Capı́tulo 6
Autovalores e Autovetores
6.1
Introdução
Neste capı́tulo, apresentaremos alguns dos métodos utilizados para a solução do problema do
autovalor, i.e., o sistema de n equações lineares
Ax = λx
(6.1)
para o qual procuramos um vetor solução x tal que xi = 0 para pelo menos algum i, ou seja, uma
solução não-trivial. Para que tal seja possı́vel, é necessário que
det(A − λI) = 0
(6.2)
a qual é uma equação polinomial de grau n na variável λ, chamada de equação caracterı́stica de
A; o polinômio det(A − λI) é chamado de polinômio caracterı́stico de A.
As n raı́zes de (6.2) são chamadas de autovalores, raı́zes latentes ou valores caracterı́sticos de
A. A cada raiz λ corresponde um vetor x ∈ ICn = 0 que satisfaz a equação (6.1), o qual é chamado
de autovetor, vetor latente ou vetor caracterı́stico de A. Note que, se x é um autovetor de A, então
kx, onde k ∈ IR, também é, pois
Akx = kAx = λkx = kλx.
Costumeiramente os autovetores são normalizados, i.e. || x || = 1 em alguma norma escolhida (o
que pode ser feito pela relação acima).
Se todas as raı́zes de (6.2) são distintas entre si, então isso implica em que a matriz A apresenta
um conjunto completo de autovetores linearmente independentes (L.I.). No entanto, mesmo para
casos em que os autovalores não são todos distintos, podemos encontrar um conjunto completo de
autovetores L.I.
Podemos também calcular os autovalores da matriz inversa de A, A−1 , a partir dos autovalores
de A. Se multiplicarmos a equação (6.1) à esquerda por A−1 , temos
x = λA−1 x
ou
A−1 x =
1
x.
λ
(6.3)
Essa última equação nos diz que λ1 é autovalor de A−1 , onde λ é um autovalor de A, com o
autovetor x correspondente.
Problemas envolvendo autovalores e autovetores surgem em inúmeras aplicações, como podemos ver nos exemplos que seguem, conforme apresentados em [6].
110
Introdução ao Cálculo Numérico
Autovalores e Autovetores
Exemplo 6.1 O estudo das vibrações de sistemas dinâmicos e de estruturas requer a solução de
problemas de autovalores e autovetores. Considere, apenas para fins de explanação, o problema
de se determinar as vibrações de pequenas partı́culas presas por um fio uniforme, sem peso, ao
→
−
qual é aplicada uma força F nas extremidades (cf. a figura 6.1) e no qual desconsidera-se a ação
da gravidade. As partı́culas encontram-se a distâncias iguais entre si e as vibrações das mesmas
são consideradas pequenas e perpendiculares à posição de descanso do fio. Escrevendo as equações
Figura 6.1: O problema das vibrações.
diferenciais para as forças atuantes em cada partı́cula, temos:
d2 x1
dt2
d2 x2
m2 2
dt
d2 x3
m3 2
dt
d2 x4
m4 2
dt
m1
=
=
=
=
x2 − x1
x1
+F
h
h
x3 − x2
x2 − x1
+F
−F
h
h
x3 − x4
x3 − x2
−F
−F
h
h
x4
x3 − x4
−F
+F
h
h
−F
Introduzindo a notação
x
di
= (x1 , x2 , x3 , x4 )T
mi h
, i = 1, 2, 3, 4
=
F
podemos escrever o sistema de equações diferenciais acima na forma matricial
D
onde D é a matriz diagonal
D=
d2 x
= Tx
dt2
(6.4)
d1
d2
d3
d4
e T é a matriz tridiagonal
−2
1
0
0
1 −2
1
0
.
T =
0
1 −2
1
0
0
1 −2
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
111
Introdução ao Cálculo Numérico
Autovalores e Autovetores
Quando as partı́culas vibram em fase ou em direções opostas, i.e., em modo normal, então a
condição
d2 x
= −w2 x, w ∈ IR
(6.5)
dt2
é satisfeita. Substituindo a equação (6.5) em (6.4), obtemos o problema de autovalor
Dwi2 xi = −T xi ,
i = 1, 2, 3, 4
(6.6)
para as freqüências de vibração w1 , w2 , w3 e w4 e os modos normais correspondentes, i.e., os
autovetores x1 , x2 , x3 e x4 .
Aparentemente, se isolarmos x no lado direito da equação (6.6), obterı́amos o que se chama
de problema generalizado do autovalor, cuja forma geral é
(A − λB)x = 0
onde A e B são matrizes de ordem n. Porém, se introduzirmos o vetor
y = D1/2 x
o que é possı́vel, já que os elementos da diagonal de D são positivos, por definição, então podemos
escrever (6.6) como
D−1/2 T D−1/2 yi = −wi2 yi
o qual recai na forma 6.1.
Exemplo 6.2 A teoria de Leontief sobre a compra e a venda de produtos é muito utilizada no
campo de estudo da macroeconomia; como exemplo, consideramos as vendas e compras de produtos
num setor industrial.
Seja bij as vendas da indústria i para a indústria j; bii representa os bens produzidos pela
indústria i e retidos por ela própria. As vendas de bens da indústria i para o mercado é denotada
por yi e o total de bens produzidos por xi . Então,
bij
(6.7)
xi = yi +
j
A fim de definirmos bij , assume-se que as vendas da indústria i para a j estão em proporção
constante à produção da indústria j, i.e.
bij = aij xj
onde aij são ditos coeficientes de entrada. Em uma situação estática, podemos escrever, a partir
de (6.7),
x = y + Ax
(6.8)
onde x = (x1 , x2 , . . . , xn )T e y = (y1 , y2 , . . . , yn )T e A é matriz de ordem n cujos elementos (i, j)
são os coeficientes de entrada aij . Ora, a equação (6.8) pode ser reescrita como
(I − A)x = y
(6.9)
onde I − A é chamada de matriz de Leontief. A equação (6.9) pode ser resolvida calculandose os autovalores e autovetores de A. Sua utilidade reside no fato de que, com ela, é possı́vel
determinar-se a quantidade de bens produzidos (x) necessários para satisfazer a uma demanda
final (y), pré-estabelecida.
Se a produção e a demanda não se encontram em equilı́brio, então devemos considerar um
modelo dinâmico, que leve em consideração a taxa de variação da produção. Nesse caso, usualmente considera-se que a produção em cada indústria varia a uma taxa proporcional à diferença
entre os nı́veis de venda e de produção. Daı́,
dx(t)
= D ((A − I)x(t) + y(t))
dt
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
(6.10)
112
Introdução ao Cálculo Numérico
Autovalores e Autovetores
onde D é uma matriz diagonal de ordem n, cujos elementos dii representam os coeficientes de
reação das indústrias.
A equação (6.10) substitui nesse caso a equação (6.8) e representa o comportamento dinâmico
do sistema econômico em estudo. Uma das questões a serem estudadas, nesse caso, é se o sistema
é estável, determinando-se os autovalores e autovetores da matriz D(A − I). Particularmente,
procura-se determinar se esses autovalores tem parte real positiva pois, como as soluções do
sistema de equações diferenciais (6.10) são da forma eλi t , isso indicaria uma instabilidade, já
que a demanda x(t) cresceria exponencialmente com o tempo.
A seguir, apresentaremos dois importantes teoremas, os quais nos permitirão desenvolver
técnicas de determinação de autovalores e autovetores para um tipo especı́fico de matrizes.
6.2
Teoremas de limites sobre autovalores
Teorema 6.2.1 Discos de Gerschgorin: Seja A uma matriz de ordem n, e di , i = 1, 2, . . . , n
os discos cujos centros são os elementos aii e cujos raios ri são dados por
ri =
n
|aij |,
i = 1, 2, . . . , n.
j=1
j=i
Seja D a união de todos os discos di . Então, todos os autovalores de A encontram-se contidos em
D.
Prova: Seja λ um autovalor de A e x um autovetor correspondente, tal que maxi | xi | = 1. Então,
λx = Ax
de onde
(λ − aii )xi =
n
aij xj ,
i = 1, 2, . . . n
j=1
j=i
Supondo que | xk | = 1, então
| λ − akk | ≤
n
| akj || xj |
j=1
j=i
≤
n
| akj | = rk
j=1
j=i
i.e., o autovalor λ está contido no disco dk e, como λ é arbitrário, então todos os autovalores de A
devem estar contidos na união de todos os discos, D. ♦
O exemplo a seguir apresenta uma aplicação do teorema 6.2.1.
Exemplo 6.3 A matriz
−1
0 −1
4 −1
A = −1
−1 −2 10
tem como seus autovalores λ1 = 10, 3863, λ2 = 3, 8037 e λ3 = 0, 8100. Calculando os discos de
Gerschgorin, temos:
d1
= |z − 1| < |0| + | − 1| = 1
d2
d3
= |z − 4| < | − 1| + | − 1| = 2
= |z − 10| < | − 1| + | − 2| = 3
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
113
Introdução ao Cálculo Numérico
Autovalores e Autovetores
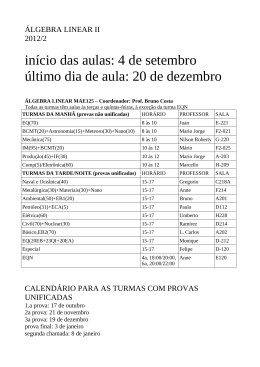
Como todos os autovalores de A são reais, e observando (veja a figura 6.2) que em cada disco
devemos ter um autovalor, podemos dizer que:
• existe um autovalor, λ1 , que está dentro do disco centrado em 10 e raio 3 e, de fato, 7 <
10, 3863 < 13;
• existe um autovalor, λ2 , que está dentro do disco centrado em 4 e raio 2 e, realmente,
2 < 3, 8037 < 6;
• existe um autovalor, λ3 , que está dentro do disco centrado em 1 e raio 1 e, com efeito,
0 < 0, 81 < 2;
A figura 6.2 ilustra esse resultado.
Figura 6.2: Discos de Gerschgorin
Uma conseqüência do teorema de Gerschgorin é a determinação do maior disco que contém
todos os autovalores de A. Podemos obter, a partir dos discos, os extremos ao longo do eixo dos
números reais, i.e. o intervalo [α, ω] tal que
α = min{aii − ri },
i
ω = max{aii + ri },
i
i = 1, 2, . . . , n
(6.11)
e o maior disco é justamente aquele com centro (α + ω)/2 e raio (α + ω)/2. No caso em que todos
os autovalores são reais, basta então considerar o intervalo [α, ω].
Teorema 6.2.2 Maior e menor autovalor: Seja A uma matriz real simétrica de ordem n, e
x ∈ IC um vetor arbitrário. Então,
λ1 = max
x=0
xT Ax
,
xT x
λn = min
x=0
xT Ax
xT x
onde os autovalores são ordenados tais que λ1 ≥ λ2 ≥ . . . ≥ λn .
A razão
xT Ax
, x = 0
(6.12)
xT x
é chamada de quociente de Rayleigh correspondente a x e, juntamente com o teorema 6.2.2, nos
permitirá estimar de forma bastante rápida um autovalor de uma matriz simétrica, conforme
veremos na seção 6.5.
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
114
Introdução ao Cálculo Numérico
6.3
Autovalores e Autovetores
Cálculo de autovalores e autovetores via determinantes
Já vimos que, por definição, os autovalores de uma matriz A são as raı́zes do polinômio caracterı́stico de A. Evidentemente, para matrizes de ordem n > 4, não é aconselhável que se utilize a
equação (6.2) para se obter o polinômio caracterı́stico, por duas razões:
1. o cálculo de determinantes de ordem superior a 4 envolve considerável custo computacional;
2. o polinômio caracterı́stico de uma matriz grande pode ser instável numericamente.
No entanto, algumas aplicações de engenharia, fı́sica e outros campos do conhecimento envolvem
a determinação de autovalores de matrizes de ordem n = 2 ou n = 3 e, nesse caso, é possı́vel obterse os autovalores extraindo as raı́zes do polinômio caracterı́stico, conforme mostra o exemplo a
seguir.
Exemplo 6.4 Seja a matriz
2
5
3 −4
.
O seu polinômio caracterı́stico é
2−λ
5
p(λ) = det(A − λI) = 3
−4 − λ
= (2 − λ)(−4 − λ) − 15
ou p(λ) = λ2 + 2λ − 23, cujas raı́zes são λ1 = 3, 8990 e λ2 = −5, 8990.
Para se determinar os autovetores, utiliza-se a equação (6.1) para cada autovalor λi , na forma
(A − λi I)xi = 0, como segue:
Exemplo 6.5 Calcule os autovetores do exemplo 6.4.
Solução: Para o autovalor λ1 = 3, 8990, escrevemos
(A − 3, 8990I)x1
7, 8990
5
(x1 )1
(x1 )2
3 1, 8990
de onde obtemos
x1 =
k
−1, 5798k
=
=
0
0
0
,
k = 0
O autovetor correspondente a λ2 = −5, 8990 é obtido de forma similar:
(A + 5, 8990I)x1 =
−1, 8990
5
(x2 )1
=
(x2 )2
3 −7, 8990
de onde obtemos
x2 =
k
0, 3798k
0
0
0
,
k = 0
Computacionalmente, no entanto, podemos estimar o autovetor correspondente a um autovalor
utilizando os métodos da potência com translação da origem (seção 6.5.2) ou da iteração inversa
com translação da origem (seção 6.5.3).
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
115
Introdução ao Cálculo Numérico
6.4
Autovalores e Autovetores
Autovalores de uma matriz tridiagonal simétrica
Em muitas aplicações surgem matrizes tridiagonais simétricas, das quais necessitamos extrair
autovalores e/ou autovetores. Por exemplo, ao aproximarmos a equação diferencial parcial
∂2u
∂u
=
∂t
∂x2
por diferenças finitas, obtemos uma matriz
−2
1
0
0
1 −2
1
0
0
1 −2
1
0
0
1 −2
a qual apresenta aquela caracterı́stica.
De forma geral, consideramos uma matriz
a1 b 1
b 1 a2
T = 0 ...
. .
.. . .
0 ...
T de ordem n,
0
..
.
..
..
.
.
0
...
0
..
..
.
.
..
.
0
..
. bn−1
bn−1
an
e chamamos de Tr a matriz principal de ordem r de T , i.e.
a1
a1 b 1
T 1 = a1 , T 2 =
, T3 = b1
b 1 a2
0
b1
a2
b2
(6.13)
0
b2 ,
a3
...
Escrevendo as equações caracterı́sticas p1 (λ), p2 (λ) e p3 (λ) das matrizes T1 , T2 e T3 , obtemos:
p1 (λ)
p2 (λ)
p3 (λ)
=
det(T1 − λI) = a1 − λ
(6.14)
b21
b21
=
=
det(T2 − λI) = (a2 − λ)(a1 − λ) − = (a2 − λ)p1 (λ) −
(6.15)
2
2
det(T3 − λI) = (a3 − λ) (a2 − λ)(a1 − λ) − b1 (a3 − λ) − b2 (a1 − λ) =
=
(a3 − λ)p2 (λ) − b22 p1 (λ)
(6.16)
de onde podemos escrever, generalizando para r,
pr (λ) = (ar − λ)pr−1 (λ) − b2r−1 pr−2 (λ),
r = 2, 3, . . . , n,
p0 (λ) = 1,
(6.17)
A equação (6.17) nos permite avaliar o polinômio caracterı́stico da matriz T de forma bastante
eficiente; no entanto, estamos preocupados em obter os autovalores de T , ou as raı́zes de pn . O
teorema a seguir nos permitirá escrever um algoritmo bastante eficiente para se extrair alguns ou
todos os autovalores de T .
Teorema 6.4.1 Seqüência de Sturm: Se a matriz tridiagonal (6.13) é não-reduzı́vel 1 , então
os r − 1 autovalores µ da matriz Tr−1 separam estritamente os r autovalores λ da matriz Tr :
λr < µr−1 < λr−1 < µr−2 < · · · < λ2 < µ1 < λ1 .
Mais ainda, se s(λ) representa o número de trocas de sinal na seqüência
{p0 (λ), p1 (λ), . . . , pn (λ)}
então s(λ) é igual ao número de autovalores de T menores do que λ, onde pr (λ) é dado por (6.17)
e assume-se que pr (λ) tem o sinal oposto de pr−1 (λ) se pr (λ) = 0.
1 Uma matriz A é dita não-reduzı́vel se os elementos da diagonal da matriz triangular superior R, resultante de
sua fatoração no produto QR, são todos não-nulos, onde Q é uma matriz ortogonal (i.e. QT Q = I).
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
116
Introdução ao Cálculo Numérico
Autovalores e Autovetores
O teorema 6.4.1 é extremamente importante: ele nos diz que, se tivermos os n autovalores µ
de uma matriz triadiagonal Tn (de ordem n), então entre cada par de autovalores consecutivos
µ (com exceção do menor e do maior), existe um e apenas um autovalor λ da matriz tridiagonal
Tn+1 (de ordem n + 1), obtida acrescentando-se uma linha e uma coluna à matriz Tn . Devido à
essa caracterı́stica, podemos utilizar o algoritmo da bissecção (ver algoritmo 2.2.1), juntamente
com a equação (6.17), para obtermos rapidamente, e com segurança, um autovalor de Tn+1 , à
partir de um intervalo que é um par de autovalores consecutivos de Tn .
Para obter-se o menor e o maior autovalores de Tn+1 , utilizamos o teorema de Gerschgorin mais especificamente, calculamos o maior intervalo que engloba todos os autovalores, com a equação (6.11). Assim, o menor autovalor é calculado usando-se como estimativa inicial para o método
da bissecção o intervalo [α, µr−1 ]; para o maior autovalor, utiliza-se o intervalo [µ1 , ω].
Os algoritmos 6.4.1, 6.4.2 e 6.4.3 combinam as idéias apresentadas acima. Da maneira como o
algoritmo 6.4.3 é apresentado, todos os autovalores são obtidos; no entanto, simples modificações
do mesmo nos permitem obter apenas alguns autovalores (por exemplo, o maior e o menor, ou os
dois maiores, etc.).
O exemplo 6.6 demonstra uma situação tı́pica, resolvido utilizando-se esses algoritmos.
Algoritmo 6.4.1 Avalia polinômio caracterı́stico de uma matriz
tridiagonal simétrica
function pol carac trid(input: x, a, b; output: p)
% a e b são os vetores contendo os elementos da
% diagonal e subdiagonal, respectivamente,
% da matriz tridiagonal
p0 ← 1
p 1 ← a1 − x
p ← p1
for r ← 2, 3, . . . , n do
p ← (ar − x)p1 − b2r−1 p0
p0 ← p1
p1 ← p
endfor
endfunction
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
117
Introdução ao Cálculo Numérico
Autovalores e Autovetores
Algoritmo 6.4.2 Método da bissecção com polinômio caracterı́stico
proc bissecção trid(input: a, b, α, β, kmax , δ, &; output: χ)
% a e b são os vetores contendo os elementos da
% diagonal e subdiagonal, respectivamente,
% da matriz tridiagonal
u ← pol carac trid(α, a, b)
v ← pol carac trid(β, a, b)
e←β−α
if (sign(u) = sign(v)) then
“não pode proceder”
else
k←1
w←1
while ((k ≤ kmax ) AND (| e | ≥ δ) AND (| w | ≥ &))
e ← e/2
χ←α+e
w ← pol carac trid(χ, a, b)
if (sign(w) = sign(u)) then
β←χ
v←w
else
α←χ
u←w
endif
k ←k+1
endwhile
endif
endproc
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
118
Introdução ao Cálculo Numérico
Autovalores e Autovetores
Algoritmo 6.4.3 Autovalores
simétrica
de
uma
matriz
tridiagonal
proc autovalores tridiagonal(input: a, b, n; output: λ)
% Calcula os raios dos discos de Gerschgorin, cada qual com centro a(i)
r1 ← | b1 |
for i ← 2, 3, . . . , n − 1 do
ri ← | bi−1 | + | bi |
endfor
rn ← | bn−1 |
% Calcula o intervalo [α, ω] na reta dos reais
% contendo os autovalores
α ← minni=1 (ai − ri )
ω ← maxni=1 (ai + ri )
% Calcula os autovalores, iniciando com o autovalor
% de T1 = [a1 ], µ = a1
µ1 = a1
for i ← 2, 3, . . . , n do
% Calcula os autovalores de Ti
% a. entre α e µ1
call bissecção trid(a, b, α, µ1 , kmax , δ, &, λ1 )
% b. autovalores entre µ1 e µi−1
for j ← 1, 2, . . . , i − 2 do
call bissecção trid(a, b, µj , µj+1 , kmax , δ, &, λj+1 )
endfor
% c. entre µi−1 e ω
call bissecção trid(a, b, µi−1 , ω, kmax , δ, &, λ1 )
µ←λ
endfor
λ←µ
endproc
Exemplo 6.6 Seja a matriz tridiagonal
2 −1
−1
2 −1
T =
−1
2 −1
−1
2
a qual pode ser representada de forma compacta através dos vetores
a = (2, 2, 2, 2)T
e
b = (−1, −1, −1)T
Para se obter os autovalores de T , iniciamos com a matriz
T 1 = a1 = 2
a qual tem como seu único autovalor µ1 = a1 = 2. Além disso, calculamos os extremos do intervalo
de Gerschgorin, α = 0 e ω = 6, através da equação (6.11).
Agora, precisamos calcular os dois autovalores λ da matriz
a1 b 1
2 −1
=
T2 =
b 1 a2
−1
2
os quais, pelos teoremas de Gerschgorin e 6.4.1, satisfazem
α < λ2 < µ1 < λ1 < ω
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
119
Introdução ao Cálculo Numérico
Autovalores e Autovetores
√
Estipulando-se como tolerâncias de convergência para o método da bisseção δ = & = ε e um
máximo de 200 iterações, λ2 é obtido em 2 iterações utilizando-se como intervalo de busca [α, µ1 ] =
[0, 2], resultando no valor λ2 = 1. O autovalor λ1 também é obtido em 2 iterações, usando-se como
intervalo de busca [µ1 , β] = [2, 6], com o qual obtém-se λ1 = 3.
Antes de procedermos ao cálculo dos autovalores de T3 , fazemos uma cópia dos λ, armazenandoos em µ; assim, temos µ1 = 3 e µ2 = 1.
Procedemos, então, com o cálculo dos autovalores λ de T3 ; para tanto, utilizamos os intervalos
de busca
• [α, µ2 ] = [0, 1] para calcular o autovalor λ3 ;
• [µ2 , µ1 ] = [1, 3] para calcular o autovalor λ2 ;
• [µ1 , ω] = [3, 6] para calcular o autovalor λ1 .
Os autovalores λ3 , λ2 e λ1 são então obtidos com o método da bissecção, utilizando-se as mesmas
tolerâncias especificadas anteriormente, resultando em λ3 = 0, 5858, λ2 = 2 e λ1 = 3, 4142, obtidos
em 27, 2 e 27 iterações respectivamente.
Finalmente, basta calcularmos os autovalores de T4 . Procedendo de forma similar, fazemos
µ3 = 0, 5858, µ2 = 2 e µ1 = 3, 4142 e estipulamos os intervalos de busca
• [α, µ3 ] = [0, 0, 5858] para calcular o autovalor λ4 ;
• [µ3 , µ2 ] = [0, 5858, 2] para calcular o autovalor λ3 ;
• [µ2 , µ1 ] = [2, 3, 4142] para calcular o autovalor λ2 ;
• [µ1 , ω] = [3, 4142, 6] para calcular o autovalor λ1 .
de onde, após aplicarmos o algoritmo da bissecção a cada um desses intervalos, obtemos os
autovalores de T4 ≡ T , λ4 = 0, 3820, λ3 = 1, 3820, λ2 = 2, 6180 e λ1 = 3, 6180, após 27 iterações
(para todos os intervalos de busca).
Note que não se obtém, com essa técnica, os autovetores correspondentes aos autovalores. Os
métodos apresentados na seção a seguir podem ser utilizados para se obter esses autovetores.
6.5
Métodos para aproximação de autovalores e autovetores
Em muitas aplicações, não é necessário obter-se todos os autovalores; é comum desejar-se, por
exemplo, obter apenas o maior autovalor e seu correspondente autovetor. Os métodos apresentados
nessa seção são indicados para o caso em que apenas um dos autovalores (e seu autovetor) necessita
ser calculado. Particularmente, tais métodos são iterativos e apresentam boa eficiência quando a
matriz em estudo é grande, esparsa e apresenta uma grande separação relativa entre o autovalor
desejado e os demais autovalores.
6.5.1
Método da potência
Seja A uma matriz de ordem n com autovalores λi tais que
|λ1 | = |λ2 | = . . . = |λr | > |λr+1 | ≥ . . . ≥ |λn |
(6.18)
Nesse caso, diz-se que A apresenta r autovalores dominantes. Por hipótese, assumimos que existem
n autovetores linearmente independentes xi , de onde qualquer vetor arbitrário z0 pode ser expresso
como combinação linear desses autovetores, i.e.
z0 =
n
αi xi
(6.19)
i=1
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
120
Introdução ao Cálculo Numérico
Autovalores e Autovetores
Considere agora o método de aproximação sucessiva
zk = Azk−1 ,
k = 1, 2, . . .
(6.20)
onde z0 é um valor inicial, dado. Usando as equações (6.1), (6.19) e escrevendo (6.20) em termos
de z0 , temos
zk
= Azk−1 = A2 zk−2 = . . . = Ak z0
n
=
αi λki xi
(6.21)
i=1
Se pelo menos um dos α1 , α2 , . . ., αr não é nulo, então os termos correspondentes a eles, i.e.
r
k
i=1 αi λi xi irão dominar o somatório da equação (6.21).
Suponha, por exemplo, que temos um autovalor dominante, λ1 , de A. Considerando que
α1 = 0, podemos reescrever (6.21) como
k n
λi
zk = λk1 α1 x1 +
αi
xi
λ
1
i=1
Note agora que, como λ1 > λ2 ≥ . . . ≥ λn , por hipótese, então os termos
k
λi
λ1
tendem a zero à medida que k cresce. Daı́, podemos escrever
zk = λk1 (α1 x1 + &k )
(6.22)
onde &k é um vetor com elementos próximos a zero. O vetor zk tende, então, a aproximar o
autovetor não-normalizado x1 . Essa equação nos permite escrever o assim chamado método da
potência.
Da equação (6.22), podemos escrever
(α1 x1 + &k+1 )
zk+1 = λk+1
1
e, dividindo a i-ésima componente da equação acima pela componente correspondente de (6.22),
obtemos
α1 x1 + &k+1
(zk+1 )i
= λ1
(6.23)
→ λ1 , quando k → ∞, i = 1, 2, . . . , n
(zk )i
α1 x1 + &k
onde (zk )i indica o elemento i do vetor zk . A equação (6.23) nos diz que a taxa de convergência
do método depende não só das constantes αi , mas principalmente das frações
λ2 λ3 , , . . . , λn .
λ1 λ1 λ1 Quanto menores forem esses frações, mais rápida é a convergência; por isso diz-se que o método
da potência é eficiente – converge rapidamente para um autovalor – desde que este autovalor seja
dominante, i.e., relativamente distante dos demais.
De posse das equações (6.20) e (6.23), podemos escrever um algoritmo para o método da
potência. Uma questão que se coloca é: quais valores iniciais, λ0 e z0 , devemos utilizar para o
autovalor dominante e seu autovetor? Para z0 , consideraremos um vetor arbitrário, o qual será
normalizado antes de se iniciar as iterações. Com essa escolha, valemo-nos da equação (6.1) e
escrevemos
Az0
z0T Az0
= λ0 z0 ... || z0 || = 1 ...
= z0T λ0 z0 = λ0 (z0T z0 ) = λ0
Aplica-se, então, repetidamente a equação (6.20), normalizando o vetor zk a cada iteração, conforme
mostrado no algoritmo 6.5.1. O exemplo 6.7 mostra o funcionamento do método.
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
121
Introdução ao Cálculo Numérico
Autovalores e Autovetores
Algoritmo 6.5.1 Método da potência
proc potencia(input: A, z0 , &, kmax ; output: λk , zk )
z0 ← z0 /|| z0 ||
λ0 ← z0T Az0
for k = 1, 2, . . . , kmax do
q ← Azk−1
zk ← q/|| q ||
λk ← zkT Azk
if | λk − λk−1 | < & then
break
endif
endfor
endproc
Exemplo 6.7 Seja a matriz
8 1
A = −1 5
0 1
2
1 ,
90
a qual tem como autovalores e respectivos autovetores,
λ1 = 90, 0115, λ2 = 7, 6308, λ3 = 5, 3577
0, 0245
−0, 9353
−0, 0043
x1 = 0, 0115 , x2 = 0, 3539 , x3 = −0, 0111 .
0, 9996
−0, 0043
0, 9996
Utilizando-se o método da potência com um vetor com três elementos escolhidos arbitrariamente
e normalizado, z0 = (0, 4394, 0, 6415, 0, 6287)T , obtém-se a seguinte seqüência de valores, com uma
tolerância para convergência de 10−5 :
k
0
1
2
3
4
5
6
zk
(0, 4394, 0, 6415, 0, 6287)T
(0, 0940, 0, 0590, 0, 9938)T
(0, 0313, 0, 0133, 0, 9994)T
(0, 0251, 0, 0115, 0, 9996)T
(0, 0246, 0, 0115, 0, 9996)T
(0, 0245, 0, 0115, 0, 9996)T
(0, 0245, 0, 0115, 0, 9996)T
λk
40, 5408
89, 2834
89, 9939
90, 0102
90, 0114
90, 0115
90, 0115
onde pode-se verificar que z6 é uma boa aproximação para x1 , sujeita àquela tolerância.
Caso a matriz tenha autovalores dominantes repetidos, i.e.
λ1 = λ2 = . . . = λr
o método da potência irá obter apenas um autovetor, o qual será combinação linear dos autovetores
correspondentes a λ1 .
O método da potência diverge se A tiver autovalores diferentes, porém de mesmo valor absoluto
como, por exemplo, um par conjugado de autovalores dominantes complexos, λ2 = λ1 ; o exemplo
a seguir ilustra tal situação:
Exemplo 6.8 Seja a matriz
1 10
2
10 ,
A = −1 1
10 1 −13
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
122
Introdução ao Cálculo Numérico
Autovalores e Autovetores
a qual tem como autovalores e respectivos autovetores,
λ1 = −9, 4515 + 3, 8807i, λ2 = −9, 4515 − 3, 8807i, λ3 = 7, 9030
0, 0307 − 0, 4143i
0, 0307 + 0, 4143i
0, 7897
x1 = 0, 2160 + 0, 5518i , x2 = 0, 2160 − 0, 5518i , x3 = 0, 4651 .
−0, 4368 − 0, 5343i
−0, 4368 + 0, 5343i
0, 4000
Utilizando-se o método da potência com um vetor com três elementos escolhidos arbitrariamente
e normalizado, z0 = (0, 4857, 0, 0197, 0, 8739)T , obtém-se a seguinte seqüência de valores, com uma
tolerância para convergência de 10−5 :
k
0
1
2
3
4
5
6
zk
(0, 4857, 0, 0197, 0, 8739)T
(0, 2253, 0, 7668, −0, 6010)T
(0, 4829, −0, 3946, 0, 7817)T
(−0, 2066, 0, 7546, −0, 6229)T
(0, 5786, −0, 5001, 0, 6443)T
(−0, 4517, 0, 7731, −0, 4454)T
(0, 8581, −0, 4338, 0, 2749)T
λk
−4, 3241
−9, 1975
−8, 1345
−9, 4601
−6, 4876
−6, 2931
−1, 8886
a qual apresenta um comportamento não convergente.
6.5.2
O método da potência com translação da origem
Como vimos na seção anterior, a convergência do método da potência depende de | λ2 /λ1 |, para
o caso de existir apenas um autovalor dominante. Se essa razão for muito próxima de 1, então a
convergência é muito lenta.
No entanto, podemos obter a solução de forma mais rápida se procedermos a uma modificação
do método da potência. Essa modificação baseia-se no fato de que, se λ é um autovalor de uma
matriz A, então λ − σ é o autovalor correspondente da matriz A − σI. Dessa forma, se aplicarmos
o método da potência a uma matriz A − σI, tal que λ1 − σ ainda seja dominante, a convergência
do método dependerá de
λ2 − σ λ1 − σ o que, para um valor adequado de σ, poderá ser menor do que | λ2 /λ1 |. A esse processo, dá-se
o nome de translação da origem – é como se os autovalores estivessem distribuı́dos em um novo
sistema de referência cuja origem é σ, e não mais zero – e pode ser bastante eficaz, desde que a
escolha de σ seja criteriosa.
Obviamente, poderı́amos calcular explicitamente a matriz A − σI e utilizar o algoritmo 6.5.1;
no entanto, pequenas modificações naquele algoritmo nos permitem utilizar o processo de translação da origem de forma mais eficiente. Novamente, z0 é considerado um vetor unitário, de onde
podemos obter a seguinte estimativa para λ0 :
(A − σI)z0
z0T Az0 − σz0T z0
λ0
= λ0 z0 ;
pré-multiplicando por z0T ,
= λ0 (z0T z0 ) ... || z0 || = 1 ...
= z0T Az0 − σ
e, por analogia, escrevemos
λk = zkT Azk − σ
Além disso, ao invés de calcularmos q = Azk , devemos calcular q = Azk − σzk . Ao final do
processo, devemos corrigir λk , adicionando a ele σ. Essas idéias são apresentadas no algoritmo
6.5.2.
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
123
Introdução ao Cálculo Numérico
Autovalores e Autovetores
Algoritmo 6.5.2 Método da potência (com translação)
proc potencia translação(input: A, z0 , σ, &, kmax ; output: λk , zk )
z0 ← z0 /|| z0 ||
λ0 ← z0T Az0 − σ
for k = 1, 2, . . . , kmax do
q ← Azk−1 − σzk−1
zk ← q/|| q ||
λk ← zkT Azk − σ
if | λk − λk−1 | < & then
break
endif
endfor
λk ← λk + σ
endproc
O exemplo a seguir ilustra o uso do método da potência com translação de origem.
Exemplo 6.9 Seja a matriz
2 −1
2
A = −1
0 −1
0
−1 ,
2
a qual tem como autovalores e respectivos autovetores,
λ1 = 3, 4142, λ2 = 2, λ3 = 0, 5858
0, 5000
0, 7071
0, 5000
x1 = −0, 7071 , x2 = 0, 0000 , x3 = 0, 7071 .
0, 5000
−0, 7071
0, 5000
Note que | λ2 /λ1 | = 0, 5858. Se utilizarmos o método da potência, a uma tolerância de 10−5 e
vetor inicial z0 = (1, 0, 0)T , necessitaremos de 13 iterações para obter a aproximação 3, 4142 para
o autovalor λ1 .
No entanto, se usarmos o translação da origem, com σ = 1, necessitamos apenas de 9 iterações
para obter a mesma aproximação; veja que
λ2 − 1 1
=
= 0, 4142 < 0, 5858 = λ2 λ1 λ1 − 1 2, 4142 o que sugere o menor número de iterações.
6.5.3
Método da iteração inversa
Como vimos, o método da potência nos permite aproximar o autovalor dominante de A; suponha,
agora, que desejamos aproximar o menor autovalor (e seu correspondente autovetor) de A. Relembrando que os autovalores de A−1 são o inverso dos autovalores de A (equação (6.3)), então,
se utilizarmos o método da potência sobre a matriz A−1 , aproximaremos o menor autovalor de
A pois ele é o maior autovalor de A−1 . A essa modificação do método da potência chamamos de
método da iteração inversa.
O método da iteração inversa procede, basicamente, com o cálculo sucessivo de vetores zk
dados por
zk = A−1 zk−1 , k = 1, 2, . . .
mas já vimos (capı́tulo 4) que, computacionalmente, devemos evitar, se possı́vel, calcular a inversa
de uma matriz. Nesse caso, é aconselhado que se resolva o sistema
Azk = zk−1 ,
k = 1, 2, . . .
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
124
Introdução ao Cálculo Numérico
Autovalores e Autovetores
através da fatoração LU de A (seção 4.3.2), uma vez que várias iterações serão necessárias para
se aproximar o menor autovalor e respectivo autovetor.
Além disso, o método da iteração inversa é, normalmente, combinado com a translação de
origem, o que resulta na fatoração LU da matriz A − σI. O algoritmo 6.5.3 apresenta o método
da iteração inversa, incorporando translação de origem.
Algoritmo 6.5.3 Método da iteração inversa (com translação)
proc iteração inversa translação(input: A, z0 , σ, &, kmax ;
output: λk , zk )
Fatore A − σI no produto LU
z0 ← z0 /|| z0 ||
λ0 ← z0T Az0 − σ
for k = 0, 1, . . . , kmax do
Resolva o sistema Ly = zk
Resolva o sistema U q = y
zk ← q/|| q ||
λk ← zkT Azk − σ
if | λk − λk−1 | < & then
break
endif
endfor
λk ← λk + σ
endproc
Exemplo 6.10 Seja a matriz do exemplo 6.9,
2 −1
2
A = −1
0 −1
0
−1 ,
2
cujo menor autovalor é λ3 = 0, 5858 e o seu correspondente autvetor é x3 = (0, 5000, 0, 7071, 0, 5000)T .
Se utilizarmos o algoritmo 6.5.3 com σ = 0, i.e. sem translação da origem, a uma tolerância
de 10−5 e vetor inicial z0 = (1, 0, 0)T , necessitaremos de 7 iterações para obter a aproximação
0, 5858 para o autovalor λ3 e (0, 5002, 0, 7071, 0, 4998)T para o correspondente autovetor.
No entanto, se usarmos o translação da origem, com σ = 0, 5, necessitamos apenas de 4
iterações para obter a mesma aproximação; veja que
−1 −1
λ2 − 0, 5 0
=
= 0 < 0, 2929 = λ2 λ−1 λ−1 − 0, 5 0, 0858 3
3
o que sugere o menor número de iterações; na verdade, σ = 0, 5 é a melhor escolha possı́vel, nesse
caso.
Outro exemplo mostra como usar o método da iteração inversa em conjunto com o teorema de
Gerschgorin, a fim de se determinar um autovalor especı́fico.
Exemplo 6.11 Seja a matriz
5 2
A= 2 3
1 1
1
1
1
Os discos de Gerschgorin são:
d1
: c1 = 5,
r1 = 3
d2
d3
: c2 = 3,
: c3 = 1,
r2 = 3
r3 = 2
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
125
Introdução ao Cálculo Numérico
Autovalores e Autovetores
Suponha que desejamos aproximar o menor autovalor; como o disco d3 é aquele que se encontra
mais à esquerda em comparação aos demais, podemos utilizar o seu centro como fator de transla√ −1
ção. Então, utilizamos o método da iteração inversa com σ = 1, vetor inicial z0 = 3 (1, 1, 1)T
e tolerância 10−5 e obtemos λ = 0, 5764 e z = (−0, 0597, −0, 3380, 0, 9393)T após 10 iterações.
Por outro lado, se tivéssemos utilizado σ = c3 + r3 , a convergência para o mesmo autovalor seria
obtida em apenas 4 iterações.
6.5.4
O método da iteração inversa e o quociente de Rayleigh
Como visto no teorema 6.2.2, o valor do autovalor dominante λ1 de uma matriz real simétrica
é o máximo do quociente de Rayleigh, dentre todos os vetores x = 0. Isso nos permite utilizar
a expressão (6.12) juntamente com o método da iteração inversa, conforme mostra o algoritmo
6.5.4.
Algoritmo 6.5.4 Método da iteração inversa com translação via
quociente de Rayleigh)
proc iteração inversa translação(input: A, z0 , &, kmax ;
output: λk , zk )
z0 ← z0 /|| z0 ||
for k = 0, 1, . . . , kmax do
λk =
T
zk
Azk
Tz
zk
k
Resolva o sistema (A − λk I)q = zk
zk ← q/|| q ||
if || zk − zk−1 || < & then
break
endif
endfor
endproc
Note que, no algoritmo 6.5.4, um sistema de equações diferente é resolvido a cada iteração, já
que uma nova estimativa λk é utilizada a cada iteração. É possı́vel, no entanto, que o sistema
A − λk I seja singular e, nesse caso, o processo deve ser terminado.
6.6
Exercı́cios
Exercı́cio 6.1 Determine os autovalores e autovetores correspondentes da matriz
1 −1 −1
0
2
5 .
0
0 −1
Exercı́cio 6.2 Calcule o autovalor dominante de
10 9
8
3 5
6 .
7 2 −1
Exercı́cio 6.3 Calcule o autovalor dominante
6
2
1
e o autovetor correspondente da matriz
2 1
3 1 ,
1 1
usando o método da potência, com z0 = (1, 1, 1)T e tolerância 10−5 .
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
126
Introdução ao Cálculo Numérico
Autovalores e Autovetores
Exercı́cio 6.4 Calcule o autovalor dominante e o autovetor correspondente da matriz
0
1 1
−1
0 1 ,
−1 −1 0
usando o método da potência, com z0 = (1, 1, 1)T e tolerância 10−5 .
Exercı́cio 6.5 Explique o que acontece com o método da potência para a matriz
2
1 −1
1
2 −1 ,
1 −1
2
com z0 = (1, 1, 1)T e tolerância 10−5 , sabendo que os seus autovalores são 1, 2 e 3. Repita para
z0 = (1, 0, 10−6)T .
Exercı́cio 6.6 Utilize o método da iteração inversa para calcular o menor autovalor da matriz
2
1 −1
1
2 −1 ,
1 −1
2
com z0 = (1, 1, 1)T e tolerância 10−5 .
Exercı́cio 6.7 Seja a matriz
5 2
A= 2 3
1 1
1
1
1
Explique o que ocorre com o método da iteração inversa utilizado com σ = 3, z0 = (1, 0, 0)T e
tolerância 10−5 . Generalize a sua resposta.
A.L. de Bortoli, C. Cardoso, M.P.G. Fachin, R.D. da Cunha
127
Baixar