APRENDIZAGEM POR REFORÇO PARA TIMES DE ROBÔS
Carlos Henrique Costa Ribeiro – PQ
Lucas Heitzmann Gabrielli – IC
Resumo: Times de robôs autônomos podem propiciar uma forma mais eficiente de solução de tarefas
complexas através da sua divisão em subtarefas mais simples. Este artigo apresenta os resultados
obtidos com uma técnica de representação compacta (CMAC) para representação de estados e
aceleração de convergência de um algoritmo de aprendizagem por reforço para times de robôs em um
domínio simplificado de futebol de robôs. Para uma redução do espaço de estados de uma ordem de
magnitude, o algoritmo – através da generalização incorporada pela representação compacta –
conseguiu aprender uma política de ações adequada.
Abstract: Autonomous robots teams can provide a more efficient way of solving complex tasks through
simpler subtask splitting. This article presents results obtained with a compact representation
technique (CMAC - Cerebellar Model Articulation Controller) for state representation and
convergence acceleration of a robotic team reinforcement learning algorithm in a simplified robot
soccer domain. For a tenfold state space reduction, the algorithm – via generalization incorporated by
the compact representation – managed to learn an adequate action policy.
1. INTRODUÇÃO
Times de robôs têm se mostrado promissores em tarefas que envolvem um elevado grau de
complexidade caso sejam realizadas por um único agente. Nosso interesse é o estudo de estratégias de
controle obtidas de forma autônoma (ou seja, sem modelagem prévia da dinâmica do ambiente),
baseadas em aprendizado por reforço, para times de agentes robóticos atuando em conjunto.
Para tanto, escolhemos estudar o domínio do futebol de robôs, pois ele apresenta um alto grau
de complexidade e a possibilidade de ações coordenadas entre os agentes com ou sem a existência de
comunicação explícita. Mesmo nos casos mais simples este domínio envolve estratégias complexas e
espaços de estado de grandes dimensões, inviabilizando a utilização de representações tabulares sobre
as quais os algoritmos de aprendizado por reforço normalmente operam. Além disso, estes algoritmos
tem convergência notoriamente lenta, pois dependem de uma modelagem implícita do ambiente
(obtida de forma autônoma) a partir da qual as políticas de ações adequadas são obtidas.
De modo a acelerar a convergência e minimizar a dependência de uma representação tabular
completa – inviável em problemas envolvendo times de robôs nos quais uma discretização fina do
espaço de estados é necessária – propomos aqui o uso de uma representação tabular compacta aplicada
a um algoritmo de aprendizado por reforço específico para jogos envolvendo pelo menos dois agentes.
Os resultados obtidos mostram que, para uma redução do espaço de estados de uma ordem de
magnitude, o algoritmo, através da generalização incorporada pela representação compacta, conseguiu
aprender uma política de ações adequada.
2. APRENDIZAGEM POR REFORÇO
2.1 Princípios Básicos
A teoria de aprendizagem por reforço é teoricamente restrita a processos decisórios de
Markov, apesar de as idéias e métodos poderem ser aplicados de forma mais genérica.
Um ambiente satisfaz a propriedade de Markov se o seu estado resume o passado de forma
compacta, sem perder a habilidade de prever o futuro. Isto é, pode-se predizer qual será o próximo
estado e próxima recompensa esperada dado o estado e ação atuais (Sutton, R. S. e Barto, A. G.
(1998)). Um processo de Markov é uma seqüência de estados, com a propriedade de que qualquer
predição de valor de estado futuro dependerá apenas do estado e ação tuais, e não da seqüência de
estados passados.
Um processo de aprendizagem por reforço que satisfaz a propriedade de Markov é chamado
de processo decisório de Markov (MDP - Markov Decision Process). Se o espaço de estados e ações
for finito, então ele é chamado de processo decisório de Markov finito, base para a teoria de
aprendizagem por reforço, que assume o ambiente como sendo deste tipo.
Formalmente, um processo decisório de Markov é definido por um conjunto <S,A,P,R>, onde
temos: um conjunto finito de estados S do sistema, um conjunto finito de ações A, um modelo de
transição de estados P, que mapeia os pares estado-ação em uma distribuição de probabilidades sobre
o conjunto de estados, e, finalmente, uma função de recompensa R, que especifica o reforço que o
agente recebe por escolher uma determinada ação a ∈ A no estado s ∈ S . O estado s e a ação a atuais
determinam (a) o próximo estado s’ de acordo com a probabilidade P(s’|s,a), e (b) a recompensa r(s,a)
associada.
Se o modelo de transição de estados for conhecido, técnicas de Controle Ótimo podem – ao
menos em tese – ser utilizadas para determinar uma política ótima de ações a ser seguida pelo agente.
Alternativamente, aprendizagem por reforço é utilizada quando o modelo não está disponível
(aprendizagem autônoma) ou quando existe apenas um modelo de simulação, que não permite a
formulação analítica necessária para algoritmos de Programação Dinâmica.
Aprendizagem por reforço preocupa-se com o problema de um agente aprender, por tentativa
e erro, a atingir um objetivo interagindo com o seu ambiente. O agente e o ambiente interagem em
uma seqüência discreta de passos no tempo, t=0,1,2,.... O estado e a ação em um dado instante (st ∈ S
e at ∈ A), determinam a distribuição de probabilidades para o estado st+1 e o reforço rt. O objetivo do
agente normalmente é escolher ações de modo a maximizar uma soma descontada dos reforços
subseqüentes:
Rt =
T
∑ γ k rt + k
(1)
k =0
onde a taxa de desconto 0 < γ ≤ 1 determina o peso temporal relativo dos reforços. Existem
formulações alternativas para esta função de otimização (Sutton, R. S. e Barto, A. G. (1998)).
As escolhas das ações do agente são feitas a partir de uma função do estado, chamada política,
π:S→A. O valor de utilidade de um estado, dada uma política, é o reforço esperado partindo do estado
e seguindo a política:
V π ( s ) = E π {Rt s t = s}
(2)
e a política ótima de ações é aquela que maximiza o valor de estado:
V * ( s ) = max π V π ( s )
(3)
Existe sempre ao menos uma política ótima π*, que produz o valor de utilidade máximo em
todos os estados s ∈ S.
Paralelamente a essas duas funções de valor de estado, existem duas funções de valor de ação,
Q π ( s, a) = Eπ {Rt st = s, at = a}
π
Q * ( s, a ) = max π Q ( s, a )
(4)
(5)
A partir de Q*, pode-se determinar uma política ótima apenas como π*(s) = arg maxa Q(s, a).
O método de aprendizagem por reforço mais popular é o Q-learning (Watkins, C. J. C. and
Dayan, P. (1992)). Trata-se de um algoritmo que permite estabelecer autonomamente uma política de
ações de maneira interativa. Pode-se demonstrar que o algoritmo Q-learning converge para um
procedimento de controle ótimo, quando a hipótese de aprendizagem de pares estado-ação Q for
representada por uma tabela completa contendo a informação de valor de cada par. A convergência
ocorre tanto em processos decisórios de Markov determinísticos quanto não-determinísticos.
A idéia básica por trás do Q-learning é que o algoritmo de aprendizagem aprende uma função
de avaliação ótima sobre todo o espaço de pares estado-ação S×A. A função Q fornece um
mapeamento da forma Q:S×A→V, onde V é o valor de utilidade esperado ao se executar uma ação a
no estado s. Desde que o particionamento do espaço de estados do robô e o particionamento do espaço
de ações não omitam informações relevantes nem introduzam novas, uma vez que a função ótima Q
seja aprendida o agente saberá precisamente que ação resultará na maior recompensa futura em uma
situação particular s.
A função Q(s,a), da recompensa futura esperada ao se escolher a ação a no estado s, é
aprendida através de tentativa e erro segundo a equação a seguir:
Qt +1 ( s t , a t ) = Qt ( s t , a t ) + α[rt + γVt ( s t +1 ) − Qt ( s t , a t )]
(6)
onde α é a taxa de aprendizagem, r é a recompensa, ou custo, resultante de tomar a ação a no estado s,
γ é o fator de desconto e o termo Vt(st+1) = maxaQ(st+1,a) é a utilidade do estado s resultante da ação a,
obtida utilizando a função Q que foi aprendida até o presente.
A função Q representa a recompensa descontada esperada ao se tomar uma ação a quando
visitando o estado s, e seguindo-se uma política ótima desde então.
A forma procedimental do algoritmo Q-learning é:
Para cada s,a inicialize Q(s,a)=0
Observe s
Repita
• Selecione ação a usando a política de ações atual
• Execute a ação a
• Receba a recompensa imediata r(s,a)
• Observe o novo estado s’
• Atualize o item Q(s,a) de acordo com a equação (6)
• s ← s'
Até que critério de parada seja satisfeito
Uma vez que todos os pares estado-ação tenham sido visitados um número infinito de vezes,
garante-se que o método gerará estimativas Qt que convergem para o valor de Q (Watkins, C. J. C. and
Dayan, P. (1992)). Na prática, a política de ações converge para a política ótima em tempo finito,
embora de forma lenta.
2.2 Jogos de Markov
Considere n agentes interagindo com um ambiente através de percepções e ações. Em cada
interação, o agente i observa o estado st e escolhe uma ação ai a executar. O conjunto de ações a1, ...,
an altera o estado st do ambiente, e um reforço escalar ri é produzido para cada agente, indicando e
desejabilidade do estado resultante.
Formalmente, um jogo de Markov é definido por um conjunto 〈n,S,A1, ..., An, r1, ..., rn, P〉,
onde temos: um número n de agentes, um conjunto finito de estados S do sistema, conjuntos finito de
ações Ai para cada agente i, reforços ri recebidos por cada agente, e um modelo de transição de
estados P, que mapeia as n-uplas (s, a1, a2, ..., an) em uma distribuição de probabilidades sobre o
conjunto de estados.
2.3 Algoritmo Minimax-Q
O algoritmo Minimax-Q (Littman, M., (1994)) é uma generalização de Q-learning para um
caso particular dos jogos de Markov, para casos de dois agentes executando ações em passos
alternados, em um jogo de soma zero.
Sejam A e B os jogadores envolvidos. O objetivo de A é aprender uma política ótima de ações
que maximize o valor esperado descontado de reforços. O aprendizado desta política é em geral muito
difícil, pois depende das ações executadas pelo adversário. Uma solução para este problema é avaliar
cada política com relação à estratégia do adversário que a torna pior, no espírito da técnica Minimax
frequentemente utilizada em jogos modelados. Para políticas de ação determinísticas, o valor ótimo de
um estado s em um jogo de Markov é:
V * ( s ) = max π min b Q( s, a, b)
(7)
e a regra de atualização Minimax-Q é:
∆Qt ( s t , a t , bt ) = α[rt + γVt ( s t +1 ) − Qt ( s t , a t , bt )]
(8)
onde ∆Qt(st, at, bt) = Qt+1(st, at, bt) – Qt(st, at, bt) α é a taxa de aprendizagem, r é a recompensa, ou
custo, resultante de A tomar a ação a e B tomar a ação b no estado s, γ é o fator de desconto.
3. REPRESENTAÇÃO CMAC
O princípio do CMAC (Albus, J. (1975)) é realizar várias discretizações independentes do
ambiente (tilings) e mapeá-las aleatoriamente em um único vetor unidimensional de dimensão bem
inferior ao espaço de estados original, definindo desta forma uma representação compacta sobre a qual
o algoritmo de aprendizado operará.
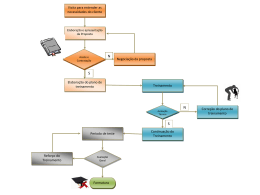
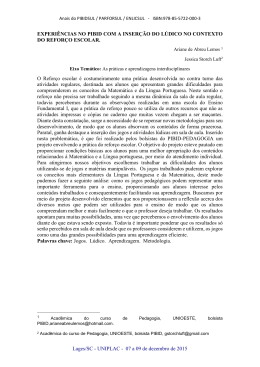
Associamos a cada membro do vetor unidimensional um conjunto de posições (discretas) de
cada tiling aleatoriamente, de forma que, a cada ponto do ambiente, corresponde uma posição de cada
tiling e, portanto, um conjunto de valores do vetor unidimensional (figura 1). O valor então associado
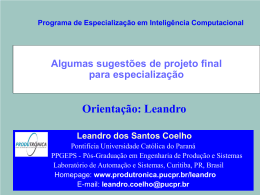
a cada ponto (ou seja, Q(s,a,b)) é calculado como a média dos valores do vetor que representam tal
ponto, e a atualização (8) é feita em todos esses membros do vetor (figura 2).
Desse modo, com a escolha adequada do número de tilings, refinamento de cada um e
tamanho do vetor unidimensional, podemos ver que a aprendizagem pode ser acelerada, pois ocorrerá
tanto no ponto escolhido como na sua vizinhança, já que pontos próximos acabarão tendo
representação mais semelhante no vetor unidimensional e pontos mais distantes, terão menor
semelhança. Além disso, sobrepondo-se os vários tilings, obtemos um ambiente mais refinado que o
inicialmente utilizado.
A
B
C
B
A
A
B
C
C
C
A
Figura 1 – Associações das partições dos tilings com o vetor
unidimensional. No caso, o vetor (à esquerda) possui dimensão
6, enquanto cada um dos 3 tilings (à direita) tem dimensão 12,
obrigando-nos a associar dois estados de cada tiling a cada
membro do vetor (mesma cor)
B
Figura 2 – Correspondência de alguns pontos com os membros
do vetor. O ambiente está representado como superposição dos
tilings, mostrando-se mais refinado. Cada uma das 3 alocações
de valores do vetor à direita representa um dos 3 pontos.
Observamos que pontos próximos têm maior semelhança de
representação, enquanto pontos mais distantes são representados
com menos membros em comum.
4. ARRANJO EXPERIMENTAL E RESULTADOS
Para a obtenção dos resultados foi utilizado um simulador escrito em Java chamado TeamBots
(http://www.teambots.org) por sua facilidade de uso e recursos apresentados. Ele propicia a criação do
sistema de controle do agente e uma grande variedade de ambientes. Especificamente para o domínio
do futebol de robôs, é possível determinar o número de jogadores de cada time (no nosso caso, apenas
dois jogadores) e selecionar o sistema de controle de cada agente independentemente.
O campo foi particionado como uma grade de 20 células (5 x 4) e os movimentos dos
jogadores foram limitados a apenas 9: frente (norte), trás (sul), laterais (esquerda, direita), diagonais
(nordeste, sudeste, sudoeste, noroeste) e permanecer parado. Sempre que o jogador estiver na mesma
casa que a bola, ele automaticamente se posiciona de forma a chutar a bola em direção ao gol
adversário, caso contrário, ele fica no centro da casa. O jogador chuta a bola apenas quando estiver
corretamente posicionado e selecionar a ação de permanecer parado.
Considerando que os resultados envolvem apenas dois jogadores (um jogador A e seu
adversário B), o número de estados é definido pela multiplicação dos seguintes valores: número de
possíveis posições para A, para B e para a bola e número de possíveis movimentos para A e para B, o
que resulta em um total de 20 x 20 x 20 x 9 x 9 = 648.000 estados. O vetor unidimensional utilizado
para a codificação CMAC é de 65.000 posições, representando uma redução de aproximadamente 10
vezes. Note que a generalização é uma consequência direta da representação compacta CMAC.
Os parâmetros utilizados para o algoritmo Minimax-Q foram γ = 0.9 e α = 1.0, decaindo
linearmente a 0.0 ao final de 150 jogos. Cada jogo corresponde a uma partida de aproximadamente 1
minuto de duração.
4
4
3.5
3.5
3
3
2.5
2.5
2
2
1.5
1.5
1
1
0.5
0.5
0
0
1
11
21 31
41
51
61
71
81
91 101 111 121 131 141
1
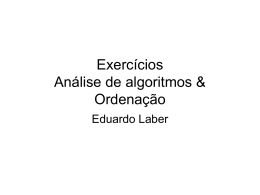
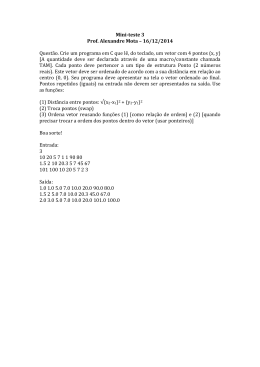
Gráfico 1 – Curva de aprendizagem média, 8 tilings, oponente
aleatório.
11
21 31
41
51
61
71
81
91 101 111 121 131 141
Gráfico 3 – Curva de aprendizagem média, 12 tilings, oponente
aleatório.
4
3.5
3.5
3
3
2.5
2.5
2
2
1.5
1.5
1
1
0.5
0.5
0
0
1
11
21 31
41
51
61
71
81
91 101 111 121 131 141
1
Gráfico 2 – Curva de aprendizagem média, 10 tilings, oponente
aleatório.
11
21 31
41
51
61
71
81
91 101 111 121 131 141
Gráfico 4 – Curva de aprendizagem média, 8 tilings, oponente
autônomo.
3
2.5
2
1.5
1
0.5
0
1
11
21 31
41
51
61
71
81
91 101 111 121 131 141
Gráfico 5 – Curva de aprendizagem média, 10 tilings, oponente
autônomo.
Os gráficos 1 a 5 mostram os resultados obtidos (curvas de aprendizagem média sobre 40
conjuntos de 150 jogos em cada caso) com o uso do algoritmo Minimax-Q para codificações CMAC
sobre a grade de 20 partições, para 8, 10 e 12 tilings retangulares, definidos sobre a grade original e
arranjados com deslocamento uniforme sobre esta última. O eixo x indica o jogo realizado, e o eixo y
indica o saldo de gols obtido. A linha contínua mais escura é uma interpolação logaritmica das curvas
obtidas, para uma indicação mais clara da tendência observada ao longo do processo de aprendizagem,
com excessão do gráfico 5 (interpolação polinomial). O jogador B executa uma política aleatória de
ações nos 3 primeiros gráficos e o algoritmo CMAC com representação tabular completa nos demais.
Nota-se que nos 3 primeiros casos ocorreu aprendizagem rápida de uma política de ações
vitoriosa, com uma tendência de aumento do saldo de gols permanecendo ao final dos 150 jogos. A
convergência mais rápida ocorreu para 8 tilings, o que indica que um grau maior de generalização
(menos tilings) mostrou-se conveniente neste problema.
Contra o adversário autônomo observam-se dois comportamentos bastante distintos. No
primeiro caso (gráfico 4) o agente demora um pouco mais para obter uma grade vantagem de gols,
mas consegue mantê-la com o passar do tempo, quando o oponente também vai aprendedo. Já no
segundo caso (gráfico 5) o jogador consegue uma política muito boa rapidamente, mas que não leva a
uma generalização satisfatória conforme o adversário se desenvolve. Deve-se optar então entre a
rapidez do aprendizado ou a robustez da política de ações obtida.
5. CONCLUSÕES
Os resultados mostram que a utilização de representações compactas do tipo CMAC, aliadas
ao uso de um algoritmo de aprendizagem por reforço pode produzir convergência rápida em
problemas envolvendo times de robôs atuando em domínios não-modelados previamente.
Como trabalhos futuros, indica-se a avaliação de desempenho para um aumento da dimensão
do espaço de estados, através da inclusão de mais jogadores, e uma comparação do método CMAC
com outras técnicas de generalizações, sejam basedas em representações compactas (Tsitsiklis, J. e
Bertsekas, D. (1996)) ou não, tais como aquelas discutidas e avaliadas em (Ribeiro, C., Pegoraro, R. e
Reali Costa, A. (2002)).
AGRADECIMENTOS
Autor e coordenador agradecem o apoio financeiro do CNPq através do Programa
Institucional de Bolsas de Iniciação Científica – PIBIC.
REFERÊNCIAS BIBLIOGRÁFICAS
1. Albus, J.; A New Approach to Manipulator Control: The Cerebellar Model Articulation
Controller (CMAC); Journal of Dynamic Systems, Measurement and Control. American Soc.
of Mechanical Engineers, 1975.
2. Littman, M.; Markov games as a framework for multi-agent reinforcement learning;
Proceedings of the Eleventh International Conference on Machine Learning, San Francisco,
CA. Morgan Kaufmann, 1994; p. 157.
3. Ribeiro, C., Pegoraro, R. and Reali Costa, A.; Experience Generalization for Concurrent
Reinforcement Learners: the Minimax-QS Algorithm; Procs. of the First Int. Joint Conf. on
Autonomous Agents and Multiagent Systems - AAMAS2002, Bologna, ACM Press, 2002; v.
3, p. 1239.
4. Sutton, R. S. e Barto, A. G.; Reinforcement Learning: An Introduction; Massachusetts: MIT
Press, 1998.
5. Watkins, C. J. C. H. e Dayan, P.; Q-learning; Machine Learning, 1992; n. 8, 279.
6. Tsitsiklis, J. e Bertsekas, D. (1996). Neuro-Dynamic Programming. Athena Scientific, 1996.
7. Ribeiro, C., Reali Costa, A. and Romero, R.; Robôs Móveis Inteligentes: Princípios e Técnica;
A.T. Martins e D.L. Borges, editors, Anais do XXI Congresso da Sociedade Brasileira de
Computação, 2001; vol. 3, p. 257.
8. Ribeiro, C.; A Tutorial on Reinforcement Learning Techniques, in A. P. Braga, editor, CDROM textbook version of the Supervised Learning track tutorials of the 1999 International
Joint Conference on Neural Networks, INNS Press, Washington DC, July 1999.
Download