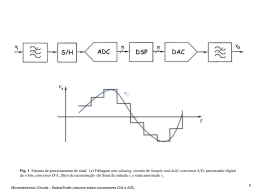
Técnicas de Modelagem e Controle de Conversores Estáticos Prof.: Seleme I. Seleme Jr DELT - UFMG 12 a 15/10 de 2004 IV INDUSCON – Joinville - SC Esboço do Curso Objetivos do Mini-Curso Obtenção de modelos via Average Switching Modelling – ASM Técnicas de Controle Obtenção dos modelos em Espaço de Estado Considerações sobre os Modelos Controle Clássico Controle Avançado Conclusões Objetivos do Mini-Curso Apresentação de metodologia de modelagem de conversores. Obtenção e análise de alguns modelos em Espaço de Estado. Apresentação de panorâmica de técnicas de controle de conversores. Apresentação de metodologia de projeto de controladores de conversores. Obtenção de Modelos via Average Switching Modelling Introdução Eliminação de ripple de chaveamento Supressão de harmônicos O modelo CA do conversor no Espaço de Estados O modelo vis-à-vis ao controle Representação matemática dos fenômenos físicos Modelo simplificado ou “a dinâmica que interessa” Insight: “quando, onde e porque” Exemplos Introdução Objetivos dos modelos (Definição de modelo CA) A inclusão da dinâmica dominante Simplicidade, aproximação e precisão Modelo orientado ao controle O que é o Modelo CA ? Aquele que prediz como variações de baixa freqüência na Razão Cíclica afetam a saída (variável a ser controlada). Aquele que ignora ripple de chaveamento Aquele que ignora harmônicos de chaveamento e suas dinâmicas (quando isto não afeta a sua precisão). O ripple de chaveamento Espectro da Tensão de Saída com Modulação Senoidal da Razão Cíclica Modelos CC (Steady-state) e modelo CA Conversor Buck e Filtro LC Tensão de saída em função de D Ripple e Tensão CC Ripple e Tensão CA Média Conversor Buck-Boost Introdução A técnica de obtenção dos Modelos CA (Obtenção de modelos) Eliminação dos harmônicos de chaveamento através da utilização das formas de onda médias em um período de chaveamento (ASM). Utilização de modelos lineares (modelagem de pequenos sinais) das chaves estáticas operando em torno de um ponto quiescente. O Modelo CA e os objetivos do controle Controlar através da Razão Cíclica do conversor a forma de onda de tensão (corrente) de saída e/ou de entrada, seja ela CA ou CC, tal que ela siga a referência. Porque modelo médio (Averaged)? A representação média de circuito para um conversor chaveado é útil para a análise, simulação e para se ganhar experiência sobre a operação do conversor. É desejável que o circuito (médio) obtido seja o mais fiel possível do circuito chaveado que o gerou. Wester e Middlebrook foram pioneiros na utilização da técnica de síntese de circuitos que eles chamaram de in place ou ainda, de método direto de obtenção de circuito médio. Ainda mais interessante do que o modelo de circuito médio do conversor, é a sua descrição aproximada (pela média) no Espaço de Estados. Modelo baseado na média para evitar ripple de chaveamento A média num período Em regime permanente onde Obs.: as correntes e tensões médias são funções não lineares da Razão Cíclica Avereging e a eliminação do ripple A variação média da corrente do indutor (Buck – Boost) A variação média no capacitor (corrente e tensão) Exemplo de um conversor Buck CC-CC e seu regulador Considerações sobre o Modelo CA de um Conversor A Hipótese fundamental é de que a variação CA (de correntes e tensões) é muito menor do que os valores quiescentes. As Equações Diferenciais Não Lineares podem, portanto, ser linearizadas. A linearização é feita desprezando-se os termos de segunda ordem e removendo a componente CC (que soma zero). O resultado é um modelo linear que descreve a variação CA de pequenos sinais. Ponto quiescente, linearização e pequenos sinais Conversor Buck-Boost Linearização em torno do ponto quiescente Eqs. Diferenciais da média (não lineares) Ponto quiescente e perturbação Modelo linearizado de pequenos sinais (Buck-Boost) Equação de Perturbação do Indutor Desenvolvendo a expressão: Linearizando: Modelo linearizado de pequenos sinais (Buck-Boost) Equação de Perturbação do Capacitor Desenvolvendo a expressão: Linearizando: Não Linearidades do dispositivo e de harmônicos 1. Exemplo de dispositivo não linear (BJT): Modelo não linear Modelo linearizado 2. Não linearidades advindas de harmônicos: Os harmônicos presentes no conversor são responsáveis pelos termos ≥ 2a. ordem, que aparecem no modelo completo. O modelo médio no Espaço de Estados Modelo formal, orientado a aplicações em controle. Procedimento generalizado na obtenção dos modelos descritos por Equações Diferenciais Lineares Matriciais. Os modelos de pequenos sinais pela média são sempre possíveis desde que se disponha das Eqs. de Estado do conversor original. Descrição de Sistemas no Espaço de Estados Descrição canônica de sistemas dinâmicos por Sistemas de Equações Diferenciais de primeira ordem. Em sistemas lineares, as derivadas das variáveis de estado podem ser expressas com combinação linear dos estados e das entradas. As variáveis de estado são tipicamente de elementos armazenadores de energia: corrente em indutor tensão em capacitor, posição e velocidade de elementos móveis, etc. Equações de Estado Matriciais de um Sistema Linear Forma canônica matricial (sistema linear invariante no tempo) u(t) – variáveis de entrada (fontes independentes de tensão) x(t) – variáveis de estado Y(t) – variáveis de saída (variáveis a serem medidas e controladas) K – matriz contendo tipicamente valores de capacitância, indutância própria e mútua A, B, C e E – matrizes de constantes de proporcionalidade Exemplo com circuito elétrico Descrição do sistema: Variáveis de Estado Matriz K Vetor de entrada Variáveis de saída desejadas Exemplo (Eqs. do circuito) Obter iC1 via equação nodal: Obter iC2 via equação nodal: Obter iC3 via equação de malha: Exemplo (na forma matricial) As mesmas equações: Expressas na forma matricial: Exemplo (variáveis de saída) Expresse os elementos do vetor de saída y como combinação linear de x e u Em forma matricial: Como Eqs. isoladas: Modelo de Estados pela média (averaged) Considere-se que o conversor esteja em condução contínua, alimentado via Modulação de Largura de Pulsos (PWM) Existem dois estados e subintervalos associados ao conversor em cada intervalo de chaveamento. Em cada subintervalo o conversor tem um comportamento contínuo, correspondente ao circuito elétrico que o representa e passível de descrição por Equações de Estado. As Equações de Estado são lineares por se tratar de modelo linearizado de pequenos sinais. As Equações de Estado pela Média (Averaged) são obtidas pela média das Matrizes de Estado dos 2 subintervalos. Equações de Estado pela Média - Hipóteses Durante subintervalo 1 As chaves estão em posição 1 e o conversor se reduz a um circuito passível de ser descrito por Eqs. de Estado Lineares: Durante subintervalo 2 As chaves estão em posição 2 e o conversor se reduz a um circuito passível de ser descrito por Eqs. de Estado Lineares: Equações de Estado pela Média - Modelo CC SISTEMA EM EQUILÍBRIO (modelo CC) : Na hipótese das freqüências naturais do conversor e das constantes de tempo das suas variáveis de entrada serem bem menores do que a freqüência de chaveamento, o modelo médio do conversor em equilíbrio pode ser descrito por: As matrizes médias são dadas como: Os componentes (CC) em equilíbrio são: Vetor de estado (CC) Vetor de Entrada (CC) Vetor de Saída (CC) Razão Cíclica (CC) Equações de Estado pela Média - A solução média do sistema em equilíbrio A SOLUÇÃO DO SISTEMA EM EQUILÍBRIO: Tendo em vista as equações médias do sistema linear em equilíbrio, sua solução é: A solução para X e Y : Equações de Estado pela Média - Modelo CA de pequenos sinais (1) Algumas definições e explicações: Note-se que: Equações de Estado pela Média - Modelo CA de pequenos sinais (2) Dedução Usando-se as definições apresentadas e os sistemas de equação que representam o sistema dos dois subintervalos, obtém-se: Equações de Estado pela Média - Modelo CA de pequenos sinais (3) Dedução (cont.) - 1a. ordem CA termos CC termos CA de 1a. ordem termos não lineares de 2a. ordem CC + 1a. ordem termos CC termos CA de 1a. ordem termos não lineares de 2a. ordem Equações de Estado pela Média - Modelo CA de pequenos sinais (4) Sempre que for possível descrever os circuitos do conversor nos dois subintervalos, é possível obter o modelo CA médio de pequenos sinais, que é um modelo aproximado, desprezando-se os termos de 2a. ordem. onde: perturbação de pequeno sinal (CA) no vetor de estado perturbação de pequeno sinal (CA) no vetor de entrada perturbação de pequeno sinal (CA) no vetor de saída perturbação de pequeno sinal (CA) na razão cíclica Equações de Estado pela Média - Modelo CA de pequenos sinais (5) Sendo que a matriz K é não singular e inversível, pode-se escrever as Equações de Estado na sua forma mais usual: Componentes de baixa freqüência das variáveis de estado e de saída (interpretação gráfica) Variáveis de estado Variáveis de saída Equações de Estado pela Média - Exemplo com Buck-Boost não ideal (1) Não idealidades do modelo: • Ron – resistência do MOSFET conduzindo • VD – queda de tensão no diodo com polarização direta Vetor de Estados Vetor de entrada Vetor de saída Equações de Estado pela Média - Exemplo com Buck-Boost não ideal (2) Subintervalo 1 (DTs) Equações de Estado pela Média - Exemplo com Buck-Boost não ideal (3) Subintervalo 2 (D’ Ts) Equações de Estado pela Média - Exemplo com Buck-Boost não ideal (4) As matrizes médias de maneira similar: Equações de Estado pela Média - Exemplo com Buck-Boost não ideal (5) As Eqs. de Estado CC A solução CC Exemplo com Buck-Boost não ideal (6) - O circuito equivalente CC Eqs. de Estado CC : Circuito equivalente correspondente: Exemplo com Buck-Boost não ideal (7) - O circuito equivalente CA de pequenos sinais Cálculo das matrizes no modelo de pequenos sinais: Eqs. de Estado CA de pequenos sinais: Modelagem do Modulador de Largura de Pulso (PWM) – 1 – Os moduladores PWM convertem o sinal de referência de tensão, vc(t), na Razão Cíclica d(t). Modelagem do Modulador de Largura de Pulso (PWM) – 2 – A Razão Cíclica é obtida pela comparação entre a onda dente de serra com a forma de onde analógica vc(t) que se deseja sintetizar. Modelagem do Modulador de Largura de Pulso (PWM) – 3 – Os moduladores PWM também introduzem amostragem da forma de onda, embora a referência de tensão, vc(t), seja contínua no tempo. Existe apenas um valor discreto da Razão Cíclica para cada período de chaveamento. O PWM amostra a forma de onda de tensão com a freqüência de chaveamento. Modelagem do Modulador de Largura de Pulso (PWM) – 4 – Alguns cuidados devem ser tomados com relação ao PWM: Garantir que a banda passante do controlador seja suficientemente menor do que a freqüência de Nyquist que é fS / 2 . Evitar que a tensão de referência, vs(t), contenha componentes harmônicos em torno da freqüência de chaveamento ou maiores. Tais componentes harmônicos podem ser introduzidos via realimentação. Variações de alta freqüência em vs(t) podem alterar o comportamento do PWM, de várias maneiras: Aparecimento de off-set CC na tensão de saída (em inversores); Flutuação do tempo de chaveamento com propagação de ruído; O Fenômeno de aliasing; Geração de harmônicos indesejáveis; Ocorrem comportamentos não-lineares não previstos pelo modelo de pequenos sinais. Modelagem no Espaço de Estado quando de elementos (exceto chaves) não lineares Veremos em seguida, um método alternativo para contemplar não linearidades no circuito como elementos resistivos não lineares e elementos capacitivos e reativos não lineares. Tais não linearidades ocorrem com capacitores chaveados, resistores não lineares para descrever conversores operando em modo descontínuo, etc. Modelagem no Espaço de Estado (Alternativa) 1 Sistema Linear d x A0 x B0 w para u 0 dt d x A1 x B1w para u 1 dt onde u é o statusda chave (u 1 - chavefechada, u 0 - chaveaberta) d x A0 u ( A1 A0 )x B0 u ( B1 B0 )w dt Sistema não linear d x f 0 ( x, w) u f1 ( x, w) f 0 ( x, w) dt (formabilinear) Modelagem no Espaço de Estado (Alternativa) 2 Valores médios 1 x T t x(s) ds t T 1 d (t ) u T t u(s) ds t T Caso linear : d d x x A0 u ( A1 A0 ) x B0 u ( B1 B0 ) w dt dt Caso não linear : d d x x f 0 ( x, w) u f1 ( x, w) f 0 ( x, w) f 0 ( x , w ) d f1 ( x , w ) f 0 ( x , w ) dt dt Modelagem no Espaço de Estado (Alternativa) 3 Sendo : d x f 0 ( x0 , w ) ( D dˆ ) f1 ( x , w ) f 0 ( x , w ) , com d D dˆ dt linearizando f 0 e f1 em torno de X e W : f 0 A0 xˆ B0 wˆ f 0 X ,W , f1 A1xˆ B1wˆ f1 X ,W com A A1D A0 D onde : A0 B0 obtém - se : f 0 ( x , w ) x X ; A1 f1 ( x , w ) x X ; xˆ x X x x f 0 ( x , w ) w W ; B1 f1 ( x , w ) w W ; wˆ w W w w d x Axˆ Bwˆ dˆ f1 ( X ,W ) f 0 ( X ,W ) dˆ A1 A0 xˆ B1 B0 wˆ dt Modelagem no Espaço de Estado (Alternativa) 4 Caso linearizado : d x Axˆ Bwˆ dˆ f1 ( X ,W ) f 0 ( X ,W ) dˆ A1 A0 xˆ B1 B0 wˆ dt rmo de 2a. ordem te onde : X ,W - caracteriz am o estado do ponto de operação quiescente xˆ , wˆ e dˆ - caracteriz am variações de pequenos sinais nos estados e na Razão Cíclica Caso do sistema linear : f 0 A0 x B0 w e f1 A1 x B1 w d x Axˆ Bwˆ dˆ A1 A0 X B1 B0 W dˆ A1 A0 xˆ B1 B0 wˆ dt termode 2a. ordem Averaging Generalizado 1 (Aplicação a conversores ressonantes) Metodologia para a modelagem pela média de circuitos chaveados, generalizada, com precisão estendida de maneira arbitrária a ordens mais elevadas da série de Fourier. Método baseado na aproximação de x(n) no intervalo (t-T, t), com precisão arbitrária: onde k designa a ordem dos elementos na série de Fourier, s 2 / T , é a freqüência de chaveamento, s (0, T ] , é a variável de tempo no interior do intervalo. Os coeficientes da série são dados por: Averaging Generalizado 2 No caso das técnicas estudas até aqui, nós nos contentamos com usarmos a média da ciclo inteiro T : que corresponde ao coeficiente CC da série de Fourier do slide precedente: Esta aproximação, embora válida para conversores modulados com PWM a alta freqüência, não é muito boa para conversores que tenham alguns de seus estados exibindo comportamento oscilatório, como é o caso dos Conversores Ressonantes. Averaging Generalizado 3 Propriedade importante do coeficiente da série de Fourier: Seja o modelo de um circuito chaveado: onde u(t) é uma função periódica no tempo com período T. O modelo médio generalizado para o sistema acima fica: ou seja Averaging Generalizado 4 Em resumo, o sistema: é aproximado com precisão arbitrária pela inclusão de termos: onde a função Funções de Descrição. pode ser aproximada usando-se i) Para o caso de conversores ressonantes, com freqüência fundamental predominante, basta computar os índices k= 0, + 1 e – 1, da série de Fourier. ii) Para os PWM com chaveamento rápido, basta o índice CC (zero). Modelagem de um Conversor Ressonante (Exemplo de aplicação) 1 Considere o conversor ressonante série com fonte de tensão: f r 36 kHz (freq.ressonância) f s 38 40 kHz (freq.da fonte) O modelo em Espaço de Estados para este conversor tem a forma: (ondesgn () é a funçãosinal) Modelagem de um Conversor Ressonante (Exemplo de aplicação) 2 O conversor opera em modo contínuo (fs > fr) 1 36 kHz LC Considere o modelo obtido com, apenas (freq.ressonância) fr f s 38 40kHz (freq.da fonte) os seguintes coeficientes da série de Fourier: i 1 , i 1 , v 1 e v 1 O modelo em Espaço de Estados tem, então, a seguinte forma: Modelagem de um Conversor Ressonante (Exemplo de aplicação) 3 O modelo para a componente fundamental resulta de 4a. ordem (duas equações para +1 e duas para –1) Sabendo-se que: O modelo em Espaço de Estados tem, então, a seguinte forma: s e Vs podem ser consideradas como entradas externas a este modelo. Modelagem de um Conversor Ressonante (Exemplo de aplicação) 4 Note que Comparação entre as forma de onda de corrente e tensão e as componentes de ordem 1: são as envoltórias de i(t) e v(t) , pelo modelo apresentado. Modelagem de um Conversor Ressonante (Exemplo de aplicação) 5 Seja o conversor ressonante série mais realista da figura: As Equações diferenciais que descrevem A dinâmica do conversor: (ondesgn () é a funçãosinal) Fazendo-se a aproximação pelos harmônicos fundamentais de primeira ordem: Modelagem de um Conversor Ressonante (Exemplo de aplicação) 6 Os termos não lineares das Equações Diferenciais anteriores ficam: As Equações Diferenciais de primeira harmônica ficam: Modelagem de um Conversor Ressonante (Exemplo de aplicação) 7 Solução em Regime Permanente componentes harmônicos da corrente módulo da corrente freqüência de operação tensão no capacitor do filtro componentes harmônicos da tensão Os termos maiúsculos denotam operação em Regime Permanente Modelagem de um Inversor Trifásico (Exemplo de aplicação) Os inversores são conversores CC-CA com Modulação de largura de Pulso. Eles são largamente utilizados em aplicações de acionamento CA e em fontes ininterruptas de potência (UPS). Métodos de Averaging são empregados para a obtenção de modelos em tempo contínuo. A diferença fundamental no caso de inversores (com relação aos conversores CC-CC) é que se deseja uma tensão de saída senoidal. Veja a seguir, um sumário da modelagem de inversores trifásicos. Modelagem de um Inversor Trifásico 1 O conceito do chaveamento PWM Circuitos de chaveamento Qdo Vsin>Vtri a chave fecha Qdo Vsin>Vtri a chave abre Modelagem de um Inversor Trifásico 2 Componente fundamental PWM trifásico harmônicos Modelagem de um Inversor Trifásico 3 O inversor trifásico 2 As equações 2 2 S1* , S2* e S3* são as funções de chaveamento relativas às fases A, B e C Modelagem de um Inversor Trifásico 4 As funçõesde chaveamento S1* , S2* e S3* são variáveisdiscretas. Elas podemser aproximadas por seus valoresmédios no tempo: - razão de modulação - defasagem angular • Observe que, na Equação acima, está representada apenas a componente fundamental da tensão média equivalente. • Neste caso, as funções de chaveamento podem ser encaradas como tensões de entrada. Modelagem de um Inversor Trifásico 5 As Eqs. do sistema trifásico no Espaço de Estados Variáveis de Estado Variáveis de Entrada Modelagem de um Inversor Trifásico 6 O processode Averagingtransforma as variáveisdiscretas de chaveamento, Si* , em sinais de modulaçãocontínuos, u. Variáveis de Estado Variáveis de Entrada contínuas, obtidas pelo valor médio das funções de chaveamento Si*. Modelagem de um Inversor Trifásico 7 A transformação trifásico – bifásica Variáveis no sistema de coordenadas dq0 Matrizes de transformação Modelagem de um Inversor Trifásico 8 As Eqs. de Estado no referencial girante dq0 As Equações de Estado A Matriz de Estado As variáveis de estado As variáveis de entrada Modelagem de um Inversor Trifásico 9 As Eqs. de Estado em dq0 para o sistema equilibrado • d e q indicam componentes de eixo direto e em quadratura e 0 indica as componentes de seqüência zero do sistema. • para o sistema equilibrado, as componentes de seqüência zero são desacopladas do resto do sistema e podem ser removidas. • com isto, obtém-se um sistema de ordem reduzida (6a. ordem) invariante no tempo. O modelo vis-a-vis do controle – 1 – - Comentários Para o controle, o modelo deve ser sempre o mais simples possível. Entende-se possível como aquele que, a despeito da sua simplicidade, retém o que é essencial para os objetivos de controle almejados. Deve-se buscar a síntese de modelos compatíveis com a lei de controle empregada. Os métodos de obtenção de modelos médios (averaged) no Espaço de Estados são, do ponto de vista do controle, os mais indicados. O modelo vis-a-vis do controle – 2 – - Comentários Alguns cuidados devem ser observados quanto ao modelo para o controle: O conversor em malha fechada pode ter comportamentos dinâmicos distintos da operação em malha aberta. Inversores controlados em corrente apresentam comportamentos não lineares. Leis de controle não linear (a estrutura variável por modos deslizantes, por exemplo). Certos conversores requerem aproximações mais finas: os conversores ressonantes podem requerer a incorporação de termos de segunda ordem na aproximação. Modelos em tempo discreto são, em geral, interessantes para aplicações em controle de conversores pela sua natureza mesma (cíclica, chaveada). O modelo vis-a-vis do controle – 3 – - Representação matemática dos fenômenos físicos Vimos até aqui técnicas para descrever os conversores sob a forma de sistemas dinâmicos descritos no Espaço de Estados. Vimos aspectos relevantes dos sistemas chaveados e como harmônicos e oscilações de corrente e tensão. Vimos como obter equivalentes contínuos de sistemas chaveados: Modelando os conversores pelo comportamento médio num período. Linearizando os elementos não lineares e deduzindo modelos no Espaço de Estados para pequenos sinais em torno do ponto de operação Estudamos técnicas de modelagem de conversores onde a aproximação de primeira ordem não é suficiente: os conversores ressonantes podem requerer a incorporação de termos de segunda ordem na aproximação. Vários exemplos foram apresentados da obtenção destes modelos. O modelo vis-a-vis do controle – 4 – - Modelo simplificado ou “a dinâmica que interessa” Os modelos estudados foram simplificados em vários aspectos, sempre que possível. Reteve-se o que era essencial no modelo, tendo em conta a sua aplicação em controle e simulação numérica. Os modelos são elaborados em função da aplicação que visam, além das suas características inerentes. Técnicas que ajudam na decisão pelo melhor modelo de conversor: i) Funções de Descrição, aproximando por harmônicas modelos complexos de circuitos chaveados; ii) Teoria das Perturbações e aproximações pela média; iii) Modelos linearizados de pequenos sinais; O modelo vis-a-vis do controle – 5 – - Insights A partir daqui, os aprimoramentos dos modelos vêm junto com a técnica de controle escolhida para o conversor. Discutiremos, na parte final deste mini-curso, alguns aspectos relevantes e alguns exemplos de controle de conversores estáticos. A abordagem buscada aqui é sempre no sentido da aproximação das técnicas de controle e da modelagem do conversor. Não se pretende aqui apresentar técnicas ou resultados novos de controle de conversores. O foco é a modelagem. Técnicas de Controle de Conversores O primeiro passo para fazer o controle eficiente do conversor já foi dado: obter de forma apropriada o seu modelo em Espaço de Estados. Em muitos casos é apropriado utilizar-se o modelo em tempo discreto ou modelo de sinais amostrados. Sendo o conversor na sua essência um circuito discreto (chaveado) com freqüência de chaveamento controlada, é natural utilizar-se períodos de amostragem do modelo em tempo discreto intimamente relacionados com esta freqüência (igual ou múltiplo). De posse do modelo no Espaço de Estados (discreto ou contínuo) o projeto do controlador um um procedimento corrente na teoria de controle. Técnicas de Controle de Conversores - Modelo amostrado 1 A partir de modelos contínuos, obtidos pelas técnicas apresentadas anteriormente, dispõe-se de ferramentas numéricas para a obtenção do modelo discreto. Exemplo: dx Ax(t ) Bu(t ) dt y (t ) Cx (t ) Du(t ) Modelo em tempocontínuo Obtém-se o modelo amostrado como: x[k 1] A x[k ] B u[k] Modelo amostrado y[k] Cx[k ] Du[k ] T onde : A e AT , B e A(T- ) B d , C C , D D 0 com T períodode amostragem Técnicas de Controle de Conversores - Modelo amostrado 2 Seja o modelo contínuo, linear e invariante no tempo: dx Ax(t ) Bu(t ) dt y (t ) Cx (t ) Du(t ) 2 -1 A 1 0 3 - 3 3 1 2 ; B 0 0 1 0 1 ; C 1 0 0 0 e D0 Obtém-se o modelo amostrado como: x[k 1] A x[k ] B u[k] y[k] Cx[k ] Du[k ] onde : 1.0002 - 0.0001 0.0003 1.000 0.000 A 0.0001 1.0000 0.0002 , B 10 4 0.000 1.000 , C C , D D 0.0003 - 0.0003 1.0001 0.000 0.000 com T 10 4 Técnicas de Controle de Conversores - Modelo amostrado 3 Note que se aproximássemos: x Ax(t ) Bu(t ) t y (t ) Cx (t ) Du(t ) x(k 1) I AT x(k ) BTu(k ) y(k 1) Cx(k ) Du(k ) com x(k 1 ) x(k) x e t T Neste caso, as matrizes são as mesmas até, pelo menos, a 4a. casa decimal: A I AT , B BT 1.0002 - 0.0001 0.0003 1.000 0.000 A 0.0001 1.0000 0.0002 , B 10 4 0.000 1.000 , C C , D D 0.0003 - 0.0003 1.0001 0.000 0.000 com T 10 4 Técnicas de Controle de Conversores - Modelo amostrado 4 - Considere agora um sistema não linear: dx f ( x(t ),u (t )) dt y (t ) g ( x(t ),u (t )) Alguns cuidados especiais devem ser tomados na discretização destes sistemas: Sistemas não lineares costumas expandir a largura de banda de suas entradas. Portanto, a escolha da freqüência de amostragem é importante para evitar-se, entre outras coisas, o fenômeno de aliasing. Admitindo-se certas condições às não linearidades (deriváveis, sem memória, etc.) é possível obter-se modelos simples, desde que a freqüência de amostragem seja grande o suficiente. Tomando-se os cuidados acima, podemos aproximar o modelo amostrado por: x(k 1) x(k ) f ( x(k ),u (k ))T y(k ) g ( x(k ),u (k )) Técnicas de Controle de Conversores - Modelo amostrado 5 (Exemplo) - Veja o exemplo de duas situações de amostragem e síntese do PWM: A amostragem se dá sempre no meio do pulso, para minimizar os efeitos de transitório A atualização se dá no fim do ciclo 1 - A freqüência de amostragem é a mesma do chaveamento do PWM 2 - A atualização de Vc se dá uma vez por ciclo A atualização se dá no instante da amostragem 1 - A freqüência de amostragem é o dobro do chaveamento do PWM 2 - A atualização de Vc se dá em dois instantes de amostragem por ciclo Técnicas de Controle de Conversores - Controle Clássico e Controle Avançado Controle Clássico: aplica-se a sistemas lineares (ou linearizados), utilizando-se de ferramentas do domínio da freqüência aplicadas funções de transferência: Para estabelecer a robustez: margens de fase e de ganho. Para estabelecer a resposta dinâmica, o parâmetro é a banda passante, a freqüência de corte, associadas com a alocação dos pólos do sistema em malha fechada. A vantagem desta abordagem reside na maturidade das técnicas de projeto, nos inúmeros exemplos disponíveis e na simplicidade na interpretação física do sistema. Aspectos, como o da rejeição a perturbações, são bastante bem caracterizados pelo controle no domínio da freqüência e, sobretudo, existe uma familiaridade e boa aceitação deste tipo de controle no meio industrial. Técnicas de Controle de Conversores Estratégias simples Controle on-off : trata-se de controladores do tipo “liga-desliga” usado principalmente nas malhas de corrente através da comparação do erro de corrente (comparador e sample and hold); a freqüência de chaveamento é variável. Controle de histerese: traz melhoria ao esquema acima através da modulação do sinal do erro por uma portadora triangular de freqüência definida e submetido a um comparador de histerese; o resultado é uma modulação PWM senoidal de conteúdo harmônico bem definido; A desvantagem é não alcançar atracamento perfeito à referência. Controlador PI: nesta estratégia simples e largamente utilizada, a referência para o PWM senoidal é a soma do erro multiplicado por um ganho (proporcional) e a sua integral, multiplicada por seu ganho (integral). Técnicas de Controle de Conversores - Controle Avançado – Espaço de Estados Controle no Espaço de Estados: aplica-se a sistemas tanto lineares quanto não lineares; Existem várias técnicas de projeto de controladores baseados no modelo de Espaço de Estados: O mais geral é o controle por realimentação estática de estados e alocação de pólos. Para sistemas não lineares passíveis de linearização por realimentação de estados, as técnicas usuais de alocação de pólos também se aplicam. Dada a natureza dos conversores de potência, inerentemente amostrados, é comum se trabalhar com o modelo discretizado das Equações de Estado. Neste bojo, controladores dead-beat, de estrutura variável, dentre outros, são largamente utilizados. Técnicas de controle avançado vêm sendo bastante empregadas para responder a problemas específicas da planta. controle adaptativo, controle robusto, etc; o controle repetitivo associado com outros. Técnicas de Controle de Conversores - Controle Avançado – Exemplos Veremos, a seguir, alguns exemplos de controladores (em simulação) aplicados a uma UPS (Uninterruptable Power Source). Controle por realimentação de estado e alocação de pólos. Sem compensação de atraso. Com compensação de atraso. Controle Deadbeat. Sem compensação de atraso. Com compensação de atraso. Controle repetitivo adicional. Bibliografia LIVROS: 1. Power Electronics Converters, Application and Design - Moham, N. T., M Undeland and W.P. Robbins – John Wiley, New York. 2. Fundamentals of Power Electronics – Erikson, R. W., Ed. Chapman & Hall, 1997. 3. Principles of Power Electronics – Kassakian, J. G., Schlecht, M. F e Verghese, G. C. - Addison – Wesley Publishing Co., 1991. 4. Power Electronics and Variable Frequency Drives Technology and Application – Bismal K. Bose – IEEE Press. Bibliografia Artigos em periódicos e revistas sobre os tópicos do curso: 1. S. R. Sanders, J. M. Noworolski, X. Z. Liu e G. Verghese, Generalized Averaging Method for Power Conversion Circuits, IEEE Trans. On Power Elecronics, vol. 6, no. 2, pp. 251- 259, Abril 1991. 2. E. X. Yang, F. C. Lee e M. M. Janovic, Small Signal Modeling of Series and Parallel Resonant Converters, Power Electronics Specialists Conference, 1992. PESC '92 Record., 23rd Annual IEEE , 29 June-3 July 1992; Pages:941 - 948 vol.2 3. Krein, P.T.; Bentsman, J.; Bass, R.M.; Lesieutre, B.L., On the use of averaging for the analysis of power electronic systems, Power Electronics, IEEE Transactions on, Volume: 5 , Issue: 2 , April 1990, Pages:182 - 190 4. Witulski, A.F.; Erickson, R.W.; Extension of state-space averaging to resonant switches and beyond; Power Electronics, IEEE Transactions on ,Volume: 5 , Issue: 1 , Jan. 1990 Pages:98 – 109 5. Sanders, S.R.; Verghese, G.C.; Synthesis of averaged circuit models for switched power converter; Circuits and Systems, IEEE Transactions on ,Volume: 38 , Issue: 8 , Aug. 1991, Pages:905 – 915. 6. Forsyth, A.J.; Ho, Y.K.E.; Ong, H.M.; Comparison of small-signal modelling techniques for the series-parallel resonant converter; Power Electronics and Variable-Speed Drives, 1994. Fifth International Conference on , 26-28 Oct 1994, Pages:268 - 273
Baixar