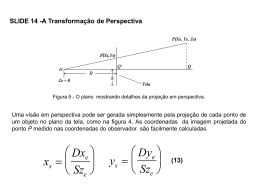
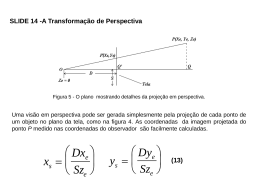
SLIDE 1 – Transformações - Translação A transformação que translada um ponto para um novo ponto é: x y z 1 x 1 0 y z 1 0 T x 0 1 0 Ty 0 0 1 Tz 0 0 0 1 onde , e são os componentes da translação nas direções x, y e z, respectivamente. (1) SLIDE 2 – Transformações – Rotação Em três dimensões, é bastante útil projetar transformações de rotação em torno de cada um dos três eixos coordenados, como mostrado abaixo: Figura 1 - As três rotações tridimensionais primitivas. Ângulos são medidos em sentido horário quando olhamos na direção do eixo de rotação, através da origem. SLIDE 3 – Transformações Rotação de um ângulo , em torno do eixo z (Figura 1a), é obtida transformação: x y z 1 x cos sin y z 1 0 0 sin cos 0 0 0 0 1 0 com a seguinte 0 0 0 1 (2) SLIDE 4 – Transformações Rotação de um ângulo , em torno do eixo coordenado y (Figura 1b) é dado por: x y z 1 x y cos 0 z 1 sin 0 0 sin 1 0 0 cos 0 0 0 0 0 1 (3) SLIDE 5 – Transformações Rotação de um ângulo , em torno do eixo coordenado x (Figura 1c) é realizada por: x y z 1 x 0 1 0 cos y z 1 0 sin 0 0 0 sin cos 0 0 0 0 1 (4) SLIDE 6 – Transformações – Mudança de Escala Uma transformação de Mudança de Escala pode ser usada para escalar dimensões em cada direção coordenada separadamente: x y z 1 x Sx 0 y z 1 0 0 0 Sy 0 0 0 0 Sz 0 0 0 0 1 (5) SLIDE 7- Transformações Inversas A maioria das transformações dadas acima têm inversa, que realiza a transformação simetricamente oposta. A inversa da matriz de translação é x y z 1 x 1 0 y z 1 0 T x 0 1 0 Ty 0 0 1 Tz 0 0 0 1 (6) que desfaz o efeito da translação da equação dada anteriormente. A inversa da primeira matriz de rotação mostrada (rotação de em torno de z) é, simplesmente: cos sin 0 0 sin cos 0 0 0 0 0 0 1 0 0 1 (7) que é uma rotação de mesma magnitude, em torno do mesmo eixo, mas na direção oposta. SLIDE 8 - Concatenação A aplicação sucessiva de várias transformações sucessivas pode ser resumida em uma simples matriz de transformação, a concatenação da seqüência. Suponha que duas transformações T1 e T2 tenham que ser aplicadas sucessivamente. O mesmo efeito pode ser obtido com a aplicação de uma única transformação T3, que é simplesmente o produto das matrizes T1 e T2. Isto pode ser prontamente demonstrado: o ponto é transformado em por T1: x y z 1 x y z 1 T1 (8) O ponto é então gerado pela aplicação de T2: x y z 1 x y z 1 T2 (9) Substituindo uma equação na outra, temos: x y z 1 x y z 1 T1 T2 x y z 1 T1T2 (10) A ordem de aplicação das transformações deve ser preservada quando as matrizes de transformação são unidas pela multiplicação. SLIDE 9 - Transformações em Modelamento Figura 2 - Modelamento de um automóvel pela instanciação de símbolos e transformações. SLIDE 10 - Transformações em Modelamento Se escrevemos um ponto medido no sistema i por Pi, podemos escrever esta observação como Pw Pb Tbw A conversão para coordenadas do “mundo” fica Pw PT b bb Tbw Pb TbbTbw Se o carro vai se mover 10 metros para o norte, a transformação é convenientemente expressa em coordenadas do “mundo” por uma translação na direção (assumindo que aponta para o Norte): Pw Pb TbwTww Neste caso, é multiplicado posteriormente por uma transformação que representa a mudança. Estes dois exemplos ilustram que a ordem de transformação é determinada pelo sistema de coordenadas no qual a mudança é mais convenientemente expressa. SLIDE 11 - Transformações em Modelamento Transformações em modelamento são também usadas para instanciar um símbolo em diferentes localizações em um modelo. Para continuar o exemplo anterior, consideremos os quatro pneus. Podemos utilizar um único modelo da geometria do pneu e executar quatro transformações diferentes para especificar onde os pneus deverão estar localizados em relação ao sistema de coordenadas do “corpo”. O pneu dianteiro direito, por exemplo, é descrito pela transformação que converte coordenadas medidas no sistema do “pneu” para o sistema de coordenadas do “corpo”: Pb PT t tb Se o pneu é rodado em torno do seu eixo , como deve ocorrer quando o automóvel se move para frente, a transformação para as coordenadas do carro fica Pb PT t tt Ttb Pt Ttt Ttb onde é uma matriz de rotação primitiva que roda em torno do eixo x. O que é realmente necessário, obviamente, é converter as coordenadas do pneu para o sistema de coordenadas do “mundo”. Concatenando todas as transformações relevantes, obtemos Pw Pt Ttt Ttb Tbw SLIDE 12 - Transformações em Visualização Figura 3 - O sistema de coordenadas do observador tem sua origem no ponto de vista e o eixo aponta na direção da visão. O sistema de coordenadas é da “mão-esquerda” Uma transformação V, a transformação de visualização, é usada para converter pontos no sistema de coordenadas do “mundo” em pontos no sistema de coordenadas do observador x e ye ze 1 xw yw zw 1 V (11) SLIDE 13 - Transformações em Visualização Esta transformação pode ser construída a partir de várias translações e rotações que são determinadas a partir de parâmetros de visualização. A seção 7 tem um exemplo de derivação de V a partir de parâmetros de visualização. Figura 4 - A projeção de perspectiva do ponto P na Tela de visualização. Nós adotamos a convenção que o sistema de coordenadas do “olho” é um sistema de coordenadas cartesiano de “mão-esquerda”: o eixo aponta para a frente a partir do Ponto de Vista, o eixo para a direita, e o eixo para cima. Estas convenções são escolhidas de tal forma que os eixos e fiquem alinhados com os eixos x e y da tela (veja Figura 4). O nome “mão-esquerda” vem do método utilizado para lembrarmos as relações de eixos. Se colocarmos a mão esquerda em uma posição tal que o polegar e o indicador estejam estendidos, de tal forma que os mesmos fiquem alinhados com as direções x e y, respectivamente, a direção z é apontada a partir da palma da mão e pode ser indicada pelo dedo médio.
Baixar