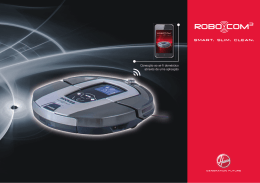
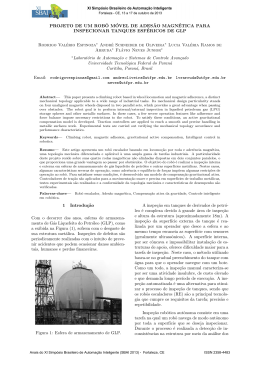
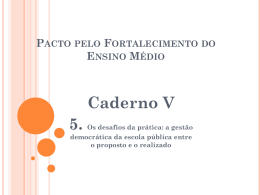
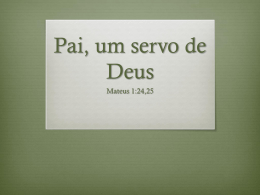
CONTROLE SERVO VISUAL PARA O RASTREAMENTO DE TRAJETÓRIA DEFINIDA POR RETAS: TEORIA E RESULTADOS EXPERIMENTAIS Pedro M. Shiroma∗ José R.H. Carvalho∗ [email protected] [email protected] Geraldo F. Silveira ∗ [email protected] ∗ Centro de Pesquisas Renato Archer - CenPRA Divisão de Robótica e Visão Computacional - DRVC Rodovia Dom Pedro I, km 143,6 CEP 13082-120, Campinas-SP, Brasil ABSTRACT 1 INTRODUÇÃO This work proposes a visual servoing solution to the hallway following problem applied to a mobile robot. The goal is to follow a line parallel to the corridor that can be defined as the intersection of the floor with the wall. The problem consists in capturing the image, to segment and extract the line, real-time tracking and parameters computing of the line and control signals determination based on the so called interaction matrix and robot Jacobian. The results were obtained using a Nomad 200 mobile robot with a non-calibrated CCD camera mounted on a pan-tilt as the experimental setup. O uso da visão como fonte de informações sensoriais é amplamente pesquisado em robótica. Tal interesse deve-se principalmente ao fato deste sensor (câmera) ser um elemento de medida passivo, ou seja, que não necessita de contato fı́sico, apresentar alta densidade de dados por imagem, amplo campo de cobertura e boa taxa de amostragem a um baixo custo. O aumento do desempenho dos recursos computacionais aliado a novos resultados em áreas como visão computacional, processamento de imagens e controle de sistemas permitiu incluir a informação visual dentro de uma malha de controle fechada, criando um campo atualmente conhecido como controle servo visual. KEYWORDS: Vision-based control, mobile robotic, robot navigation, visual servoing. RESUMO Este trabalho propõe uma solução utilizando técnicas de controle servo visual (visual servoing) para o problema de seguimento de trajetória aplicado a um robô móvel. O objetivo é percorrer uma reta definida pelo rodapé de um dos corredores do laboratório. O problema envolve as tarefas de captura da imagem, segmentação e extração do rodapé, rastreamento e cálculo dos parâmetros da reta em tempo real, determinação da velocidade da câmera necessária para realizar a tarefa, baseado na chamada matriz de interação, e posterior transformação para o sistema de coordenadas dos atuadores. Os resultados foram obtidos utilizando como plataforma experimental um robô móvel Nomad 200, com uma câmera CCD não-calibrada montada sobre um pan-tilt. PALAVRAS-CHAVE: Controle baseado em visão, controle servo visual, robôs móveis, navegação robótica. Neste trabalho, a metodologia proposta por Espiau et al. (1992) é aplicado ao controle servo visual de uma classe de robô móvel não-holonômico com rodas. O problema consiste em percorrer os corredores do laboratório utilizando apenas a informação visual para guiar-se sem, entretanto, determinar a postura do alvo em relação ao robô, o que envolveria a reconstrução 3D da cena e a calibração da câmera. A solução baseia-se na chamada matriz de interação cujo propósito é estender o Jacobiano do robô ao plano imagem através de primitivas geométricas. Tal abordagem difere das soluções clássicas onde o controle é realizado no espaço Cartesiano, necessitando apenas de uma única reta na imagem e fornece uma formulação matemática que permite o desenvolvimento de diversas outras tarefas servo visuais. Resultados experimentais dos efeitos da adição de um grau de liberdade (g.d.l.) sobre a manobrabilidade do sistema é apresentado para dois casos: i) dois graus de liberdade, composto de uma translação e uma rotação e ii) três graus de liberdade, onde o movimento de pan adiciona uma rotação ao sistema. A plataforma experimental consiste de um robô móvel Nomad 200 com uma câmera CCD não-calibrada preto-e-branco, montada sobre um pan-tilt. Uma placa de captura DT-3155 digitaliza e transfere a imagem para a CPU embarcada composta por um Pentium 133 Mhz com 32 Mbytes de memória RAM rodando um sistema VI Simpósio Brasileiro de Automação Inteligente. Bauru, setembro de 2003 828 operacional Linux. Na seção 2 o problema a ser resolvido é formalmente definido, a seção 3 apresenta a solução proposta baseada na abordagem de controle servo visual bem com as duas matrizes de Jacobiano do robô utilizadas, na seção 4 são apresentadas as técnicas de visão computacional usadas para extrair e rastrear os parâmetros da reta correspondente ao rodapé em tempo real. A validação experimental encontra-se na seção 5 e a discussão dos resultados na seção 6. ρ y θ x o 2 FORMULAÇÃO DO PROBLEMA Figura 2: Parametrização da reta. T Tc = V Ω ∈ se(3)2 a postura (posição e orientação) e velocidade (translacional e rotacional) da câmera em relação ao alvo, respectivamente. Considere uma imagem obtida da câmera e seja s um vetor de m parâmetros de caracterı́sticas visuais extraı́do a partir dela. Segundo a abordagem proposta por Espiau et al. (1992), a relação entre a variação do sinal s na imagem com a velocidade Tc no espaço cartesiano é dada através da chamada matriz de interação (LT ) definida como: ṡ = d Figura 1: Tarefa servo visual para seguimento de corredores. O objetivo deste trabalho é a aplicação de controle baseado em visão utilizando apenas componentes disponı́veis comercialmente. Dentre as possı́veis tarefas realizáveis por visão, escolhemos a classe dos problemas de seguimento de trajetória utilizando marcas naturais. Diversas aplicações podem ser encontradas para este tipo de problema, como a inspeção de oleodutos e linhas de transmissão (Bueno et al., 2002), e na direção de veı́culos em auto-estradas(Chen and Tsai, 1997). Este trabalho concentrase no uso de marcos naturais em ambientes estruturados e, em especial, o seguimento da trajetória definida a partir do rodapé de um corredor. A configuração desejada é tal que o robô deve manter-se a uma distância determinada d da parede e a câmera deve permanecer paralelo ao corredor movendo-se a uma velocidade constante A fig. 1 ilustra a trajetória esperada que o robô realize durante a tarefa. A janela representa a imagem do corredor observada por uma câmera montada sobre o robô. 3 CONTROLE SERVO VISUAL BASEADO NA IMAGEM Considere um robô móvel com uma câmera acoplado sobre ele. Seja T ⊆ SE(3)1 o espaço de trabalho que representa o espaço de todas as possı́veis configurações espaciais para a câmera, e n os graus de liberdade do sistema. Seja r̄ ∈ T e 1 SE(3) e ´ a notac¸a˜o para o grupo Euclideano Especial e corresponde ao espac¸ o de configuraco˜ ¸es de corpos rı́gidos (posic¸a˜o e orientac¸a˜o) definido como SE(3) = R3 × SO(3) ∂s dr̄ • = H • T c = L T Tc , ∂ r̄ dt (1) onde H é o tensor de interação, • é o produto entre dois tensores, T Tc = vx vy vz ωx ωy ωz é o tensor de velocida0 I3 des da câmera e LT = H a forma matricial do tensor I3 0 de interação, tal que posto(LT ) = m. Seja s(r̄(t)) os valores associados à uma certa postura do robô no instante t. Define-se de forma análoga ao conceito de ligação rı́gida na mecânica, o conceito de ligação virtual para uma matriz de interação como sendo o conjunto de movimentos T ∗ que mantém inalterados o sinal de s, ou seja: ṡ = LT T ∗ = 0. (2) Temos que T ∗ ∈ S ∗ onde S ∗ é uma base para o espaço nulo de LT , N (LT ). A dimensão de S ∗ é chamada de classe da ligação virtual, dim(S ∗ ) = n − m. Demais informações podem ser obtidas em (Chaumette et al., 1993). 3.1 Matriz de Interação para Retas Uma reta no espaço cartesiano tridimensional pode ser descrita como a intersecção de dois planos: h1 (x, p1 ) h2 (x, p2 ) = a1 x + b1 y + c 1 z + d 1 = a2 x + b2 y + c 2 z + d 2 =0 . =0 (3) Uma representação mı́nima para a projeção da reta no plano T imagem é dada pelos parâmetros polares s = θ ρ , tal que: g(X, P ) = X cos θ + Y sin θ − ρ = 0, 2 se(3) (4) e´o espac¸ o tangenteà SE(3) VI Simpósio Brasileiro de Automação Inteligente. Bauru, setembro de 2003 829 onde (ver Fig. 2): 1 √−c 2 ρ = cos θ = √ a21 = √ sin θ a1 +b21 (5) a1 +b21 b1 a21 +b21 cuja matriz de interação demonstrada em (Espiau et al., 1992) é dada por: T Lθ λθ cos θ λθ sin θ −λθ ρ ... = LT = LTρ λρ cos θ λρ sin θ −λρ ρ −ρ cos θ −ρ sin θ −1 ... (6) (1 + ρ2 ) sin θ −(1 + ρ2 ) cos θ 0 com λθ λρ = = (a2 sin θ − b2 cos θ)/d2 (a2 ρ cos θ + b2 ρ sin θ + c2 )/d2 . (7) Para o caso bidimensional T = SE(2) onde o movimento do robô está limitado ao plano X − Z temos que a matriz de interação pode ser reduzida a: λθ cos θ −λθ ρ −ρ sin θ T L = (8) λρ cos θ −λρ ρ −(1 + ρ2 ) cos θ e a base da ligação virtual neste caso é: −c1 /a1 S∗ = 1 0 (9) com λ > 0 obtemos a seguinte expressão para um controlador de velocidade manipulando as equações (11) e (12): ! −1 c c ∂e ∂e Tc = −λe − (13) ∂ r̄ ∂t c ∂e ∂e ∂s T +c onde c ∂ r̄ pode ser escolhido como I6 , ∂t = L ∂t (Espiau c ∂s et al., 1992) sendo que ∂t representa uma estimativa do movimento próprio do alvo. Freqüentemente é desejável selecionar mais caracterı́sticas visuais do que o necessário, com o objetivo de acrescentar redundância na tarefa ou evitar singularidades (Chaumette et al., 1993). Para dim(S ∗ ) 6= 0 procura-se combinar a tarefa servo visual com outra tarefa capaz de controlar os graus de liberdades livres. A abordagem de tarefa hı́brida propõe que a função tarefa assuma a forma e = [eT1 , eT2 ]T composta de uma tarefa principal e1 , baseada no sensor, e uma tarefa T s secundária e2 = ∂h de dimensão n − m expressa como a ∂ r̄ minimização da função de custo hs sob a restrição e1 = 0. Uma tarefa hı́brida pode ser definida como e(r̄, t) = W + e1 (r̄, t) + βW ⊥ e2 (14) onde: • e1 (r̄(t), t) = C(s − s∗ ) é a tarefa de controle servo visual, • e2 é uma tarefa secundária definida no espaço nulo de LT , que corresponde a uma ligação de classe 1 do tipo prismático. O movimento livre é uma translação paralela à reta −c1 /a1 x + z. • W é uma matriz que permite levar em conta mais sensores que o necessário tal que N (W ) = N (LT ) 3.2 Projeto do Controlador • W ⊥ é o operador de projeção ortogonal no espaço nulo de W , ou seja, W ⊥ = I − W W + . A maioria das leis de controle servo visuais baseadas na imagem calculam os sinais a serem transmitidos aos atuadores através de uma equação na forma: Tc = f (C(t), s(r̄(t)), s∗ (t)) (10) Onde C(t) é uma matriz relacionada à LT , s∗ (t) é a trajetória desejada para os parâmetros s alcançarem a postura desejada c é r̄d , sendo freqüentemente escolhida como sd = s(r̄d ), (·) o valor estimado, (·)+ é a pseudo-inversa de Moore-Penrose e f pode ser uma função simples como um ganho proporcional ou algo mais complexo, como um controle não-linear ou LQG (Silveira et al., 2002). A abordagem de função tarefa proposta em (Samson et al., 1991) consiste numa forma organizada de combinar diversos objetivos de controle. Denomina-se uma função tarefa e(r̄, t) como sendo uma classe de funções de saı́da associadas à equação de estados do robô que dependam apenas da postura do robô e da variável tempo. O problema de controle é expresso através da regulação da função tarefa, ou seja, uma tarefa é considera completa num intervalo [0, T ] se e(r̄, t) = 0 para todo t ∈ [0, T ]. Sabendo que ∂e ∂e ė(r̄, t) = Tc + ∂ r̄ ∂t (11) e de modo a obter um comportamento de sistema de primeira ordem e um decaimento exponencial de e(r, t), isto é ė = −λe (12) • C é uma matriz de combinação e pode ser escolhido como + W LT . • β é número escalar de ponderação. ∂s Considerando o caso de um alvo sem movimento c ∂t = 0, a equação (13) torna-se então: Tc = −λe − βW ⊥ ∂e2 ∂ r̄ T , (15) onde a função de custo secundária geralmente é definida a priori e sua forma é portanto conhecida. 3.3 Determinação dos sinais de atuação Seja Jr o Jacobiano do robô, a matriz que transforma as velocidades dos atuadores do robô, u, para a velocidade do sistema de coordenadas da câmera. Os sinais transmitido aos atuadores são calculados invertendo-se a equação Tc = Jr u: u = Jr+ Tc , (16) onde Tc é dada pela equação (15). O cálculo do Jacobiano do robô é realizado através da aplicação da relação de transferência de velocidade através de juntas de revolução, e será ilustrado para os casos onde o robô de superfı́cie possui dois e três graus de liberdade. VI Simpósio Brasileiro de Automação Inteligente. Bauru, setembro de 2003 830 4 ASPECTOS DE VISÃO COMPUTACIONAL Considere os sistemas de coordenadas do Nomad 200 (Fig. 3) onde Fb , Ft , Fp e Fc correspondem aos sistemas associados à base, torre, pan-tilt e a câmera respectivamente, v é a velocidade de translação da base, na direção zb , θ̇b e θ̇p são as rotações da base e do pan-tilt nos eixos yb e yp , respectivamente. θp é o ângulo entre os eixos zt e zp e a altura de Fc em relação ao chão é h (Fig. 3). O problema de visão consiste em segmentar da imagem a reta correspondente ao rodapé esquerdo do corredor e calcular seus parâmetros ρ e θ em cada uma das imagens capturadas pela câmera. O problema de rastreamento de caracterı́sticas visuais envolve duas etapas: A configuração da base é do tipo synchro-drive. A velocidade lateral é nula, caracterizando a restrição não-holonômica do sistema. A torre possui uma rotação independente da base, embora neste trabalho consideramos ambos os corpos rigidamente ligados. O eixo de rotação do pan-tilt está deslocado do eixo de rotação da base de uma distância dp e o plano imagem da câmera está distante dc em relação à yp . Detecção das Caracterı́sticas A segmentação subdivide a imagem em seus objetos constituintes até que os objetos de interesse estejam isolados. As duas propriedades mais usadas são a similaridade (da intensidade de pixels) onde algoritmos de crescimento, divisão e fusão de regiões são usados, e a descontinuidade (variação brusca da intensidade) usada na detecção de linhas e bordas. · θp Fp yp xp Ft yc zp zc Fc dc yt xt xc zt h θp · dp θb cements F · PSfrag replacements Fb x b yb zb v Rastreamento Dependendo das caracterı́sticas usadas, a carga computacional necessária para segmentar e calcular os parâmetros impede o uso deste esquema dentro do laço de controle. Uma estratégia muito usada, conhecida como segmentação em quadro-completo e rastreamento em região-de-interesse, baseia-se no fato de que as caracterı́sticas geralmente ocupam apenas uma fração do espaço total na imagem. Inicialmente com o robô parado, a posição das caracterı́sticas na imagem são determinadas e uma região ou janela em torno de cada uma delas determinará a partir de então a região onde os filtros serão aplicados. A atualização da janela é feito considerando-se um movimento lento, usando a posição atual da caracterı́stica como valor da janela futura. Uma outra alternativa em desenvolvimento é através de um estimador como filtro de Kalman. Figura 3: O robô Nomad 200 e seus sistema de coordenadas associados. São apresentados a seguir o Jacobiano do robô para os casos considerando e desconsiderando o movimento do pan para a plataforma robótica móvel. 3.4 Controle Servo Visual sem movimento de pan Considerando o caso bidimensional, Tc = vx vz ωy sendo obtido pela equação (15), o controle é dado pela equação (16) onde: T u = v θ̇b (17) 0 dp + dc 0 J r = 1 (18) 0 1 (a) Imagem inicial. (b) Quadro completo. (c) Janela de interesse em torno da reta. 3.5 Controle Servo Visual com Movimento de pan Figura 4: Processamento de imagem. T e, Neste caso as entradas de controle são u = v θ̇b θ̇p como demonstrado em (Silveira et al., 2001) o Jacobiano é igual a: − sin θp +dp cos θp + dc dc dp sin θp 0 (19) Jr = cos θp 0 1 1 A solução encontrada para detectar o rodapé foi aplicar, na imagem de tons de cinza capturada pela câmera (Fig. 4(a)), um filtro de Canny (Fig. 4(b)) e em seguida uma transformada de Hough (retas sobrepostas na Fig. 4(b)) para determinar os parâmetros ρ e θ da reta. Partindo do pressuposto que o rodapé é o objeto que projeta na imagem a maior reta, o candidato de maior pontuação da transformada de Hough é aquela correspondente ao rodapé; tal suposição é razoável para a maioria dos casos, observou-se VI Simpósio Brasileiro de Automação Inteligente. Bauru, setembro de 2003 831 1 ρ 2dof (normalizado) ρ 3dof θ 2dof (rad) θ 3dof 0.8 0.6 0.4 0.2 Erro que, mesmo em casos extremos, quando o rodapé ocupa apenas uma pequena parcela da imagem, o algoritmo foi capaz de escolher corretamente. Outros fortes candidatos são as linhas geradas a partir das quinas das paredes e portas, neste caso, descartou-se os candidatos cuja inclinação encontrava-se entre 90 − e 90 + graus. Como a inclinação de tilt da câmera é zero, o processamento é realizado apenas na metade inferior da imagem e a janela de interesse em torno da reta foi de 30 pixels (Fig. 4(c)). 0 −0.2 5 RESULTADOS EXPERIMENTAIS −0.4 O Nomad têm seu movimento restrito ao plano horizontal, ou T seja T = R2 × SO(1), Tc = vx vz ωy e, neste caso a matriz de interação para retas determina uma ligação virtual de classe 1 do tipo prismático. Dada a tarefa de posicionar a câmera em relação a um corredor, simbolizado por uma reta extraı́da a partir do rodapé, a configuração desejada é dada por: −0.6 −0.8 −1 0 20 40 60 tempo (s) 80 100 120 (a) Variac¸a˜o do erro em ρ e θ para 2 g.d.l. e 3 g.d.l. • A câmera (Fc ) permanece a uma altura h do chão; • Fc permanece a uma distância d da parede; 1.5 2dof 3dof • O eixo z da câmera permanece paralelo à parede. 1 (20) o que fornece sd = −1 tan (−d/h) θd = 0 ρd (21) Rotação da base (graus/s) Nesta configuração, a equação da reta é y+h = 0 h(x, p) = x−d = 0 0.5 0 −0.5 −1 bT + = • A estimativa da matriz de interação é dada por L + LT (sd , zbd ), 1 0 0 • A matriz W é escolhida como sendo W = 0 0 1 −1.5 0 20 40 60 Tempo (s) 80 100 120 (b) Velocidade de rotac¸a˜o da base para 2 g.d.l. e 3 g.d.l. + • C = W LT |s=sd , Figura 5: Resultados Experimentais • hs = 21 (z(t) − z0 − V t)2 , ou seja • e2 = 0 z(t) − z0 − V t 0 o que conduz a 2 0 −V 0 • ∂e ∂t = REFERÊNCIAS A Fig. 5 compara a progressão do erro das caracterı́sticas visuais para os dois casos apresentados (Eq. (18) e (19)). Observa-se que a adição de um grau de liberdade melhora a convergência do parâmetro ρ causando um desacoplamento do erro em θ com o erro em ρ. Na Fig. 6 pode verificar-se o movimento da base compensando o movimento do pan-tilt mantendo a câmera alinhada ao corredor. 6 CONCLUSÕES O sistema mostrou-se robusto com o sistema convergindo mesmo para um tempo de iteração elevado (4 Hz) demonstrando que o visual-servoing pode ser aplicado mesmo em plataformas obsoletas (Pentium 133 Mhz). Caso taxas mais elevadas sejam necessárias (como no caso de um dirigı́vel robótico) deve-se usar um processador mais potente ou uma biblioteca otimizada de processamento de imagem, como o OpenCV da Intel. Bueno, S. S., Azinheira, J. R., Ramos, J. J. G., Paiva, E. C., Carvalho, J. R. H. and Silveira, G. F. (2002). Project aurora: Towards autonomous robotic airship, International Conference on Intelligent Robots and Systems. Chaumette, F., Rives, P. and Espiau, B. (1993). Classification and realization of the different vision-based tasks, in K. Hashimoto (ed.), Visual Servoing, Vol. 7, World Scientific Series in Robotics and Automated Systems, Singapore, pp. 199–228. Chen, K. H. and Tsai, W. H. (1997). Vision-based autonomous land vehicle guidance in outdoor environments using combined line and road following techniques, Journal of Robotic Systems 14(10): 711–728. Espiau, B., Chaumette, F. and Rives, P. (1992). A new approach to visual servoing, IEEE Transactions on Robotics and Automation 8(3): 313–326. VI Simpósio Brasileiro de Automação Inteligente. Bauru, setembro de 2003 832 Rotação da base e do pan (graus/s) 6 velocidade pan velocidade base 4 2 0 −2 −4 −6 −8 0 50 100 150 Tempo (s) Figura 6: Velocidade de rotação da base e do pan para 3 g.d.l. Samson, C., Borgne, M. L. and Espiau, B. (1991). Robot Control: The Task Function Approach, Oxford Engineering Science Series. Claderon Press. Silveira, G. F., Carvalho, J. R. H., Shiroma, P. M., Rives, P. and Bueno, S. S. (2001). Visual servo control of nonholonomic mobile robots, Proceedings of the 16th Brazilian Congress of Mechanical Engineering, Uberlândia/MG, Brasil, pp. 333–341. Silveira, G. F., Carvalho, J. R., Rives, P., Azinheira, J. R., Bueno, S. S. and Madrid, M. K. (2002). Optimal visual servoed guidance of outdoor autonomous robotic airships, Proceedings of the American Control Conference, USA, pp. 779– 784. VI Simpósio Brasileiro de Automação Inteligente. Bauru, setembro de 2003 833
Baixar