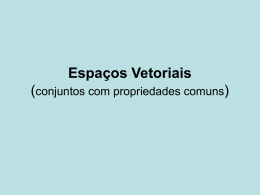
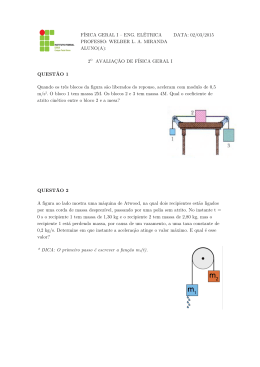
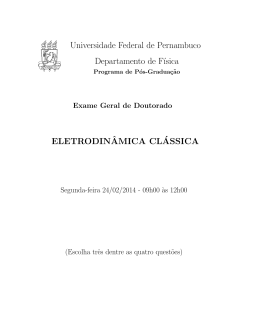
Análise Vetorial Sumário Apenas uso pessoal K. D. Machado 1 Integração Escalar e Vetorial 1.1 Conceitos Iniciais Sobre Integrais . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Integrais de Linha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2.1 Comprimento de Arco de Curvas . . . . . . . . . . . . . . . . . . . . . . I Comprimento de Arco em Coordenadas Retangulares Bidimensionais II Comprimento de Arco em Coordenadas Polares . . . . . . . . . . . . . III Comprimento de Arco em Coordenadas Retangulares Tridimensionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . IV Comprimento de Arco em Coordenadas Cilı́ndricas . . . . . . . . . . . V Comprimento de Arco em Coordenadas Esféricas . . . . . . . . . . . . 1.2.2 Campos Vetoriais Conservativos . . . . . . . . . . . . . . . . . . . . . . . I Trabalho e Energia Potencial . . . . . . . . . . . . . . . . . . . . . . . II Potencial Elétrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2.3 Campos Vetoriais Não-Conservativos . . . . . . . . . . . . . . . . . . . . I Trabalho de Forças Não-Conservativas . . . . . . . . . . . . . . . . . . II Força Eletromotriz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . III Circuitação de Campo Magnético . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 6 7 7 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 14 14 14 20 36 42 42 46 51 2 Análise Vetorial K. D. Machado Apenas uso pessoal SUMÁRIO K. D. Machado Apenas uso pessoal Capı́tulo 1 Análise Vetorial Integração Escalar e Vetorial C onforme vimos nos dois capı́tulos anteriores, várias relações fı́sicas envolvem a operação de derivação, seja na forma escalar, seja na forma vetorial, tanto na forma de derivadas simples quanto na forma de operadores diferenciais. Em geral, relações microscópicas, válidas para um dado ponto do espaço, envolvem essas operações, e talvez o exemplo mais imediato sejam as equações de Maxwell do Eletromagnetismo, escritas na forma dada pelas equações ??. Porém, em um grande número de situações fı́sicas, relações macroscópicas são igualmente necessárias, e um exemplo elementar é o que ocorre quando temos que considerar um sistema de partı́culas. Nesse caso, eventualmente é necessário considerar grandezas que representam somas ou médias de grandezas microscópicas, e, portanto, a ideia de somatória leva diretamente à operação inversa à derivação, ou seja, à integração, seja ela de grandezas escalares ou vetoriais. Consequentemente, nosso próximo assunto refere-se justamente a essa operação matemática, que veremos tanto envolvendo grandezas escalares como vetoriais, e que resultará em propriedades e operações importantes tanto em Fı́sica quanto em Matemática. Conforme fizemos quando iniciamos o estudo de derivadas, vamos recordar o ponto central relacionado às integrais. 1.1 Conceitos Iniciais Sobre Integrais O ponto inicial para o entendimento da ideia de integral consiste em tentar responder à questão: dada uma função y = f (x), onde f (x) > 0, como a mostrada na figura 1.1, qual a área abaixo da curva (que aparece destacada na figura) situada entre os pontos x = a e x = b? y y = f(x) a b x Figura 1.1: Área delimitada por uma função y = f (x) entre x = a e x = b. Uma possı́vel resposta aproximada pode ser obtida se dividirmos a área desejada em figuras geométricas 4 K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL cuja área seja conhecida e de fácil determinação. Por exemplo, considere que o intervalo [a, b] seja dividido em n intervalos iguais, na forma de retângulos, cujas bases são definidas pelos pontos xi e xi+1 , de modo que a base de cada retângulo vale ∆x = xi+1 − xi . A altura de cada retângulo é considerada como sendo dada pelo valor de y correspondente ao valor de f (x) aplicado em x = xi+12+xi , e será representado por yi , ou seja, Análise Vetorial A figura 1.2 ilustra os termos definidos acima. Note que x0 = a, xn = b e n = y y = f(x) yi a xi xi+1 b x Apenas uso pessoal xi + ∆x + xi ∆x xi+1 + xi =f = f xi + 2 2 2 yi = f (1.1) b−a ∆x . Figura 1.2: Região definida na figura 1.1 dividida em áreas mais simples, para um cálculo aproximado. Assim, a área de um dos retângulos, como o destacado na figura 1.2, é dada por ∆x ∆x (1.2) 2 Note que essa área é uma aproximação para a área abaixo da curva entre os pontos xi e xi+1 , como se percebe pela figura. A área total abaixo da curva é obtida, de forma aproximada, somando-se a área dos retângulos, ou seja, usando a equação 1.2, ∆Ai = yi ∆x = f xi + A≈ n−1 X ∆Ai = n−1 X f xi + i=0 i=0 ∆x ∆x 2 (1.3) Podemos melhorar a aproximação acima considerando um intervalo ∆x cada vez menor. Quando o intervalo tornar-se infinitamente pequeno, obteremos a área desejada. Assim, temos que considerar o limite quando ∆x tende a zero na equação 1.3, isto é, A = lim ∆x→0 n−1 X ∆x ∆x 2 f xi + i=0 (1.4) recordando que, como n = b−a ∆x , a somatória acima torna-se uma soma infinita. Essa somatória é o que definimos como sendo a integral definida entre os pontos x = a e x = b, ou seja, Z b−a ∆x −1 x=b f (x)dx = lim ∆x→0 x=a de modo que a área sob a curva é dada por A= Z X i=0 x=b x=a f xi + f (x)dx = Z a ∆x ∆x 2 (1.5) b f (x)dx (1.6) 1.1. CONCEITOS INICIAIS SOBRE INTEGRAIS K. D. Machado 5 Apenas uso pessoal Assim, a interpretação geométrica da integral de uma função y = f (x) > 0 no intervalo [a, b] é a área abaixo da curva. Se f (x) 6 0, então podemos interpretar a integral num intervalo [a, b] como fornecendo o negativo da área delimitada pelo eixo x e a curva descrita por f (x). E, finalmente, se a função f (x) por positiva em algumas regiões do intervalo [a, b] e negativa em outras, podemos dividir o intervalo de forma que nas regiões onde f (x) > 0 a integral é positiva, e corresponde a uma área positiva, e nas regiẽs onde f (x) < 0 temos uma integral negativa, o que equivale a uma área negativa, que deve ser subtraı́da da área positiva. É importante ressaltar que a interpretação geométrica acima pode ser estendida para mais variáveis. Por exemplo, considere que uma superfı́cie S no espaço tridimensional seja descrita por uma função z = f (x, y), e por hipótese z > 0. Essa superfı́cie S, quando Análise Vetorial projetada no plano xy, resulta numa região R, como mostra a figura 1.3. Considere agora que desejamos determinar o volume da região delimitada pela superfı́cie S e o plano xy. Nesse caso, podemos proceder de forma análoga à feita anteriormente, dividindo a região em figuras geométricas de volumes conhecidos. Por exemplo, podemos considerar paralelepı́pedos, de altura zij = f (xi , yj ) e base dada por ∆x e ∆y, de modo que o volume do paralelepı́pedo seja Vij = zij ∆x∆y = f (xi , yj )∆x∆y z z = f(x,y) S y R x Figura 1.3: Volume delimitado pela superfı́cie S descrita por z = f (x, y) e o plano xy. Assim, o volume da região é dado, aproximadamente, pela soma dos volumes dos paralelepı́pedos, ou seja, V ≈ XX i j Vij = XX i f (xi , yj )∆x∆y j e, quando tomamos os limites ∆x → 0 e ∆y → 0, obtemos o volume da região, o que corresponde à integral V = ZZ R f (x, y)dxdy = ZZ f (x, y)dA R Além da interpretação geométrica da integral como sendo uma área (ou volume) de uma dada região, outras grandezas também podem ser obtidas por meio de integrações. Tais grandezas podem ser escalares ou vetoriais, dependendo do tipo de integração. 6 K. D. Machado 1.2 1. INTEGRAÇÃO ESCALAR E VETORIAL Integrais de Linha d~r = dxı̂ + dy ĵ + dz k̂ Em polares, pela equação ?? temos d~r = dρ ρ̂ + ρ dθ θ̂ que fica, em cilı́ndricas, utilizando a expressão ??, d~r = dρ ρ̂ + ρ dθ θ̂ + dz k̂ ~ Por fim, em coordenadas esféricas d~r = dℓ vale, mediante ??, Apenas uso pessoal Análise Vetorial Uma integral de linha, também chamada de integral de caminho, é um tipo de integração em que é necessário definir uma curva ao longo da qual a integração é feita. Essa curva é dada por uma equação da forma ~r = ~r(u), onde u é um parâmetro, e a integral pode resultar numa grandeza escalar ou vetorial, e o integrando pode envolver funções vetoriais ou escalares. Aqui é interessante recordar a figura ??, e os resultados expressos pelas equações ??–??, que indicam que o vetor d~r é um vetor tangente à curva descrita por ~r(u). É comum indicar o vetor d~r por d~ℓ, chamado de vetor elemento de comprimento de arco. De fato, já calculamos esse vetor anteriormente nos sistemas de coordenadas que temos utilizado. Em retangulares, a equação ?? fornece d~r = dr r̂ + rdθ θ̂ + r sen θ dφ φ̂ ~ O uso de d~r ou dℓ para representar o vetor elemento de comprimento de arco é, em geral, uma questão associada ao parâmetro u do qual a curva ~r(u) é função. Quando u é o tempo, e temos então um movimento no sentido fı́sico, de modo que ~r = ~r(t), d~r representa um deslocamento infinitesimal entre dois pontos do espaço correspondentes a dois instantes de tempo diferentes, e a curva ~r(t) é uma trajetória. Quando u é algum outro parâmetro, a curva ~r = ~r(u) não depende do tempo, e nesse caso d~ℓ corresponde à diferença entre as posições de dois pontos da curva situados infinitamente próximos, mas num mesmo instante de tempo. Assim, quando ~r = ~r(u), sendo u algum parâmetro que não o tempo, a curva é um ente geométrico, que existe inteiramente num dado instante de tempo. Por outro lado, se ~r = ~r(t), a curva, que é uma trajetória, só existe se for considerado um intervalo de tempo. Num dado instante de tempo, temos apenas um dos pontos dessa trajetória. Conforme dissemos, integrais de linha são aquelas que dependem da especificação de uma curva ~r(u) para poderem ser efetuadas. Tais integrais podem ser classificadas em algumas formas gerais, que são a) Z f (~r ) dℓ b) Z f (~r ) d~ℓ Z ~ (~r ) dℓ V d) C C C c) Z ~ (~r ) · d~ℓ V C e) Z C ~ (~r ) × d~ℓ V ~ (~r ) é uma função vetorial. onde C é a curva descrita por ~r(u), dℓ = |d~ℓ |, f (~r ) é uma função escalar e V As integrais dos tipos (a) e (d) resultam em grandezas escalares, ao passo que as dos tipos (b), (c) e (e) fornecem vetores. Se a curva C for uma curva fechada, então as integrais acima podem ser escritas na forma de integrais de linha fechadas, ou seja, f) I f (~r ) dℓ C g) I C f (~r ) d~ℓ h) I C ~ (~r ) dℓ V i) I C ~ (~r ) · d~ℓ V j) I C ~ (~r ) × d~ℓ V onde a circunferência sobreposta ao sinal de integração indica que a curva C é uma curva fechada. Em ~ ao longo da curva C. Note que a circuitação particular, uma integral do tipo (i) é chamada de circuitação de V ~ resulta numa grandeza escalar. Vejamos agora alguns exemplos de aplicação dessas integrais. de V 1.2. INTEGRAIS DE LINHA 1.2.1 K. D. Machado 7 Comprimento de Arco de Curvas Figura 1.4: Curva C descrita por ~r(u) e comprimento L[P; Q] entre dois pontos P e Q da curva. Apenas uso pessoal Análise Vetorial A integral de linha mais elementar é aquela que está associada ao problema de determinar o comprimento de arco de uma dada curva C descrita por ~r(u). Considere uma dada curva C como a mostrada na figura 1.4. Suponha que queiramos determinar o comprimento L[P; Q] da curva C entre os dois pontos P e Q da figura, situados nas posições ~r1 = ~r(u1 ) e ~r2 = ~r(u2 ). Para determinar o comprimento da curva, podemos considerar os vetores d~ℓ, que são tangentes à curva ~r(u) como mostra a figura 1.5. Considerando que o módulo de cada vetor d~ℓ corresponde à distância entre dois pontos da curva C que estão infinitamente próximos, a soma dos módulos dos d~ℓ, ou seja, dos dℓ, nos fornece o comprimento da curva entre os dois pontos desejados. Matematicamente, temos L[P; Q] = Z Q P |d~ℓ| = Z Q dℓ P Figura 1.5: Vetores d~ℓ entre dois pontos P e Q de uma curva descrita por ~r(u). (1.7) e a forma explı́cita dessa integral depende do sistema de coordenadas utilizado. Vejamos alguns casos particulares importantes. I Comprimento de Arco em Coordenadas Retangulares Bidimensionais Em coordenadas retangulares, o vetor elemento de arco é dado pela equação ??, 8 K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL d~r = dxı̂ + dy ĵ + dz k̂ que, em duas dimensões, fica d~r = dxı̂ + dy ĵ (1.8) dℓ = Análise Vetorial de modo que a equação 1.7 torna-se, usando 1.9, p dx2 + dy 2 L[P; Q] = Q Z p dx2 + dy 2 P Apenas uso pessoal Assim, em duas dimensões, temos, recordando que d~r = d~ℓ, (1.9) (1.10) Considere agora que ~r = ~r(u) = x(u)ı̂ + y(u) ĵ, de modo que x = x(u) e y = y(u). Além disso, os pontos P e Q correspondem a valores u1 e u2 para o parâmetro u. Nesse caso, podemos escrever dy du du dy 2 dy 2 = du2 du dx du du dx 2 du2 dx2 = du dy = dx = Portanto, o comprimento de arco fica ou L[P; Q] = L[u1 ; u2 ] = L[u1 ; u2 ] = Z Z dx 2 u1 u2 r u1 Vejamos um exemplo de aplicação. u2 r dy 2 dy 2 du du dx 2 du du2 + + du du du2 (1.11) Exemplo 1.1. Considere uma curva C descrita por x = 2 cos u, y = 2 sen u. Determine o comprimento de arco entre u1 = 0 e u2 = π3 . Para usar a equação 1.11, vamos precisar de dx 2 dx = −2 sen u du dy = 2 cos u du = 4 sen2 u du dx 2 = 4 cos2 u du Assim, temos ou h π i Z π3 p = L 0; 4 sen2 u + 4 cos2 u du 3 0 h π i Z π3 = 2 du L 0; 3 0 1.2. INTEGRAIS DE LINHA o que resulta em K. D. Machado h πi π 2π = 2[u]03 = L 0; 3 3 9 dy = dy dx dx de modo que 1.10 fica ou L[x1 ; x2 ] = Z x2 r dx2 + x1 Z L[x1 ; x2 ] = x2 r 1+ x1 dy 2 dx dy 2 dx dx2 dx Apenas uso pessoal Análise Vetorial Quando ~r = ~r(u), o comprimento de arco dado pela equação 1.10 pode ser colocado na forma dada em 1.11. Entretanto, é comum em duas dimensões termos uma curva dada por y = y(x) ou x = x(y). Nesses casos, a equação 1.10 pode ser reescrita noutra forma. Considerando que y = y(x), e que os pontos P e Q estão associados a valores x1 e x2 , podemos escrever No caso de termos uma função do tipo x = x(y), então, seguindo a mesma ideia, teremos Z y2 s dx 2 1+ L[y1 ; y2 ] = dy dy y1 (1.12) (1.13) O uso de 1.12 ou 1.13 depende de como a função for dada. Vejamos um exemplo de aplicação. Exemplo 1.2. Considere a parábola dada por y = 3x2 − 2x + 4. Determine o comprimento de arco entre os pontos (1, 5) e (2, 12). Para obter o comprimento de arco pedido podemos usar a equação 1.12, visto que nesse caso temos y = y(x). Vamos precisar inicialmente de dy = 6x − 2 dx Então, como x1 = 1 e x2 = 2, obtemos L[1; 2] = Z 1 Vamos fazer uma mudança de variáveis, dada por 2 p 1 + (6x − 2)2 dx v = 6x − 2 dv = 6 dx v1 = 6x1 − 2 = 4 v2 = 6x2 − 2 = 10 Assim, a equação 1.2 fica L[1; 2] = Z 4 10 p dv 1 + v2 6 10 K. D. Machado L[1; 2] = 1 6 Z 10 4 p 1 + v 2 dv (1.14) Vamos resolver inicialmente a integral indefinida Z p 1 + v 2 dv Análise Vetorial e, para isso, vamos efetuar outra mudança de variáveis, dada por v = tg α 2 dv = sec α dα Utilizando essa substituição, e recordando que 1 + tg2 α = sec2 α, temos Z q Z p 1 + v 2 dv = 1 + tg2 α sec2 α dα ou Z p Z 2 1 + v dv = sec3 α dα Queremos desenvolver agora a integral do lado direito, ou seja, Z Z sec3 α dα = sec α × sec2 α dα ou Z ou ainda, A primeira integral resulta em Z 3 sec α dα = sec3 α dα = Z Z Z sec α(1 + tg2 α) dα sec α dα + Z sec α tg2 α dα sec α dα = ln | sec α + tg α| A segunda pode ser feita por partes, definindo-se Apenas uso pessoal ou 1. INTEGRAÇÃO ESCALAR E VETORIAL (1.15) (1.16) (1.17) (1.18) dh = sec2 α dα s = sec α h = tg α ds = tg α sec α dα Assim, temos Z sec α tg2 α dα = tg α sec α − Z sec3 α dα Utilizando as equações 1.18 e 1.19 em 1.17, achamos Z Z 3 sec α dα = ln | sec α + tg α| + tg α sec α − sec3 α dα (1.19) 1.2. INTEGRAIS DE LINHA K. D. Machado 2 de modo que Z Z sec3 α dα = ln | sec α + tg α| + tg α sec α sec3 α dα = 1 1 ln | sec α + tg α| + tg α sec α 2 2 Análise Vetorial Voltando então à equação 1.16, temos Z p 1 1 1 + v 2 dv = ln | sec α + tg α| + tg α sec α 2 2 (1.20) Apenas uso pessoal ou seja, 11 (1.21) Os limites de integração correspondem a ângulos α1 e α2 , de modo que, utilizando a equação 1.21 na 1.14, temos ou L[1; 2] = L[1; 2] = iα2 1 1h ln | sec α + tg α| + tg α sec α 62 α1 1 1 1 sec α2 + tg α2 ln tg α2 sec α2 − tg α1 sec α1 + 12 sec α1 + tg α1 12 12 (1.22) Agora, recordando a substituição 1.15 e que v1 = 4 e v2 = 10, podemos determinar os valores das tangentes e secantes acima, isto é, v1 = tg α1 ⇒ tg α1 = 4 q √ sec α1 = 1 + tg2 α1 = 17 v2 = tg α2 ⇒ tg α2 = 10 q √ sec α2 = 1 + tg2 α2 = 101 Utilizando os valores acima, o comprimento de arco dado por 1.22 fica √ 1 101 + 10 1 √ 1 √ L[1; 2] = ln √ + 10 101 − 4 17 12 12 12 17 + 4 ou √ √ √ 17 1 10 + 101 5 101 √ L[1; 2] = ln − + 12 6 3 4 + 17 (1.23) Vejamos agora o que ocorre ainda em duas dimensões, mas considerando agora o sistema de coordenadas polares. II Comprimento de Arco em Coordenadas Polares Em coordenadas polares o vetor elemento de comprimento de arco é dado pela equação ??, d~r = d~ℓ = dρ ρ̂ + ρ dθ θ̂ de modo que, nesse caso, o módulo do vetor elemento de comprimento de arco, ou simplesmente o comprimento de arco, é dado por p p (1.24) dℓ = d~ℓ · d~ℓ = dρ2 + ρ2 dθ2 12 K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL Com isso, a equação 1.7 torna-se, usando 1.24, L[P; Q] = Z Q P p dρ2 + ρ2 dθ2 (1.25) Em polares, é muito comum expressar curvas na forma ρ = ρ(θ), de modo que a equação acima pode ser reescrita, já que, nesse caso, Análise Vetorial Vejamos agora um exemplo de aplicação. Apenas uso pessoal dρ dθ dθ Com isso, e considerando que os pontos P e Q são dados por P(ρ(θ1 ), θ1 ) e Q(ρ(θ2 ), θ2 ), temos Z θ2 r 2 dρ L[θ1 ; θ2 ] = dθ2 + ρ2 dθ2 dθ θ1 ou Z θ2 r dρ 2 ρ2 + dθ L[θ1 ; θ2 ] = dθ θ1 dρ = (1.26) Exemplo 1.3. Uma cardióide é descrita pela equação ρ(θ) = a(1 − cos θ), onde a > 0. Determine o comprimento de arco entre os pontos θ1 = 0 e θ2 = π2 . Inicialmente, vamos precisar calcular dρ = a sen θ dθ Agora, substituı́mos essa expressão e a equação da cardióide na equação 1.26, ou seja, que fica h π i Z π2 p = L 0; a2 (1 − cos θ)2 + a2 sen2 θ dθ 2 0 h π i Z π2 p a 1 − 2 cos θ + cos2 θ + sen2 θ dθ L 0; = 2 0 Como cos2 α + sen2 α = 1, podemos obter ou Z π2 √ h πi =a L 0; 2 − 2 cos θ dθ 2 0 π h πi √ Z 2√ 1 − cos θ dθ L 0; =a 2 2 0 Para poder continuar, precisamos da seguinte relação trigonométrica cos(2α) = cos2 α − sen2 α que pode ser reescrita como cos(2α) = 1 − sen2 α − sen2 α = 1 − 2 sen2 α de modo que (1.27) 1.2. INTEGRAIS DE LINHA K. D. Machado sen2 α = 1 − cos(2α) 2 13 (1.28) Portanto, de 1.28, temos α 1 − cos α = 2 2 ou Análise Vetorial Utilizando agora a equação 1.29 em 1.27, temos π r h πi √ Z 2 θ L 0; 2 sen2 dθ =a 2 2 2 0 Z π2 h πi θ = 2a L 0; sen dθ 2 2 0 Agora, no intervalo [0, π2 ], sen 2θ é sempre positivo, de modo que ficamos com ou que fica ou III Z π2 h πi θ L 0; = 2a sen dθ 2 2 0 h h πi θ i π2 = 4a − cos L 0; 2 2 0 h πi h √2 i L 0; = −4a −1 2 2 h πi √ = 2a(2 − 2) L 0; 2 Comprimento de Arco em Coordenadas Retangulares Tridimensionais (1.29) Apenas uso pessoal sen2 (1.30) Em coordenadas retangulares, o vetor elemento de arco é dado pela equação ??, d~r = dxı̂ + dy ĵ + dz k̂ de modo que o módulo do vetor elemento de arco fica dℓ = Assim, a equação 1.7 torna-se L[P; Q] = p dx2 + dy 2 + dz 2 Z (1.31) Q P p dx2 + dy 2 + dz 2 (1.32) 14 IV K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL Comprimento de Arco em Coordenadas Cilı́ndricas Considerando agora coordenadas cilı́ndricas, o vetor elemento de arco é dado pela expressão ??, d~r = dρ ρ̂ + ρ dθ θ̂ + dz k̂ dℓ = V Análise Vetorial e a equação 1.7 fica p dρ2 + ρ2 dθ2 + dz 2 Z L[P; Q] = Q P p dρ2 + ρ2 dθ2 + dz 2 Comprimento de Arco em Coordenadas Esféricas Por fim, em coordenadas esféricas temos, por??, d~r = dr r̂ + rdθ θ̂ + r sen θ dφ φ̂ O módulo correspondente é dℓ = p dr2 + r2 dθ2 + r2 sen2 θdφ2 Apenas uso pessoal Portanto, o elemento de arco fica (1.33) (1.34) (1.35) O comprimento de arco de uma curva escrita em coordenadas esféricas fica, então, considerando a equação 1.7, L[P; Q] = Q Z P p dr2 + r2 dθ2 + r2 sen2 θdφ2 Vejamos agora algumas outras aplicações. 1.2.2 Campos Vetoriais Conservativos (1.36) Existe uma classe especial de campos vetoriais V~ que se distingue por ter algumas propriedades bastante relevantes, e que os diferencia dos demais. Tais propriedades são 1. Campos vetoriais conservativos são irrotacionais, ou seja, sendo V~ conservativo, temos ∇ × V~ = 0 (1.37) 2. Existe uma função escalar f associada a um campos vetoriais conservativo V~ tal que V~ = ∇f (1.38) 3. Sendo V~ um campo conservativo, a integral do produto V~ · d~ℓ ao longo de uma dada curva C, entre dois pontos P e Q, independe da curva C considerada, ou seja, Z C V~ · d~ℓ independe de C (1.39) 1.2. INTEGRAIS DE LINHA K. D. Machado 15 4. A circuitação de V~ ao longo de qualquer caminho fechado C é nula, se V~ for conservativo, isto é, I V~ · d~ℓ = 0 , ∀C C (1.40) Análise Vetorial ∇ × ∇f = 0 Apenas uso pessoal É interessante ressaltar que, se V~ satisfizer uma das propriedades acima, automaticamente ele satisfaz as outras três. Por exemplo, suponha que V~ satisfaça o item 1 acima, ou seja, ∇ × V~ = 0, de modo que V~ é irrotacional. Nesse caso, recordando a propriedade ??, a qual é válida para funções f escalares, vemos que, como ∇f é um vetor (o vetor gradiente de f ), podemos escrever V~ = ∇f , que é o que diz o item 2. Continuando, podemos agora calcular a integral de V~ · d~ℓ ao longo de uma curva C, de um ponto P até um ponto Q, ou seja, Z V~ · d~ℓ (1.41) IC = C Em geral, IC , dada pela equação 1.41, depende da curva C especı́fica utilizada para o cálculo. Porém, como V~ = ∇f , temos que calcular Z Z ~ ~ ∇f · d~ℓ (1.42) V · dℓ = IC = C C Relembrando agora a equação ??, df = ∇f · d~r vemos que a integral do lado direito em 1.42 pode ser reescrita como Z Z ~ ~ df V · dℓ = IC = C C ou, integrando, IC = Z C Q V~ · d~ℓ = f P = f (Q) − f (P) (1.43) Note que, pela equação 1.43, a integral IC depende apenas da função escalar f aplicada nos pontos inicial (P) e final (Q) em que a integral é feita, e não depende do caminho C feito entre estes pontos. Consequentemente, a integral IC tem o mesmo valor, para qualquer curva C considerada, e independe de C, validando o item 3. Podemos verificar imediatamente o item 4 já que, nesse caso, temos que calcular a circuitação de V~ , ou seja, I I I P df = f P = 0 ∇f · d~ℓ = V~ · d~ℓ = C C C Assim, supondo o item 1 válido, os outros três acabam sendo consequências dele. Partindo agora da hipótese que o item 2 seja verificado, ou seja, que V~ = ∇f (equação 1.38) temos, pela propriedade ??, que ∇ × V~ = ∇ × ∇f = 0 e V~ é irrotacional, o que indica que o item 1 é verificado. A demonstração dos itens 3 e 4 é imediata e fica como exercı́cio para o leitor. Consideremos agora que o campo vetorial V~ satisfaça o item 3, ou seja, a integral de V~ · d~ℓ ao longo de C entre dois pontos P e Q independe de C. A integral é uma função escalar do ponto inicial e do ponto 16 K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL final apenas. Para continuarmos, vamos supor que as coordenadas utilizadas sejam as retangulares, apenas para simplificação das operações envolvidas, o que não altera o resultado final. Nesse caso, podemos escrever, quando necessário, V~ (x, y, z) = Vx ı̂ + Vy ĵ + Vz k̂ d~ℓ = dxı̂ + dy ĵ + dz k̂ (1.44) f (x, y, z; x1 , y1 , z1 ) = Z (x,y,z) V~ · d~ℓ (x1 ,y1 ,z1 ) Apenas uso pessoal Análise Vetorial Além disso, como a integral é função dos pontos inicial e final, vamos considerar um ponto inicial fixo P(x1 , y1 , z1 ) e um ponto final qualquer Q(x, y, z), de modo que o valor da integral será representado por (1.45) Note que, como a propriedade dada pelo item 3 é válida, V~ é conservativo e a integral independe do caminho utilizado para ir do ponto inicial ao final. Considere agora que, ao invés de fazermos a integral até o ponto Q(x, y, z), consideremos o ponto R(x + ∆x, y, z). Nesse caso, teremos f (x + ∆x, y, z; x1 , y1 , z1 ) = Z (x+∆x,y,z) V~ · d~ℓ (x1 ,y1 ,z1 ) (1.46) Agora, vamos calcular a diferença entre as duas integrais, ou seja, subtraindo a equação 1.45 da 1.46, f (x + ∆x, y, z; x1 , y1 , z1 ) − f (x, y, z; x1 , y1 , z1 ) = (x+∆x,y,z) Z (x1 ,y1 ,z1 ) V~ · d~ℓ − Z (x,y,z) V~ · d~ℓ (x1 ,y1 ,z1 ) Quando invertemos os limites de integração numa integral, ela troca de sinal. Efetuando essa alteração na última integral, temos f (x + ∆x, y, z; x1 , y1 , z1 ) − f (x, y, z; x1 , y1 , z1 ) = Z (x+∆x,y,z) (x1 ,y1 ,z1 ) V~ · d~ℓ + Z (x1 ,y1 ,z1 ) V~ · d~ℓ (x,y,z) Note que podemos reunir as duas integrais numa só, já que o integrando é o mesmo, e o caminho de integração também. Portanto, f (x + ∆x, y, z; x1 , y1 , z1 ) − f (x, y, z; x1 , y1 , z1 ) = Z (x+∆x,y,z) (x,y,z) V~ · d~ℓ (1.47) O lado direito da equação acima corresponde a uma integração feita de um ponto inicial (x, y, z) até um ponto final (x + ∆x, y, z), de modo que os dois pontos tem coordenadas y e z iguais. Isso não significa que, ao longo de um caminho C arbitrário, y e z permanecem necessariamente constantes. Significa apenas que o caminho C arbitrário é tal que os pontos inicial e final tem mesmas coordenadas y e z. Fazendo uso agora das equações 1.44, temos V~ · d~ℓ = Vx dx + Vy dy + Vz dz (1.48) Note que, para um caminho C arbitrário, dx, dy e dz são arbitrários, e não-nulos em geral. Porém, devemos recordar que a integral que aparece em 1.47 é independente do caminho utilizado. Nesse caso, podemos escolher um caminho que simplifique a integração, e o caminho mais simples é aquele em que y e z permanecem constantes entre os dois pontos (x, y, z) e (x + ∆x, y, z). Nesse caminho particular, temos dy = 0 e dz = 0, de modo que 1.48 fica, nesse caminho, 1.2. INTEGRAIS DE LINHA 17 K. D. Machado V~ · d~ℓ = Vx dx (1.49) Assim, a equacao 1.47 torna-se Z (x+∆x,y,z) Vx dx (x,y,z) Agora, vamos dividir essa equação por ∆x, ou seja, Análise Vetorial f (x + ∆x, y, z; x1 , y1 , z1 ) − f (x, y, z; x1 , y1 , z1 ) 1 = ∆x ∆x Z (x+∆x,y,z) Vx dx (x,y,z) e vamos tomar o limite quando ∆x tende a zero, isto é, lim ∆x→0 Apenas uso pessoal f (x + ∆x, y, z; x1 , y1 , z1 ) − f (x, y, z; x1 , y1 , z1 ) = f (x + ∆x, y, z; x1 , y1 , z1 ) − f (x, y, z; x1 , y1 , z1 ) = ∆x 1 ∆x→0 ∆x lim Z (x+∆x,y,z) Vx dx (x,y,z) O lado esquerdo da equação acima corresponde à definição de derivada parcial da função f (x, y, z) em relação a x, enquanto o lado direito resulta simplesmente em Vx , ou seja, ∂f = Vx ∂x (1.50) Assim, conseguimos uma relação entre a função f (x, y, z) e uma das componentes do vetor V~ . Note que, para isso, consideramos um ponto Q(x, y, z), um segundo ponto R(x + ∆x, y, z) e um ponto arbitrário P(x1 , y1 , z1 ) para escrever as integrais nas equações 1.45 e 1.46. Seguindo a mesma ideia, ao considerar um ponto S(x, y + ∆y, z), além de P e Q, vamos obter ∂f = Vy ∂y e, tendo em conta um ponto T(x, y, z + ∆z), acharemos ∂f = Vz ∂z de modo que o vetor V~ , dado pela equação 1.44, pode ser escrito como ∂f ∂f ∂f ĵ + k̂ ı̂ + V~ (x, y, z) = Vx ı̂ + Vy ĵ + Vz k̂ = ∂x ∂y ∂z ou V~ (x, y, z) = ∇f (1.51) (1.52) de modo que o item 2 acaba de ser satisfeito. Os itens 1 e 4 são consequência imediata dos dois anteriores. Vejamos agora alguns exemplos de aplicação. Exemplo 1.4. Verifique se o campo vetorial V~ = (2y cos z − 3y 2 )ı̂ + (2x cos z − 6xy) ĵ + (4 cos z − 2xy sen z) k̂ é conservativo. Se for, obtenha a função f tal que V~ = ∇f . (1.53) 18 K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL O modo mais simples e direto de verificar se um dado campo vetorial é conservativo consiste em utilizar a propriedade dada no item 1, ou seja, vamos calcular o rotacional de V~ . Temos então, Análise Vetorial ou seja, ∇ × V~ = (−2x sen z + 2x sen z)ı̂ ĵ ∂ ∂y 2x cos z − 6xy k̂ ∂ ∂z 4 cos z − 2xy sen z Apenas uso pessoal ı̂ ∂ ∇ × V~ = ∂x 2y cos z − 3y 2 + (−2y sen z + 2y sen z) ĵ + (2 cos z − 6y − 2 cos z + 6y) k̂ = 0 de modo que V~ é irrotacional e conservativo. Portanto, podemos escrever V~ mediante V~ = ∇f . Assim, temos que ∇f = V~ ou, usando a expressão ?? para o gradiente de f em coordenadas retangulares, e a também a equação 1.53, achamos ı̂ ∂f ∂f ∂f + ĵ + k̂ = ∂x ∂y ∂z (2y cos z − 3y 2 )ı̂ + (2x cos z − 6xy) ĵ + (4 cos z − 2xy sen z) k̂ o que indica que ∂f = 2y cos z − 3y 2 ∂x ∂f = 2x cos z − 6xy ∂y ∂f = 4 cos z − 2xy sen z ∂z (1.54a) (1.54b) (1.54c) Portanto, a função f (x, y, z) é tal que ela deve satisfazer simultaneamente as três equações diferenciais dadas em 1.54. Vamos agora considerar uma delas, que pode ser qualquer uma das três. Por exemplo, vamos empregar a equação 1.54b, ∂f = 2x cos z − 6xy ∂y e vamos reescrever essa equação como ∂f = (2x cos z − 6xy) ∂y e vamos agora integrar essa equação diferencial, tendo em conta que, como é uma integração parcial em uma das variáveis, as outras são supostas constantes para a integração, ou seja, Z Z ∂f = (2x cos z − 6xy) ∂y o que resulta em 1.2. INTEGRAIS DE LINHA K. D. Machado f (x, y, z) = 2xy cos z − 3xy 2 + g(x, z) 19 (1.55) onde a função g(x, z) surge porque a integração é feita na variável y, de modo que é preciso incluir uma função constante com relação a y, mas que pode depender, em geral, das outras variáveis. Com isso, achamos a função f , mas ficamos com uma nova questão, que é determinar a função g(x, z), o que pode ser feito se considerarmos outra das equações 1.54. Por exemplo, vamos utilizar agora a equação 1.54a, isto é, 2y cos z − 3y 2 + ∂g = 2y cos z − 3y 2 ∂x de modo que Apenas uso pessoal Análise Vetorial ∂f = 2y cos z − 3y 2 ∂x Note que, como sabemos quanto vale f , que é dada pela equação 1.55, podemos calcular a derivada no lado esquerdo dessa equação, ou seja, ∂g =0 ∂x de modo que a função g(x, z) é, na verdade, independente de x, e pode ser escrita como g(x, z) = h(z). Retornando em 1.55, temos f (x, y, z) = 2xy cos z − 3xy 2 + h(z) (1.56) Resta agora achar o valor de h(z), o que implica em utilizar a última equação do sistema 1.54, ou seja, a equação 1.54c, ∂f = 4 cos z − 2xy sen z ∂z Fazendo uso de 1.56, obtemos ou −2xy sen z + dh = 4 cos z − 2xy sen z dz dh = 4 cos z dz que pode ser reescrita como dh = 4 cos z dz e, integrando, ou Z dh = Z 4 cos z dz h = 4 sen z + c onde c é uma constante numérica, já que a integral é indefinida. Retornando em 1.56, ficamos com f (x, y, z) = 2xy cos z − 3xy 2 + 4 sen z + c (1.57) que é a função escalar f associada a V~ por meio de ∇f = V~ . Note que ela fica completamente definida a menos de uma constante numérica, que não depende das variáveis x, y ou z. Vejamos agora algumas aplicações importantes associadas a campos vetoriais conservativos. 20 I K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL Trabalho e Energia Potencial W= Z ~ r2 F~ · d~rC ~ r1 Apenas uso pessoal Análise Vetorial Intimimamente ligado à questão de campos vetoriais conservativos está a determinação do trabalho realizado por uma força. Conforme adiantamos na seção ??, o trabalho realizado sobre uma partı́cula por uma força que desloca essa partı́cula de uma posição ~r1 até uma posição ~r2 ao longo de uma curva ~rC é dado pela equação ??, ou seja, (1.58) Naquele momento não sabı́amos ainda como efetuar tal integração, mas agora já temos ferramentas para isso. podemos então considerar um exemplo de aplicação, para fundamentar melhor o assunto. Exemplo 1.5. Considerando que uma força dada por F~ = (2xy + z 3 )ı̂ + x2 ĵ + 3xz 2 k̂ (1.59) aja sobre uma partı́cula de massa m, determine o trabalho realizado pela força para levar a partı́cula do ponto A(1, −2, 1) ao ponto B(3, 1, 4) ao longo da trajetória descrita pela equação 3t2 h 5t i k̂ − 2 ĵ + (t + 1)2 − 8 2 onde t é tempo, e as unidades utilizadas são do SI. ~r(t) = (t + 1)ı̂ + (1.60) Inicialmente vamos determinar a que instantes de tempo correspondem os pontos A e B. Considerando que o valor das coordenadas ao longo da trajetória são dados por x=t+1 y= 3t2 −2 8 z = (t + 1)2 − 5t 2 (1.61) temos que, para o ponto A(1, −2, 1), devemos ter t = 0 s, enquanto que, para o ponto B(3, 1, 4), devemos ter t = 2 s. Em seguida, vamos precisar calcular o vetor d~r ao longo da trajetória, que fica ou d~r = t dtı̂ + d~r = h 3t 5i dt ĵ + 2(t + 1) − dt k̂ 4 2 h 5i 3t k̂ dt tı̂ + ĵ + 2(t + 1) − 4 2 (1.62) Na sequência, o próximo passo é substituir as expressões para x, y e z dadas em 1.61 na força dada pela equação 1.59, para que possamos efetuar o produto escalar F~ · d~r e obter o trabalho realizado. Para realizar esses cálculos, vamos utilizar o Maple, introduzindo o comando LineInt, que calcular a integral de linha de V~ · d~r ao longo de uma dada curva ou trajetória. O comando é LineInt(V, curva, opç~ oes) onde V é o campo vetorial V~ a ser integrado, curva corresponde à curva de integração, e opç~ oes são opções que podem ser utilizadas na execução da integral de linha dada. O parâmetro curva pode ser 1. Uma circunferência, dada por 1.2. INTEGRAIS DE LINHA K. D. Machado 21 Circle(centro, raio) onde centro são as coordenadas do centro da circunferência, no formato <x,y,z>, e raio é o raio da circunferência. Line(p1, p2) Apenas uso pessoal 2. Um segmento de reta, dado por Análise Vetorial onde p1 e p2 são as coordenadas dos pontos inicial e final do segmento de reta, no formato <x,y,z>. 3. Segmentos de reta indo de um ponto p1 até p2, de p2 até p3, e assim sucessivamente. Nesse caso o comando é LineSegments(p1, p2, ..., pn) 4. Uma curva propriamente dita, dada por uma equação de curva da forma ~r(u), sendo u um parâmetro. Nesse caso temos Path(r, faixa) onde r é a equação vetorial da curva ou trajetória, ou seja, ~r(u), e faixa indica os valores inicial e final para o parâmetro u, na forma u=u1..u2, onde u1 é o valor inicial e u2 é o valor final de u. Quase todas as opç~ oes possı́veis estão associadas a recursos gráficos, visto que o comando LineInt permite também visualizar o campo vetorial V~ , o caminho de integração e os vetores tangentes ao caminho de integração. Em opç~ oes temos output: define como será a saı́da do comando. Pode ser value (que é o padrão), apresentando o valor da integral, plot, apresentando graficamente o campo vetorial V~ , a curva de integração e vetores tangentes a ela, e integral, apresentando a integral de V~ · d~r, mas sem resolvê-la. Se value ou integral forem utilizados, os outros comandos gráficos são ignorados. fieldoptions: Lista de opções associadas ao campo vetorial V~ , como cor, tamanho das setas, etc. Usa-se na forma fieldoptions = [opç~ ao1, opç~ ao2, ...]. pathoptions: Similar ao anterior, definindo parâmetros para a curva de integração. Usa-se na forma pathoptions = [opç~ ao1, opç~ ao2, ...]. vectoroptions: Similar aos dois anteriores, define opções para os vetores tangentes à curva ~r(u). Usa-se na forma vectoroptions = [opç~ ao1, opç~ ao2, ...]. title: Define um tı́tulo para o gráfico. A sintaxe é title = "nome . view: Já definido anteriormente (ver pág. ??). Note que o comando LineInt faz parte tanto da biblioteca VectorCalculus quanto da Student[VectorCalculus]. A diferença é que só na segunda é que ele tem saı́das gráficas. Fazendo agora uso do comando LineInt, vamos inicialmente visualizar o campo vetorial dado pela força F~ , a curva e um vetor tangente a ela. Iniciamos chamando a biblioteca apropriada e definindo a força F~ , ou seja, > > with(Student[VectorCalculus]): F:=VectorField(<2*x*y+z**3,x**2,3*x*z**2>); 22 K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL F := (2 x y + z 3 ) êx + x2 êy + 3 x z 2 êz Em seguida, definimos a curva dada em 1.60, rc:=<t+1,(3*t**3/8) - 2, (t+1)**2 - 5*t/2>; 3 rc := (t + 1) êx + ( 38t − 2) êy + ((t + 1)2 − 5t 2 ) êz Agora, usamos o comando LineInt, LineInt(F,Path(rc,t=0..2), output=plot, axes=boxed, vectoroptions=[color=red], fieldoptions=[arrows=THIN, orientation=[268,67], color=black]); Análise Vetorial > > > Apenas uso pessoal > e o resultado é apresentado na figura 1.6. Note que t vai de t = 0 a t = 2 na curva ~r. Agora, podemos montar a integral necessária ao cálculo, mediante um comando similar, só que a opção output será outra, isto é, > > > Figura 1.6: Campo vetorial dado pela força F~ definida em 1.59 e trajetória descrita pela expressão 1.60. LineInt(F,Path(rc,t=0..2),output=integral,axes=boxed, vectoroptions=[color=red],fieldoptions=[arrows=`3-D`, orientation=[246,67],color=black]); o que resulta em Z 2 1 8 Z 5t 9 (t + 1)2 t2 3 t3 − 2) + ((t + 1)2 − )3 + 8 2 8 0 5 t 1 +3 (t + 1) ((t + 1)2 − )2 (2 t − )dt 2 2 ou, efetuando uma simplificação, usando o comando simplify, > 2 (t + 1) ( simplify(%); 2 0 105 t4 + 4 t + 44 t3 − 36 + 56 t6 − 24 t5 + 24 t2 dt Podemos agora calcular a integral, mediante, > LineInt(F,Path(rc,t=0..2),output=value); 1.2. INTEGRAIS DE LINHA K. D. Machado 23 202 o que indica que o trabalho realizado vale 202 J. W~r→~rref = ~ rref Z F~ · d~r ~ r Apenas uso pessoal Análise Vetorial Considere agora um sistema simples formado por duas partı́culas, uma das quais pode mover-se sob a força produzida pela outra. Eventualmente forças externas podem agir sobre essas partı́culas, mas tais forças, por hipótese, não realizam trabalho durante o movimento da partı́cula, de modo que o sistema está isolado. A força interna ao sistema é, também por hipótese, uma força conservativa. Assim, ao passar de um dado ponto para outro, a força interna conservativa realiza trabalho, com a caracterı́stica de que esse trabalho independe do modo pelo qual a partı́cula passou de um ponto ao outro. Vamos definir, nesse sistema, uma dada posição ~rref chamada de posição de referência. O trabalho realizado para a partı́cula passar de um ponto qualquer ~r para o ponto de referência é (1.63) Esse trabalho depende apenas dos pontos inicial ~r e final ~rref da partı́cula, e não de como ela passa de um ponto ao outro, por causa da hipótese de que a força é conservativa. A esse trabalho damos o nome de energia potencial U do sistema, de modo que U(~r; ~rref ) = W~r→~rref = Z ~ rref F~ · d~r ~ r (1.64) Assim, a energia potencial do sistema é uma função escalar bem definida, que depende da posição do ponto considerado (~r ) e do ponto tomado como referência (~rref ). Note que a energia potencial está associada à força conservativa F~ , de modo que só é possı́vel definir energias potenciais para forças conservativas. Se a força for não-conservativa, ou dissipativa, então o trabalho realizado entre ~r e ~rref depende de como se vai de um ponto a outro, e essa função perde a utilidade e o significado, pois existem infinitas trajetórias entre os dois pontos. Suponha agora que a partı́cula móvel de nosso sistema passe de uma posição ~r1 para uma posição ~r2 . Neste caso, o trabalho realizado durante esse deslocamento independe do trajeto seguido por ela, pois a força é conservativa. Esse trabalho é W~r1 →~r2 = ~ r2 Z F~ · d~r ~ r1 (1.65) Como o trabalho acima independe do caminho realizado pela partı́cula, podemos considerar que o caminho descrito por ela é tal que ela sai de ~r1 , vai até a posição de referência ~rref e em seguida dirige-se para a posição ~r2 . No trajeto de ~r1 a ~rref , o trabalho realizado vale W~r1 →~rref = ~ rref Z F~ · d~r ~ r1 o que corresponde, pela equação 1.64, a W~r1 →~rref = U(~r1 ; ~rref ) = U1 (1.66) (1.67) O trabalho realizado para ir de ~rref a ~r2 é dado por W~rref →~r2 = Z ~ r2 F~ · d~r (1.68) ~ rref Note que o trabalho total realizado para ir de ~r1 a ~r2 é dado pela soma das equações 1.66 e 1.68, ou seja, 24 K. D. Machado W~r1 →~r2 = Z ~ r2 F~ · d~r = Z ~ rref F~ · d~r + ~ r2 F~ · d~r ~ rref ~ r1 ~ r1 Z 1. INTEGRAÇÃO ESCALAR E VETORIAL W~r1 →~r2 = U1 (~r1 ; ~rref ) − Análise Vetorial Da equação 1.64 temos W~r2 →~rref = Z ~ rref Z ~ rref F~ · d~r ~ r2 F~ · d~r = U(~r2 ; ~rref ) = U2 ~ r2 de modo que a equação 1.69 pode ser escrita como ou W~r1 →~r2 = U1 (~r1 ; ~rref ) − U2 (~r2 ; ~rref ) W~r1 →~r2 = −(U2 − U1 ) ou ainda, W~r1 →~r2 = −∆U Apenas uso pessoal Utilizando a equação 1.67 e também trocando a ordem em que a integração é feita no segundo termo do lado direito, temos (1.69) (1.70) (1.71) o que indica que, se conhecermos a energia potencial associada a um dado sistema, podemos determinar o trabalho realizado pela força interna conservativa associada a essa energia potencial durante um dado movimento por meio do negativo da variação da energia potencial do sistema nesse movimento. Isso indica que, quando a força interna produz um trabalho positivo, a energia potencial do sistema diminui, ao passo que, quando o trabalho realizado é negativo, a energia potencial aumenta. Considere agora que os pontos ~r1 e ~r2 estejam muito próximos, de modo que ~r2 = ~r1 + d~r. Nesse caso, o trabalho realizado para ir de um ponto ao outro é um trabalho infinitesimal, dado por d̄W = F~ · d~r (1.72) Note o uso de um traço para representar a forma diferencial d̄W. Isso ocorre porque o trabalho é uma grandeza que só tem sentido quando associada a um processo que envolve um deslocamento, ainda que infinitesimal. Não podemos associar o trabalho a um dado ponto no espaço, e sim a um processo no qual a partı́cula passa de um ponto a outro. Esse tipo de diferencial é chamado de diferencial inexata, e outro exemplo corresponde ao fluxo de calor que passa de um objeto a outro durante algum processo termodinâmico. O calor está associado a um processo de transferência de energia entre dois corpos e, se essa transferência for infinitesimal, teremos uma diferencial inexata d̄Q. No caso da energia potencial, por outro lado, temos uma grandeza que é bem definida para uma dada posição ~r, como mostra a equação 1.64. Assim, para dois pontos ~r1 e ~r1 + d~r, a diferença de energia potencial entre eles é dada por dU e, utilizando a equação 1.71, achamos d̄W = −dU (1.73) ou, fazendo uso de 1.72, F~ · d~r = −dU (1.74) dU = ∇U · d~r (1.75) Note que as relações 1.73 e 1.74 valem para quando a força F~ interna é conservativa e tem uma energia potencial U associada definida pela expressão 1.64. Agora, da equação ??, temos 1.2. INTEGRAIS DE LINHA K. D. Machado 25 Reunindo as equações 1.74 e 1.75, achamos F~ · d~r = −∇U · d~r ou Como d~r é arbitrário, temos F~ = −∇U Apenas uso pessoal (F~ + ∇U) · d~r = 0 Análise Vetorial que é a equação ??, que já haviamos apresentado, sem demonstração, na seção ??. Portanto, a uma dada força conservativa existe uma energia potencial associada de tal modo que a força corresponde ao gradiente negativo da energia potencial correspondente. Esta relação é bastante importante, pois fornece um modo de obter a energia potencial a partir da expressão conhecida para a força. Além disso, recordando a propriedade ??, ∇ × ∇f = 0 válida para uma função escalar f , vemos que uma força F~ é conservativa se for irrotacional, pois ∇ × F~ = ∇ × (−∇U) = −∇ × ∇U = 0 Reforçando, fisicamente uma força é conservativa quando o trabalho efetuado sobre uma partı́cula para ir da posição ~r1 até ~r2 independe da trajetória executada pela partı́cula. Matematicamente, forças conservativas são irrotacionais. Vejamos alguns exemplos. Exemplo 1.6. Considere novamente o exemplo 1.5. Verifique se a força F~ é conservativa e, se for, calcule o trabalho realizado por ela para ir de A(1, −2, 1) até B(3, 1, 4) por um método diferente do usado naquele exemplo. A força é dada pela equação 1.59, F~ = (2xy + z 3 )ı̂ + x2 ĵ + 3xz 2 k̂ Vamos utilizar o Maple para verificar se ela é conservativa, calculando seu rotacional, ou seja, > > > with(Student[VectorCalculus]): F:=VectorField(<2*x*y+z**3,x**2,3*x*z**2>); F := (2 x y + z 3 ) êx + x2 êy + 3 x z 2 êz Del &x F; 0 êx e, de fato, a força é conservativa. Agora, podemos utilizar a relação F~ = −∇U, ou seja, ∂U ∂U ∂U ı̂ + ĵ + k̂ = −(2xy + z 3 )ı̂ − x2 ĵ − 3xz 2 k̂ ∂x ∂y ∂z o que resulta nas equações ∂U = −2xy − z 3 ∂x ∂U = −x2 ∂y ∂U = −3xz 2 ∂z 26 1. INTEGRAÇÃO ESCALAR E VETORIAL K. D. Machado Resolvendo iterativamente essas equações diferenciais, obtemos a função U. Vamos deixar esse procedimento como exercı́cio para o leitor, pois vamos ilustrar outro comando do Maple, chamado ScalarPotential, cuja função é justamente achar uma função f tal que, sendo dado um campo vetorial V~ , tem-se ∇f = V~ . O comando é Apenas uso pessoal ScalarPotential(V) > Análise Vetorial onde V é um campo vetorial V~ conservativo. O resultado do comando será uma função escalar f tal que ∇f = V~ . Se V não for conservativo, um aviso de erro é apresentado. Cabe ressaltar aqui que, para o nosso caso, queremos uma função tal que ∇U = −F~ , de modo que precisamos trocar o sinal do resultado fornecido pelo comando ScalarPotential para que corresponde a nossa definição de energia potencial. Outra questão importante é que a função obtida é a correta a menos de uma constante aditiva, que torna-se irrelevante se apenas diferenças de energia forem relevantes, como é o caso em geral. Passando para o nosso caso especı́fico, temos U:=-ScalarPotential(F); U := −x2 y − z 3 x Portanto, a função energia potencial associada à força dada pela equação 1.59 é dada por U = −x2 y − xz 3 + c (1.76) Note que incluı́mos uma constante aditiva, por completeza. Podemos verificar essa solução calculando o gradiente de U, já que ∇U = −F~ , > -Gradient(U); (2 x y + z 3 ) êx + x2 êy + 3 x z 2 êz que corresponde à força original. Agora, pela equação 1.71, vemos que o trabalho realizado para ir de A a B é dado por ou seja, WA→B = −∆U = −[U(B) − U(A)] = U(A) − U(B) WA→B = U(1, −2, 1) − U(3, 1, 4) Usando o Maple, temos > W:= subs(x=1,y=-2,z=1,U) - subs(x=3,y=1,z=4,U); W := 202 indicando que o trabalho vale 202 J. Note que obtivemos o mesmo resultado calculado no exemplo 1.5, como deveria ser. Considere agora que desejamos determinar a energia potencial associada a uma dada força. Podemos utilizar diretamente a definição 1.64, U(~r; ~rref ) = W~r→~rref ou ainda, partir da equação 1.74, dU = −F~ · d~r 1.2. INTEGRAIS DE LINHA K. D. Machado 27 para obter a energia potencial desejada. Note que a posição de referência é arbitrária, bem como o valor da energia potencial associada a essa referência. Vejamos alguns exemplos bastante relevantes. ~ = −mg k̂ F Apenas uso pessoal Exemplo 1.7. No exemplo ?? apresentamos a força gravitacional exercida pela Terra sobre um objeto de massa m situado em suas proximidades pode ser escrita como sendo dada por ??, Análise Vetorial e verificamos que ela é conservativa. Ache agora a energia potencial associada, e verifique se a expressão ?? dada naquele exemplo, U = mgz + k corresponde à expressão correta para U. ~ conservativa, deve ocorrer F ~ = −∇U, ou, explicitamente, Sendo F ou seja, h ∂U ∂U ∂U i −mg k̂ = − ı̂ + ĵ + k̂ ∂x ∂y ∂z ∂U =0 ∂x ∂U =0 ∂y ∂U = mg ∂z Essas equações nos dizem que U = U(x, y, z) é uma função tal que sua derivada com relação a x é nula, bem como sua derivada com relação a y, ou seja, U é constante com relação a essas duas coordenadas. Da última equação, tiramos ∂U = mg ∂z de modo que, por meio de uma integração direta, temos U = mgz + k que é a equação ??, já vista anteriormente. Note que k é uma constante, que pode ser determinada se utilizarmos uma posição de referência e um valor de referência para a energia potencial nessa posição. Por exemplo, é comum utilizar como posição de referência o nı́vel do solo, em zref = 0, considerando arbitrariamente que U(z = 0) = U(~rref ) = 0. Nesse caso, aplicando a equação ?? nesse ponto temos U(z = 0) = k = 0 de modo que achamos U = mgz , (~rref = 0, U(~rref ) = 0) (1.77) 28 K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL Exemplo 1.8. No exemplo ?? vimos que a força gravitacional produzida por uma partı́cula de massa m1 sobre uma partı́cula de massa m2 situada a uma distância r de m1 é conservativa e é dada por ??, Apenas uso pessoal ~ = − Gm1 m2 r̂ F r2 onde G é a constante de gravitação universal e r̂ é um versor orientado de m1 para m2 . Obtenha a energia potencial associada. Análise Vetorial Para obter a energia potencial associada, precisamos do gradiente em coordenadas esféricas, dado pela equação ??, ∇f = r̂ ∂f θ̂ ∂f φ̂ ∂f + + ∂r r ∂θ r sen θ ∂φ Assim, comparando temos ou − h ∂U θ̂ ∂U φ̂ ∂U i Gm1 m2 r̂ = − r̂ + + 2 r ∂r r ∂θ r sen θ ∂φ Gm1 m2 ∂U = ∂r r2 ∂U =0 ∂θ ∂U =0 ∂φ Dessas expressões vemos que U(r, θ, φ) na verdade não depende de θ ou φ, de modo que U = U(r). Temos, então, dU Gm1 m2 = dr r2 ou, mediante uma integração direta, Z r dU = rref Z r rref Gm1 m2 dr r2 onde rref refere-se à posição de referência. Assim, achamos que fica U(r) − U(rref ) = − U(r) − U(rref ) = − Gm1 m2 r r rref Gm1 m2 Gm1 m2 + r rref ou U(r) = − Gm1 m2 Gm1 m2 + U(rref ) + r rref Note que os dois últimos termos da expressão acima são constantes, de modo que a energia potencial gravitacional acima corresponde à equação ?? obtida no exemplo ??. Usualmente define-se como posição de referência um ponto onde a massa m2 esteja situada muito longe da massa m1 , isto é, onde ocorre rref → ∞. Nesse ponto considera-se que a energia potencial do sistema se anula, ou seja, U(rref ) = U(r → ∞) → 0. Utilizando essa referência, a energia potencial gravitacional pode ser escrita mediante 1.2. INTEGRAIS DE LINHA K. D. Machado U(r) = − Gm1 m2 , r (rref → ∞, U(rref ) → 0) 29 (1.78) 1 qQ r̂ 4πε0 r2 Determine a energia potencial elétrica U associada a essa força. Análise Vetorial F~Q→q = Apenas uso pessoal Exemplo 1.9. Considere a força eletrostática produzida por uma carga pontual Q sobre uma carga q também pontual, estando ambas situadas no vácuo, dada, no SI, pela expressão ??, Vamos ilustrar a obtenção da energia potencial elétrica utilizando dois modos diferentes. O primeiro emprega a equação 1.74, dU = −F~ · d~r e, para isso, vamos precisar do vetor d~r em coordenadas esféricas, dado por ??, d~r = dr r̂ + rdθ θ̂ + r sen θ dφ φ̂ Utilizando d~r dado acima, a força dada em ?? e integrando a equação 1.74 de uma posição de referência até uma posição qualquer, temos Z ~ r ~ rref dU = − Z ~ r ~ rref 1 qQ r̂ · (dr r̂ + rdθ θ̂ + r sen θ dφ φ̂) 4πε0 r2 que fica, efetuando algumas simplificações, ~r U ~ rref qQ =− 4πε0 Z ~ r ~ rref dr r2 Note que a integral passa a ser na variável r, que corresponde à distância entre a origem e o ponto considerado, sendo também o módulo do vetor ~r. Portanto, ficamos com Z r qQ dr U (~r ) − U (~rref ) = − 4πε0 rref r2 ou e então, U (~r ) − Uref = qQ h 1 ir 4πε0 r rref qQ h 1 1 i (1.79) − 4πε0 r rref Note que o primeiro e o último termo do lado direito da equação acima são constantes, de modo que poderı́amos escrever U (~r ) = Uref + 1 qQ +k (1.80) 4πε0 r sendo k uma constante. Da mesma forma como acontece no caso gravitacional, no caso elétrico é comum considerar que, quando as cargas estão muito afastadas uma da outra, ou seja, quando r = |~r | → ∞, a energia potencial elétrica do sistema se anula, de modo que Uref = U (r → ∞) = 0. Com essa consideração, a equação 1.79 torna-se U (~r ) = 30 K. D. Machado U (~r ) = 1 qQ , 4πε0 r 1. INTEGRAÇÃO ESCALAR E VETORIAL (rref → ∞, U (rref ) → 0) (1.81) Um resultado relevante obtido dessa equação é que podemos obter o trabalho realizado pela força elétrica quando o vetor W~ r1 →~ r2 = −∆U ou que fica ou Análise Vetorial Portanto, o trabalho fica W~ r2 ) − U (~ r1 )] = U (~ r1 ) − U (~ r2 ) r1 →~ r2 = −[U (~ W~ r1 →~ r2 = Uref + 1 i qQ h 1 − − 4πε0 r1 rref W~ r1 →~ r2 = 1 i qQ h 1 − Uref + 4πε0 r2 rref 1 i qQ h 1 − 4πε0 r1 r2 W~ r1 →~ r2 = − 1 i qQ h 1 − 4πε0 r2 r1 Apenas uso pessoal posição-relativa entre as duas cargas varia de ~ r1 a ~ r2 , já que, pela equação 1.71, (1.82) Note que, quando r2 > r1 , o termo entre colchetes na equação 1.82 é negativo, e torna-se positivo quando r2 < r1 . Assim, quando temos duas cargas de mesmo sinal, quando elas se afastam, ou seja, r2 > r1 , a força elétrica entre elas, que é repulsiva, produz um trabalho positivo. Vamos supor que o sistema formado pelas duas cargas esteja isolado, e que as cargas esteja inicialmente fixas em dois pontos do espaço, de modo que elas tem velocidade nula. Liberando uma das cargas, como a força entre elas é repulsiva, a carga que pode se mover começará a se afastar da outra, aumentando progressivamente de velocidade. O trabalho realizado pela força elétrica, que é interna ao sistema, é positivo, e a energia cinética da carga que se move aumenta. Uma pergunta relevante é de onde vem essa energia cinética? A resposta é que inicialmente o sistema tinha energia potencial elétrica armazenada, que diminui do mesmo valor que o trabalho realizado pela força elétrica, e é essa a interpretação fı́sica que pode ser dada à equação 1.71. Podemos repetir o argumento para cargas de sinais diferentes, verificando que, como nesse caso a força elétrica é atrativa, o trabalho realizado é positivo quando as cargas se aproximam, de modo que a energia potencial elétrica diminui quando as cargas de sinais opostos se aproximam. Outro ponto importante, que deve ser notado, é que o trabalho realizado independe do ponto e do valor de energia potencial considerados como referência, visto que ocorre uma subtração entre esses valores para os dois pontos, inicial e final, considerados. Apenas diferenças na energia potencial tornam-se relevantes. Exemplo 1.10. A força elástica produzida por uma mola ou elástico sobre um objeto pode ser modelada, de forma aproximada, pela equação ??, ~F = −K (x − x0 )ı̂ A força elástica produzida pela mola, dada por ??, é uma força conservativa, e possui uma energia potencial elástica associada. Obtenha essa energia potencial. 1.2. INTEGRAIS DE LINHA K. D. Machado 31 Apenas uso pessoal Inicialmente vamos verificar explicitamente que a força elástica ?? é conservativa, calculando seu rotacional, por meio de ı̂ ĵ ĵ ∂ ∂ ∂ = 0 ∇ × ~F = ∂x ∂y ∂z −K (x − x0 ) 0 0 Análise Vetorial De fato, a força é conservativa. Agora, calculamos a energia potencial por meio de 1.74, dU = −F~ · d~r considerando que, nesse caso, d~r = dxı̂. Integrando essa equação, temos Z ~ r ~ rref dU = − Z ~ r −K (x − x0 )ı̂ · dxı̂ ~ rref ou, efetuando algumas simplificações, e tendo em conta que, nos limites de integração podemos escrever ~r = xı̂ e ~rref = xref ı̂, temos ou x Ux ref =K Z xref U(x) − U(xref ) = K ou ainda, efetuando uma pequena manipulação, que fica ou x U(x) = U(xref ) + U(x) = U(xref ) + U(x) = U(xref ) + (x − x0 ) dx x2 2 − xx0 x xref K 2 (x − 2xx0 )xxref 2 K K 2 (x − 2xx0 ) − (x2ref − 2xref x0 ) 2 2 K 2 K (x − 2xx0 + x20 − x20 ) − (x2ref − 2xref x0 + x20 − x20 ) 2 2 que pode então ser escrita como U(x) = U(xref ) + K Kx20 K Kx20 (x − x0 )2 − − (xref − x0 )2 + 2 2 2 2 ou U(x) = U(xref ) + K K (x − x0 )2 − (xref − x0 )2 2 2 (1.83) que é a energia potencial elástica associada ao sistema formado pela mola e pelo objeto ligado na sua extremidade livre. Note que o primeiro termo e o último do lado direito acima são constantes, de modo que podemos escrever U(x) = K (x − x0 )2 + k 2 (1.84) 32 K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL onde k é uma constante aditiva. É comum estabelecer que, quando a mola não está deformada, a energia potencial elástica é nula, ou seja, quando xref = x0 , tem-se U(xref ) = U(x0 ) = 0. Nesse caso, a expressão 1.83 torna-se K (x − x0 )2 2 ou, definindo X = x − x0 como sendo a elongação da mola, temos (1.85) Análise Vetorial U(X) = KX 2 2 Apenas uso pessoal U(x) = (1.86) Podemos generalizar a equação 1.86 para quando a mola move-se paralela à direção definida pelo versor r̂, ou seja, uma direção qualquer no espaço. Nesse caso, temos U(R) = KR2 2 (1.87) onde R representa o quando a mola foi deformada a partir de seu tamanho original r0 , ou seja, R = r − r0 . A força elástica fica, então, ~ F = −K (r − r0 ) r̂ onde usamos coordenadas esféricas. (1.88) Considerando ainda relações ligadas a forças conservativas, trabalho e energia potencial, podemos obter uma expressão bastante relevante e útil para o tratamento de problemas fı́sicos envolvendo essas grandezas. Considere que F~ seja a força resultante agindo sobre uma dada partı́cula de massa m constante, vista num referencial inercial. Essa força é, por hipótese, uma força conservativa. O sistema fı́sico em questão é um sistema fechado, e a partı́cula de massa m pertence ao sistema, e é o único constituinte que se move. Assim, para a partı́cula podemos escrever a segunda lei de Newton na forma ??, onde ~a = 2 d ~ r dt2 . F~ = m~a , (massa constante, referencial inercial) Portanto, podemos escrever 2 d ~r F~ = m 2 dt Agora, vamos calcular o produto escalar F~ · ~v , onde ~v é a velocidade da partı́cula. Temos, então, d~r d2~r d~r =m · 2 F~ · ~v = F~ · dt dt dt Na sequência, considere a derivada temporal de v 2 , ou seja, ou d 2 d~r d d~r d d~r 2 =2 · (v ) = dt dt dt dt dt dt d~r d2~r d 2 (v ) = 2 · 2 dt dt dt de modo que a equação 1.89 pode ser reescrita como (1.89) 1.2. INTEGRAIS DE LINHA K. D. Machado d~r m d 2 F~ · = (v ) dt 2 dt Vamos multiplicar essa equação por dt, isto é, 33 (1.90) e, realizando algumas simplificações, Apenas uso pessoal m d(v 2 ) d~r dt = dt F~ · dt 2 dt Análise Vetorial m F~ · d~r = d(v 2 ) (1.91) 2 Recordamos agora o fato de que a força é conservativa, de modo que, utilizando a relação ??, ou seja, F~ = −∇U, temos −∇U · d~r = m d(v 2 ) 2 e, utilizando a equação ??, df = ∇f · d~r ficamos com m d(v 2 ) (1.92) 2 Vamos agora integrar a equação 1.92 considerando que a partı́cula estava numa posição inicial ~r1 , com velocidade ~v1 num instante de tempo t1 , e passou a uma posição final ~r2 , com velocidade ~v2 , no instante t2 , isto é, ou −dU = − Z 2 dU = 1 −U21 = m 2 Z 2 d(v 2 ) 1 m 2 2 (v )1 2 ou ainda, −U(2) + U(1) = mv12 mv22 − 2 2 Rearranjando os termos, temos mv22 mv12 + U1 = + U2 2 2 Os termos que envolvem velocidade na expressão acima podem ser identificados com a energia cinética da partı́cula, conforme a equação ??, de modo que K1 + U1 = K2 + U2 (1.93) ou seja, quando F~ é uma força conservativa interna a um dado sistema, temos que a soma da energia cinética do sistema com a energia potencial do sistema é uma grandeza constante, e vale a energia mecânica do sistema, dada por E=K+U A equação 1.93 pode ser escrita, nesse caso, como 34 K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL E1 = E2 (1.94) Essa equação estabelece a conservação de energia mecânica para um sistema mecânico sujeito a forças conservativas. Vejamos um exemplo simples de aplicação dessa equação. 1. Distância de separação de equilı́brio entre as cargas. Apenas uso pessoal Análise Vetorial Exemplo 1.11. Suponha que duas cargas pontuais, de valores Q1 e Q2 , de mesmo sinal, estejam conectadas por uma mola de constante elástica K. A carga Q1 está fixada numa certa posição, mas a carga Q2 pode se mover sujeita à força elétrica e elástica. O sistema está isolado, está situado no vácuo e é observado num referencial inercial. Desprezando a força gravitacional entre as cargas, determine 2. Num certo instante de tempo, a mola rompe-se, e a carga Q2 passa a se mover afastando-se de Q1 . Determine o módulo de sua velocidade quando a distância de Q1 é o dobro da separação de equilı́brio original. Vamos iniciar a resolução determinando a separação de equilı́brio, o que pode ser obtida levando em conta que, nesse caso, devemos ter, sobre a carga Q2 , F~ + ~F = 0, onde F~ é dada por ??, F~ = 1 Q1 Q2 r̂ 4πε0 r2 e ~F é dada por ??, ~F = −K (x − x0 )ı̂ Considerando que as cargas estejam sobre o eixo x, com Q1 situada na origem, temos F~ + ~F = 1 Q1 Q2 ı̂ − K (d − x0 )ı̂ = 0 4πε0 d2 lembrando que a carga Q2 está localizada em x = d, a posição de equilı́brio. Efetuando o produto escalar com ı̂, temos ou 1 Q1 Q2 − K (d − x0 ) = 0 4πε0 d2 1 Q1 Q2 = K (d − x0 ) 4πε0 d2 (1.95) Esta equação é exata, e gera uma equação cúbica para d, que irá necessitar de várias manipulações algébricas para ser desenvolvida. Com o uso do Maple isso torna-se relativamente fácil mas, para obtermos uma expressão matemática mais facilmente tratável sem utilizar o Maple, vamos fazer a hipótese de que o comprimento x0 da mola quando ela não está distendida seja muito menor que o valor de d, ou seja, d ≫ x0 . Nesse caso, fazendo x0 → 0 na equação 1.95, ficamos com 1 Q1 Q2 ≃ Kd 4πε0 d2 ou 1 Q1 Q2 ≃ d3 4πε0 K de modo que 1.2. INTEGRAIS DE LINHA K. D. Machado d≃ r 3 1 Q1 Q2 4πε0 K 35 (1.96) E1 = E2 Apenas uso pessoal Agora, queremos saber a velocidade da carga Q2 quando a distância entre ela e a carga Q1 vale r2 = 2d. Como as forças consideradas são conservativas, podemos utilizar a equação 1.94, para a energia mecânica total do sistema, Análise Vetorial lembrando que, no instante inicial, temos duas energias potenciais a considerar, a elétrica, dada por 1.81, e a elástica, definida por 1.85, ou seja, E1 = U (d) + U(d) = 1 Q1 Q2 Kd2 + 4πε0 d 2 (1.97) No instante final, a mola já não contribui mais, mas ainda temos energia potencial elétrica, e agora a carga Q2 tem uma velocidade ~v2 , de modo que E2 = U (2d) + K = mv22 1 Q1 Q2 + 4πε0 2d 2 Igualando as equações 1.97 e 1.98, temos ou de modo que ou Kd2 1 Q1 Q2 mv22 1 Q1 Q2 + = + 4πε0 d 2 4πε0 2d 2 mv22 1 Q1 Q2 Kd2 1 Q1 Q2 + Kd3 = + = 2 4πε0 2d 2 2d 4πε0 v22 = v2 = 2 1 Q1 Q2 + Kd3 m 2d 4πε0 r 21 1 Q1 Q2 + Kd3 md 4πε0 Substituindo o valor de d dado em 1.96 apenas no termo entre parênteses, temos r 1 Q1 Q2 12 1 Q1 Q2 +K v2 = md 4πε0 4πε0 K ou r 1 Q1 Q2 v2 = md 2πε0 ou r Q1 Q2 − 1 d 2 v2 = 2πε0 m e, utilizando o valor de d, v2 = r − 1 Q1 Q2 1 Q1 Q2 31 2 2πε0 m 4πε0 K (1.98) 36 K. D. Machado v2 = s ou ainda, Q1 Q2 4πε0 K 31 2πε0 m Q1 Q2 v2 = s v2 = r Análise Vetorial ou, finalmente, 1 2 2K 3 Q1 Q2 3 m 4πε0 2 m s 3 √ Q1 Q2 K 4πε0 Apenas uso pessoal ou 1. INTEGRAÇÃO ESCALAR E VETORIAL Após estudarmos alguns problemas envolvendo forças, trabalho e energia, vamos partir para a análise de sistemas fı́sicos envolvendo campos eletromagnéticos. II Potencial Elétrico Outra aplicação relevante envolvendo campos conservativos envolve os campos eletrostáticos e a determinação dos potenciais elétricos correspondentes. Nesse caso, devemos lembrar que há uma relação entre um campo eletrostático, que é conservativo, e o potencial eletrostático correspondente, dada por ?? E~ = −∇V Efetuando o produto escalar dessa equação com um elemento de arco d~r, temos ∇V · d~r = −E~ · d~r e, recordando ??, temos df = ∇f · d~r dV = −E~ · d~r (1.99) Esta equação estabelece a diferença de potencial elétrico infinitesimal que existe entre dois pontos do espaço cujas posições resultam numa posição relativa d~r também infinitesimal. A partir dessa expressão, podemos obter a diferença de potencial entre dois pontos quaisquer do espaço, mediante uma integração de linha ao longo de algum trajeto arbitrário de integração, ou seja, Z ~ r2 ~ r1 ou dV = − Z ~ r2 E~ · d~r ~ r1 V (~r2 ) − V (~r1 ) = − Z ~ r2 E~ · d~r (1.100) ~ r1 O lado esquerdo dessa expressão corresponde à diferença entre os potenciais dos pontos definidos pelas posições ~r2 e ~r1 . É também chamada simplesmente de diferença de potencial, ou ddp. Para se obter uma expressão geral para o potencial elétrico num ponto qualquer situando na posição ~r, é usual definir uma 1.2. INTEGRAIS DE LINHA K. D. Machado 37 posição arbitrária de referência ~rref , e um valor arbitrário para o potencial elétrico nesse ponto, Vref = V (~rref ), de modo que ficamos com ou V (~r ) = Vref − Z ~ r Z E~ · d~r ~ rref ~ r E~ · d~r ~ rref Apenas uso pessoal V (~r ) − V (~rref ) = − (1.101) Análise Vetorial Note que o trajeto de integração utilizado para a determinação de potenciais elétricos e diferenças de potencial elétrico é irrelevante, já que o campo eletrostático é conservativo. Uma consequência importante desse fato é que, se o trajeto for fechado, teremos, partindo de 1.99, I I E~ · d~r (1.102) dV = − C C O lado esquerdo resulta num valor nulo, ou seja, I dV = 0 C e pode ser escrito também de uma forma mais usual, mediante X ∆Vi = 0 i malha (1.103) (1.104) ou seja, numa malha, que é um trajeto fechado definido num circuito elétrico, a soma das diferenças de potencial elétrico ao longo de toda a malha resulta num valor nulo. As equações 1.103 e 1.104 são formas matemáticas diferentes para a lei das malhas, ou segunda lei de Kirchhoff. Considerando agora o lado direito de 1.102, temos I E~ · d~r = 0 (1.105) C que vale quando E~ é conservativo. Vejamos agora alguns exemplos interessantes. Exemplo 1.12. No exemplo ?? vimos que o campo elétrico produzido por um fio retilı́neo muito longo e fino imerso em vácuo e contendo cargas distribuı́das de forma homogênea ao longo de seu comprimento é dado por ??, E~ = λ ρ̂ 2πε0 ρ onde λ é a densidade linear de cargas no fio. Determine o potencial elétrico correspondente, e compare com a expressão ??. Para determinar o potencial elétrico, utilizamos a equação 1.101, V (~r ) = Vref − Z ~ r E~ · d~r ~ rref lembrando que d~r em coordenadas cilı́ndricas é dado por ??, d~r = dρ ρ̂ + ρ dθ θ̂ + dz k̂ Assim, temos 38 K. D. Machado ou Z ~ r ~ rref λ ρ̂ · (dρ ρ̂ + ρ dθ θ̂ + dz k̂) 2πε0 ρ V (~r ) = Vref − Z ~ r ~ rref λ dρ 2πε0 ρ Apenas uso pessoal V (~r ) = Vref − 1. INTEGRAÇÃO ESCALAR E VETORIAL ou Análise Vetorial Dada a simetria do campo elétrico, que não depende das coordenadas θ e z, vemos que a caracterização do ponto de referência é dada pela coordenada ρref do mesmo. Da mesma forma, o ponto genérico do espaço onde queremos o potencial pode ser caracterizado por sua coordenada ρ, de modo que ficamos com Z ρ dρ λ V (~r ) = Vref − 2πε0 ρref ρ V (~r ) = Vref − λ ln ρ|ρρref 2πε0 V (~r ) = Vref − ρ λ ln 2πε0 ρref ou ainda, que corresponde ao valor dado pela equação ??. Exemplo 1.13. No exemplo ?? vimos que o campo eletrostático produzido por uma esfera de raio R contendo uma carga pontual Q em repouso no vácuo é dado por ?? Q r̂ , 4πε0 r2 E~ = r>R para a região externa à esfera, isto é, para r > R, onde r é a distância de um ponto qualquer do espaço ao centro da esfera. Lá verificamos que esse campo é conservativo. Determine o potencial elétrico associado. Vamos utilizar o Maple para resolver esse exercı́cio. Note que aqui precisamos definir o sistema de coordenadas esféricas. Assim, iniciamos com > > with(VectorCalculus): assume(r>= 0, 0<= theta, theta<=Pi,0<=phi,phi< 2*Pi); AddCoordinates(esfericas[r,theta,phi],[r*sin(theta)*cos(phi), r*sin(theta)*sin(phi),r*cos(theta)]); > esfericas SetCoordinates(esfericas[r,theta,phi]); > > esfericas r ˜, θ˜, φ˜ Em seguida, definimos o campo elétrico dado por ??, > E:=VectorField(<Q/(4*Pi*epsilon_0*r**2),0,0>); E := Q er 4 π epsilon 0 r ˜2 Podemos agora utilizar o comando ScalarPotential do Maple. Para o nosso caso, fazemos 1.2. INTEGRAIS DE LINHA > K. D. Machado 39 simplify(ScalarPotential(E)); − Q 4 r ˜ π ǫ0 V (~r ) = Q , 4πε0 r r>R Apenas uso pessoal Note que ScalarPotential(V) fornece f tal que ∇f = V~ . Como E~ = −∇V , o potencial elétrico é o negativo do resultado acima, ou seja, Análise Vetorial Esse é o potencial elétrico gerado pela esfera (compare com a expressão ??), a menos de uma eventual constante aditiva, conforme discutimos no exemplo ??. Exemplo 1.14. Uma esfera de raio R contém cargas distribuı́das em seu interior de forma que a densidade volumétrica de carga correspondente vale ̺(r) = kr , r6R (1.106) onde k é uma constante e r é a distância de um ponto da esfera ao seu centro. O campo elétrico gerado por essa esfera é dado por ( 2 kr r6R 0 (1.107) E~ (~r ) = 4ε kR4 r>R 4ε0 r 2 onde r é a distância de um ponto qualquer do espaço até o centro da esfera. Determine o potencial elétrico correspondente nas duas regiões. Para determinar o potencial elétrico, vamos utilizar o Maple, e vamos começar pela região externa à esfera. Iniciamos com as definições necessárias para o sistema de coordenadas, isto é, > with(VectorCalculus): assume(r>= 0, 0<= theta, theta<=Pi,0<=phi,phi< 2*Pi); > > AddCoordinates(esfericas[r,theta,phi],[r*sin(theta)*cos(phi),r*sin(th eta)*sin(phi),r*cos(theta)]); > > esfericas SetCoordinates(esfericas[r,theta,phi]); esfericas r ˜, θ˜, φ˜ Em seguida, definimos o campo elétrico fora da esfera, mediante > E_f:=VectorField(<k*R**4/(4*epsilon_0*r**2),0,0>); E f := k R4 êr 4 epsilon 0 r ˜2 Vamos verificar se é conservativo, por meio de > Curl(E_f); 0 êr Agora, determinamos o potencial escalar correspondente, ou seja, > V_f:=simplify(-ScalarPotential(E_f)); 40 K. D. Machado V f := 1. INTEGRAÇÃO ESCALAR E VETORIAL k R4 4 r ˜ epsilon 0 Note o sinal negativo em ScalarPotential. Esse é o potencial escalar a menos de uma constante aditiva, então para generalizar, vamos somar uma constante c ao potencial, isto é, V_f:=V_f + c; V f := k R4 +c 4 r ˜ epsilon 0 Análise Vetorial o que resulta em V (~r ) = kR4 + c, 4ε0 r r>R Apenas uso pessoal > (1.108) Podemos agora determinar a constante c considerando uma posição de referência e um valor correspondente para o potencial elétrico nessa posição. Usualmente considera-se como referência um ponto muito afastado da esfera, com r → ∞, onde V (r → ∞) → 0. Assim, vamos introduzir o comando limit(f, x = a, dir) onde f é uma expressão algébrica, x é o nome de uma variável, a é o ponto onde queremos o limite e dir, que é opcional, é a direção em que queremos o limite, que pode ser left (pela esquerda), right (pela direita), real (plano real) ou complex (plano complexo). A forma inerte do comando é Limit(f, x = a, dir) e apresente o limite, sem calculá-lo. Utilizando o Maple, ficamos com > limit(V_f, r=infinity); c Como queremos que V (r → ∞) → 0, fazemos > c_0:=solve(%,c); c 0 := 0 onde c0 é o valor de c que resolve a equação. Substituindo de volta na expressão para V , temos > V_f:=subs(c=c_0,V_f); V f := k R4 4 r ˜ epsilon 0 de modo que 1.109 torna-se V (~r ) = kR4 , 4ε0 r r>R Vamos agora definir o campo elétrico no interior da esfera, ou seja, > E_d:=VectorField(<k*r^2/(4*epsilon_0),0,0>); E d := Vamos verificar se é conservativo, mediante > Curl(E_d); k r ˜2 êr 4 epsilon 0 (1.109) 1.2. INTEGRAIS DE LINHA K. D. Machado 41 0 êr Agora, podemos determinar o potencial dentro da esfera, usando ScalarPotential, V_d:=simplify(-ScalarPotential(E_d)); V d := − r ˜3 k 12 epsilon 0 Apenas uso pessoal > Para obter uma expressão geral, vamos somar uma constante c2 a este potencial, ou seja, V_d:=V_d + c2; Análise Vetorial > V d := − r ˜3 k + c2 12 epsilon 0 Agora, para poder determinar essa constante, devemos igualar os potenciais obtidos para dentro e para fora da esfera no ponto comum a ambos, ou seja, na superfı́cie da esfera, em r = R. Calculando o valor do potencial em r = R utilizando a expressão acima, temos > V_dR:=limit(V_d,r=R); V dR := − R3 k + c2 12 epsilon 0 Em seguida, calculamos o potencial na superfı́cie da esfera utilizando a expressão para o potencial na região r > R, o que fornece > V_fR:=limit(V_f,r=R); V fR := R3 k 4 epsilon 0 Tendo os valores de Vd e Vf em r = R, igualamos um ao outro, e resolvemos para achar c2 , ou seja, > c2_0:=solve(V_dR=V_fR,c2); c2 0 := R3 k 3 epsilon 0 Agora substituimos o valor de c20 em c2 , na equação para Vd , e ficamos com > V_d:=simplify(subs(c2=c2_0,V_d)); ou seja, V d := Vd (~r ) = k (−r ˜3 + 4 R3 ) 12 epsilon 0 k(4R3 − r3 ) , 12ε0 r6R (1.110) que fornece o potencial elétrico num ponto situado numa posição ~r qualquer, dentro da esfera. Vejamos agora alguns problemas envolvendo campos vetoriais não-conservativos. 42 1.2.3 K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL Campos Vetoriais Não-Conservativos Trabalho de Forças Não-Conservativas Apenas uso pessoal I Análise Vetorial Na seção 1.2.2 estudamos várias aplicações e propriedades associadas a campos vetoriais conservativos. Quando V~ é conservativo, algumas propriedades matemáticas relevantes podem ser utilizadas, e quando os campos vetoriais considerados tem interpretação fı́sica, várias grandezas podem ser determinadas de forma relativamente simples, como é o caso do trabalho, energiais potenciais e potenciais elétricos. Porém, uma grande classe de campos vetoriais de grande importância fı́sica é não-conservativa, de modo que nesse caso as ferramentas da seção 1.2.2 não podem ser utilizadas. Nesse caso, a determinação das integrais de linha que surgem pode ser mais complicada, posto que elas devem ser efetivamente calculadas considerando o trajeto especı́fico de integração. É importante notar que isso não diminui a importância das grandezas fı́sicas que estão associadas a esses campos não-conservativos. Vejamos alguns exemplos de aplicação. Quando as forças são não-conservativas, não podemos associar a elas uma energia potencial, de modo que o cálculo do trabalho realizado por uma força F~ deve ser feito mediante uma integração direta. Vejamos alguns exemplos desse procedimento. Exemplo 1.15. Uma partı́cula é transportada do ponto A(0, 0, 0) até o ponto B(1, 1, 1) por uma força F~ dada por F~ = 2xı̂ − 4x2 ĵ + 3yz k̂ (1.111) Determine o trabalho realizado pela força F~ para levar a partı́cula de A a B ao longo das curvas abaixo. Todas as unidades são do SI. 1. Reta dada por ~r = tı̂ + t ĵ + t k̂. 2. Curva dada por y = x2 , z = x3 , de x = 0 a x = 1. 3. Segmentos de reta de (0, 0, 0) a (1, 0, 0), depois a (1, 1, 0) até chegar em (1, 1, 1). Inicialmente vamos verificar se a força considerada é conservativa ou não. Podemos verificar explicitamente esse fato, calculando o rotacional de F~ . Utilizando o Maple para isso, ficamos com > with(Student[VectorCalculus]): > F:=VectorField(<2*x,-4*x**2,3*y*z>); F := 2 x êx − 4 x2 êy + 3 y z êz o que define a função vetorial e, calculando o rotacional, temos > Del &x F; 3 z êx − 8 x êz ou seja, obtivemos que ∇ × F~ = 3zı̂ − 8x k̂ o que mostra que a força possui um rotacional não-nulo, indicando que ela é não-conservativa. Agora, partimos para o cálculo dos trabalhos pedidos. Vamos iniciar o problema considerando a reta ~r = tı̂+t ĵ+t k̂, de modo que temos x = t, y = t e z = t, na forma paramétrica. Façamos agora a substituição desses valores na força dada em 1.111, de modo que temos F~ = 2tı̂ − 4t2 ĵ + 3t2 k̂ (1.112) 1.2. INTEGRAIS DE LINHA K. D. Machado 43 Além disso, recordando que um deslocamento infinitesimal é dado pela equação ??, d~r = dxı̂ + dy ĵ + dz k̂ temos, para a reta considerada, (1.113) ou Análise Vetorial Efetuando o produto escalar entre as equações 1.112 e 1.113 obtemos F~ · d~r = (2tı̂ − 4t2 ĵ + 3t2 k̂) · (dtı̂ + dt ĵ + dt k̂) F~ · d~r = (2t − 4t2 + 3t2 )dt = (2t − t2 ) dt Apenas uso pessoal d~r = dtı̂ + dt ĵ + dt k̂ (1.114) Utilizando agora essa expressão para o cálculo do trabalho, dado pela equação 1.58, temos W= Z ~ r2 ~ r1 (2t − t2 ) dt Note que as posições ~r1 e ~r2 correspondem aos pontos A(0, 0, 0) e B(1, 1, 1), de modo que, em função de t, temos t = 0, para A, e t = 1, para B. Portanto, ficamos com W= Z 0 1 1 2 t3 1 =1− = J (2t − t2 ) dt = t2 − 3 0 3 3 (1.115) Para a segunda curva, que é dada por y = x2 , z = x3 , de x = 0 a x = 1, temos dz = 3x2 dx dy = 2x dx de modo que d~r, ao longo dessa curva, fica d~r = dxı̂ + 2x dx ĵ + 3x2 dx k̂ enquanto a força dada em 1.111 torna-se e o produto escalar de F~ e d~r fica ou F~ = 2xı̂ − 4x2 ĵ + 3x5 k̂ F~ · d~r = (2xı̂ − 4x2 ĵ + 3x5 k̂) · (dxı̂ + 2x dx ĵ + 3x2 dx k̂) F~ · d~r = (2x − 8x3 + 9x7 ) dx Usando agora a equação 1.58 para calcular o trabalho realizado, temos W= Z ~ r2 ~ r1 (2x − 8x3 + 9x7 ) dx ou, como devemos ir de x = 0 a x = 1, obtemos W= Z 0 1 1 9 9x8 1 =1−2+ = J (2x − 8x3 + 9x7 ) dx = x2 − 2x4 + 8 0 8 8 (1.116) 44 1. INTEGRAÇÃO ESCALAR E VETORIAL K. D. Machado Por fim, vamos utilizar o caminho dado pelos segmentos de reta de (0, 0, 0) a (1, 0, 0), depois a (1, 1, 0) até chegar em (1, 1, 1). No primeiro segmento, tanto y quanto z são constantes, de modo que dy = 0 e dz = 0. Nesse caso, temos d~r = dxı̂, e a força 1.111 fica F~ = 2xı̂ − 4x2 ĵ Assim, o produto escalar necessário é, usando a equação 1.117, Análise Vetorial F~ · d~r = (2xı̂ − 4x2 ĵ) · dxı̂ = 2x dx Portanto, nesse segmento do trajeto o trabalho vale W1 = ~ r2 Z Z 2x dx = x=1 x=0 ~ r1 2x dx = x2 |10 = 1 J Apenas uso pessoal (1.117) (1.118) No segmento seguinte, temos x = 1 e z = 0, de modo que dx = dz = 0. Nesse segmento, d~r = dy ĵ, e a força fica F~ = 2ı̂ − 4 ĵ Consequentemente, F~ · d~r = (2ı̂ − 4 ĵ) · dy ĵ = −4 dy e o trabalho nesse segmento torna-se W2 = Z ~ r2 −4 dy = ~ r1 y=1 Z y=0 −4 dy = −4y|10 = −4 J (1.119) (1.120) Por último, no terceiro segmento, que tem x = 1 e y = 1, com dx = dy = 0, achamos d~r = dz k̂ e a força vale, nesse trajeto, F~ = 2ı̂ − 4 ĵ + 3z k̂ o que resulta em F~ · d~r = (2ı̂ − 4 ĵ + 3z k̂) · dz ĵ = 3z dz O trabalho realizado nesse segmento é, então, W3 = Z ~ r2 ~ r1 3z dz = Z z=1 3z dz = z=0 3 3z 2 1 = J 2 0 2 (1.121) (1.122) Portanto, o trabalho total realizado no trajeto é dado pela soma dos trabalhos obtidos em cada segmento, dados pelas equações 1.118, 1.120 e 1.122, ou seja, W = W1 + W2 + W3 = 1 − 4 + 3 3 =− J 2 2 (1.123) É interessante ressaltar que, de fato, para a força considerada, o trabalho realizado depende do caminho, pois os resultados para trajetos diferentes são claramente diferentes, conforme mostram as equações 1.115, 1.116 e 1.123. Vejamos um outro exemplo. 1.2. INTEGRAIS DE LINHA K. D. Machado 45 Exemplo 1.16. Uma força dada por F~ = −2yı̂ + 3x ĵ + z k̂ é aplicada sobre uma partı́cula de massa m constante. Determine o trabalho realizado por essa força quando a partı́cula executa uma volta completa numa elipse descrita por onde a e b são constantes positivas. Apenas uso pessoal ~r(t) = a cos tı̂ + b sen t ĵ > > Análise Vetorial Para resolver esse problema vamos utilizar o Maple, porque podemos inclusive aproveitar para visualizar o campo vetorial e o caminho de integração. Iniciamos definindo a força, ou seja, with(Student[VectorCalculus]): F:=VectorField(<-2*y,3*x,z>); F := −2 y êx + 3 x êy + z êz Em seguida, calculamos seu rotacional, para verificar que ela é não-conservativa, por meio de > Curl(F); 5 êz Agora definimos a curva de integração, ou seja, > rc:=<a*cos(t),b*sin(t),0>; rc := a cos(t) êx + b sin(t) êy O próximo passo consiste em montar a integral para o cálculo do trabalho, e aqui usamos o comando LineInt, que fica > LineInt(F,Path(rc,t=0..2*Pi), output=integral); Z 2π 2 b sin(t)2 a + 3 a cos(t)2 b dt 0 Note a opção output=integral, que apresenta a integral sem calcular. Utilizando agora a opção value, temos > LineInt(F,Path(rc,t=0..2*Pi), output=value); 5πba de modo que o trabalho realizado, ao dar uma volta completa na elipse, vale W = 5πab Podemos agora visualizar o campo vetorial e o caminho de integração, usando novamente LineInt, só que agora com a opção output = plot, ou seja, > > > > LineInt(F,Path(subs(a=1,b=2,rc),t=0..2*Pi), output = plot, axes = boxed, vectoroptions = [color=blue], fieldoptions= [color=black, arrows=THIN, orientation=[32,70]], pathoptions=[color=red]); o que resulta na figura 1.7. Vejamos agora alguns exemplos envolvendo o Eletromagnetismo. 46 Apenas uso pessoal Análise Vetorial II K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL Figura 1.7: Gráfico vetorial da força e do caminho de integração para o cálculo do trabalho do exemplo 1.16. Força Eletromotriz Associado a um campo elétrico conservativo temos uma grandeza fı́sica escalar, o potencial elétrico. A um campo elétrico não-conservativo podemos associar uma grandeza escalar chamada força eletromotriz, ou fem 1 E, dada por I (1.124) E~ · d~ℓ E= C onde C é um percurso fechado e E é a circuitação de E~ ao longo desse trajeto. Note que, quando E~ é conservativo, então, recordando 1.105, a qual é válida nesse caso, temos E = 0, campo elétrico conservativo (1.125) Porém, quando E~ é não-conservativo, há uma fem ao longo de um dado trajeto fechado C, e essa fem pode produzir efeitos interessantes se o trajeto for um trajeto fı́sico real formado por condutores, pois, neste caso, haverá circulação de corrente elétrica por eles. Esse fenômeno está ligado à indução eletromagnética, e foi investigado por Faraday. Vejamos agora alguns exemplos. Exemplo 1.17. Um campo elétrico dado por E~ = xyı̂ − 3xz ĵ + 4y 3 z 2 k̂ existe numa certa região, situada no vácuo. Todas as unidades são do SI. Determine 1. Densidade volumétrica de carga na região. 2. Verifique se o campo elétrico é não-conservativo. 3. Calcule a fem produzida num circuito fechado formado pelos segmentos de retas definidos entre os pontos da figura 1.8 abaixo. 1 O nome força eletromotriz tem razões históricas, mas essa grandeza não é uma força. 1.2. INTEGRAIS DE LINHA K. D. Machado 47 z B (0,0,2) C2 C (0,3,0) C3 Análise Vetorial C1 A (4,0,0) x Figura 1.8: Circuito fechado para o cálculo de uma fem. Apenas uso pessoal y Vamos iniciar determinando a densidade volumétrica de carga presente na região, dado pela equação ??, ̺ ∇ · E~ = ǫ que é a lei de Gauss elétrica, de modo que temos ̺ = ε0 ∇ · E~ = ε0 ∂E x ∂x + ∂Ey ∂Ez + ∂y ∂z onde usamos a equação ?? para o divergente de E~ . Temos então, ̺ = ε0 (y + 8y 3 z) que estabelece a densidade volumétrica de carga na região. Em seguida, determinamos se o campo é conservativo calculando seu rotacional, mediante a equação ??, ou ı̂ ∂ ~ ∇× E = ∂x xy ĵ ∂ ∂y −3xz k̂ ∂ = (12y 2 z 2 + 3x)ı̂ + (−3z − x) k̂ ∂z 4y 3 z 2 ∇ × E~ = 3(x + 4y 2 z 2 )ı̂ − (x + 3z) k̂ Como o campo elétrico tem um rotacional diferente de zero, não é conservativo. Vamos agora determinar a fem no circuito mostrado na figura 1.8. Inicialmente vamos precisar das equações das retas que compõem o circuito. Para a reta C1 , temos, já que é uma reta no plano xy, de forma que podemos aplicar a equação ??, y − yA = ou y−0= ou ainda, yC − yA (x − xA ) xC − xA 3−0 3 (x − 4) = − (x − 4) 0−4 4 48 K. D. Machado 3x + 3, 4 Para a reta C2 , efetuamos um procedimento similar, isto é, y=− z − zC = ou Análise Vetorial z−0= ou então, z=0 zB − zC (y − yC ) yB − yC 2−0 2 (y − 3) = − (y − 3) 0−3 3 C2 : z=− 2y +2, 3 x=0 Por fim, para a reta C3 temos ou ou seja, x − xB = x−0= xA − xB (z − zB ) zA − zB 4−0 (z − 2) = −2(z − 2) 0−2 C3 : x = −2z + 4 , y=0 A fem no circuito fechado é dada por 1.124, ou E= I E~ · d~ℓ C E= Z E~ · d~ℓ1 + Z C2 C1 (1.126) E~ · d~ℓ2 + Z E~ · d~ℓ3 C3 Apenas uso pessoal C1 : 1. INTEGRAÇÃO ESCALAR E VETORIAL (1.127) (1.128) Vamos efetuar cada integral separadamente. Na reta C1 , temos Z Z ~ ~ (xyı̂ − 3xz ĵ + 4y 3 z 2 k̂) · (dxı̂ + dy ĵ + dz k̂) E · dℓ1 = C1 C1 Como z = 0 e dz = 0, ficamos com Z E~ · d~ℓ1 = Z 0 xy dx = 4 C1 Z 4 0 Z 0 3x 3x2 − + 3 dx = + 3x dx x − 4 4 4 onde usamos a equação 1.126. Achamos assim Z x3 3x2 0 E~ · d~ℓ1 = − + = (16 − 24) = −8 V 4 2 4 C1 Na reta C2 , temos Z E~ · d~ℓ2 = C2 Como x = 0 e dx = 0, obtemos Z C2 (xyı̂ − 3xz ĵ + 4y 3 z 2 k̂) · (dxı̂ + dy ĵ + dz k̂) (1.129) 1.2. INTEGRAIS DE LINHA 49 K. D. Machado Z E~ · d~ℓ2 = Z 4y 3 z 2 dz C2 C2 A equação 1.127 estabelece que 2y +2 3 Reescrevendo essa equação, temos Análise Vetorial y= 3 3z (z − 2) = −3 2 2 e então, ficamos com Z C2 ou E~ · d~ℓ2 = Z 0 2 3 2 Apenas uso pessoal z=− 27 (z − 2)3 z 2 dz 2 0 8 Z Z 27 2 3 27 2 5 2 2 = (z − 6z + 12z − 8)z dz = (z − 6z 4 + 12z 3 − 8z 2 ) dz 2 0 2 0 12z 4 8z 3 2 27 z 6 6z 5 − + − = 2 6 5 4 3 0 4 3z −3 z 2 dz = 4 Z 16 96 27 25 6 × 25 8 × 23 32 = 27 E~ · d~ℓ2 = − + 3 × 24 − − + 24 − 2 3 5 3 3 5 3 C2 16 96 −80 − 288 + 360 72 = 27 − − = − V (1.130) + 24 = 27 3 5 15 5 Z Agora, considerando a reta C3 , temos Z Z ~ ~ (xyı̂ − 3xz ĵ + 4y 3 z 2 k̂) · (dxı̂ + dy ĵ + dz k̂) E · dℓ3 = C3 C3 Como y = 0 e dy = 0, obtemos Z E~ · d~ℓ3 = C3 Z 0=0 C3 Consequentemente, a fem vale, usando as equações 1.129–1.131, E = −8 − 112 72 +0=− V 5 5 (1.131) Exemplo 1.18. Um campo elétrico numa dada região cilı́ndrica é dado, em coordenadas cilı́ndricas, por 5 E~ = θ̂ ρ (1.132) onde ρ 6 10 e −4 6 z 6 4. Existe na região um circuito quadrado cujos vértices estão situados no plano xy nas coordenadas retangulares A(1, 1, 0), B(−1, 1, 0), C(−1, −1, 0) e D(1, −1, 0). Este circuito é formado por fios condutores que formam as arestas, sendo que cada aresta tem uma resistência elétrica R = 5 Ω. Determine a potência elétrica dissipada pelo circuito quando o campo elétrico dado por 1.132 é ligado. 50 K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL Inicialmente vamos verificar se o campo em questão é ou não conservativo, calculando seu rotacional. Vamos utilizar o Maple para isso, mediante, > > with(Student[VectorCalculus]): SetCoordinates(cylindrical); cylindrical r, θ, z E:=VectorField(<0,5/r**2,0>); E := Curl(E); Análise Vetorial > 5 êθ r2 − 5 êz r3 Apenas uso pessoal > Como o rotacional de E~ é não-nulo, temos um campo não conservativo. Agora, usamos o comando LineInt para o cálculo da fem E, dada por 1.124, I E~ · d~ℓ E= C Como o caminho é descrito em coordenadas retangulares, inicialmente mudamos o sistema de coordenadas para esse sistema, ou seja, > SetCoordinates(cartesian[x,y,z]); cartesian x, y, z Em seguida, calculamos o valor da fem mediante LineInt(E,LineSegments(<1,1,0>,<-1,1,0>,<-1,-1,0>,<1,-1,0>, <1,1,0>), output=value); √ 20 2 √ de modo que temos E = 20 2 V. Para visualizar a integral efetuada, utilizando a opção integral em output, resultando em > > > > LineInt(E,LineSegments(<1,1,0>,<-1,1,0>,<-1,-1,0>,<1,-1,0>, <1,1,0>),output=integral); R1 R1 10 10 2 0 3 dt + 2 3 dt 0 2 2 ((1−2t) +1) 2 ((−1+2t) +1) 2 e, por fim, para visualizarmos o campo elétrico e o circuito, utilizamos a opção plot, como em > > > > LineInt(E,LineSegments(<1,1,0>,<-1,1,0>,<-1,-1,0>,<1,-1,0>, <1,1,0>),output=plot,axes=boxed,vectoroptions=[color=blue], fieldoptions=[color=black,arrows=‘THIN‘], pathoptions=[color=red]); o que resulta na figura 1.9, Agora que temos a fem, utilizamos a relação E2 R para determinar a potência dissipada no circuito. Achamos, portanto, P = P = (1.133) 800 = 160 W 5 K. D. Machado Figura 1.9: Campo elétrico e circuito para o cálculo da fem do exemplo 1.18. Apenas uso pessoal Análise Vetorial 1.2. INTEGRAIS DE LINHA 51 A circuitação do campo elétrico ao longo de um circuito C nos fornece a fem que surge nesse circuito e, sendo o circuito formado por condutores, neles haverá a produção de corrente elétrica. Vejamos agora o que ocorre no caso magnético. III Circuitação de Campo Magnético ~ podemos determinar sua circuitação ζ ao longo de um dado trajeto C Dado um campo magnético B, por meio de I ~ · d~ℓ B (1.134) ζ= C Aqui é instrutivo calcularmos a circuitação ao longo de curvas diferentes para um mesmo campo magnético. Em particular, vamos considerar um fio muito longo, fino e retilı́neo, percorrido por uma corrente i. Definindo o eixo z paralelo ao fio e orientado no mesmo sentido em que a corrente passa por ele, o campo magnético a uma distância ρ medida a partir do fio é dado por ~ = µ0 i θ̂ B 2πρ (1.135) Considere inicialmente uma curva C1 dada por uma circunferência de raio ρ centrada no fio e situada num plano perpendicular a ele, como mostra a figura 1.10. Neste caso, podemos usar o elemento d~ℓ em coordenadas polares, dado por d~ℓ = ρ dθ θ̂, visto que ρ é constante e dρ = 0. Portanto, a circuitação 1.134 torna-se I I I µ0 i µ0 i µ0 i ~ · d~ℓ = B ζ= θ̂ · ρ dθ θ̂ = 2π = µ0 i dθ = 2π C 2π C 2πρ C 52 B dl i r C1 Apenas uso pessoal Análise Vetorial K. D. Machado 1. INTEGRAÇÃO ESCALAR E VETORIAL Figura 1.10: Curva C1 para o cálculo da circuitação do campo magnético gerado por um fio retilı́neo muito longo e fino.
Baixar