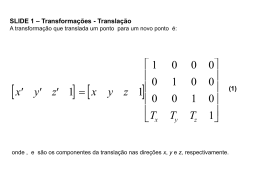
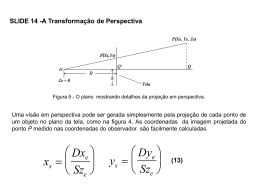
Transformações Geométricas Monge - 1801 - Geometrie Descriptive Em Computação Gráfica exprimimos estas transformações através da Geometria Afim: • as coordenadas de um ponto P’(x’, y’, z’), resultante de uma transformação afim aplicada ao ponto P(x,y,z), são obtidas através de uma função linear do tipo: P’ = M . P + B • A Geometria Afim transforma: – retas paralelas em retas paralelas – pontos finitos em pontos finitos Transformações afins: translação, rotação, escalamento, espelhamento e cizalhamento Transformações Geométricas P’ = M . P + B x’ y’ z’ = a11 a21 a31 a12 a22 a32 a13 a23 a33 x y z + b1 b2 b3 No caso das transformações 2D, a matriz M reduz-se a uma matriz 2 X 2. A cada tipo de transformação, corresponde uma matriz M diferente. Translação Um objeto é transladado, transladando-se todos os seus pontos. Um segmento de reta é transladado, transladando-se os seus pontos extremos, e traçando-se uma nova linha entre eles. P = (x,y) y x’= x + dx y’= y + dy P’ y’ P’ = P + T dy y P dx x dx x’ x T = dy Transformações afins • Rotação - Movimenta um ponto através de uma rotação efetuada em torno da origem das coordenadas. • Escalamento - transforma um objeto em um outro menor e mais próximo da origem y y > 0 P x P’ x Transformações afins Espelhamento - é a rotação em torno de um eixo, de tal forma que é gerada a imagem especular do objeto. Pode-se também fazer o espelhamento em torno de um segmento genérico qualquer. Cizalhamento - provoca a deformação do objeto, mantendo, entretanto, uma direção paralela. y y Cizalhamento na direção x Espelhamento em torno de um segmento genérico x x Coordenadas Homogêneas As matrizes apresentadas não permitem que se combinem transformações facilmente, isto é, pela multiplicação das matrizes de transformações geométricas correspondentes a cada transformação. As coordenadas homogêneas permitem que este efeito possa ser obtido. mapeamento de N em N+1 espaço N [ a b]T espaço N+1 [ aw bw w]T Coordenadas Homogêneas Quando se exprimem pontos em coordenadas homogêneas, as transformações geométricas podem ser tratadas todas de uma mesma forma, como multiplicações: P’ = M . P M é chamada Matriz de Transformação. P é da forma [ x y 1]T e w foi tomado com o valor arbitrário 1. projeção de N+1 em N espaço N [ a/w b/w]T espaço N+1 [ a b w]T Translação x’ y’ 1 1 0 0 = 0 1 0 dx dy 1 x y 1 T(dx, dy) Como se processa um conjunto de translações? dx1 dy1 P dx2 dy2 P’ P’’ A matriz M, que leva de P a P’’, é dada pelo produto T1 . T2, ou seja, T(dx1+dx2, dy1+dy2) . T é dita Matriz Composição de T1 e T2 Translações sucessivas são aditivas. Escalamento x’ y’ 1 Sx 0 0 = 0 Sy 0 0 0 1 x y 1 S(Sx, Sy) Como se processa um conjunto de escalamentos? Sx1 Sy1 P Sx2 Sy2 P’ P’’ A matriz M, que leva de P a P’’, é dada pelo produto S1 . S2, ou seja, S (Sx1.Sx2, Sy1.Sy2). M é dita Matriz Composição de S1 e S2 Escalamentos sucessivos são multiplicativos. Rotação x’ y’ 1 cos sin sin cos 0 0 = 0 0 1 x y 1 R () Como se processa um conjunto de rotações? 1 P 2 P’ P’’ A matriz M, que leva de P a P’’, é dada pelo produto R1 . R2, ou seja, R (1 + 2). Rotações sucessivas são aditivas. Composição de transformações Exemplo: Rodar um objeto em torno de um ponto P1. Neste caso, M será dada pelas seguintes transformações: • Transladar P1 para a origem • Rodar o objeto do ângulo estipulado • Transladar da origem para P1 M = T(x1, y1) . R ( ) . T (-x1, -y1) T (-x1, -y1) P1 R ( ) T(x1, y1) P1 Os produtos não são comutativos P1 Considerações sobre eficiência A Matriz Composição de translações, rotações e escalamentos tem a forma geral: r11 r21 0 r12 r22 0 tx ty 1 composição de R e S Multiplicar M por P para calcular P’ exige 9 multiplicações (ponto flutuante) mais 6 adições. É mais eficiente fazer: x’ = r11 . x + r12 . y + tx y’ = r21 . x + r22 . y + ty Usando-se estas fórmulas serão feitas 4 multiplicações mais 4 adições Mudança de sistema de coordenadas Sistema de coordenadas locais - o de um objeto; por exemplo, o de uma peça de mobiliário (cadeira, mesa) Sistema de coordenadas universais - o da cena; por exemplo, da sala que está sendo mobiliada. Uma mudança de coordenadas é feita de um sistema “J” para um sistema “I”, transformando-se os eixos de “I” nos eixos do sistema “J”. A Matriz Composição que permite estas transformações deve ser aplicada a todos os objetos do sistema “J”. P 8 4 2 P1 = (10,8) 5 P2 = (6,6) P4 = (4,2) 2 4 2 1 4 10 Para transformar do sistema 2 para o sistema 1, transladamse os eixos de 1 até coincidirem com os de 2 -> T(4,2) Mudança de sistema de coordenadas Para transformar de “J” em “I”, tem-se: j Pi = M i j . P Para transformar de “I” em “J”, tem-se: -1 Pj =M i j . Pi Sempre existem as matrizes inversas das matrizes de transformação Para transformar do sistema 4 para o sistema 1, é necessário aplicar-se rotação e escalamento, porque as divisões de escala neste sistema são a metade de cada divisão do 1. Ver detalhes no livro do Foley. Estas matrizes são utilizadas nos problemas de composição de objetos. Transformações 3D É uma generalização do problema 2D. As matrizes de translação e escalamento recebem uma componente correspondente à coordenada z, e as matrizes se tornam 4 X 4. A rotação no espaço é decomposta em três componentes: uma relativa a cada eixo. y > 0 z Regra da mão direita x Transformações 3D cos() -sin() 0 0 Rz() = sin() cos() 0 0 0 0 1 0 0 0 0 1 Rx() = cos() Ry() = 0 - sin() 0 0 1 0 0 sin() 0 cos() 0 1 0 0 0 0 0 0 1 0 0 0 cos() -sin() 0 sin() cos() 0 0 0 1 Matrizes inversas A matriz T(dx, dy,dz) tem como matriz inversa: T(-dx, -dy, -dz) A matriz S(Sx, Sy, Sz) tem como matriz inversa: S( 1 , 1 , 1 ) Sx Sy Sz A matriz R() tem como inversa a matriz: R (- ) = RT () Rotação em torno de uma linha no OpenGl Exemplo: Rodar um objeto de 45o em torno de uma linha que liga a origem ao ponto (1,2,3), mantendo fixo o ponto (4,5,6). primitivas Model-view Projection Pipeline OpenGl glMatrixMode(GL_MODELVIEW) glLoadIdentity ( ) ---------------------------- C = I glTranslatef(4.0,5.0,6.0) ------------------- C = C * T(P) glRotetef(45,1.0,2.0,3.0) ------------------- C = C * R (45) glTranslatef(-4.0,-5.0,-6.0) ---------------- C = C * T(-P) Matriz Model-view Matriz de transformações genéricas A Matriz Composição de translações, rotações e escalamentos tem a forma geral: r11 r21 r31 0 r12 r22 r32 0 r13 tx r23 ty r33 tz 0 1 composição de R e S Problema: Transformar o sistema 1 no sistema 2 y P3 1 P1 z y P3 P2 x 2 P2 z P1 x Complementação As transformações de translação e rotação são chamadas transformações rígidas porque não deformam o objeto. Já a transformação de escala e o cizalhamento deformam o objeto, alterando o tamanho ou os ângulos. 1 a 0 SHx = 0 1 0 0 0 1 Obs: A transformação de x é proporcional a y SHy 1 = b 0 0 1 0 0 0 1 Referências Bibliográficas Foley et al. Cap. 5 Correia, A. M. de A. Perspectivas de superfícies poliédricas auxiliadas por computador. Escola Politécnica da Universidade de São Paulo, São Paulo, SP. Dissertação de Mestrado, 1991. (Departamento de Eng. de Construção Civil)
Baixar