“Detecção de Meteoros Utilizando
Espalhamento para Frente de Ondas
Eletromagnéticas do Tipo VHF”
Aluna: Cristina Schoch Vianna
Orientador: Bernard M. Maréchal
Defesa de Dissertação de Mestrado
1
Tópicos
• Introdução;
• Modulações AM, FM e sua utilização em transmissão de
televisão e de sinais de aeroportos;
• Meteoros;
• Sistema de Aquisição de Dados:
– UFRJ;
– BNL.
• Antenas Utilizadas;
• Calibração do Sistema de Aquisição de Dados;
• Sinais Provenientes de Diferentes Fontes:
– Aviões;
– Meteoros: Caudas sub-densas e super-densas;
– “Eventos Estranhos”.
• Conclusão e Próximos Passos.
2
Introdução
• MARIACHI (Mixed
Apparatus for RADAR
A• técnica
“Radio
Metor
Objetos
Refletores:
Investigation
of
Cosmic-Ray
of
Scatter” (RMS) é utilizada
–estudo
Meteoros;
High
– BNL –
paraIonization)
de diversas
EUA;
– Aviões;de meteoros e
características
• DRACON
(Detecção
de Raios
micro-meteoros,
e permite,
– Relâmpagos;
Cósmicos
ONdas
com umautilizando
única antena,
cobrir
Raios
6 km
uma –área
de 10Cósmicos.
.
eletromagnéticas)
– 2UFRJ
–
Brasil.
3
Espectro de Rádio Freqüência
• Ondas de Alta Freqüência (HF) – 3 a 30 MHz
– Refletem na atmosfera terrestre, retornando à superfície
terrestre;
– Utilizadas para comunicação em grandes distâncias por
radioamadores.
• Ondas de Freqüência Muito Alta (VHF) – 30 a 300
MHz
– Não refletem na atmosfera terrestre, sendo restritas a
área local;
– Utilizadas por transmissões de rádio FM, televisão
aberta, balizas de aviões, etc.
4
Modulação – Métodos e Utilização
• Modulação em Amplitude;
• Modulação em Ângulo:
– Modulação em Freqüência (NFM, WFM);
• Transmissões:
– Televisão;
– Aeroportos.
5
Modulação em Amplitude (AM)
Definição:
VAM t Vp Vm t cos2 f pt
• Vp – amplitude da tensão do sinal da portadora;
• fp – freqüência do sinal da portadora;
• Vm(t) – tensão do sinal modulante.
Se:
Vm (t ) Vm cos(2f m t )
• fm – freqüência do sinal modulante.
V
Definindo:
M m
Vp
Temos que:
M
VAM t V p cos2 f p t cos 2 f p f m t cos 2 f p f m t
2
6
Modulação em Amplitude (AM)
7
Modulação em Ângulo
Definem-se :
VANG Vp cost
1 d
f (t)
2 dt
• Vp – amplitude da tensão do sinal da portadora;
• (t) – ângulo do sinal modulado;
• f (t) – freqüência do sinal modulado.
8
Modulação em Freqüência
Definição:
f FM f p k f Vm cosm t
• kf – sensitividade de freqüência do sinal modulante.
Define-se:
Obtém-se que:
k f Vm
mf
fm
FM (t) p t mf sen(m t)
Logo:
VFM (t) Vp cos(p t) cos[mf sen(m t)] Vp sen(p t) sen[mf sen(m t)]
9
Narrow-band FM (NFM)
Se mf << 1:
cos[mf sen(m t )] 1
sen[mf sen(m t )] mf sen(f t )
Então:
1
VFM ( t ) Vp cos( p t ) m f Vp {cos[( p m ) t ] cos[( p m ) t ]}
2
Que é similar à tensão do sinal AM, tendo uma fase na
banda inferior.
10
Wide-band FM (WFM)
mf >>1:
VFM ( t ) Vp {J 0 mf cosp t J1 mf cosp t m t cosp t m t
J 2 mf cosp t 2m t cosp t 2m t }
Onde:
4
mf 2
mf
n
m 1 2
2
J n (m f ) f
1
2 n! 1!n 1 2!n 2n 1
11
Wide-band FM (WFM)
12
Transmissão de Televisão
Faixa de Freqüência (MHz)
• Canal
Envia simultaneamente
os
2 de áudio (FM)
54-60e vídeo
sinais
3
60-66
(AM);
4
66-72
• Largura
de banda
de 6 MHz;
5 impedir interferência
76-82
• Para
a
6
82-88
portadora
de áudio
e de vídeo
7 separadas de
174-180
estão
4.5 MHz;
8 mesmo motivo,
180-186as
• Pelo
9
186-192
portadoras
de luminância
10
192-198ao brilho e
(informação
referente
11
198-204
contraste)
e crominância
12
204-210à cor)
(informação
referente
13 separadas de
210-216
estão
3.58 MHZ.
13
Baliza VOR de Aeroporto
• Opera em VHF (108.0 a 117.95 MHz) com
largura de banda de 50 kHz;
• Sinal de referência:
– Modulado em amplitude;
– Omnidirecional;
– Envia um sinal senoidal com freqüência de
30 Hz.
• Sinal variável:
– Modulado em freqüência;
– Obtido por irradiar o sinal de 48 antenas 30
vezes por segundo.
• Possui uma sub-portadora de 9960 Hz para
separar os dois sinais;
• Envia o Código Morse da identificação do
aeroporto.
14
Os Meteoros
Chuva
Período de Visibilidade
Quadrantídeos
1 a 4 de Janeiro
Lirídeos
19 a 24 de Abril
• Vistos por todo o ano;
Aquarídeos
21 de Abril a 12 de Maio
– Periódicos ou Chuvas
de Meteoros:
Arietídeos
29 de Maio a 19 de Junho
• São classificados em
dois tipos:
– Esporádicos:
• Vistos durante alguns
dias do ano e parecem
originar de um único
ponto ou pequena área
do céu (radiante);
• São conhecidos pela
constelação da qual
parece se originar.
Aquarídeos Austrais 21 de Julho a 15 de Agosto
Perseídeos
15 de Julho a 17 de Agosto
Orionídeos
18 a 26 de Outubro
Taurídeos Austrais
18 de Setembro a 15 de
Dezembro
Leonídeos
14 a 20 de Novembro
Geminídeos
7 a 15 de Dezembro
Ursídeos
17 a 24 de Dezembro
15
Variação da Incidência de Meteoros
• De manhã :
– Meteoros com direção oposta à
Terra;
– Meteoros com mesma direção,
porém com velocidade menor
que a Terra:
V1 30 km / s
• De noite:
– Meteoros com mesma direção
da Terra, porém com
velocidade maior que a Terra.
V2 30 km / s
A massa terrestre aumenta em torno de 105 Toneladas por ano
devido a incidência de meteoros.
16
Parâmetros das Caudas de Meteoros
• Altitude:
– Depende da velocidade, massa e
ângulo zênite do meteoro;
– Geralmente:
• Raio Inicial:
0.55m r0 4.35m
– Pode ser aproximado por:
80 km h 120km
ma – massa média dos átomos da
atmosfera;
• u – velocidade do meteoro;
• ra – densidade atmosférica.
•
• Comprimento:
– Depende da massa e do ângulo
zênite;
– Meteoros esporádicos:
comprimento 15km
– Meteoros periódicos:
comprimento 50km
m a u0.8
r0 2.58 x 10
ra
12
• Difusão:
r r02 4Da t
Da
7m a
kT
8ra mm
• Da – coeficiente de difusão;
• k – constante de Boltzmann;
• T – temperatura;
• mm – massa média dos átomos;
• = 7 x 10-19 m2.
Em um segundo o raio
log10 Da 0.067h 5.6 varia de 2 a 20 metros.
17
Reflexão de Ondas Eletromagnéticas
18
Reflexão de Ondas Eletromagnéticas
• Não se leva em consideração a contribuição dos íons;
• Os életrons livres da cauda oscilam com a Freqüência de Langmuir
(Freqüência de Plasma):
• Dois casos:
N ee2
p
0me
– Caudas Sub-densas: N < Ne. O espalhamento é feito individualmente por cada
elétron;
– Caudas Super-densas: N > Ne. Reflete completamente a onda incidente e a cauda
é tratada como um cilindro refletor.
• Para os Canais 2 (fpv = 55.25 MHz) e 4 (fpv = 67.25 MHz), o limite entre as
caudas ocorre quando Ne = 3.86 x 107 cm-3 e Ne= 5.61 x 107 cm-3.
• A freqüência ideal está entre 50 a 120 MHz;
• Abaixo de 30 MHz, a ionosfera reflete as ondas de rádio.
• Acima de 120 MHz, a capacidade de reflexão da cauda diminui.
19
Reflexão de Ondas Eletromagnéticas
• A recepção ocorre quando há interferência;
20
Reflexão de Ondas Eletromagnéticas
•Conhecendo-se o tamanho das zonas de
Fresnel, pode-se determinar:
–Posição da enésima zona de Fresnel:
–Velocidade do meteoro:
u(n )
s( n )
n m
t mn
nR T R R
R T R R 1 sen 2 cos2
nR T R R
R T R R 1 sen 2 cos2
•Logo, para determinar a velocidade devem
ser conhecidos:
–Distância entre o receptor e o
transmissor ao ponto de reflexão;
–Ângulo de espalhamento da onda
eletromagnética.
21
Simulação de Caudas Sub-densas e
Super-densas
22
Vantagens do Método de Rádio
•
•
•
•
•
•
Independente das condições meteorológicas;
Pode-se adquirir dados 24 horas por dia;
Detecta meteoros muito pequenos (microgramas);
Baixo custo do sistema;
Fácil instalação;
6
Ampla região coberta (aproximadamente 10
2
km );
23
Sistema de Aquisição de Dados
UFRJ
• É composta por:
– Duas antenas Yagi, ortogonais entre si, de 3 elementos cada,
calibrada para a freqüência de 63 MHz;
– Um receptor ICOM PCR-1000;
– Uma placa de som Delta 1010LT;
– Um GPS Deluo
• Esta estação está operante.
• Uma nova antena V-beam está em construção.
24
Sistema de Aquisição de Dados
Laboratório Nacional de Brookhaven
25
Antenas Utilizadas
• Yagi:
– Possui 3 elementos: um excitador, um
refletor e um direcionador.
– É uma antena de alto ganho;
– O comprimento e o diâmetro de cada
elemento dependem da freqüência
operante da antena.
– Possui uma faixa de freqüência extreita.
• Bicônica:
– Possui 2 elementos cônicos que apontam
em direções opostas;
– Opera na faixa de freqüência de 30 MHz
a 300 MHz.
26
Espectrograma
• Representa a evolução da
freqüência de um sinal em
função do tempo, com valores de
amplitude indicados por uma
escala de cores ou de cinza.
• Pelo Teorema de Nyquist, a
freqüência máxima é igual a
metade da taxa de amostragem
da placa de som.
• Para evitar distorções deve-se
escolher um filtro passa-banda
de largura menor que a
freqüência máxima
27
Calibração do Sistema de Aquisição
• Estudar a resposta do sistema à sinais de
diferentes durações:
– Raios cósmicos:
20ms t 50ms
– Meteoros:
t 0.1s
28
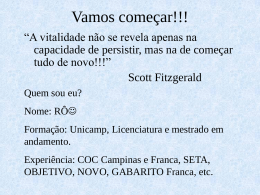
Calibração do Sistema de Aquisição
Resposta do sistema para sinais de diferentes durações.
Espectrograma obtido para um sinal emitido de
20 microsegundos de duração
Espectrograma obtido para um sinal emitido de
500 milisegundos de duração
29
Características do Sinal para Análise
• Aviões:
– Efeito Doppler;
– Sinais com duração de alguns minutos;
– Raio de 500 km.
•
Meteoros:
– Caso a reflexão ocorra pela cauda não há Efeito Doppler;
– Sinais com duração de décimos de segundos a algumas dezenas de segundos;
– Raio de 1000 km, correspondente a um área de 106 km2.
• Raios Cósmicos:
– sinais com duração da ordem de dezenas de microsegundos;
– Raio 300 km, correspondente a uma área de 105 km2;
– Para raios cósmicos ultra-energéticos, significa aproximadamente 105 eventos
por ano. O Auger possui uma área coberta de aproximadamente 3000 km2,
equivalente a 103 eventos de raios cósmicos ultra-energéticos por ano.
• Relâmpagos e Raios, e-clouds, OVNIs, etc.
30
Aviões
• A freqüência da onda recebida é dada pelo efeito
Doppler Relativístico, que pode ser aproximado
para:
ra ra rt v a
f f t
ra rt c
ra
f f r f t
• Onde:
–
–
–
–
–
–
ra = vetor posição do avião;
rt = vetor posição da estação transmissora;
fr = freqüência da onda recebida;
ft = freqüência da onda transmitida;
va = velocidade do avião;
c = velocidade da luz.
• Quando o avião estiver muito distante de ambas
estações: ra // rt
v
f max f t 1 2 a
c
v
f min f t 1 2 a
c
31
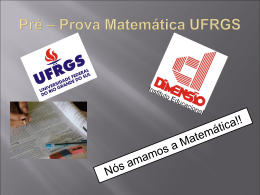
Sinais Provenientes de Aviões
•
•
•
•
•
(a) e (b) – “eventos estranhos”;
(c) – sinal variável de freqüência 30 Hz do VOR;
(d) – terceiro harmônico do sinal de freqüência de 30 Hz do VOR;
(e) – avião mudando de direção;
(f) e (g) – avião.
32
Sinais Provenientes de Meteoros
33
Sinais Provenientes de Meteoros
Caudas Sub-densas
• (a) Cauda sub-densa se afastando da estação receptora;
• (b) Cauda sub-densa se aproximando da estação
receptora;
• (c) Longa cauda sub-densa.
34
Sinais Provenientes de Meteoros
Caudas Super-densas
• (a) Cauda super-densa;
• (b) Cauda sub-densa ou fragmentação da cauda superdensa.
35
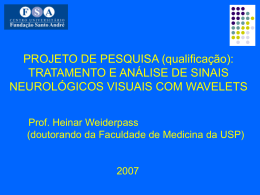
Sinais Provenientes de Meteoros
Caudas Super-densas
• Observa-se o efeito doppler causado pela reflexão na cabeça de
ionização da cauda do meteoro;
• A interferência de ondas provenientes de diferentes pontos de
reflexão produzem as oscilações observadas.
36
Lirídeos
• Ocorreu no período de 16 a 25 de
Abril.
• Obtém-se um máximo durante o dia,
por volta de 11 horas da manhã;
• A incidência máxima ocorreu em 22 de
Abril, com mais de 200 meteoros por
hora;
• Observa-se um aumento na contagem
no dia 25 de Abril, devido à Chuva PiPuppids;
• Extensão do campo de meteoros de
aproximadamente 13 x 106 km;
• Adquirir dados nos próximos anos para
observar se o campo de meteoros está
se alterando.
37
Sinais Obtidos na Estação da UFRJ
38
Eventos de Curta Duração
• Com a calibração do sistema obtivemos a resposta do sistema
para a aquisição de um sinal de curta duração;
39
Eventos de Curta Duração
• Foram obtidos vários eventos deste tipo:
As diferenças entre os sinais podem ser devido a diferenças de energia,
ângulo de incidência ou altura dos chuveiros cósmicos.
40
Contagem em um Período de 24 Horas
• Não apresenta variação
diária significativa.
• Média:
15.1 3.5 eventos/ hora
41
Conclusão e Próximos Passos
• Foi possível detectar meteoros de caudas sub-densas e
super-densas com o sistema de aquisição de dados
utilizado;
• Detectaram-se as Chuvas Lirídeos e Pi-Puppids;
• Comparou-se as características das reflexões
provenientes de raios cósmicos, meteoros e aviões;
• Para estimar a velocidade e altitude dos meteoros são
necessárias mais duas estações de detecção;
• A calibração mostra que o sistema detecta eventos cuja
duração é maior que 1 microsegundo;
• Alteração da antena, do receptor e do software de
aquisição de dados estão sendo estudadas.
42
Conclusão e Próximos Passos
• É interessante a aquisição simultânea de chuvas de meteoros nas estações da
UFRJ e do BNL, para verificação de diferentes presenças de meteoros nos
Hemisférios Sul e Norte;
• Se esta técnica tiver uma performance similar para os raios cósmicos ultraenergéticos obteremos um fator em potencial na estatística de 103 em relação
a técnica convencional por um custo bem menor (aproximadamente 4000
dólares);
• Estamos em contato com experimento AUGER. Usar a estrutura do Auger
pode facilitar a verificação da técnica, utilizando-o como trigger;
• Com esta técnica é possível estudar a evolução do chuveiro atmosférico
gerado pelo raio cósmico. É interessante notar que o projeto AUGER faz
essencialmente o estudo das partículas que chegam a superfície;
• O Projeto LOPES estuda a EMISSÃO de ondas eletromagnéticas pelos raios
cósmicos de altíssimas energias ao contrário dos projetos MARIACHI e
DRACON que estudam reflexão de ondas eletromagnéticas em raios
cósmicos de altíssimas energias.
43
Agradecimentos
• Ao Hélio Takai, do Laboratório Nacional de
Brookhaven, por todo o apoio fornecido para a
realização deste trabalho;
• Ao meu orientador Bernard M. Maréchal;
• Ao professor Fernando Marroquim pela ajuda
durante a elaboração do projeto;
• Aos órgãos fundadores CNPQ, CAPES e
FAPERJ, que investiram no projeto;
44
Download