NOTAS DE AULA
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
SALVADOR – BA
2007
“Ants”. M. C. Escher
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
2
VETORES – UM POUCO DE HISTORIA
A lei do paralelogramo para a adição de vetores é tão intuitiva que sua origem é desconhecida.
Pode ter aparecido em um trabalho, agora perdido, de Aristóteles (384-322 a.C.), e está na Mecânica
de Heron (primeiro século d.C.) de Alexandria. Também era o primeiro corolário no Principia
Mathematica (1687) de Isaac Newton (1642-1727). No Principia, Newton lidou extensivamente com o
que agora são consideradas entidades vetoriais (por exemplo: velocidade e força), mas nunca com o
conceito de um vetor. O estudo sistemático e o uso de vetores foram fenômenos do século XIX e início
do século XX.
Vetores nasceram nas primeiras duas décadas do século XIX com as representações
geométricas de números complexos. Caspar Wessel (1745-1818), Jean Robert Argand (1768-1822),
Carl Friedrich Gauss (1777-1855) e pelo menos um ou dois outros, conceberam números complexos
como pontos no plano bidimensional, isto é, como vetores bidimensionais. Matemáticos e cientistas
trabalharam com estes novos números e os aplicaram de várias maneiras; por exemplo, Gauss fez um
uso crucial de números complexos para provar o Teorema Fundamental da Álgebra (1799). Em 1837,
William Rowan Hamilton (1805-1865) mostrou que os números complexos poderiam ser considerados
abstratamente como pares ordenados (a, b) de números reais. Esta idéia era parte de uma campanha de
muitos matemáticos, incluindo Hamilton, para procurar uma maneira de estender os “números”
bidimensionais para três dimensões; mas ninguém conseguiu isto preservando as propriedades
algébricas básicas dos números reais e complexos.
Em 1827, August Ferdinand Möbius publicou um pequeno livro, The Barycentric Calculus, no
qual introduziu diretamente segmentos de reta que eram denotados por letras do alfabeto, vetores na
essência, mas não no nome. No seu estudo de centros de gravidade e geometria projetiva, Möbius
desenvolveu uma aritmética destes segmentos de reta; adicionou-os e mostrou como multiplicá-los por
um número real. Seus interesses estavam em outro lugar, contudo, e ninguém se importou em notar a
importância destes cálculos.
Depois de muita frustração, Hamilton estava finalmente inspirado a desistir da procura por um
sistema “numérico” tridimensional e em vez disso, inventou um sistema de quatro dimensões que
chamou de quatérnios. Nas suas próprias palavras: 16 de outubro de 1843,
O que parecia ser uma segunda-feira e um dia de Conselho da Academia Real Irlandesa - eu
estava caminhando para participar e presidir, …, ao longo do Canal Real, … uma subcorrente de pensamento estava na minha mente, que finalmente deu um resultado, o qual não
é muito dizer que logo senti a importância. Um circuito elétrico pareceu fechar; e uma faísca
surgiu, ... Não pude resistir ao impulso ... escrever com uma faca sobre uma pedra da ponte
Brougham, quando passamos por ela, a fórmula fundamental... .
Os quatérnios de Hamilton foram escritos, q = w + ix + jy + kz , onde w, x, y, e z eram números
reais. Hamilton rapidamente percebeu que seus quatérnios consistiam de duas partes distintas. O
primeiro termo, o qual chamou de escalar e “x, y, z para suas componentes retangulares, ou projeções
em três eixos retangulares, ele [referindo-se a si próprio] foi induzido a chamar a expressão trinomial
propriamente dita, assim como a reta a qual ela representa, de um VETOR”. Hamilton usou suas
“fórmulas fundamentais”, i 2 = j 2 = k 2 = −ijk = −1 , para multiplicar quatérnios, e imediatamente
descobriu que o produto, q1q2 = − q2 q1 , não era comutativo.
Hamilton tinha se tornado cavaleiro em 1835, e era um cientista conhecido que já tinha feito
um trabalho fundamental em Ótica e Física Teórica na época que inventou quatérnios, por isso foi
imediatamente reconhecido. Em troca, devotou os 22 anos restantes de sua vida ao seu
desenvolvimento e promoção. Escreveu dois livros completos sobre o assunto, Lectures on
Quaternions (1853) e Elements of Quaternions (1866), detalhando não apenas a álgebra dos quatérnios
mas também como poderiam ser usados em Geometria. Em certo ponto Hamilton escreveu, “eu ainda
devo afirmar que esta descoberta me parece ser tão importante para a metade do século XIX como a
descoberta de flúxions foi para o final do século XVII”. Ele teve um discípulo, Peter Guthrie Tait
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
3
(1831-1901), que, na década de 1850, começou a aplicar quatérnios a problemas em eletricidade e
magnetismo e a outros problemas em Física. Na segunda metade do século XIX, a defesa de Tait dos
quatérnios provocou reações calorosas, ambas positivas e negativas, na comunidade científica.
Ao redor da mesma época que Hamilton descobriu os quatérnios, Hermann Grassmann (18091877) estava escrevendo The Calculus of Extension (1844), agora muito conhecido pelo seu título em
alemão, Ausdehnungslehre. Em 1832, Grassmann começou a desenvolver “um novo cálculo
geométrico” como parte do seu estudo da teoria de marés, e subseqüentemente usou estas ferramentas
para simplificar partes de dois trabalhos clássicos, o Analytical Mechanics de Joseph Louis Lagrange
(1736-1813) e o Celestial Mechanics de Pierre Simon Laplace (1749-1827). Em seu
Ausdehnungslehre, primeiro Grassmann expandiu o conceito de vetores a partir da familiar 2 ou 3
dimensões para um número arbitrário, n, de dimensões; isto estendeu grandemente as idéias de espaço.
Segundo, e ainda mais geralmente, Grassmann antecipou grande parte da álgebra matricial e linear
moderna e análise vetorial e tensorial.
Infelizmente, o Ausdehnungslehre tinha dois pontos contra si. Primeiro, era muito abstrato,
faltando exemplos explicativos e foi escrito em um estilo obscuro com uma notação extremamente
complicada. Mesmo depois de tê-lo estudado, Möbius não tinha sido capaz de entendê-lo
completamente. Segundo, Grassmann era um professor de ensino médio sem uma reputação científica
importante (comparado a Hamilton). Embora seu trabalho tenha sido amplamente ignorado,
Grassmann promoveu sua mensagem nas décadas de 1840 e 1850 com aplicações em eletrodinâmica e
geometria de curvas e superfícies, mas sem muito sucesso geral. Em 1862, publicou uma segunda
edição revisada do seu Ausdehnungslehre, mas também era escrito de maneira obscura e era muito
abstrato para os matemáticos de sua época e praticamente teve a mesma sina da primeira edição. No
final de sua vida, Grassmann distanciou-se da matemática e iniciou uma segunda carreira de pesquisa
muito bem sucedida, em fonética e lingüística comparada. Finalmente, nas décadas de 1860 e 1870, o
Ausdehnungslehre começou lentamente a ser entendido e apreciado e Grassmann começou a receber
algum reconhecimento favorável por sua matemática visionária. Uma terceira edição do
Ausdehnungslehre foi publicada em 1878, ano seguinte de sua morte.
Durante a metade do século XIX, Benjamin Peirce (1809-1880) era, de longe, o mais
proeminente matemático nos Estados Unidos, e se referiu a Hamilton como, “o monumental autor dos
quatérnios”. Peirce foi um professor de matemática e astronomia em Harvard de 1833 a 1880 e
escreveu um enorme livro chamado System of Analytical Mechanics (1855; segunda edição 1872), no
qual, surpreendentemente não incluiu quatérnios. Em vez disso, Peirce expandiu o que chamou de
“esta maravilhosa álgebra do espaço” ao escrever seu livro Linear Associative Algebra (1870), um
trabalho totalmente de álgebra abstrata. Dizia-se que quatérnios era o assunto favorito de Peirce e ele
teve muitos alunos que se tornaram matemáticos e que escreveram um bom número de livros e artigos
sobre o assunto.
James Clerk Maxwell (1831-1879) foi um proponente dos quatérnios perspicaz e crítico.
Maxwell e Tait eram escoceses, tinham estudado juntos em Edimburgo e na Universidade de
Cambridge e dividiam os mesmos interesses em Física-Matemática. No que chamou de “classificação
matemática de quantidades físicas”, Maxwell dividiu as variáveis da Física em duas categorias,
escalares e vetoriais. Então, em termos desta estratificação, apontou que usar quatérnios tornava
transparente as analogias matemáticas em Física que tinham sido descobertas por Lord Kelvin (Sir
William Thomson, 1824-1907) entre o escoamento de calor e a distribuição de forças eletrostáticas.
Contudo, nos seus artigos, especialmente em seu muito influente Treatise on Electricity and
Magnetism (1873), Maxwell enfatizou a importância do que descreveu como “idéias de quatérnios...
ou a doutrina de vetores” como um “método matemático... um método de pensar”. Ao mesmo tempo,
apontou a natureza não homogênea do produto de quatérnios, e avisou cientistas para não usar “os
métodos de quatérnios” com seus detalhes envolvendo os três componentes vetoriais. Essencialmente,
Maxwell estava sugerindo uma análise puramente vetorial.
William Kingdon Clifford (1845-1879) expressou “admiração profunda” pelo
Ausdehnungslehre de Grassmann e era claramente a favor de vetores, os quais freqüentemente
chamava de passos, em lugar de quatérnios. Em seu Elements of Dynamic (1878), Clifford decompôs o
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
4
produto de dois quatérnios em dois produtos vetoriais muito diferentes, os quais chamou de produto
escalar e produto vetorial. Para análise vetorial, disse “minha convicção é que seus princípios
exerceram uma ampla influência sobre o futuro da ciência matemática”. Embora o Elements of
Dynamic fosse supostamente o primeiro de uma seqüência de livros-texto, Clifford não teve a
oportunidade de seguir estas idéias porque morreu jovem.
O desenvolvimento da álgebra vetorial e da análise vetorial como conhecemos hoje foi
revelado primeiramente em um conjunto de notas de aula feitos por J. Willard Gibbs (1839-1903) feito
para seus alunos na Universidade de Yale. Gibbs nasceu em New Haven, Connecticut (seu pai também
foi professor em Yale) e suas conquistas científicas principais foram em Física, termodinâmica
propriamente dita. Maxwell apoiava o trabalho de Gibbs em termodinâmica, especialmente as
apresentações geométricas dos resultados de Gibbs. Gibbs tomou conhecimento dos quatérnios quando
leu o Treatise on Electricity and Magnetism de Maxwell, e Gibbs também estudou o
Ausdehnungslehre de Grassmann. Concluiu que vetores forneceriam uma ferramenta mais eficiente
para seu trabalho em física. Assim, começando em 1881, Gibbs imprimiu por conta própria notas de
aulas sobre análise vetorial para seus alunos, as quais foram amplamente distribuídas para estudiosos
nos Estados Unidos, na Inglaterra e na Europa. O primeiro livro moderno sobre análise vetorial em
inglês foi Vector Analysis (1901), as notas de Gibbs colecionadas por um de seus alunos de pósgraduação, e Edwin B. Wilson (1879-1964). Ironicamente, Wilson cursou a graduação em Harvard
(B.A. 1899) onde tinha aprendido sobre quatérnios com seu professor, James Mills Peirce (18341906), um dos filhos de Benjamin Peirce. O livro de Gibbs/Wilson foi reimpresso em uma edição em
1960. Uma outra contribuição para o moderno entendimento e uso de vetores foi feita por Jean Frenet
(1816-1900). Frenet entrou na École normale supérieure em 1840, então estudou em Toulouse, onde
escreveu sua tese de doutorado em 1847. A tese de Frenet continha a teoria de curvas espaciais e as
fórmulas conhecidas como as fórmulas de Frenet-Serret (o triedro de Frenet). Frenet contribuiu com
apenas seis fórmulas enquanto que Serret contribui com nove. Frenet publicou esta informação no
Journal de mathematique pures et appliques em 1852.
Na década de 1890 e na primeira década do século XX, Tait e alguns outros ridicularizaram
vetores e defenderam quatérnios enquanto outros cientistas e matemáticos desenharam seu próprio
método vetorial. Oliver Heaviside (1850-1925), um físico autodidata que foi grandemente influenciado
por Maxwell, publicou artigos e seu livro Electromagnetic Theory (três volumes, 1893, 1899, 1912)
nos quais atacou quatérnios e desenvolveu sua própria análise vetorial. Heaviside tinha recebido cópias
das notas de Gibbs e falou muito bem delas. Ao introduzir as teorias de Maxwell sobre eletricidade e
magnetismo na Alemanha (1894), os métodos vetoriais foram defendidos e vários livros sobre análise
vetorial em alemão se seguiram. Os métodos vetoriais foram introduzidos na Itália (1887, 1888, 1897),
na Rússia (1907) e na Holanda (1903). Vetores agora são a linguagem moderna de grande parte da
Física e da Matemática Aplicada e continuam tendo seu próprio interesse matemático intrínseco.
Fonte: George B. Thomas Cálculo vol I e II. Pearson Education.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
5
ÁLGEBRA VETORIAL
Grandezas escalares e vetoriais. As grandezas físicas se subdividem em escalares e vetoriais. As
grandezas escalares são caracterizadas por sua intensidade ou tamanho (um número e sua unidade
correspondente), como por exemplo: tempo, comprimento, massa, temperatura, etc. As grandezas
vetoriais se caracterizam por três componentes: intensidade, direção e sentido, como por exemplo: a
força, momento linear, velocidade, deslocamento, etc.
Grandezas escalares
• 50 kg de massa
• 30 minutos
• 15 m de comprimento
Grandezas vetoriais
i. Uma força de 5 N fazendo um ângulo de 30° com a
reta x e tendo o sentido da esquerda para a direita.
Veja a figura ao lado
ii. Uma velocidade de 10 m/s na direção da reta s e
no sentido da direita para a esquerda. Veja figura
ao lado.
1. Segmento orientado é um segmento determinado por um par ordenado de pontos, onde o primeiro
é chamado origem e o segundo, extremidade. Isto define a orientação ou sentido do segmento.
Notação: (A, B) ou AB
B
A
2. Segmento nulo é aquele cuja origem coincide com a extremidade: (A,A) ou AA .
3. Segmentos opostos: o segmento orientado BA diz-se oposto do segmento orientado AB .
B
A
4. Medida de um segmento – comprimento. Fixada uma unidade de comprimento, fica associado a
cada segmento orientado AB um número real não negativo, seu comprimento, que é a sua medida em
relação àquela unidade.
B
|
|
Obs:
med( AB ) = 3
med( AB ) = med( BA )
med( AA ) = 0
A
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
6
5. Direção e sentido. Dois segmentos orientados não nulos AB e CD têm a mesma direção se as
suas retas suportes são paralelas ou coincidentes.
AB , DC e EF têm a mesma direção.
AB e EF têm o mesmo sentido.
AB e DC têm sentidos opostos
A
B
C
D
E
F
Observação. Só podemos comparar os sentidos de dois segmentos orientados se eles possuem a
mesma direção.
6. Segmentos eqüipolentes. Um segmento orientado AB é eqüipolente a um segmento orientado
CD , se e somente se:
i)
ii)
B
ambos são nulos;
se não são nulos, têm mesmo comprimento e mesmo sentido.
D
A
Notação: AB ~ CD
C
7. Propriedades da eqüipolência
AB ~ AB
i)
(reflexiva)
ii)
AB ~ CD ⇒ CD ~ AB
(simétrica)
iii)
AB ~ CD e CD ~ EF ⇒ AB ~ EF
(transitiva)
iv)
Dado um segmento orientado AB e um ponto C, existe um único ponto D tal que
v)
AB ~ CD .
AB ~ CD ⇒ BA ~ DC
vi)
AB ~ CD ⇒ AC ~ BD
8. Vetor. Chama-se vetor determinado por um segmento
orientado
r
v
AB
o conjunto de todos os segmentos
uuur
eqüipolentes a AB . Denotamos por AB ou B – A ou ainda
B
por uma letra minúscula v .
A
Observações:
•
•
r
uuur
Os segmentos nulos determinam um único vetor, chamado vetor nulo. Denotação: 0 = AA .
uuur
AB = CD ⇔ AB ~ CD .
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
7
9.
uuur
uuur
r
Vetor oposto. O vetor BA diz-se oposto de AB . Se AB é representante de um vetor v , o vetor
r
r
oposto de v é indicado por −v .
10. Módulo (norma ou comprimento) de um vetor é o comprimento de qualquer um de seus
r
r
representantes. Notação: v ou v .
r
r
11. Vetor unitário é o vetor cujo módulo (norma) é 1, ou seja, um vetor v é dito unitário se v = 1 .
12. Direção (sentido).
r
A direção (o sentido) de um vetor não nulo v é a direção (o sentido) de qualquer um dos seus
representantes.
r
r
13. Versor de um vetor não nulo v é o vetor unitário que tem mesmo sentido de v . Denotamos o
r
r
versor de v por v o ou v̂ .
14. Vetores paralelos são aqueles que têm a mesma direção.
B
D
A
C
Observamos que o vetor nulo é paralelo a qualquer vetor.
15. Vetores coplanares são aqueles que têm representantes num mesmo plano.
16. Vetores colineares são aqueles que têm representantes numa mesma reta.
r
17. Proposição. Dado um ponto A e um vetor v , existe um único ponto B tal que v = AB , isto é
r
r
B = A + v , ou ainda, v = B − A .
A este ponto é interessante observar a etimologia da palavra vetor. Vetor é o particípio passado
do verbo latino vehere: transportar, levar. De fato, esta palavra é pertinente ao conteúdo da
proposição anterior: o ponto A é “transportado” até o ponto B.
18.
Propriedades envolvendo ponto e vetor.
i.
ii.
r
A+0 = A
r r
(A−v)+v = A
r
r
iii. A + v = B + v ⇒ A = B
r
r
r r
iv. A + v = A + u ⇒ v = u
v.
uuur
A + AB = B
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
8
OPERAÇÕES COM VETORES
SOMA DE VETORES
1.
r
r r
Definição. Dados dois vetores u , v e um ponto A, tomemos um ponto B tal que B = A + u e um
r r r
r
ponto C tal que C = B + v . Os pontos A e C determinam um vetor s = u + v , chamado soma de
r r
u e v.
r
Obs: o vetor s não depende do ponto A.
B
r
u
r
v
r
u
r
v
A
∀ A, B e C ,
r
s
C
uuur uuur uuur
AC = AB + BC
r
Regra do paralelogramo. Escolhendo representantes de u e
r
v com a mesma origem A, o vetor soma tem como
representante a diagonal do paralelogramo formado pelos
r r
vetores u e v .
r
u
r
v
r
s
r r r
2. Propriedades da adição de vetores. Sejam u , v e w vetores quaisquer. Então,
r
r
r
r r
r
r
i. u + v = v + u
r r
r r r r
ii. ( u + v ) + w = u + ( v + w )
comutativa
associativa
iii. u + 0 = u
r
r r
iv. u + ( −u ) = 0
elemento neutro
elemento oposto
r r
r r
3. Diferença de vetores. Dados dois vetores u e v , chama-se diferença dos vetores u e v ao vetor
r r r
r r
r
d = u + ( −v ) e é indicado por d = u − v .
4. Exemplos
Observemos a soma dos vetores indicados nas figuras abaixo:
C
E
H
D
F
a)
A
G
b)
B
AB + AC + AF = AH
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
AO + FO + DC = FC
ERON E ISABEL
9
PRODUTO DE UM NÚMERO REAL POR UM VETOR
r
1. Definição. Sejam a ∈ R e v um vetor.
r r
r r
a.
Se a = 0 ou v = 0 então a ⋅ v = 0 .
r r
b. Se a ≠ 0 e v ≠ 0 , então o vetor a ⋅ v caracteriza-se por:
r
a ⋅ v // v (a direção do vetor resultante é a mesma de v );
•
r
a ⋅ v e v têm o mesmo sentido, se a > 0 ;
r
a ⋅ v e v têm sentidos contrários, se a < 0 ;
r
r
a ⋅v = a ⋅ v .
•
•
•
r
v
r
2v
−
1 r
v
2
r r
2. Propriedades. Sejam a, b ∈ R e u e v vetores quaisquer.
r
r
r
r
r
r
i. a ( u + v ) = au + av
ii.
iii.
r
( a + b ) v = av + bv
r
r
a ( bv ) = ( ab ) v
iv. 1v = v
Observações:
•
r
1 r
⋅ v é indicado por v .
a
a
r
r r
r
v
Se v ≠ 0 , vˆ = r é o versor de v .
Se a ≠ 0 ,
•
v
r
3. Regras de sinais. Sejam a ∈ R e v um vetor.
r
r
i. ( − a ) ⋅ v = − ( av )
r
r
ii. a ⋅ ( −v ) = − ( av )
r
r
iii. ( − a ) ⋅ ( −v ) = av
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
10
DEPENDÊNCIA LINEAR
r r
r
1. Combinação linear. Dados n vetores v1 , v2 ,K , vn e n escalares a1 , a2 ,K , an , o vetor
r
r
r
r
r r
r
v = a1v1 + a2 v2 + L + an vn é dito uma combinação linear dos vetores v1 , v2 ,K , vn com
coeficientes a1 , a2 ,K , an .
r
r r
Exemplo: s = u + v , o vetor
r
s
r
u
r r
é combinação linear de u e v .
r
v
r
u
r
v
r
s
r r
r
2. Independência linear. Dados n vetores v1 , v2 ,K , vn , dizemos que esses vetores são linearmente
r
r
r
r
independentes (LI) se, e somente se, a equação a1v1 + a2 v2 + L + an vn = 0 admite apenas a
solução nula a1 = a2 = K = an = 0 .
Se existe algum escalar não nulo como solução da equação acima, então os vetores são ditos
linearmente dependentes (LD).
Exemplos:
a)
b)
r
u
r
u
r
r
v = 2u
r
r r
r r
u e v são LD, pois v − 2u = 0 .
r
v
r
r r
r r
u e v são LI, pois 0v + 0u = 0 .
ALGUNS TEOREMAS SOBRE (IN)DEPENDÊNCIA LINEAR
3. Teorema. n vetores são LD se, e somente se, um deles for escrito como combinação linear dos
outros.
r r
r
4. Teorema. Um vetor v é LD se, e somente se, v = 0 .
r r
r r
5. Teorema. u e v são LD se, e somente se, u e v são paralelos.
r r
r
r
6. Corolário. Se v ≠ 0 , então dados u e v vetores paralelos, existe um único k ∈ R tal que
u = kv .
7. Teorema. Três vetores são LD se, e somente se, são coplanares.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
11
r
r
r
r
r
8. Corolário. Se u e v são LI e w é coplanar com u e v , então existe um único par de números
r
r r
a, b ∈ R , tal que w = au + bv .
9. Teorema. Quatro vetores são sempre LD no R³.
r r r
r
10. Corolário. Se v1 , v2 , v3 são LI e w é um vetor qualquer, então existe um único terno de números
r
r
r
r
a, b, c ∈ R , tal que w = av1 + bv2 + cv3 .
BASE
1. Definições
1.1. Um conjunto de vetores V munido das operações definidas anteriormente de multiplicação
por um número real e adição, é chamado espaço vetorial sobre R.
r r
r
r r
r
1.2. Seja V um espaço vetorial. Sejam v1 , v2 ,..., vn ∈ V . Dizemos que v1 , v2 ,..., vn geram V, se para
r
r
r
r
r
r
todo w ∈ V , w = a1v1 + a2 v2 + L + an vn , ou seja, w pode ser escrito como combinação linear
r r
r
de v1 , v2 ,..., vn .
r r
r
1.3. Dizemos que {v1 , v2 ,..., vn } é uma base de V, se esses vetores geram V e se são LI.
2.
Exemplos:
r
r
a) O conjunto unitário de qualquer v ≠ 0 constitui uma base para um conjunto de vetores paralelos
r
a v.
r
r
v
r r
b) O conjunto de quaisquer dois vetores {v1 , v2 } LI constitui uma base para o conjunto de vetores
r r
coplanares com v1 e v2 .
r
v1
r
v2
r r r
c) O conjunto de quaisquer três vetores {v1 , v2 , v3 } LI constitui uma base para o conjunto de
vetores do espaço R³.
r r r
r
r
r
r
Seja E = {e1 , e2 , e3 } uma base para o R³. Se v ∈ R 3 , temos v = a1e1 + a2 e2 + a3e3 . Costuma-se
r
r
r
r
expressar v da forma v = ( a1 , a2 , a3 ) E que são as coordenadas de v na base E ou v = ( a1 , a2 , a3 )
sem o índice E quando não se há dúvida quanto à base utilizada.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
12
3.
r
r
Teorema. Sejam u = ( a1 , a2 , a3 ) e v = ( b1 , b2 , b3 ) expressos pelas suas coordenadas numa mesma
base E e seja k ∈ R . Então,
3.1.
3.2.
3.3.
r r
u = v ⇔ a1 = b1 , a2 = b2 e a3 = b3
r r
u + v = ( a1 + b1 , a2 + b2 , a3 + b3 )
r
k ⋅ u = ( ka1 , ka2 , ka3 )
r
r
r
r
r
Exemplo. Sendo u = ( −1, 2, 0 ) e v = ( 3, −3,5 ) , determine w = −3u + 2v .
r
w = −3 ( −1, 2, 0 ) + 2 ( 3, −3,5 ) = ( 3, −6, 0 ) + ( 6, −6,10 ) = ( 9, −12,10 )
4.
r
r
Teorema. u = ( a1 , a2 , a3 ) e v = ( b1 , b2 , b3 ) são LD
⇔
a1 = kb1 , a2 = kb2 e a3 = kb3 para
algum escalar k ∈ R .
Exemplos:
r
r
r
r
a) u = ( −1, 2, 0 ) e v = ( 2, −4, 0 ) são LD, pois v = −2u .
r
r
r
b) 0 e u são LD, pois 0 = 0 ⋅ u .
5.
r
r
r
Teorema. u = ( a1 , a2 , a3 ) , v = ( b1 , b2 , b3 ) e w = ( c1 , c2 , c3 ) são LD ⇔
6.
r
r
r
Corolário. u = ( a1 , a2 , a3 ) , v = ( b1 , b2 , b3 ) e w = ( c1 , c2 , c3 ) são LI ⇔
a1
b1
c1
a2
a3
b2
b3
c2 = 0 .
c3
a1
b1
c1
a2
a3
b2
b3
c2 ≠ 0 .
c3
1 0 1
r
r
r
Exemplo: u = (1, 2,3) , v = ( 0,1, 2 ) e w = (1, 2, −1) são LI, pois 2 1 2 = −4 ≠ 0 .
3 2 −1
7.
r r
Vetores ortogonais. Dois vetores u e v são ortogonais se podem ser
representados por segmento orientados ortogonais.
r
u
r r
u +v
r r
r
r
Denotamos u ⊥ v (lê-se “ u é ortogonal a v ”).
r
v
r r
r r2 r2 r2
Aplicando o teorema de Pitágoras e a sua recíproca, temos: u ⊥ v ⇔ u + v = u + v .
Observações:
a) o vetor nulo é ortogonal a todo vetor.
r r
r r
r
r r
b) u ⊥ v e u ⊥ w ⇒ u ⊥ ( v + w ) .
c)
u ⊥ v e k ∈ R ⇒ u ⊥ kv .
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
13
8.
Base ortonormal. Uma base é ortonormal se é formada por vetores unitários, ortogonais dois a
dois.
r
r r r
r
r
O conjunto i , j , k é a base canônica do R³, onde i = (1, 0, 0 ) , j = ( 0,1, 0 ) , k = ( 0, 0,1) .
{
9.
}
Sistema de coordenadas cartesianas é um conjunto formado por um ponto O e uma base.
r r r
Indicamos um sistema de coordenadas cartesianas no espaço por O, i , j , k , se usarmos a base
{
}
canônica do R³. O ponto O é chamado de origem do sistema e os eixos que passam por O e tem
r r r
as direções dos vetores da base, no caso, de i , j e k são chamados de eixo das abscissas, eixo
das ordenadas e eixo das cotas, respectivamente.
uuur
r r r
Consideremos as coordenadas do vetor OP em relação à base i , j , k :
uuur
uuur
r r r
OP = xi + yj + zk ou OP = ( x, y, z ) .
r r r
Chamamos coordenadas do ponto P em relação ao sistema O, i , j , k , as coordenadas do vetor
uuur
uuur
OP . Portanto, para OP = ( x, y, z ) tem-se P ( x, y, z ) .
{
{
{
}
}
}
r r r
10. Propriedades. Seja O, i , j , k um sistema de coordenadas
uuur
a. Se P ( x1 , y1 , z1 ) e Q ( x2 , y2 , z2 ) , então PQ = Q − P = ( x2 − x1 , y2 − y1 , z2 − z1 ) .
r
r
b. Se P ( x1 , y1 , z1 ) e v = ( a, b, c ) , então P + v = ( x1 + a, y1 + b, z1 + c ) .
c.
x + x 2 y1 + y 2 z1 + z 2
O ponto médio de PQ é o ponto M 1
,
,
.
2
2
2
uuur
uuur
Exemplo: P (1, 2, 3) , Q(2, 3,5) , PQ = (1,1, 2 ) = OA
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
14
{
}
r r r
11. Módulo de um vetor a partir de suas coordenadas. Seja i , j , k uma base ortonormal.
r r r
r
r
Se v = xi + yj + zk , então v = x 2 + y 2 + z 2 .
r
r
r
2
Exemplo: v = (1, −1, 2 ) ⇒ v = 12 + ( −1) + 22 ⇒ v = 6 .
12. Propriedades do módulo (ou da norma) de um vetor
13.
1.
v ≥0 e v = 0 ⇔ v = 0.
2.
k v = k ⋅ v onde k ∈ R .
3.
u +v ≤ u + v
(desigualdade triangular)
Distância entre dois pontos. Considere dois pontos A( x1 , y1 , z1 ) e B ( x2 , y2 , z2 ) , a distância
entre A e B , d ( A, B ) , é dada por
uuur
d ( A, B ) =| BA |=| B − A | .
Exemplo: Considere os pontos A(0, 2, −1) e B (3, 0,1) , a distância entre esses pontos é dada por
uuur
d ( A, B) =| BA |=| (3, −2, 2) |= 32 + (−2)2 + 22 = 17
14.
r r
Vetor unitário (versor) associado a um vetor. Dado um vetor v ≠ 0 , podemos associar a este
r
v
vetor um vetor unitário v̂ do seguinte modo: vˆ = r .
|v |
r
r
Exemplo: Seja u = (0, 2, −1) , o vetor unitário associado a u é
r
u
(0, 2, −1) 2 −1
ˆ
u= r =
= 0,
,
.
|u |
5
5 5
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
15
PRODUTO ESCALAR
1.
r
r
Definição. Dados u e v vetores não nulos e escolhido um ponto O, podemos escrever
uuur
uuur
r
r
r
r
A = O + u e B = O + v . O ângulo θ determinado pelos representantes OA e OB de u e v ,
r r
r r
respectivamente, é denominado ângulo dos vetores u e v (ou medida angular entre u e v ).
•
•
•
•
2.
4.
r
u
O
A
B
r
v
r
r
r r
Definição. O produto escalar ou produto interno dos vetores u e v , indicado por u ⋅ v ou
r r
r r r r
r r
u , v é o número real u ⋅ v = u ⋅ v ⋅ cos θ , θ = ( u , v ) .
• ur ⋅ vr > 0 indica que cos θ > 0 , o que ocorre quando θ é ângulo agudo.
• ur ⋅ vr < 0 indica que cos θ < 0 , o que ocorre quando θ é ângulo obtuso.
• ur ⋅ vr = 0 indica que:
a)
b)
3.
r r
Notação: θ = ( u , v ) , onde 0° ≤ θ ≤ 180°
r r
Se θ = 0 , u e v têm mesmo sentido.
r r
Se θ = 180° , u e v têm sentidos opostos.
r r
r r
( u , v ) e ( u , −v ) são ângulos suplementares
um dos vetores é nulo,
os vetores são ortogonais, pois cos 90° = 0 .
r r r
Propriedades. Quaisquer que sejam os vetores u , v e w e qualquer que seja k ∈ R , vale:
r r
u ⋅v
r r
r r
3.1. Se u e v são não nulos e θ = ( u , v ) , então cos θ = r r .
u⋅v
r
r r
3.2. u = u ⋅ u
r r r r
3.3. u ⋅ v = v ⋅ u
r r
r r r r
3.4. k ( u ⋅ v ) = ( ku ) ⋅ v = u ⋅ ( kv )
r r r
r r r r
3.5. u ⋅ ( v + w ) = u ⋅ v + u ⋅ w
r r
r r
3.6. Se u ≠ 0 , então u ⋅ u > 0 .
r
r
Interpretação geométrica do produto escalar. Sejam u e v
r
vetores não nulos. O vetor v se exprime de maneira única
r r r
r r r
r
v = v1 + v2 , onde v1 // u e v2 ⊥ u .
r
r
r
v1 diz-se projeção ortogonal do vetor v na direção do vetor u .
r
r
Denotamos v1 = projur v .
r
v
r
v1
r
v2
r
u
r r
r
r
Prova. Como v1 // u , temos v1 = ku , k ∈ . Segue-se que
r r
r r r
r r r r
r2
r2
v ⋅ u = ( ku + v2 ) ⋅ u = k (u ⋅ u ) + v2 ⋅ u = k ⋅ u + 0 = k ⋅ u
Logo,
r
projur v
r r
r r
v ⋅u
r v ⋅u r
⇒ k = r 2 . Ainda, v1 = r 2 u .
u
u
r r
vr ⋅ ur r
v ⋅u
r
r
= r 2 u e r é a medida algébrica da projeção de v na direção de u .
u
u
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
16
5.
{
}
r r r
Expressão cartesiana do produto escalar. Fixada uma base ortonormal i , j , k , o produto
r
r
r
r
r
r
r
r
escalar dos vetores u = x1i + y1 j + z1k e v = x2 i + y2 j + z2 k
é o número real
x1 ⋅ x2 + y1 ⋅ y2 + z1 ⋅ z2 . Ou seja,
r r
u ⋅ v = x1 ⋅ x2 + y1 ⋅ y2 + z1 ⋅ z2 .
Prova:
r
r
r
r
r
r
r r
u ⋅ v = x1i + y1 j + z1k ⋅ x2i + y2 j + z2 k =
r r
r r
r r
r r
r r
r r
= ( x1 x2 ) i ⋅ i + ( x1 y2 ) i ⋅ j + ( x1 z2 ) i ⋅ k + ( y1 x2 ) j ⋅ i + ( y1 y2 ) j ⋅ j + ( y1 z2 ) j ⋅ k
r r
r r
r r
+ ( z1 x2 ) k ⋅ i + ( z1 y2 ) k ⋅ j + ( z1 z2 ) k ⋅ k
r r r r r r
r r r r r r
Como i ⋅ j = i ⋅ k = j ⋅ k = 0 e i ⋅ i = j ⋅ j = k ⋅ k = 1 , a expressão acima reduz-se a:
r r
u ⋅ v = x1 ⋅ x2 + y1 ⋅ y2 + z1 ⋅ z2
(
)(
)
r
r
Exemplo: Dados u = ( 3,0, 4 ) e v = (−1, 2, 0) , temos:
• ur ⋅ vr = 3 ⋅ ( −1) + 0 ⋅ 2 + 4 ⋅ 0 = −3
r r
cos ( u , v ) =
•
r −3 r 9
12
projur v = ⋅ u = − , 0, −
25
25
25
r 3
medida algébrica da projur v =
5
•
6.
−3
•
9 + 16 ⋅ 1 + 4
=−
3
5 5
=−
3 5
⇒
25
3 5
25
r r
( u , v ) = arccos −
{
}
r r r
Cossenos diretores de um vetor. Fixada uma base ortonormal i , j , k , chamamos cossenos
r r r
r
diretores de v , v ≠ 0 , os cossenos dos ângulos que v forma com os vetores da base.
( )
r
r r
r r
r r
r r
r
Sejam α = ( v , i ) , β = ( v , j ) e γ = v , k . Para v = xi + yj + zk , temos as seguintes expressões:
r r
r r
r r
v ⋅i
x
v⋅ j
y
v ⋅k
z
cos α = r r = r ; cos β = r r = r ; cos γ = r r = r
v
v
v
v ⋅i
v⋅ j
v⋅k
r
v x y z
Logo, r = r , r , r = ( cos α , cos β , cos γ ) , ou seja, as coordenadas de um versor são as
v v v v
coordenadas dos cossenos diretores do vetor e, portanto, cos 2 α + cos 2 β + cos 2 γ = 1 .
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
17
PRODUTO VETORIAL
1. Orientação do espaço
Consideremos as bases e1 , e2 , e3 e f1 , f 2 , f 3 tais que possamos expressar
} {
{
}
f1 = a1 e1 + a2 e2 + a3 e3 ,
f 2 = b1 e1 + b2 e2 + b3 e3 ,
f 3 = c1 e1 + c2 e2 + c3 e3 .
a1 a2
Se ∆ = b1 b2
a3
{
} {f , f , f } têm mesma orientação. Se
b3 > 0 , dizemos que as bases e1 , e2 , e3 e
1
2
3
c1 c2 c3
∆ < 0 , elas têm orientações opostas.
As bases ficam divididas em duas classes. As bases da classe fixada são ditas positivas e as de
orientação oposta à classe fixada são ditas negativas.
Adotamos, por convenção, uma base positiva do espaço R³, a que é formada por três vetores cujos
sentidos são os sentidos dos dedos médio, indicador e polegar da mão esquerda, nesta ordem.
Exemplos:
a) i, j , k é uma base positiva.
{ }
b) { j , i, k } é uma base negativa, pois tem orientação oposta à base {i, j , k }.
c) {k , i, j} é uma base positiva, pois tem a mesma orientação da base {i, j , k }.
2. Definição
Fixada uma orientação no espaço, o produto vetorial dos vetores u e v , indicado por u × v , é um
vetor tal que:
2.1. se u e v são LD, então u × v = 0 ;
2.2. se u e v são LI e θ = u, v , então
( )
a) u × v = u ⋅ v ⋅ sen θ ,
b) u × v é ortogonal a u e a v ,
c) u , v e u × v formam uma base positiva.
Exemplos:
I) Dada a base ortonormal positiva i, j , k
{
}
a) i × i = j × j = k × k
b) i × j = k , j × k = i, k × i = j
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
18
II) Sejam u e v vetores com representantes no plano α , conforme a figura, onde u = 4 , v = 5 e
(u,v ) = 30° . Temos,
u × v = u ⋅ v ⋅ sen 30° = 4 ⋅ 5 ⋅
1
= 10
2
e
v × u = v ⋅ u ⋅ sen 30° = 5 ⋅ 4 ⋅
1
= 10
2
3. Propriedades
Quaisquer que sejam os vetores u , v e w e qualquer que seja o número real k, vale:
3.1.
u×u = 0
3.2.
3.3.
3.4.
( )
k (u × v ) = (k u )× v = u × (k v )
u × (v + w) = (u × v ) + (u × w)
u×v = − v×u
4. Expressão cartesiana do produto vetorial
Fixada uma base ortonormal positiva i, j , k e dados os vetores u = ( x1 , y1 , z1 ) e v = ( x2 , y2 , z2 ) , o
{
}
produto vetorial de u e v é dado por
u×v =
y1
y2
z1
z
⋅i + 1
z2
z2
x1
x
⋅ j+ 1
x2
x2
y1
⋅k
y2
que é o desenvolvimento de Laplace em relação à primeira linha do determinante simbólico
(
)(
i
j
k
x1
y1
z1 .
x2
y2
z2
Prova: u × v = x1 i + y1 j + z1 k × x2 i + y2 j + z2 k
)
= ( x1 x2 )i × i + ( x1 y2 )i × j + ( x1 z2 )i × k + ( y1 x2 ) j × i + ( y1 y2 ) j × j + ( y1 z2 ) j × k +
+ (z1 x2 )k × i + ( z1 y2 )k × j + ( z1 z2 )k × k
u × v = ( y1 z2 − z1 y2 )i + ( z1 x2 − x1 z2 ) j + ( x1 y2 − y1 x2 )k
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
19
Exemplo: Dados u = (1,2,−2 ) e v = (1,0,−1) , temos
i
j
k
u×v = 1 2 − 2 =
−1
1 0
2 −2
−1
0
i+
−2 1
−1 1
1 2
j+
1 0
k = −2i − j − 2k
ou
u × v = (− 2,−1,−2 )
Regra prática: 1
1
2
0
-2
-1
1
1
2
0
u × v = ( -2 , -1 , -2 )
5. Interpretação geométrica do produto vetorial
Seja ABCD o paralelogramo abaixo
D
C
h
θ
A
B
S ABCD = AB ⋅ h , onde h = AD ⋅ senθ
S ABCD = AB ⋅ AD ⋅ senθ
S ABCD = AB × AD
Observamos também que a área do triângulo ABD é dada por S ABD =
AB × AD
2
.
Exercício resolvido
De um triângulo ABC sabemos que AB = 2, AC = 3 e AB ⋅ AC = 3 3 . Determine a área deste
triângulo.
(
)
AB ⋅ AC = 3 3 ⇔ cos AB, AC =
S ABC =
AB × AC
2
=
(
)
3 3
3
1
=
⇔ sen AB, AC =
2⋅3
2
2
2 ⋅ 3 ⋅ 12 3
= u.a.
2
2
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
20
PRODUTO MISTO
1. Definição
r r r
Sejam u , v e w vetores quaisquer. O produto misto dos vetores u , v e w , indicado por [u , v , w] , é o
( )
número real u × v ⋅ w .
Exemplo: Dados os vetores u = (1,0,−1), v = (− 1,3,2) e w = (1,3,2) , tem-se:
r r r
[u , v , w] = ( (1, 0, −1) × ( −1,3, 2 ) ) ⋅ (1,3, 2 ) = ( 3, −1, 3) ⋅ (1,3, 2 ) = 3 − 3 + 6 = 6
2. Expressão cartesiana do produto misto
Fixada uma base ortonormal i, j , k e dados os vetores
{
}
u = x1 i + y1 j + z1 k
v = x2 i + y 2 j + z 2 k
w = x3 i + y 3 j + z 3 k
tem-se o produto misto
y1
z1
y2
z2
x1
r r r
[u , v , w] = x2
y1
z1
y2
z2
x3
y3
z3
r r r
[ u , v , w] =
⋅ x3 +
z1
x1
z2
x2
⋅ y3 +
x1
y1
x2
y2
⋅ z3
Exemplo: Dados os vetores u = (1,0,−1), v = (− 1,3,2) e w = (1,3,2) , refazendo o cálculo,
1 0 −1
r r r
[ u , v , w ] = −1 3 2 = 6
1 3
2
3. Propriedades
Quaisquer que sejam os vetores u , v e w e qualquer que seja o número real k, vale:
r r r
a. [u , v , w] = 0 ⇔ u , v e w são LD
r r r
r r r
r r r
r r r
b. k ⋅ [u , v , w] = [ ku , v , w] = [u , kv , w] = [u , v , kw]
r r r r
r r r
r r r
c. [u1 + u2 , v , w] = [u1 , v , w] + [u2 , v , w]
r r r
r r r
r r r
d. [u , v , w] = [ v , w, u ] = [ w, u , v ]
r r r
r r r
e. [u , v , w] = − [ v , u , w]
r r r
r r r
r r r
f. [u , u , v ] = [ v , u , u ] = [u , v , u ] = 0
A demonstração de todas estas propriedades é imediata, usando as propriedades dos determinantes.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
21
4. Interpretação geométrica do produto misto
r r r
r r r
O módulo de [u , v , w] é igual ao volume do paralelepípedo de arestas u , v e w .
uuur r uuur r uuur r
Consideremos o paralelepípedo de arestas AB = u , AD = v e AE = w .
O volume deste paralelepípedo é dado por VP = Sb ⋅ h , onde
Sb = u × v e h = w ⋅ cosθ .
r
r
Lembremos que u × v tem a direção da altura h do paralelepípedo, pois é ortogonal a u e a v , do
r r r
que observamos que θ = ( w, u × v ) .
r r uur
r r ur
r r r
Logo, VP = u × v ⋅ w ⋅ cos θ = u × v ⋅ w = [u , v , w]
(
)
Exemplo: Considere o paralelepípedo da figura abaixo. Em relação a uma base ortonormal
uuur
uuur
uuur
positiva são dados os vetores AB = (1, 0,1), BE = (1,1,1) e AD = ( 0,3, 3) . Calcule:
a) o volume do paralelepípedo ABCDEFGH;
b) a altura deste paralelepípedo em relação à base ABCD.
uuur uuur uuur
uuur uuur uuur
a) VP = AB, AD, AE , onde AE = AB + BE = (1, 0,1) + (1,1,1) = ( 2,1, 2 )
1 0 1
[AB, AD, AE ] = 0
3 3 = − 3 e o volume do paralelepípedo é − 3 = 3 .
2 1 2
uuur uuur uuur
AE ⋅ AB × AD
uuur
uuur uuur
r uuur AE =
b) h = proj uuu
,
onde
AB × AD = (1, 0,1) × ( 0,3, 3) = ( −3, −3, 3) ,
uuu
r
uuur
( AB× AD )
AB × AD
(
)
(
)
uuur uuur
uuur uuur uuur
3
3
AB × AD = 3 3 e AE ⋅ AB × AD = −3 . Daí, h =
=
.
3
3 3
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
22
r r r
Também podemos afirmar que o módulo de [u , v , w] é igual a seis vezes o volume do tetraedro de
r r r
arestas u , v e w .
AB = u
AD = v
AE = w
1
O volume do tetraedro ABDE é dado por VT = ⋅ S b ⋅ h , onde Sb =
3
r r
1 u × v uur
1 r r ur 1 r r ur
⋅ w ⋅ cos θ = ⋅ u × v ⋅ w = ⋅ u, v, w
Logo, VT = ⋅
3 2
6
6
(
r r
u×v
2
e h = w ⋅ cosθ .
)
Exercício
r
Em relação a uma base ortonormal positiva são dados os vetores u = (1, 2, −1) ,
r
r
r
v = ( 0,3, −4 ) , w = 1, 0, 3 e t = ( 0, 0, 2 ) . Calcule o volume do tetraedro ABCD, sabendo
uuur
r
uuur uuur
r uuur
que AB = projvr u , AC é o vetor oposto do versor de w e BD = projtr ( AB × AC ) .
(
)
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
23
REFERÊNCIAS BIBLIOGRÁFICAS
1. CAMARGO, Ivan de, BOULOS, Paulo. Geometria Analítica. 3ª ed. revisada e ampliada –
São Paulo: Prentice Hall, 2005.
2. STEINBRUCH, Alfredo, WINTERLE Paulo, Geometria Analítica, Makron Books.
3. CAROLI, Alésio, CALLIOLI Carlos A., FEITOSA Miguel O., Matrizes, Vetores e
Geometria Analítica, Ed. Nobel, 1991.
4. VENTURINI, Jacir J., Álgebra Vetorial e Geometria Analítica, 8ª edição (atualizada)
disponível no site www.geometriaanalítica.com.br .
5. SANTOS, Reginaldo. Um Curso de Geometria Analítica e Álgebra Linear, disponível no
site www.mat.ufmg.br/~regi .
6. LEHMANN, Charles H. Geometria Analítica, Editora Globo.
7. Apostilas Cálculo Vetorial – Professoras do Departamento de Matemática – UFBA
disponível no site www.dmat.ufba.br .
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
24
EXERCÍCIOS DE FIXAÇÃO
1) Verifique se é verdadeira ou falsa cada uma das afirmações e justifique a sua resposta.
a) AB ∈ AB
b) AB // CD ⇒ AB // CD
g) AB = CD ⇒ AB = CD
c) AB = CD ⇒ A = C e B = D
h) Se AB = CD então existe um único
plano contendo A, B, C e D.
d) AB = CD ⇒ AC ~ BD
i)
e) AB = CD ⇒ AC ∩ BD = φ
f)
AB ~ CD ⇒ AB = CD
r r r
r r
r
j) Se w = u + v , então | w |=| u | + | v | .
AB = CD ⇒ AB = CD
2) Na figura 1 os hexágonos são regulares. Em cada caso, determine a soma dos vetores indicados.
Figura 1
3) Obtenha a soma dos vetores indicados em cada caso da figura 2.
(a) ABCDEFGH é um paralelepípedo.
(b) ABCDEFGH e EFGHIJLM são cubos de arestas congruentes.
(c) O cubo ABCDEFGH tem centro O e está dividido em oito cubos congruentes por
planos paralelos às faces.
Figura 2
4) Utilize o paralelepípedo da figura 2(a) para determinar o vetor x em cada caso:
a) x = GH − HE − FE + AE + AB
b) x = HD − CF + DG + BC + AF − BE
5) Na figura 2(a), sejam u = AB, v = AH , w = AC. Obtenha representantes dos vetores x e y tais
que u + v + x = 0 e u + v + w + y = 0 .
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
25
6) O ponto P na figura 3 divide AB em dois segmentos. Expresse OP como combinação linear dos
vetores OA e OB .
A
B
P
O
.
B
A
Figura 3
D
C
Figura 4
7) Na figura 4, DC = 2 ⋅ AD . Expresse BD em função de BA e BC.
uuuur
2 uuuur
8) Sejam M, N, P e O pontos coplanares e não colineares, tais que MN = − PM . Escreva ON
5
como combinação linear de OM e OP .
uuur
1 uuur
9) Sejam A, B, C e D pontos coplanares tais que CD e CB são LI e CD = − AB .
3
a) Expresse AD como combinação linear de AC e AB.
b) Trace um representante de AD a partir da combinação linear obtida.
10) Sabendo-se que a distância entre os pontos P(−1,2,3) e Q(1, −1, z ) é 7 unidades, calcule z.
11) Demonstre que n vetores são linearmente dependentes se, e somente se, um deles é combinação
linear dos outros.
12) Estude a dependência linear dos seguintes vetores:
a) (0,0,5) e (0,0,7)
b) (5,1,3), (0,0,0) e (-1,2,3)
c) (1,0,-1)
d) (-1,-1,2), (0,1,-1) e (1,1,1)
13) Dados os vetores a = (1,1,1), b = (-1,-1,2), c = (0,1,-1) e d = (1,2,-3), pergunta-se:
a) Esses vetores são L.I. ou L.D.? Justifique a resposta.
b) Escreva um deles como combinação linear dos outros.
14) Dados os vetores u = 5m − 3n, v = 2m + n e w = (0, a,−1) , determine o valor de a para que os
vetores u, v e w sejam LD, sabendo-se que m = (− 1,0,2) e n = (1,2,0 )
15) Demonstre vetorialmente o teorema de Pitágoras.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
26
(
)
16) Dada a base i, j , k sejam:
r
r r
r r
r r
r
r
r r
a ) f1 = 2i + j + 3k , f 2 = −i + 2k , f 3 = 2i − 7 j + k
r r
r r r r
r
r
r
r r
b) g1 = i − 2 j + 3k , g 2 = j + 4k , g 3 = i − j + 7k
(
) (
)
Verifique se f 1 , f 2 , f 3 e g1 , g 2 , g 3 são bases.
17) Demonstre que a soma dos quadrados das diagonais de um paralelogramo é igual à soma dos
quadrados dos quatro lados; em outras palavras, provar que
r r2 r r2
r2
r2
u + v + u − v = 2u + 2v .
18) Verifique se os pontos A, B e C são colineares nos seguintes casos:
a) A(1,0,-1), B(1,0,0), C(5,2,1)
b) A( ½ ,0, 2), B( ½ ,-1, 2), C(2,3,1)
19) Verifique se os pontos A(2,1,0), B(1,-1,0), C(3,1,5) e D(0,-1,2) são coplanares.
r
π
r
20) Sabendo que o ângulo entre os vetores u = (2,1,−1) e v = (1, −1, k + 2) é dado por
rad ,
3
determine o valor de k .
r r
r
r
r
r
r
r
21) Qual o valor de α para que a = α i + 5 j − 4k e b = (α + 1)i + 2 j + 4k sejam ortogonais ?
r
22) Determine o valor de m para que o vetor w = (1,2, m) seja simultaneamente ortogonal aos
ur
uur
vetores v1 = (2, −1, 0) e v2 = (1, −3, −1) .
r
r
r r
r r
23) Sabendo-se que a = 3 , b = 2 e 45o é o ângulo entre a e b , calcule a × b .
r
r r r
r
r r r
24) Determine o vetor X tal que X × (i + k ) = 2(i + j − k ) e X = 6 .
Z
r r
r
25) Considere os vetores u , v e w que determinam um
tetraedro na figura. Determine:
4
a) a área da face do tetraedro oposta ao vértice O;
r
w
b) a área do paralelogramo determinado pelos vetores
r
r
v e w;
r
c) o ângulo formado entre u e o eixo X .
3
2
r
v
r
u
−2
1
O
3
Y
2
X
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
27
26) Determine a resultante das forças em cada item a seguir:
r
r
r
r
r
r
a) F1 = 80kgf , F2 = 150kgf e F3 = 180kgf
b) F1 = 120kgf , F2 = 100kgf e F3 = 120kgf
r
r
r r
27) Determine v , paralelo ao vetor u = (1,−1,2) tal que v ⋅ u = −18 .
28) Calcule x, sabendo-se que A( x,1,1) , B(1, −1, 0) e C (2,1, −1) são vértices de um triângulo de
20
.
2
29) Dados os pontos A(1,-2,3), B(5,2,5) e M(-4,2,9), determine as coordenadas dos pontos C e D,
tal que ABCD (nesta ordem) seja um paralelogramo, onde M é ponto médio do segmento AC .
área
13
r
30) A medida algébrica da projeção de um vetor v sobre o eixo f é igual a
. Sabendo-se que
3
uuur
a) o eixo f tem o mesmo sentido de AB, onde A ( 6, 2, 2 ) e B ( 8, 3, 0 ) ;
rr 6
r
b) o cos v, i =
e v = 7.
7
r
Quais as coordenadas de v ?
( )
uuur uuur uuur
31) Os vetores AB, AD e AE têm para representantes as arestas de um cubo de base ABCD, onde
uuur o 1
1
A(1,2,0), B(-1,4,1) e AE = −
,−
, 0 . Determine as coordenadas do vértice C.
2
2
o
32) Considere um ∆ABC com área igual a 4, AC = 2 e AB = i. Sabendo que um dos cossenos
diretores de AC é cosα =
2
e A(1,0,1), calcule as coordenadas do vértice B.
2
33) Do paralelogramo ABCD sabemos que B(1,2,3), C(1,-2,1) e M é ponto médio de BC. S é um
uuur 1 uuuur 2 uuur
uuuur
ponto de AM tal que DS = DM + DA e AM = (1,0,2). Calcule a área do triângulo ASD.
3
3
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
28
34) Na figura abaixo, A(0,0,0), B(1,1,0), D(-1,0,1), EM ⋅ AD = 0, AC é bissetriz do triângulo ABD
em relação ao vértice A e AE = 2 . Determine as coordenadas do vetor AM.
E
B
C
A
D
M
35) Calcule o produto misto dos vetores u = i + j + 3k , v = 2i − j + 5k e w = 4i − 3 j + k . Esses vetores
são coplanares?
36) Sendo u = i + j , v = 2i − j + 3k e w = 2 j − k , calcule a área do triângulo ABC e o volume do tetraedro
ABCD onde B = A + u , C = A + v e D = A + w.
37) Os pontos A(2,1,-1), B(3,0,1) e C(2,-1,3) são vértices de um tetraedro ABCD de volume 1.
Calcule as coordenadas do ponto D, sabendo - se que o mesmo está no eixo das ordenadas.
38) Dados a = 13, b = 2 e a ⋅b = 24 , calcule:
a) a − b
b) as coordenadas do vetor b , sabendo que os ângulos diretores de b são agudos e congruentes.
(
)
39) Dados a = −i + 3 j + mk e b = 2i + m j − k , determine m de modo que a, b, a × b seja uma base
ortogonal.
40) Dados os pontos A(0,0,1), B(2,– 1, 2), C(0,2,2) e D(t,3t, t + 1) que constituem os vértices de um
5
tetraedro ABCD, determine t sabendo que o volume deste tetraedro é .
3
uuur 1 uuur
41) De um paralelogramo ABCD temos: A(1,2,3), B(5,2,3), C(7,3,4), AB ⊥ DM e DE = DB .
3
Determine a área do triângulo MDE.
D
C
E
B
A
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
M
ERON E ISABEL
29
uuur o
42) Do tetraedro ABCD temos as seguintes informações: A(0,0,0), D(1,5,t), AB = (1,0,0),
o
1 3
8 3
e o triângulo ABC é eqüilátero. Determine as
,0 , AB ⋅ AC = 8, V ABCD =
AC = ,
3
2 2
coordenadas do vértice D.
ALGUMAS APLICAÇÕES
•
r
Considere que uma força constante F seja um vetor com direção diferente do eixo de
deslocamento de um objeto. Se a força move o objeto de um ponto P ao ponto Q sobre um
r uuur
segmento reto, o vetor deslocamento é D = PQ . O trabalho realizado por essa força sobre o
r r
objeto é o produto escalar T = F ⋅ D .
Exemplo:
1. Considere o conjunto de forças na figura ao
lado. Determine o trabalho realizado pela força
resultante dessas forças para deslocar, em linha
reta, uma partícula que está na origem até o
r
ponto Q (2, −3) . Sabendo que F1 = 120 kgf ,
r
r
F2 = 100 kgf e F3 = 120 kgf .
•
r
Seja uma força F atuante em uma partícula única,
situada no ponto P , cuja posição relativamente à
origem O do referencial inercial é dada pelo vetor
r
r
r
r (veja figura). Esses dois vetores, r e F , estão
contidos num plano.
r
O momento vetorial ou vetor torque τ atuante sobre a
partícula em relação á origem O é definido em temos do
r
r
produto vetorial de r e F , isto é:
r r r
τ =r×F .
O torque possui dimensões de força multiplicada por distância; em termos das nossas dimensões
fundamentais M, L e T, ele tem dimensões ML²T-2, que são idênticas à do trabalho. Entretanto, torque
e trabalho são grandezas físicas muito diferentes: o torque é um vetor, enquanto o trabalho é um
escalar. A unidade de torque pode ser o Newton-metro (N.m) ou libra-pé (lb.ft), entre outras
possibilidades.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
30
Exemplo:
r
Suponha que uma força F com magnitude de 3 lb
é aplicada ao conjunto alavanca-haste mostrado na
figura ao lado.
r
a) Determine as coordenadas da força F e do
r
r
vetor r que liga a origem ao ponto onde F é
aplicada;
r
b) Determine o vetor torque de F em relação à
origem.
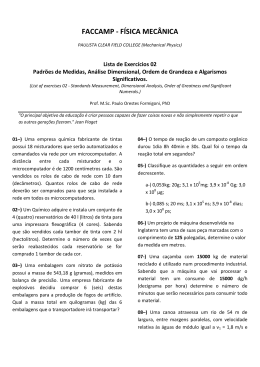
•
Na molécula do metano (CH4), o átomo de carbono ocupa o centro de um tetraedro regular em
cujos vértices estão os átomos de hidrogênio. Determine o ângulo entre duas das valências do
carbono.
Solução. O resultado deste problema está presente em todos os cursos de química orgânica. O estranho
número fornecido pelo professor é aceito pelos alunos, mas, em geral, eles não têm a menor idéia de
como esse resultado foi obtido. Para calcular esse ângulo, a geometria analítica é um método
imbatível, aliada, é claro, com alguma inventividade.
Em um sistema de coordenadas no espaço, consideremos inicialmente um cubo de aresta 2 (para
facilitar) com um vértice na origem, outro no eixo X, outro no eixo Y e outro no eixo Z. Não é difícil
escolher quatro vértices desse cubo que formem um tetraedro regular.
Os pontos A(0, 0, 0) , B (2, 2, 0) , C (0, 2, 2) e D (2, 0, 2) formam um tetraedro regular (uma vez que as
distâncias entre dois quaisquer deles são diagonais de faces do cubo) e são ocupados pelos
hidrogênios.
O ponto P (1,1,1) , centro do cubo e também centro do tetraedro,
está ocupado pelo carbono.
ˆ ,
O resto é fácil. Para calcular, por exemplo, o ângulo APB
consideremos os vetores:
r uuur
u = PA = ( −1, −1, −1) e
r uuur
v = PB = (1,1, −1) .
O cosseno do ângulo entre eles é: cos α =
−1 − 1 + 1
1
=−
3
3 3
Com uma calculadora, determinamos um valor
aproximado para esse ângulo: α = 109°28'16.395 '' .
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
muito
31
RESPOSTAS DOS EXERCÍCIOS
1) a) V
b) V
c) F
2) a) DB
b) FC
c) FC
d) OD
c) AF
4) a) AG
b) HD
2
1
7) BD = BA + BC
3
3
3) a) AF
b) BL
d) V
6) OP = (1 − λ )OA + λ OB, λ ∈ R .
1
AB
3
b) LD
e) F
9) a) AD = AC −
10) z = -3 ou z = 9
12) a) LD
c) LI
14) a= – 1
(
)
(
f) F
d) LI
g) V
h) F
i) V
j) F
5) x = GA e y = FA
3
2
8) ON = OM + OP
5
5
b) d = −b + c
13) a) L.D.
)
16) f1 , f 2 , f 3 é base e g1 , g 2 , g 3 não é base.
18) a) Não
b) Não
22) m = – 5
19) Não são coplanares
21) α = −3 ou α = 2
20) k = – 4
24) X = (− 1,2,1)
23) 3
153
2
b) 18 c) arccos
2
3
26) a) FR = 75 3 + 90 2 ,−5 − 90 2
25) a)
(
27) v = (− 3,3,−6 )
)
(
b) FR = 60 3 − 120,−40
)
28) x = 1,2 ou x = 2
29) C (− 9,6,15), D(− 13,2,13)
17 6
30) v = (6,−3,−2 ) ou v = 6, ,
5 5
2 −2 8− 2
31)
,
, 2 2 + 1
2
2
32) (9,0,1)
33) S =
21
3
[
1 1
34) AM = − ,0,
2 2
3 3
1
eV=
2
2
2 3 2 3 2 3
38) a) 5 5
b)
,
,
3
3
3
36) S =
40) t = 2 ou t = -2
]
35) u , v, w = 26; não
37) (0,2,0) ou (0,-1,0)
39) m = 1
41) S =
2
3
42) (1,5,2) ou (1,5,-2)
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
32
Baixar