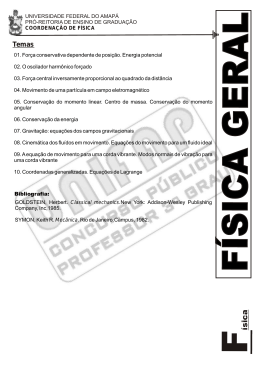
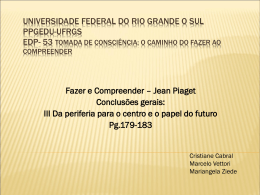
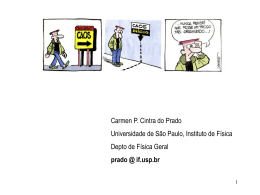
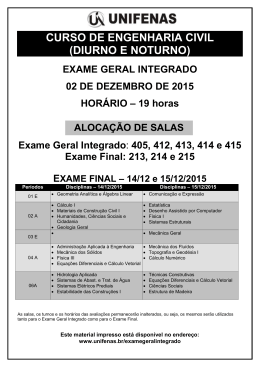
http://dx.doi.org/10.5540/DINCON.2011.001.1.0037 144 ANÁLISE PRELIMINAR DE UM NOVO ATRATOR Gustavo Henrique Oliveira Salgado1 and Luis Antonio Aguirre2 1 2 Universidade Federal de Itajubá - Campus Itabira, Itabira, Brasil, [email protected] Programa de Pós Graduação em Engenharia Elétrica, Universidade Federal de Minas Gerais, Belo Horizonte, Brasil, [email protected] Resumo: O trabalho descreve a análise de um sistema no R que produz um atrator estranho denominado “atrator corda”. Algumas das características desse atrator é a falta de simetria e o fato de ter duas variáveis a partir das quais o sistema é muito pouco observável. Apresenta-se a caracterização do único ponto f xo do sistema, discutem-se questões referentes à reconstrução do espaço de fases e são mostrados mapas de primeiro retorno a duas seções de Poincaré. Palavras-chave: Dinâmica não linear, atrator estranho, seção de Poincaré. 1. INTRODUÇÃO Diversos trabalhos em sistemas dinâmicos não-lineares iniciam com a reconstrução do espaço de fases. Nos casos em que somente uma variável é registrada, o espaço reconstruído depende de alguns fatores conhecidos, dentre eles: i) a observabilidade do sistema a partir da variável registrada, e ii) as propriedades de simetria do sistema [1]. Sistemas com simetria apresentam particularidades na reconstrução do espaço de fases e, portanto, é bastante conveniente ter sistemas de teste que não sejam simétricos e que apresentem desaf os em tal reconstrução a partir de uma variável. Um sistema com essas características é o conhecido conjunto de equações de Rössler, para o qual a reconstrução a partir da variável z é bastante mais difícil do que o é utilizando as variáveis x e y. Em artigo recente [2] o sistema ẋ = −(y + z) + a(F − x) ẏ = xy − bxz − y + G (1) ż = bxy + xz − z foi proposto para estudar questões relacionadas à observabilidade e reconstrução de sistemas dinâmicos não lineares. Assim como o sistema de Rössler o novo sistema não tem simetria, mas ao contrário do sistema de Rössler, ele têm duas variáveis a partir das quais a reconstrução é muito difícil. O objetivo desse artigo é apresentar uma análise preliminar do sistema (1) para os seguintes valores dos parâmetros a = 0,25; b = 4,03; F = 8,00 e G = 1,00. Nessa condição o sistema possui apenas um ponto f xo e um atrator estranho. Na seção 2 será visto que os pontos f xos de (1) são determinados, em geral, por interseções de hipérboles associadas às equações de ẏ e ż e a dinâmica local em torno do ponto f xo será estudada. Alguns aspectos gerais do atrator serão mencionados na Seção 3 e na Seção 4 serão fornecidos parâmetros para fazer a imersão do atrator a partir de observações da variável x. A partir dessas reconstruções, serão obtidos mapas de primeiro retorno para f uxo que permitirá melhor compreender a organização do assim chamado “atrator corda”. 2. PONTOS FIXOS E ESTABILIDADE LOCAL A partir dos pontos f xos do sitema (1) será determinado o comportamento dinâmico local em torno dos pontos f xos. Os pontos f xos são obtidos pela resolução do sistema ẋ = ẏ = ż = 0. Isolando a variável x a partir da equação ẋ = 0 obtem-se, para a 6= 0 x=F − y+z . a (2) Substituindo (2) nas equações ẏ = 0 e ż = 0 obtem-se as seguintes equações: y 2 − (b − 1)yz − bz 2 − a(F − 1)y + abF z = aG, (3) by 2 + (b + 1)yz + z 2 − abF y − a(F − 1)z = 0. (4) As equações (3) e (4) são hipérboles no plano yz para b 6= −1 e b 6= 1, respectivamente. Se b ∈ {−1, + 1} estas equações retratam uma hipébole e uma parábola. Assim, os pontos f xos do sistema (1) são determinados pelas interseções dessas curvas. A Figura 1 exibe essas interseções para os valores dos parâmetros a = 0,25, b = 4,03; F = 8,00 e G = 1,00. Nesse caso as equações (3) e (4) têm apenas um ponto em comum. Portanto, o sistema (1) possui apenas um ponto f xo. 145 3. O ATRATOR ESTRANHO Dada uma condição inicial (x0 , y0 , z0 ) é possível observar numericamente que as órbitas convergem para uma região do espaço formando o atrator estranho. A Figura 2 foi gerada a partir da condição inicial (0,0,0) e exibe como essa órbita se comporta em torno do atrator. Figura 1 – A hipérbole desenhada com tranço ponto representa a hipérbole da equação (3) enquanto que a linha contínua representa a hipérbole da equação (4). Os valores dos parâmtros escolhidos foram a = 0,25; b = 4,03; F = 8,00; G = 1,00. Isolando uma das variáveis da equação (4) e substituindo a expressão obtida na equação (3) obtem-se uma equação envolvendo uma única variável. Utilizando um algorítimo para soluções de equações algébricas e realizando substituições retroativas foram encontrados os seguintes valores numéricos aproximados para o ponto f xo 7,9060810618004233755744 X ∗ ≈ −0,0064977032489081417283 . (5) 0,0299774377988022978347 O comportamento dinâmico local em torno dos pontos f xos de um sistema de equações diferenciais pode ser estudado a partir linearização do sistema no caso do ponto f xo ser hiperbóbico1 [3, 4]. A lineariação do sistema (1) no ponto f xo X ∗ é dada por −0,2500 −1,000 −1,000 DF |X ∗ ≈ −0,1273 6,9056 −31,6225 . (6) 0,0285 31,6225 6,9056 Figura 2 – Órbita para condição inicial (0, 0, 0) com N = 105 pontos e passo de integração δt = 10−3 . O transiente não é mostrado na figura. Para entender certos aspectos desse atrator é necessário compreender como suas óbritas são organizadas. Uma maneira de realizar essa análise é utilizar seções de Poincaré e reduzir o estudo aos mapas de primeiro retorno [3, 4]. Um aspecto curioso do atrator mostrado na Figura 2 é a formação de uma “corda” na qual trechos da trajetória do sistema são espremidos em uma pequena região do espaço. Além disso, a referida “corda” é praticamente paralela à coordenada x e, portanto, ortogonal ao plano yz. Como consequência, as variáveis y e z praticamente não possuem informação sobre a “corda”. A Figura 3 ilustra que a projeção sobre o plano yz das órbitas do atrator esconde a geometria em formato de “corda” que o atrator possui em seu interior. Os autovalores de (6) são = −0,2469113497 λ2,3 = 6,9045367366 ± j31,8592215425. 20 (7) Portanto, existe uma variedade estável W s de dimensão um associada ao autovalor λ1 e uma variedade instável W u de dimensão dois associada ao par de autovalores complexos conjugados λ2 e λ3 . Contudo, o comportamento dinâmico em torno do ponto f xo determinado pelo espaço estável E s e pelo espaço instável E u não é observado em todo o espaço. Em sua estrutura dinâmica, o problema apresenta um atrator estranho. Esse atrator retrata a dinâmica global do estado estacionário do sistema. 1 Um ponto f xo é dito hiperbólico se os autovalores da linearização do sistema de Eq. diferenciais possuem parte real não nula. 10 z λ1 30 0 −10 −20 x −10 0 10 20 y Figura 3 – Projeção do atrator sobre o plano yz. Certas características do atrator não são observadas pelas variáveis y e z. A pobre observabilidade do sistema (1) a partir das variáveis y e z, comparado à variável x foi recentemente quantif cada. Coef cientes de observabilidade que requerem o conhe- 146 cimento das equações do sistema podem ser utilizadas para quantif car a facilidade de obter uma imersão a partir de uma variável [6]. Para o sistema (1) os seguintes valores foram obtidos δx = 0,0104, δy = δz = 0,0005 [2]. Essa mesma ordem de observabilidade foi conf rmada por um método que procura, indiretamente, quantif car a observabilidade somente a partir de dados [2]. Os valores dos coef cientes foram Sx = 0,35 ± 0,029, Sy = Sz = 0,04 ± 0,002 para dados sem ruído, e Sx = 0,31 ± 0,028, Sy = 0,04 ± 0,002 e Sz = 0,03±0,001 para 10% de ruído nos dados [2]. Um procedimento baseado em dados, como o mencionado, requer a imersão da série temporal. Esse assunto será brevemente mencionado na próxima seção. reconstruído utilizando (8) com τ = 15 que corresponde a uma perna de tempo t = 15 × 10−3, em que 10−3 foi o passo utilizado na integração do sistema (1). Como pode ser visto (compare com a Figura 2), a estrutura fundamental do atrator foi preservada. 4. IMERSÃO DA SÉRIE TEMPORAL Como a variável x é a que tem o maior coef ciente de observabilidade, a imersão será realizada a partir do registro de x(t) obtido por meio de integração numérica para reconstrução do atrator [5]. A Figura 4 exibe uma janela da série temporal de x(t). O objetivo é encontrar seções de Poincaré que permitam obter inforfações a organização do atrator a partir dessas reconstruções. Dois conjuntos de coordenadas serão utilizados na presente investigação: coordenadas de atraso e coordenadas diferenciais. 6 4 x(t) 2 0 −2 Apesar da reconstrução do atrator mostrada naFigura 5 apresentar as principais características originais do sistema, não se conseguiu encontrar uma seção de Poincaré conveniente para construir um mapa de primeiro retorno. Isso não é necessariamente uma falha do procedimento de imersão, mas deve-se à estrutura peculiar do atrator corda. Um novo conjunto de coordenadas de imersão foi usado para contornar essa dif culdade. 4.2. Imersão por coordenadas diferenciais −4 −6 Figura 5 – Imersão por tempo de atraso: τ = 15. 0 0.5 1 1.5 2 t Uma outra maneira de realizar a reconstrução do atrator é usar um conjunto de coordenadas diferenciais, no qual os vetores são da forma [x(t), ẋ(t), ẍ(t)]T . Como x(t) só é registrada em tempos discretos, as derivadas foram estimadas numericamente como 2.5 4 x 10 Figura 4 – Série temporal x(t). 4.1. Imersão por coordenadas de atraso Para a imersão por coordenadas de atraso da série temporal foi utilizado a aplicação de imersão [X(i), Y (i), Z(i)] = [x(i), x(i + τ ), x(i + 2τ )], (8) em que i = 1, · · · ,N ; N é o número de dados da série temporal discretizada e o parâmetro τ é o tempo de atraso associado. Para uma série temporal contínua, τ corresponde a um intervalo de tempo que determina o tempo de atraso entre as coordenadas. Foram realizadas imersões da série temporal x(i) utilizando (8) para diferentes valores de τ . Valores pequenos de τ resultam na concentração da trajetória ao longo da diagonal principal do espaço reconstruído. Por outro lado, tempos de atraso excessivamente elevados fazem com que o atrator reconstruído perca sua estrutura original, pois nesses casos as componentes dos vetores reconstruídos perdem a correlação temporal mútua [7]. A Figura 5 mostra o espaço de fases ẋ(i) ∼ ẍ(i) ∼ x(i + 1) − x(i − 1) x(i + 1) − 2x(i) + x(i − 1). (9) Assim, foi construída a seguinte aplicação de imersão por coordenadas diferenciais x(i) x(i + 1) − x(i − 1) 10 (10) −3 10 x(i + 1) − 2x(i) + x(i − 1) 102 10−6 em que os fatores de potências de 10 nas segunda e terceira coordenadas representam mudanças de escalas nos eixos ẋ(t) e ẍ(t) para melhorar a visualização na reconstrução. A reconstrução do atrator a partir da aplicação (10) está exibida nas Figuras 6 e 7. A partir da Figura 7 é possível detectar um espaço sem preenchimentos de trajetórias para valores da coordenada ẍ 147 5.6 5.5 5.4 x(k+1) 5.3 5.2 5.1 5 4.9 4.9 5 5.1 5.2 x 5.3 5.4 5.5 5.6 k Figura 9 – Mapa de Primeiro Retorno F (xk ) = xk+1 . Figura 6 – Imersão por coordenadas diferenciais. 5. CONCLUSÃO Figura 7 – Imersão por coordenadas diferenciais - Projeção sobre o plano ẋ × ẍ. O trabalho descreve alguns passos iniciais na análise de um sistema que apresenta um atrator estranho no R3 . Para o conjunto de parâmetros estudados, o sistema apresenta apenas um ponto f xo com variedade estável em R e variedade instável em R2 . Estudos de estabilidade anteriores indicam que a reconstrução a partir apenas das variáveis y ou z é muito difícil, uma vez que a “corda” f ca praticamente imperceptível. Essa observação foi conf rmada pelos estudos de imersão discutidos no presente artigo. Tomando por base as imersões estudadas, foram propostas duas seções de Poincaré para o f uxo e os correspondentes mapas de primeiro retorno. A análise do sistema em estudo, reconhecidamente, está no início. Um alvo de médio prazo é poder investigar características do sistema que resultam na formação da “corda”. AGRADECIMENTOS entre o nível da “corda” e ẍ = −3 no atrator. A partir dessa região é possível def nir seções de Poincaré convenientes para construirmos o mapa de Poincaré associado. Para construção da seção exibida na Figura 08 foi escolhido o plano ẋ = −2 com valores de ẍ ≤ −3. −4 −5 −5.5 2 Referências [1]PUB C. Letellier; L.A. Aguirre, “Investigating nonlinear dynamics from time serires: the inf uence of symmetry and the choice of observables”, CHAOS, Vol 12, pp. 549-558, 2002. [2] L.A. Aguirre and C. Letellier, “Investigating observability properties from data in nonlinear dynamics”, Physical Review E, (to appear), 2011. −4.5 −6 [3] N. Fielder-Ferrara e C.P.C. do Prado, “Caos: uma Introdução,” São Paulo: Editora Edgar Blucher, 1994. 2 d x/dt Os autores agradecem f nanciamento do CNPq. −6.5 −7 [4] L.H.A. Monteiro, “Sistemas Dinâmicos,” 2a edição, São Paulo: Editora Livraria da Física, 2006. −7.5 −8 −8.5 4.9 5 5.1 5.2 x 5.3 5.4 5.5 5.6 Figura 8 – Seção de Poincaré ẋ = −2 para ẍ ≤ −3. A partir das coordadas x da seção descrita na Figura 8 obteve-se o mapa de primeiro retorno F (xk ) = xk+1 exibido na Figura 9. Tal mapa conf rma o caráter dissipativo da dinâmica e por apresentar um máximo diferenciável aponta para o fato de que esse sistema deve apresentar uma cascata de duplicação de período como rota para o caos. [5]DOI G.B. Mindlin; R. Gilmore,“Topological analysis and synthesis of chaotic time series ,” Physica D: Nonlinear Phenomena Vol 58, No. 1-4, pp. 229-242, February 1992. [6] C. Letellier, L.A. Aguirre and Maquet, J., “Relation between observability and differential embeddings for nonlinear dynamics”, Physical Review E, Vol 71, paper 066213, 2005. [7] M.A. Savi. “Dinâmica Não-linear e Caos”. Rio de Janeiro: E-papers, 2006.
Baixar