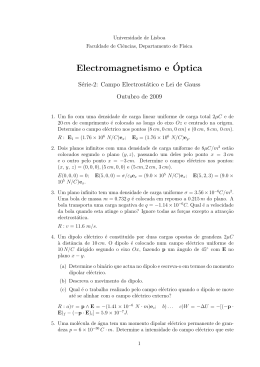
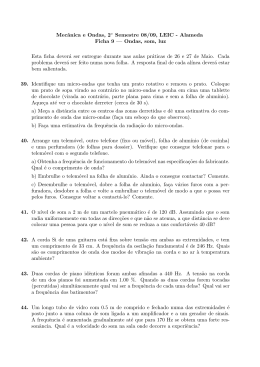
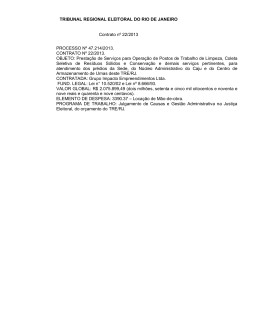
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 DIAGNÓSTICO DE FALHAS EM MOTORES DE INDUÇÃO UTILIZANDO SUPERFÍCIE DE RESPOSTA E ALGORITMOS GENÉTICOS Lı́via de Fátima Silva Mendes∗, Lane M.R. Baccarini†, Lenir de Abreu Júnior‡ ∗ Departamento de Engenharia Elétrica, Universidade Federal de São João del Rei Praça Frei Orlando 170 − 36307 352 − São João del Rei − MG, Brasil Emails: livia− eletrica− [email protected], [email protected], [email protected] Abstract— The three-phase induction motors are quite used today. However, several failures during operation can occur, including: short circuit between turns, broken bars, among others. Failures initial short circuit between turns are difficult to diagnose due to the low impact they cause on the characteristics of the engine and also have a short time of evolution, requiring continuous monitoring of the plant to prevent degradation or even loss of these engines. Besides the loss of the equipment other concern about the occurrence of faults is the economic necessity to ensure high levels of availability and reliability of induction motors. It is therefore important to develop methods to detect these faults at an early stage that may be employed in a real plant. In this work a method is developed diagnostic short circuit and broken bars in induction motors from current sensors, using as an analysis tool for modeling the response surface optimized with the aid of Genetic Algorithms. The results were satisfactory from an enhancement method for use in an industrial environment is required. Keywords— Fault diagnosis, three-phase induction motors, response surface methodology, genetic algorithms, non-invasive method. Resumo— Os motores de indução trifásicos são bastante utilizados atualmente. Entretanto, durante seu funcionamento diversas falhas podem ocorrer, tais como: curto-circuito entre espiras, barras quebradas, entre outras. As falhas de curto-circuito inicial entre espiras são de difı́cil diagnóstico devido ao baixo impacto que elas causam nas caracterı́sticas do motor e também possuem um tempo curto de evolução, necessitando monitoramento contı́nuo da planta para evitar a degradação ou até mesmo a perda destes motores. Outra preocupação acerca das ocorrências de falhas é a necessidade econômica em se garantir altos ı́ndices de disponibilidade e confiabilidade de motores de indução. Portanto é importante o desenvolvimento de métodos de detecção dessas falhas em estágio inicial que possam ser empregados em uma planta real. Neste trabalho é desenvolvido um método de diagnóstico de curto-circuito e barras quebradas de motores de indução a partir de sensores de corrente, utilizando como ferramenta de análise a modelagem pela Superfı́cie de Resposta, otimizada com o auxı́lio de Algoritmos Genéticos. Os resultados obtidos foram satisfatórios sendo necessário um aprimoramento da metodologia para utilização em ambiente industrial. Palavras-chave— Diagnóstico de falhas, motor de indução trifásico, metodologia de Superfı́cies de Resposta, Algoritmos Genéticos, método não invasivo. 1 Introdução desalinhamento, desbalanceamento de massa, e externas: sobrecarga mecânica, desequilı́brio de fases, subtensão, sobretensão e presença de harmônicos (Filho, 2008). O aumento da capacidade produtiva dos equipamentos e consequentemente das plantas industriais, tem influenciado de forma sensı́vel a evolução das técnicas de produção. As etapas do ciclo de vida desses equipamentos exigem elevados investimentos, exigindo um alto ı́ndice de desempenho para garantir o retorno adequado a esses investimentos. A redução do número de falhas e o gerenciamento das suas severidades contribuem para o alcance de altos nı́veis de desempenho e também aumentam a segurança da planta industrial. A estratégia de manutenção adequada para cada equipamento é ferramenta de grande importância para o processo produtivo. Atualmente contamos basicamente com três estratégias de manutenção: corretiva, preventiva e preditiva. Um levantamento realizado pela Plant Performance Group quantificou o impacto da inclusão de técnicas de manutenção preditiva como parte chave da filosofia de gerencia de manutenção, seus resultados mostraram melhorias em custos de manutenção, falhas não programadas da máquina, tempo parado para reparo, redução de peças no estoque além de recompensas diretas e indiretas de hora extra (Almeida, 2010). Uma parcela significativa das plantas industriais é composta por motores de indução trifásicos (MIT), pois seu funcionamento permite o acionamento de praticamente todos os tipos de carga. Embora a construção destes motores seja robusta, o fato de serem expostos a diversos ambientes e condições de operação pode provocar diversas falhas durante a operação. As falhas podem ser internas: barras quebradas e/ou trincadas, rolamentos danificados, curto-circuito entre espiras, excentricidade, Os enrolamentos do estator de motores de indução trifásicos são submetidos a estresse induzido por diversos fatores: efeitos térmicos; vibrações mecânicas; estresse de tensão em acionamentos a frequência variável (Fang and Hongzhong, 2006). A deterioração do isolamento 2946 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 normalmente começa com curto-circuito envolvendo poucas espiras, a corrente de falta é muito elevada e provoca aquecimento localizado que rapidamente se estende para outras seções do enrolamento (Tallam et al., 2003). curto-circuitos e barras quebradas em motores de indução trifásicos, por meio da leitura de corrente e tensão, com baixo ı́ndice de falsos alertas e que pode ser implementado para diagnóstico em tempo real. O tempo de evolução de falhas de curtocircuito entre espiras para as demais falhas (curto-circuito entre bobinas de uma mesma fase e entre bobinas de fases diferentes e, curto-circuito entre fase e terra) não pode ser estimado, pois depende das condições de operação do motor. O que se sabe é que a evolução é rápida, justificando, dessa forma, o monitoramento contı́nuo do motor para a detecção da falha (Sottile et al., 2000). 2 2.1 Conceitos preliminares Modelo Assimétrico do Motor de Indução Trifásico A simulação do modelo dinâmico do motor de indução trifásico permite analisar o comportamento de motores em diversas condições de operação, assim podemos testar a viabilidade de aplicação de métodos diversos antes da realização de ensaios experimentais, reduzindo tempo e custo de pesquisa. As metodologias convencionais de diagnóstico de falhas vêm sendo substituı́das pelas técnicas de inteligência artificial, que possibilitam uma forma mais prática de análise sendo, em muitos casos, desnecessária a ajuda de especialistas de manutenção (Brito, 2002). Os métodos baseados na análise da corrente elétrica (MCSA) não são invasivos e não requerem a interrupção da operação dos sistemas de acionamentos (Benbouzid, 2000). A medição é feita por sensores comuns (TCs transformadores de corrente) e muitas vezes já estão presentes na aplicação a ser monitorada (Baccarini et al., 2010). O modelo simétrico do MIT é conhecido na literatura, porém para a simulação de falhas foi utilizado o modelo assimétrico desenvolvido em (Baccarini, 2005), apresentado nas seções 2.1.1 e 2.1.2. 2.1.1 Curto-circuito Para a inclusão do efeito de curto-circuito no modelo do MIT, definimos o percentual de espiras em curto pela equação (1), onde nas é o número total de espiras da fase, nas1 é o número de espiras sem curto e nas2 é o número de espiras em curto: O grande problema dos estudos realizados é a situação de falso alarme, ou seja, diagnóstico de curto-circuito na situação de operação normal, isto implica em intervenção desnecessária, gera gastos e reduz produção. µ= nas2 nas2 = nas1 + nas2 nas (1) A aplicação da Transformada de Park nas tensões do estator (Vas , Vbs e Vcs ) às transforma para o eixo dq0, obtendo-se as seguintes expressões com a parcela de curto-circuito µ: O método da Superfı́cie de Resposta (SR) é um grande aliado na detecção de falhas em tempo real pois, a partir de métodos estatı́sticos, cria funções polinomiais para representar a resposta de um experimento numérico em termos de variáveis independentes. Estas funções auxiliam na redução da complexidade na busca de solução para o problema em questão (Neves, 2004; Silva et al., 2008). Portanto, utilizando como variáveis independentes os espectros das correntes do motor relacionados à determinada falha, é possı́vel obter modelos simplificados que sejam capazes de diagnosticar a ocorrência da falha. 2 dλqs vqs + µrs if cos(θ) = rs iqs + + ωλds 3 dt (2) 2 dλds vds + µrs if sin(θ) = rs ids + + ωλqs 3 dt (3) 1 dλ0s v0s + µrs if = rs i0s 3 dt (4) As equações do circuito do rotor são idênticas às do rotor do modelo tradicional. As equações em coordenadas dq0 para o cálculo dos fluxos do estator e do rotor são: Diversos modelos podem ser obtidos para um mesmo conjunto de dados, logo, com o objetivo de construir o modelo que forneça maior quantidade de acertos, Algoritmos Genéticos (AG) podem ser utilizados. Neste trabalho é desenvolvido um método robusto não invasivo que dispensa o auxı́lio de especialistas, utilizando a modelagem pela SR aliada à MCSA, capaz de identificar a presença de 2 λds = Ls ids + Lm idr − µLs if cos(θ) 3 (5) 2 λqs = Ls iqs + Lm iqr − µLs if sin(θ) 3 (6) µ Lls if sin(θ) 3 (7) λ0s = Ls iqs + Lm iqr − 2947 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 2 λdr = Lr idr + Lm ids − µLm if cos(θ) 3 (8) 2 λqr = Lr iqr + Lm iqs − µLm if sin(θ) 3 (9) na Figura 2, sendo Re , Le , Rb e Lb a resistência e indutância da parte dos anéis e a resistência e indutância das barras do rotor, respectivamente. Então, considerando uma corrente nula na malha da barra quebrada, calcula-se as novas correntes das duas malhas que contêm essa barra. No passo subsequente, os cálculos dos estados do motor serão dependentes dessas novas correntes (Cunha et al., 2003). A corrente if representa a corrente nas espiras em curto-circuito. A tensão e o enlace de fluxo nas espiras em curto-circuito podem ser explicitados em função das correntes de eixo dq0. Assim: Vas2 = µrs (ids cos(θ) + iqs sin(θ)) + dλas2 = rf if (10) dt λas2 = µLls (iqs sin(θ) + ids cos(θ) − if ) + ... Figura 2: Representação do circuito das barras do rotor (Cunha et al., 2003). µLm (iqs sin(θ) + ids cos(θ) + ... 2 iqr sin(θ) + idr cos(θ) − µif ) (11) 3 Para o diagnóstico de barras quebradas devese observar as componentes de corrente nas frequências laterais como pode ser observado na Figura 3. As frequências laterais são obtidas pela equação (13). O conjugado desenvolvido pelo motor é obtido pela equação (12). O 1ž termo representa o conjugado desenvolvido pelo motor que é idêntico ao conjugado do motor simétrico. O 2ž termo é consequência da falha de curto-circuito e depende do número de espiras em curto e da corrente de curto-circuito. 3p T = Lm (iqs idr − ids iqr ) + ... 22 p µLm if (iqr sin(θ) − idr cos(θ)) 2 flat = f ± 2sfr (13) sendo: s : o escorregamento do motor que é dado por s = ffr ; f : a frequeência da rede de alimentação; fr : a frequência de rotação do motor. (12) A presença da componente de terceiro harmônico 180 Hz no espectro de frequência dos sinais de correntes, como mostra a Figura 1, pode indicar curto-circuito entre espiras do estator ou desequilı́brio na rede de alimentação. 20 Amplitude [dB] 10 0 −10 −20 −30 −40 −50 0 X: 57.28 Y: −43.01 50 X: 62.7 Y: −44.02 100 Frequência [Hz] 150 200 Figura 3: Espectro de corrente de um MIT com presença de barras quebradas. Figura 1: Espectro de corrente de um MIT com presença de curto-circuito nas espiras do estator. 2.1.2 2.2 Superfı́cies de Resposta A metodologia de superfı́cie de respostas (MSR) foi introduzida na década de 50 e pode ser definida como um conjunto de técnicas matemáticas e estatı́sticas para a modelagem e análise de problemas nos quais a resposta de interesse é influenciada por diversas variáveis (Montgomery, 2001). O objetivo da MSR é Barras quebradas A condição de barras quebradas é simulada representando cada barra do rotor e segmentos dos anéis por circuitos RL em série como observa-se 2948 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 obter uma relação funcional aproximada entre a resposta de interesse (saı́da) e as variáveis independentes (entradas) (Vieira Junior et al., 2010). A MSR é composta por planejamento experimental e análise de experimentos, que procura relacionar respostas com os nı́veis de fatores quantitativos que afetam essas respostas (Box and Draper, 1987). população inicial de N indivı́duos é medida a qualidade destes por meio dos seus valores de fitness (ou aptidão) e, então, são selecionados aqueles que participarão do processo de reprodução a fim de atender os operados genéticos de cruzamento (pc ) e mutação (pm ). As etapas do algoritmo são realizadas em sequências evolutivas e limitadas pelo número máximo de gerações Nger , até que uma solução que atenda aos requisitos de convergência do método seja encontrada após a evolução de sua população pela função objetivo, esta que foi adotada da melhor forma a representar o modelo do problema que deseja-se otimizar. Para o problema proposto foi sugerido a utilização do algoritmo genético de codificação real mono objetivo, visando maior precisão e menor esforço computacional, definido este através das quantidades máxima de gerações x quantidade de indivı́duos da população. A seguir é mostrado um pseudo-código do algoritmo utilizado na obtenção dos modelos. O algoritmo foi implementado com o auxı́lio do softTM ware MATLAB . Na maioria dos problemas em superfı́cie de resposta, a forma do relacionamento entre as variáveis dependentes e independentes é desconhecida. Assim, o primeiro passo é encontrar uma aproximação para o relacionamento entre a variável resposta (y) e as variáveis independentes (fatores). Geralmente utiliza-se de uma regressão polinomial de baixo grau em alguma região das variáveis independentes. O modelo de regressão polinomial de primeiro grau é dado pela equação (14) e o de segunda ordem pela equação (15), sendo β os coeficientes do polinômio, x as variáveis independentes e ϵ os erros de estimação do modelo. Y = β0 + β1 x1 + ... + βk xk + ϵ (14) Algoritmo 1 k←0 Y = β0 + k ∑ i=1 βi xi + k ∑ 2 Escolhe os testes b 3 Gera matriz X b 4 Gera população inicial Y βii x2i + ... c′ X) b −1 X c′ Yb Calcula b′ s ←b b = (X Avalia população inicial enquanto (erro < tol ou cont < Nger ) faça Seleção Reprodução . Cruzamento . Mutação Avalia nova população Condição de Parada fim Retorna melhor indivı́duo (y e b) 16 Análise do número de acertos i=1 k ∑ k ∑ βij xi xj + ϵ 5 6 7 8 9 10 11 12 13 14 15 (15) i=1 j>1 Para estimar os coeficientes do modelo (β) normalmente utiliza-se o método dos mı́nimos quadrados, para tal é necessário reescrever as equações (14) e (15), na forma matricial, conforme mostrado na equação (16), e então aplica-se o método como mostrado na equação (17). b βb + ϵ. Yb = X (16) −1 c′ X) b c′ Yb . βb = (X X (17) 3 Para assegurar boa precisão é necessário um número mı́nimo de 2k pontos, onde k é o número de variáveis independentes a serem estudadas. Para estimar os coeficientes do modelo normalmente usa-se o método dos mı́nimos quadrados. 2.3 3.1 Metodologia Testes de simulação Por meio do modelo assimétrico do Motor de Indução Trifásico foi simulado um motor com os parâmetros similares ao utilizado para nos testes experimentais, 3CV, 220V, 60Hz, 4 polos, rotor gaiola, resistência do estator Rs = 2, 9115Ω, resistência do rotor Rr = 1, 6975Ω, indutância própria do estator Xls = 3, 39282Ω, indutância própria do rotor Xlr = 2, 03569Ω e indutância mútua Xm = 71, 06073Ω, adotando percentuais de curto-circuito entre 1% e 3% do total de espiras, de 0 a 2 barras quebradas, tensão de alimentação entre 97% e 103% do valor nominal e carga conforme faixa (0, 4Tn < Tmotor < 1, 2Tn ), Algoritmos Genéticos São procedimentos computacionais de busca e otimização, cujo funcionamento é inspirado nos processos naturais de seleção e refinamento genético (Goldberg, 1989). Para seu uso, uma forma de representar as soluções do problema deve ser definida, ou seja, uma representação genética dessas soluções. A partir de uma determinada 2949 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 tal que Tn é o torque nominal. As simulações foTM ram realizadas utilizando o software MATLAB . Foram criados dois conjuntos de dados, um foi utilizado para construção e teste dos modelos e o outro para validação. Para a criação de cada conjunto de dados foram realizadas 100 simulações sem falha, 100 simulações com curtocircuito e 100 simulações com barras quebradas. Foram extraı́das as amplitudes das componentes fundamentais das três correntes (Iaf , Ibf e Icf ), as amplitudes das componentes de terceiro harmônico das três correntes (Ia3 , Ib3 e Ic3 ), as amplitudes da frequência lateral esquerda das três correntes (Ial , Ibl e Icl ), as amplitudes das três tensões (Vaf , Vbf e Vcf ), as amplitudes das componentes de terceiro harmônico das três tensões (Va3 , Vb3 e Vc3 ). Figura 4: Bancada de testes. 3.2.1 Para cada banco de dados foram construı́das e validadas as superfı́cies de resposta de primeira ordem e de segunda ordem, utilizando como variáveis naturais: • as amplitudes das componentes fundamentais das três correntes (Iaf , Ibf eIcf ) e as amplitudes das componentes fundamentais das três tensões (Vaf , Vbf e Vcf ). Os resultados obtidos foram convertidos para a escala de decibéis devido à baixa sensibilidade do sistema diante da presença do curto-circuito inicial entre espiras e das barras quebradas. 4 Foram construı́das e validadas as superfı́cies de resposta de primeira ordem e de segunda ordem, utilizando como variáveis naturais: Resultados Os bancos de dados utilizados para a construção das superfı́cies foram gerados com baixos valores de falhas, portanto é possı́vel identificar a presença destes ainda em estágio inicial, evitando que a falha intensifique e cause perda do motor. • as amplitudes da frequência lateral esquerda das três correntes (Ial , Ibl e Icl ) e as amplitudes das componentes fundamentais das três correntes (Iaf , Ibf e Icf ); 4.1 • as amplitudes da frequência lateral esquerda das três correntes (Ial , Ibl e Icl ) e as amplitudes das componentes de terceiro harmônico das três correntes (Ia3 , Ib3 e Ic3 ). Testes de simulação Inicialmente são selecionados os testes que serão utilizados para o ajuste dos modelos. Esses testes são escolhidos aleatoriamente a partir de um conjunto de dados extraı́dos das soluções ótimas encontradas através do AG. A matriz Yb (população inicial de tamanho N ) foi formada de valores aleatórios nas seguintes faixas: valores entre {−2, 2} para pontos correspondentes a testes de operação normal, valores entre {4, 6} para pontos correspondentes a condição de curto-circuito e valores entre {9, 11} para pontos correspondentes a condição de barra quebrada. Então, por meio da equação (17), foram calculados os N modelos correspondentes. As variáveis foram escaladas para simplificação dos cálculos. 3.2 Construção das Superfı́cies de Resposta Testes experimentais Foram realizados testes experimentais apenas para a condição de curto-circuito em uma bancada de testes apresentada na Figura 4. O motor utilizado para os testes possui os enrolamentos do estator expostos, possibilitando a inserção de curto-circuito controlado por meio de um banco de resistências. Realizaram-se ensaios com curto-circuito entre 3 espiras e sem curto-circuito, avaliando as variações de tensão e carga aplicadas ao motor. A carga foi aplicada ao eixo do motor através uma máquina de corrente contı́nua atuando como gerador. Os resultados foram coletados por meio da placa de aquisição da TM National Instruments e o software LabView . De posse do conjunto de dados foram adotados os mesmos procedimentos dos testes de simulação, anteriormente já expostos. Utilizando o conjunto de dados para teste foi calculado o percentual de acertos do modelo. Com isso, buscou-se um modelo que seja capaz de fornecer um elevado percentual de acertos para validação e que se ajuste bem aos pontos utilizados em sua obtenção. Foi considerado como acerto um ponto calculado pelo modelo que se localize na faixa esperada ou seja, foi esperado que o modelo forneça respostas menores que 2, 5 para dados relativos a operação normal, entre {2,5 e 7,5} para pontos relativos a operação com curto-circuito e superiores a 7, 5 para 2950 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 pontos relativos a operação com barras quebradas. Percentual de falsos alertas = 0, 00%. Como critério de parada do Algoritmo Genético foi utilizado a estabilização do valor de fobjetivo em função do número máximo de gerações Nger . Os valores das fobjetivo foram comparados, dentre as gerações pertencentes às gerações anteriores que representam 10% do número máximo de gerações, nesse caso dez últimas gerações de fobjetivo foram comparados e, quando a variação entre eles (erro) for menor que uma tolerância (tol) pré-estabelecida, assumi-se que o ótimo foi encontrado e o algoritmo se encerra. Assim, adotou-se N = 100 , Nger = 100 e tol = 0, 001. Os valores dos operadores (pc = 0, 85) e (pm = 0, 05) se mostraram suficientes para análise do problema. • Superfı́cie de Resposta de segunda ordem Construção da Superfı́cie de Resposta F alha = 17, 6550 + 79, 8515X1 − 35, 1353X2 − ... 44, 5837X3 − 95, 3729X4 + 57, 0920X5 + ... 38, 2167X6 − 6, 6103X12 − 1, 4035X22 + ... 2, 8598X32 − 1, 3119X42 − 0, 0876X52 − ... 0, 1087X62 + 11, 3726X1 X2 − 2, 7712X1 X3 + ... 7, 2083X1 X4 − 1, 9808X1 X5 − 0.4898X1 X6 − ... 8, 9914X2 X3 − 4, 4698X2 X4 − 6, 5496X2 X5 + ... 3, 0772X2 X6 + 3, 2952X3 X4 − 1, 5502X3 X5 − ... 0, 6777X3 X6 + 1, 6465X4 X5 + ... Para melhor visualização dos resultados, os dados para validação foram ordenados de acordo com a presença ou não de falha, tal que os primeiros 100 dados testados não possuem falha, os próximos 100 dados testados possuem curto-circuito e os últimos 100 dados testados possuem barras quebradas. 4.1.1 1, 2596X4 X6 + 0, 0197X5 X6 (19) Validação da Superfı́cie de Resposta Superfı́cie de Resposta utilizando como variáveis naturais as amplitudes da frequência lateral esquerda das três correntes (Ial , Ibl e Icl ) e as amplitudes das componentes fundamentais três correntes (Iaf , Ibf e Icf ) • Superfı́cie de Resposta de primeira ordem Construção da Superfı́cie de Resposta F alha = 23, 2129 − 0, 9631X1 + 0, 5239X2 + ... 0, 7762X3 − 0, 3453X4 + 0, 2269X5 + 0, 0926X6 (18) Figura 6: Validação da SR de segunda ordem. Validação da Superfı́cie de Resposta Percentual de acertos = 100, 00%; Percentual de falsos alertas = 0, 0%. Resposta da SR 4.1.2 Superfı́cie de Resposta utilizando como variáveis naturais as amplitudes da frequência lateral esquerda das três correntes (Ial , Ibl e Icl ) e as amplitudes da componente de terceiro harmônico das três correntes (Ia3 , Ib3 e Ic3 ) • Superfı́cie de Resposta de primeira ordem Construção da Superfı́cie de Resposta F alha = −88, 5982 − 1, 5353X1 + 0, 6584X2 + ... 1, 2284X3 − 2, 5994X4 + 1, 2042X5 + 1, 0721X6 (20) Figura 5: Validação da SR de primeira ordem. Validação da Superfı́cie de Resposta Percentual de acertos = 100, 00%; 2951 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 4.2 Testes experimentais Similar aos testes de simulação, foram obtidos os modelos para os testes experimentais, no entanto como foi analisada apenas a condição de curto-circuito devido às condições laboratoriais, não houve a necessidade da utilização das componentes de frequência lateral esquerda das correntes. 4.2.1 Figura 7: Validação da SR de primeira ordem. Percentual de acertos = 100, 00%; Percentual de falsos alertas = 0, 00%. Superfı́cies de Resposta utilizando como variáveis naturais as componentes fundamentais das três correntes (Iaf , Ibf e Icf ) e as componentes fundamentais das três tensões (Vaf , Vbf e Vcf ) Validação das Superfı́cies de Resposta • Superfı́cie de Resposta de segunda ordem Tabela 1: Porcentagem de acertos e de falsos alertas das Superfı́cies de Resposta de primeira e segunda ordem. 1l ordem 2l ordem Acertos [%] 79,4444 88,8889 Falsos alertas [%] 4,4444 1,1111 Construção da Superfı́cie de Resposta F alha = 29, 9960 − 4, 8684X1 − 1, 1363X2 + ... 6, 4078X3 + 8, 7997X4 − 11, 1343X5 + ... 2, 4671X6 − 0, 1338X12 − 0, 0132X22 − ... As Superfı́cies de Resposta construı́das para os testes de simulação apresentaram 100% de acertos nos testes de validação. Os modelos de primeira ordem e de segunda apresentaram porcentagens de acertos iguais, porém ao comparar 0, 5988X2 X3 + 0, 0039X2 X4 − 0, 0054X2 X5 + ... as Figuras 5 e 6 e as Figuras 7 e 8 observa-se que 0, 0028X2 X6 + 0, 0063X3 X4 − 0, 0042X3 X5 − ... os modelos de segunda ordem apresentam maior 0, 0093X3 X6 − 0, 1786X4 X5 − ... concentração no centro da faixa que delimita os 0, 2200X4 X6 − 0, 2010X5 X6 (21) limites da condição de falha, tornando o modelo de segunda ordem mais adequado. Validação da Superfı́cie de Resposta 1, 2412X32 + 1, 8213X42 − 0, 6046X52 + ... 0, 1211X62 + 1, 1405X1 X2 − 1, 0911X1 X3 − ... 0, 0379X1 X4 + 0, 1632X1 X5 − 0, 7492X1 X6 + ... Comparando a concentração dos pontos na validação dos modelos que foram criados a partir das variáveis naturais: amplitudes da frequência lateral esquerda das três correntes (Ial , Ibl e Icl ) e as amplitudes das três correntes fundamentais (Iaf , Ibf e Icf ) (Figuras 5 e 6), e os modelos que foram criados a partir das variáveis naturais: amplitudes da frequência lateral esquerda das três correntes (Ial , Ibl eIcl ) e as amplitudes das componentes de terceiro harmônico das três correntes (Ia3 , Ib3 e Ic3 ) (Figuras 7 e 8), observa-se que os pontos do primeiro caso foram os que apresentaram maior concentração no centro da faixa. Portanto não há necessidade de extrair as amplitudes das componentes de terceiro harmônico das correntes. Figura 8: Validação da SR de segunda ordem. Os resultados obtidos para os testes experimentais não atingiram acertos tão altos quanto os obtidos nos testes experimentais, o que é esperado tendo em vista a influência de fatores como Percentual de acertos = 100, 00%; Percentual de falsos alertas = 0, 0%. 2952 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 a qualidade do sistema de alimentação e ruı́dos no sistema de aquisição, no entanto o modelo de segundo grau apresentou resultados satisfatórios, visto que o ı́ndice de falsos alertas foi de apenas 1, 1111%. 5 em motores de indução trifásicos, PhD thesis, Universidade Estadual de Campinas. Cunha, C. C. M., Oliveira, P. S., Lyra, R. O. C. and Cardoso, B. J. F. (2003). Simulation and analysis of induction machines with rotor asymmetries., Industry Applications Conference, Vol. 2, pp. 883–889, Oct. 2003. Conclusões Apesar de se tratar de um método que gera modelos simplificados, o trabalho mostrou a eficácia do método para o diagnóstico de falhas de cirto-circuito e barras quebradas em motores de indução trifásicos. Fang, R. and Hongzhong, M. (2006). Application of mcsa and svm to induction machine rotor fault diagnosis, Intelligent Control and Automation, WCICA - The Sixth World Congress on., Vol. 2, pp. 5543–5547. O diagnóstico de tipos diferentes de falhas em um mesmo modelo torna o método atrativo do ponto de vista operacional. Além disso o método proposto é não invasivo pois utiliza sinais de sensores normalmente presentes na planta industrial e pode ser implementado em um Sistema Especialista, possibilitando uma análise em tempo real sem o auxı́lio de um profissional especialista em manutenção, sendo esta a proposta para continuação desta pesquisa. Filho, L. P. (2008). Acompanhamento preditivo de motores de indução trifásicos através da análise de fluxo magnético, PhD thesis, Universidade Estadual de Campinas. Goldberg, D. (1989). Genetic Algorithms in Search, Optimization and Machine le, Addison Wesley. Montgomery, D. (2001). Design and analysis of experiments, London, UK: John Wiley & Sons. Neves, R. (2004). Desenvolvimento de modelos mecânico-probalı́sticos para estruturas de pavimentos de edifı́cios, PhD thesis, Universidade de São Paulo. Agradecimentos Os autores agradecem à FAPEMIG - Projeto Demanda Universal - TEC APQ-00589-11 e a CAPES. Silva, V., Fleming, P., Sugimoto, J. and Yokoyama, R. (2008). Multiobjective optimization using variable complexity modeling for control system design, Applied Soft Computing Vol.8, Issue 1: 392–401. Referências Almeida, M. T. (2010). Manutenção preditiva: Benefı́cios e lucratividade. professor da escola federal de engenharia de itajubá. consultor em monitoramento de máquinas pela mta. itajubá Ű mg. Sottile, J., Trutt, F. and J.L, K. (2000). Experimental investigation of on-line methods for incipient fault detection, Conf. Rec. IEEEIAS, Vol. 8, pp. 2682–2687. Tallam, R., Lee, S., Stone, G., Kliman, G., Yoo, J., Habetler, T. and Harley, R. (2003). A survey of methods for detection of stator related fauts in induction machines, 4th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives pp. pp. 35–46. Baccarini, L. M. R. (2005). Detecção e Diagnóstico de Falhas em Motores de Indução, PhD thesis, Faculdade de Engenharia Elétrica, UFMG. Baccarini, L., Menezes, B. and Caminhas, W. (2010). Fault induction dynamic model, suitable for computer simulation: Mechanical syst. and signal processing, pp. 300–311. Vieira Junior, H. ., Kienitz, K. H. and Belderrain, M. (2010). Multinomial selection problem: A study of bem and avc algorithms, Communications in Statistics. Simulation and Computation Description. Benbouzid, M. E. H. (2000). A review of induction motors signature analysis as a medium for faults detection, IEEE Trans. Ind. Electron, Vol. 47, pp. 984–993. Box, G. and Draper, N. (1987). Empirical model building and response surfaces, New York, John Wiley. Brito, J. (2002). Desenvolvimento de um sistema inteligente hı́brido para diagnóstico de falhas 2953
Baixar