 3s − 4 (s + 1)(s − 4) s + 1 s − 4
2
s −1
(1.23)
e
s−2
2
Y(s) =
s−2
2
8
3
3s − 22
3s − 22
5
2
=
−
,
=
=
3
s 2 − 3s − 4 (s + 1)(s − 4) s + 1 s − 4
s −1
(1.24)
onde foi utilizado o teorema de Heaviside. Assim, aplicando a transformada inversa de Laplace,
obtemos que x ( t ) = 5e − t + 3e 4 t e y( t ) = 5e − t − 2e 4 t .
2. RESOLUÇÃO DE SISTEMAS FÍSICOS:
APLICAÇÃO À CIRCUITOS ELÉTRICOS:
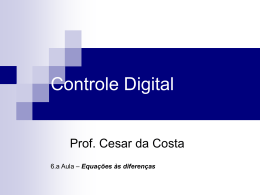
Seja um simples circuito RCL, como no desenho abaixo (figura 2.1), onde vemos uma
resistência R (em ohms), uma indutância L (em henrys), uma capacitância C (em farads) e um gerador
ou bateria, fornecendo uma força eletromotriz E(t). Quando a chave K é fechada, ou seja, o circuito é
fechado, uma carga q(t) (em coulombs) fluirá nas placas do capacitor, gerado uma corrente
I( t ) =
dq
( t ) (em amperes). O tempo t é medido em segundos. Devemos lembrar que podemos definir
dt
a diferença de potencial no resistor, indutor, capacitor e gerador, respectivamente, por:
5
Cálculo Avançado A - Equações Diferenciais
dq
1
d 2q
dI
VR = RI( t ) = R ( t ) , VL ( t ) = L ( t ) = L
( t ) , VC ( t ) = q ( t ) e VG ( t ) = − E( t ) .
2
dt
C
dt
dt
Assim, pela lei de Kirchoff, temos que:
L
d 2q
dt 2
(t) + R
1
dq
( t ) + q (t ) = E( t ) ,
C
dt
(2.1)
(t ) + R
dE
1
dI
(t) .
( t ) + I( t ) =
dt
C
dt
(2.2)
ou
L
d 2I
dt
2
Através do uso da transformada de Laplace, podemos resolver as equações diferenciais acima,
sujeitas a condições iniciais do tipo carga e corrente conhecidas em t = 0.
Figura 2.1: Um circuito elétrico RCL.
Exemplo 1: Um indutor de 2 henrys, um resistor de 16 ohms e um capacitor de 0.02 farads
estão conectados em série à uma força eletromotriz de E(t) volts. Em t = 0, a carga sobre o capacitor e
a corrente no circuito são nulas. Encontre a carga e a corrente num tempo t > 0 qualquer, se: (a) E(t) =
300 V; (b) E(t) = 100 sen(3t) V.
Sejam q(t) e I(t) a carga e a corrente, respectivamente, no circuito, num dado tempo t. Assim,
pela lei de Kirchoff, temos a seguinte EDO,
2
1
dI
q(t ) = E(t ) ,
( t ) + 16 I( t ) +
0,02
dt
(2.3)
sujeita as condições iniciais:
q(0) = 0
(2.4)
e
6
Cálculo Avançado A - Equações Diferenciais
I(0) = q ′(0) = 0 .
(2.5)
Usando a transformada de Laplace, onde Q(s) = ℒ{q(t)} e F(s) = ℒ{E(t)}, temos que:
(s 2Q(s) − sq(0) − q′(0))+ 8(sQ(s) − q(0)) + 25Q(s) = 12 F(s) .
(2.6)
Usando as condições iniciais (2.4) e (2.5), isolando Q(s) e aplicando a transformada inversa
de Laplace, obtemos que:
q(t ) =
ü
F(s)
1 -1 ì
ℒ í
ý.
2
2
s
+
8
s
+
25
þ
î
(2.7)
Vamos, então, calcular q(t) e I(t) em cada uma das alternativas para E(t):
a) Para E(t) = 300V, resolveremos a Eq. (2.7) usando a decomposição em frações parciais e o
completamento de quadrados, ou seja,
ìï
üï
ì
ü
ì
1
(s + 4) + 4 üï
-1 ï A B(s + 4) + C ï
-1 ï1
=
150
ℒ
=
6
ℒ
+
−
q(t) = 150 ℒ -1 í
ý
í
ý
í
ý=
ïî s(s 2 + 8s + 25) ïþ
ïî s (s + 4) 2 + 9 ïþ
ïî s (s + 4) 2 + 9 ïþ
= 6 − e −4 t [6 cos(3t ) + 8 sen(3t )] .
(2.8)
E,
I (t ) =
dq
( t ) = 50 e − 4 t sen(3t ) .
dt
(2.9)
b) Agora, se E( t ) = 100 sen(3t ) V, também resolveremos a Eq. (2.7) usando a decomposição em
frações parciais e o completamento de quadrados, ou seja,
ìï
üï
ìï As + B C(s + 4) + D üï
1
= 150 ℒ -1 í
+
q(t) = 150 ℒ -1 í
ý
ý
ïî (s 2 + 9)(s 2 + 8s + 25) ïþ
ïî s 2 + 9 (s + 4) 2 + 9 ïþ
=
{
[
]
[
]}
75 -1 ìï - s + 2 (s + 4) + 2 üï 25
ℒ í
2 sen(3t ) e − 4 t + 1 + 3 cos(3t ) e − 4 t − 1 .
+
ý=
2
2
52
ïî s + 9 (s + 4) + 9 ïþ 52
(2.10)
Derivando q(t), obtemos I(t), ou seja,
I (t ) =
75
[2 cos(3t ) + 3 sen(3t )] − 25 e − 4t [17 sen(3t ) + 6 cos(3t )] .
52
52
(2.11)
Para mais exemplos e exercícios, vide Theory and Problems of Laplace Transforms, Schaum's
Outlines, Murray R. Spiegel, pags. 92 e 106.
7
Cálculo Avançado A - Equações Diferenciais
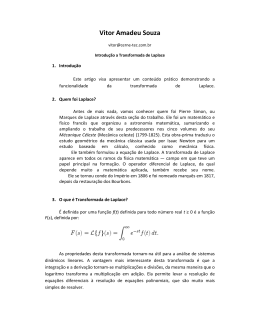
APLICAÇÃO À MECÂNICA:
Vamos considerar uma mola comum resistente a compressão e a
extensão. Vamos supor que esta mola está suspensa verticalmente, que
sua extremidade superior está presa em um suporte fixo e que na sua
extremidade inferior está fixado um corpo de massa m muito maior que a
massa da mola, a ponto da massa da mola poder ser desprezada (vide
figura 2.2 abaixo). Puxando esta massa m verticalmente para baixo uma
certa distância e, então, soltando-a, este corpo passará a se movimentar.
Sabemos, pela segunda lei de Newton, que a resultante das
forças que atuam sobre um corpo é igual a Força de Inércia, ou seja, o
produto da massa pela aceleração deste corpo. Analisemos as forças que
Figura 2.2: Um sistema
massa-mola-amortecedor
atuam sobre este corpo de massa m:
1) Força da gravidade: F1 = m.g , onde g é a aceleração da gravidade.
2) Força da mola: É a força exercida pela mola quando deformada. Esta força é proporcional a
deformação (quando mais rígida a mola, maior a constante de proporcionalidade k). Quando o corpo
está em repouso (posição de equilíbrio), esta mola tem uma alongamento s 0 devido a força da
gravidade que atua sobre o corpo. Esta força age no sentido para cima, contrário à F1 e é igual em
módulo à ks 0 = m.g .
Chamamos de x(t) o deslocamento instantâneo da massa m num tempo t a partir de sua
posição de equilíbrio, com sentido positivo voltado para baixo. Assim, pela lei de Hooke, a força da
mola correspondente a um deslocamento x(t) é a resultante da força da mola na posição de equilíbrio e
a força causada pelo deslocamento, ou F2 = − ks 0 − kx (t ) .
Assim a força que atua sobre o sistema é dada por:
F = F1 + F2 = mg − ks 0 − kx (t ) = mg − mg − kx (t ) = − kx (t ) .
(2.12)
Logo, se o amortecimento do sistema é tão pequeno que pode ser desprezado, segue que
− kx ( t ) é a resultante de todas as forças que agem sobre o corpo. Assim, de acordo com a lei de
Newton: "Força é igual a massa vezes a aceleração", temos que:
m
d2x
dt
2
(t ) = −k x (t )
ou
m x ′′( t ) + k x ( t ) = 0 .
(2.13)
8
Cálculo Avançado A - Equações Diferenciais
3) Força de Amortecimento: Se levarmos em conta o amortecimento viscoso do sistema, temos ainda
no somatório das forças que atuam sobre o corpo uma força de amortecimento que possui sentido
contrário ao movimento, e que supomos proporcional a velocidade do corpo. Para pequenas
velocidades, esta hipótese constitui em uma boa aproximação. Assim a força de amortecimento é da
forma F3 = β x ′( t ) .
Logo, a equação do movimento da mola pode ser escrita como:
m
d2x
dt
2
( t ) = − kx ( t ) − β
dx
(t)
dt
ou
m x ′′( t ) + β x ′( t ) + k x ( t ) = 0 ,
(2.14)
onde a constante de proporcionalidade β é chamada de constante de amortecimento.
Podemos, ainda, ter uma força externa dependente de t, denotada aqui por f(t), atuando sobre
o sistema. Neste caso, temos que
m
d2x
dt
2
( t ) = −kx ( t ) − β
dx
(t ) + f (t )
dt
ou
m x ′′( t ) + β x ′( t ) + k x ( t ) = f ( t ) .
(2.15)
Através do uso da transformada de Laplace, podemos resolver as equações diferenciais acima,
sujeitas a vários tipos de condições iniciais, que são de interesse físico. Por exemplo,
Exemplo 2: Sabe-se que um peso de 5 kg estica uma mola de 1/12 m. O amortecimento
exerce uma força de 0.02 kg para uma velocidade de 1/6 m/s. Um peso de 613,125 g é ligado à mola e
solto de uma posição 1/6 m abaixo da posição de equilíbrio. Determine a posição deste corpo, em
relação à posição de equilíbrio, em um dado instante t.
Pelo que vimos acima, a massa do corpo será de:
m=
P 0.613125kg 1 kg.s 2
=
=
g
16 m
9.81m / s 2
(2.16)
e as constantes da mola e de amortecimento assumirão os valores:
k=
P
5 kg
kg
=
= 60
1
s0
m
12 m
(2.17)
Força
0.02 kg
kg.s
=
= 0.12
.
1
Velocidade
m
/
s
m
6
(2.18)
e
β=
Consequentemente, pela fórmula (2.14), temos que
9
Cálculo Avançado A - Equações Diferenciais
1
x ′′( t ) + 0.12 x ′( t ) + 60 x ( t ) = 0 ,
16
(2.19)
onde x é medido em metros e t em segundos. As condições iniciais são x (0) = 1 6 e x ′(0) = 0 . A
equação (2.19) será resolvida usando a transformada de Laplace na variável t. Assim,
[
]
1 2
s X(s) − s x (0) − x ′(0) + 0.12[sX (s) − x (0)] + 60X(s) = 0
16
(2.20)
ou, multiplicando a Eq. (2.20) por 16 e usando as condições iniciais,
sù
1ù
1
s + 1.92
é 2
é
.
êës X(s) − 6 úû + 1.92 êësX (s) − 6 úû + 960X(s) = 0 Þ X(s) = 6 2
s + 1.92s + 960
(2.21)
Finalmente, x(t) é reconstruído utilizando-se a transformada inversa de Laplace e a técnica do
completamento de quadrados, ou seja,
x(t) =
1 −1 é (s + 0.96) + 0.96 ù e −0.96 t
ℒ ê
ú≅
6
6
êë (s + 0.96)2 + 959.0784 úû
0.96
é
ù
êëcos(30.97 t ) + 30.97 sen(30.97 t )úû .
(2.22)
O mesmo raciocínio é aplicado à molas com deslocamento horizontal. Para exemplos desta
situação, vide Theory and Problems of Laplace Transforms, Schaum's Outlines, Murray R. Spiegel,
pag. 88. A transformada de Laplace também pode ser aplicada a problemas de vibrações (osciladores
harmônicos), de vigas (problemas de contorno), de difusão (equações diferenciais parciais) e
problemas de transporte (equações integro-diferenciais), entre outros. Para exemplos destes problemas,
vide Theory and Problems of Laplace Transforms, Schaum's Outlines, Murray R. Spiegel, capítulos 3 e
8, Equações Diferenciais Elementares e Problemas de Valores de Contorno, William E. Boyce e
Richard C. Diprima, seções 3.7 - 3.8 e capítulo 10, ou ainda a tese de doutorado de Augusto V.
Cardona, pelo PROMEC - UFRGS, intitulada "Método Genérico de Solução Analítica para
Aproximações da Equação Linear de Transporte", Porto Alegre (1996).
3. EQUAÇÕES DIFERENCIAIS ORDINÁRIAS COM COEFICIENTES
VARIÁVEIS:
A Transformada de Laplace também pode ser usada para resolver algumas EDOs com
coeficientes variáveis. Num caso particular, o método se mostra bastante útil quando os termos da
10
Cálculo Avançado A - Equações Diferenciais
EDO tem o formato t m y (n ) (t ) , com m e n naturais, cuja transformada de Laplace é dada por
(− 1)m
dm
ds
m
[s Y(s) − s
n
n −1
]
y(0) − K − sy ( n − 2) (0) − y ( n −1) (0) . Vejamos um exemplo:
ìty′′( t ) + 2 y′( t ) + ty( t ) = 0
ï
Exemplo 1: Resolva o seguinte problema diferencial: í y(0) = 1
.
ï y(π) = 0
î
Aplicando a transformada de Laplace na equação acima, obtemos que:
−
[
]
d 2
d
s Y(s) − sy(0) − y′(0) + 2[sY (s) − y(0)] − Y(s) = 0 ,
ds
ds
(3.1)
ou, usando a condição y(0) = 1 e considerando que y'(0) é constante,
− s 2 Y′(s) − 2sY(s) + 1 + 2sY (s) − 2 − Y′(s) = 0 Þ − (s 2 + 1)Y′(s) − 1 = 0 Þ Y′(s) = −
1
s2 +1
.
(3.2)
Integrando a última igualdade da Eq. (3.2) em relação à variável s, obtemos que:
Y(s) = A − arctg(s) =
π
æ1ö
− arctg(s) = arctgç ÷ ,
2
èsø
(3.3)
pois, pela propriedade 11, seção 4, da transformada de Laplace,
lim Y(s) = 0 e, então, A =
s → +∞
π
.
2
Assim, aplicando a transformada inversa de Laplace e usando o exemplo 18, seção 4 do capítulo V,
reconstruímos a solução y(t), dada por:
y( t ) =
sen( t )
.
t
(3.4)
Devemos observar que esta solução satisfaz a condição de contorno y(π) = 0 , ainda não usada.
Para mais exemplos, vide Theory and Problems of Laplace Transforms, Schaum's Outlines,
Murray R. Spiegel, capítulo 3.
11
Baixar