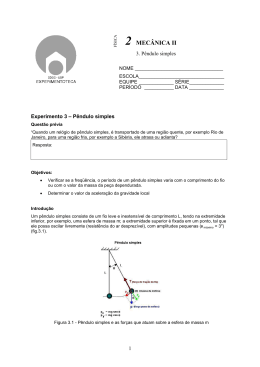
Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 OSCILAÇÃO E VELOCIDADE DO PÊNDULO SIMPLES NA MODELAGEM MATEMÁTICA Swing speed and the pendulum simple mathematical modeling Janine da Rosa ALBARELLO1 Kelly Pereira DUARTE2 Vanessa FAORO3 RESUMO Em diversos problemas práticos de mecânica, as equações matemáticas que descrevem o seu comportamento são equações diferenciais ordinárias não lineares. Naturalmente, quando são consideradas pequenas amplitudes das oscilações envolvidas, estas equações podem ser aproximadas por outras que são lineares. Este artigo discute um exemplo desse caso, o Pêndulo Simples, objetivando o estudo e a simulação de oscilações de graus (ângulos) e velocidade com relação ao tempo. Trata-se da modelagem matemática, da simulação computacional e da validação experimental de um sistema mecânico do tipo Pêndulo Simples. O objetivo é descrever a sequência de passos utilizados na formulação matemática do Pêndulo Simples. Utilizou-se o software MatLab/Simulink instalado em um microcomputador para as simulações computacionais. Os parâmetros utilizados para modelar o movimento do pêndulo são determinados por meio da balança, da plataforma de teste (software utilizado pelo professor no dia do experimento) e são consideradas as constantes, servindo para a validação experimental realizada. Como resultados, teve-se a identificação experimental, as modificações do modelo para a sua simulação computacional (com atrito) e a sua validação. Conclui-se que o presente trabalho pode servir didaticamente como exemplo das etapas fundamentais de modelagem matemática de problemas reais nas mais diversas áreas do conhecimento. Palavras chave: Pêndulo Simples, Modelagem Matemática, Simulação Computacional, Validação Experimental. ABSTRACT In many practical problems in mechanics, mathematical equations that describe their behavior are nonlinear ordinary differential equations. Of course, when considering small amplitude oscillations involved, these equations can be approximated by other than linear. This paper discusses an example of this case, the Simple Pendulum, aiming to study and simulation of fluctuations in degrees (angles) and velocity with respect to time. This is the mathematical modeling, computer simulation and experimental validation of a mechanical system of type Simple Pendulum. The aim is to describe the sequence of steps used in the mathematical formulation of the Simple Pendulum. We used the MatLab/Simulink installed on a personal computer for the computer simulations. The parameters used to model the motion of the pendulum is determined by the balance of the test platform (software used by the teacher on the day of the experiment) and are considered constants, serving for the experimental validation performed. As a result, there was the experimental identification, the modifications of the model to its computer simulation (friction) and their Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 83 Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 validation. We conclude that this study can serve as a didactic example of the fundamental steps of mathematical modeling of real problems in several areas of knowledge. Keywords: Simple Pendulum, Mathematical Modeling, Computer Simulation, Experimental Validation Símbologia M L Io G Massa do pêndulo Comprimento do pêndulo Momento de inércia do pêndulo Gravidade [kg] [m] [m2kg] [m/s2 ] 1. INTRODUÇÃO O estudo da natureza das oscilações e a descoberta da periodicidade do movimento pendular foi desenvolvido por Galileu Galilei. O movimento de um Pêndulo Simples envolve basicamente uma grandeza chamada período (simbolizada por T): é o intervalo de tempo que o objeto leva para percorrer toda a trajetória (ou seja, retornar a sua posição original de lançamento, uma vez que o movimento pendular é periódico). Em mecânica, um Pêndulo Simples é um instrumento ou uma montagem que consiste num objeto que oscila em torno de um ponto fixo. O braço executa movimentos alternados em torno da posição central, chamada posição de equilíbrio. O Pêndulo é muito utilizado em estudos da força peso e do movimento oscilatório. Atualmente busca-se utilizar o Pêndulo Simples para determinar a aceleração da gravidade da Terra. Apesar de todos os cuidados adotados, há habilidades das interferências de erros nos resultados que podem até torná-los sem valor. A atualização do Pêndulo Simples permite identificar a possibilidade de observar a influência das fases da Lua sobre a variação do campo gravitacional da Terra e, consequentemente, nas marés terrestres. O atual artigo apresenta um estudo teórico sobre um Pêndulo Simples, seguido de equações que representam o modelo matemático, levando em consideração um Pêndulo sem atrito e por fim representação através de simulações e conclusões sobre o mesmo. Este trabalho tem por objetivo não só aprofundar os conhecimentos sobre o modelo matemático em questão, como também avaliar os resultados obtidos na prática em relação aos computacionais, comparando ambos os gráficos. Como metas, pretende-se desenvolver o modelo matemático do Pêndulo Simples, bem como a construção do diagrama de blocos no MatLab/Simulink para realização das simulações a fim de obter resultados aceitáveis aos do experimento real. 2. MATERIAIS E MÉTODOS O modelo matemático foi apresentado a partir do estudo e busca em referenciais teóricos, fazendo um levantamento e seleção do material encontrado. A partir do experimento, será obtida a solução utilizando os ferramentais no laboratório em Panambi, com uma plataforma de teste utilizada pelo professor, balança para medir o peso da massa e também uma fita métrica. Posteriormente, foi realizada a simulação no MatLab/simulink, utilizando o conhecimento e as dicas fornecidas durante as aulas, pelo professor e também pelos colegas, a partir dos comandos e Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 84 Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 o recurso computacional do MatLab/simulink. 2.1 Modelagem Matemática O Pêndulo Simples é um sistema mecânico ideal constituído de uma partícula de massa m suspensa e raio r, ligada por um fio de comprimento L a um ponto fixo. [4] Quando o Pêndulo está em posição de equilíbrio, as duas forças que agem sobre a partícula, o seu peso (m g) tensão aplicada pelo fio, se equilibram. Porém, se o Pêndulo for afastado de sua posição de equilíbrio, de modo que a direção do fio faça um ângulo Ө com a vertical, o componente do peso perpendicular ao fio, de intensidade (-m g sin ) no sentido de restaurar o equilíbrio, fazendo o Pêndulo oscilar com um movimento periódico T. Em uma primeira aproximação (desprezando o efeito da resistência do ar e atrito) consideramos que as forças que atuam são: peso P = m g e a tensão no fio, T [4] (1) F = m g <==> m g + T = m a. Decompondo segundo as direções normal e tangencial à trajetória tem-se: - Direção normal ao movimento: T + P cos = manormal. - Direção tangencial ao movimento: P sin = matangencial (2) Figura1: Pêndulo Simples A Figura 1 mostra o Pêndulo simples e as forças que atuam sobre a esfera de massa m, onde L é o comprimento do fio, é o ângulo formado entre a posição de equilíbrio e o ponto de máxima extensão medida em radianos, x é a projeção do movimento da massa sobre o eixo horizontal, T é a força de tração do fio, p é a força peso da esfera, Px= m.g.sen e Py= m.g.cos . d 2s Assim, a aceleração tangencial é a derivada segunda da posição, então substituindo atang = 2 dt Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 85 Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 na equação (2). d 2s (3) . dt 2 A esfera descreve um arco de circunferência de comprimento s ao realizar o seu movimento. A posição em cada instante pode ser escrita em função do raio da trajetória, L, e da posição angular . s=L (4) sendo: L = L0 + r da mesma forma, a aceleração tangencial pode ser expressa em função de L e - m.g.sin = m atang = d 2s d 2 = 2 L dt 2 dt (5) d 2 (6) dt 2 Substituindo na equação (3) d 2 - mg sin - mL 2 = 0 (7) dt Dividindo a equação (7) por “- mL” g d 2 + sin = 0 (8) L dt 2 Considerando que o ângulo é suficientemente pequeno, sin ≈ 0 ( 50 < < 100), a equação anterior representa a equação de um Movimento Harmônico Simples. d 2 + g = 0 (9) L dt 2 A solução desta Equação Diferencial Ordinária (EDO) é dada pela equação (10): (t) = c1 ewi + c2 e- wi. (10) Aplicando as propriedades dos números de Euler na equação (10), (t) = c1(cos wt + i sin wt) + c2(cos wt – i sin wt) (11) (t) = (c1 + c2) cos wt + i(c1 – c2) sin wt (12) onde C1 = (c1 + c2) e C2 = i(c1 - c2). Logo: (t) = C1 cos wt + C2 sin wt (13) atang = Considerando w = (t) = C1cos ( g , temos finalmente que: L g g t) + C2sin ( t) L L (14) Complementado com as condições iniciais (0) = 0 e dada por: g t) L é o ângulo máximo que o Pêndulo atinge. (t) = 0 cos( onde 0 Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 d = 0, a solução da equação (14) é dt (15) 86 Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 = amplitude do movimento no instante 0= amplitude inicial do movimento (amplitude máxima) g = frequência angular do movimento, L t = instante do movimento oscilatório. A equação (15) evidencia que o ângulo é uma função periódica do tempo e que varia g com freqüência natural fnat = . L Então, o período da oscilação é: L . (16) T0 = 2 π g Sendo assim, uma função exclusiva do comprimento do Pêndulo e da aceleração da gravidade no local. O conhecimento do período e do comprimento do Pêndulo permite calcular o valor da aceleração da gravidade, na medida em que sejam válidas as aproximações assumidas na dedução dessa equação. No momento da realização do movimento oscilatório do pêndulo, há atrito, onde se opõe à tendência de movimento do corpo sobre a superfície e é decorrente, entre outros fatores, da existência de pequenas irregularidades das superfícies em contato. Para a implementação em diagrama de blocos (Figura 3) no MatLab/Simulink usa-se a equação do atrito: (17) Onde TC representa o torque devido à característica de atrito Coulomb, TS torque de atrito estático. 3. RESULTADOS E DISCUSSÕES Nesta etapa, foi abordada grande parte do processo, desde a experimentação no laboratório até a pesagem da massa, medição de altura e regulagem de ângulo. Foi apresentado também o diagrama de blocos feito a partir do MatLab/Simulink, sendo que o mesmo foi desenvolvido junto à disciplina. A definição dos parâmetros utilizados na simulação foi exposta em uma tabela para a melhor visualização dos dados, para posteriormente, ser apresentado o resultado dessa simulação e a validação do experimento. 3.1 Diagrama de blocos A construção do diagrama de blocos em que foi baseada através do MatLab/Simulink Library Browser(Figura 4), onde foi baseada na equação Equação Diferencial Ordinária não linear, levando em conta o atrito. (17) θ ''+ ßθ' /mL2 + g.sen( θ)/L=0 θ ''= - ßθ' /mL2 - g.sen( θ)/L (18) Sabendo que as condições iniciais: θ (t=0)= θ0 θ(t=0)= θ0=0 Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 87 Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 Figura 2: Diagrama de blocos do modelo matemático do pêndulo simples. Para a construção foram utilizados dois integradores, pois a equação (17) é de segunda ordem, através dos integradores, tem-se então o dTeta e Teta. Observou-se que esses estão sendo multiplicados pelos seus respectivos coeficiente e funções, conforme a equação (18). O bloco To workspace, serve para exportar dados do Simulink para o MatLab (área de comando). O bloco torque de atrito está encapsulado em subsistemas e em variáveis, que descrevem a força de atrito que está presente no problema, conforme a Figura 3: Figura 3: Diagrama de blocos do modelo matemático do pêndulo simples. Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 88 Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 3.2 Definição dos parâmetros do sistema Para adquirir os parâmetros, pega-se pelo menos duas amplitudes do gráfico gerado: X1=85; X2=77; Sabe-se que o valor de delta é: X1 (19) ln X2 Fazendo aproximação, chega-se: ξ =1/(((2*pi)/delta)^2+1)^0.5 (20) Sabendo que: gravidade é: g=9.81; massa=0.83 kg; L=0.27 (comprimento); θ = - 90; Calcula-se então o valor de ß ß=2*m*L^2*(g/L)^0.5*qsi (21) Descrição do parâmetro Notação Valores Massa do pêndulo M 0.830 kg Comprimento do pêndulo L 0.27 m Aceleração da gravidade g 9.81 m/s2 B 0.007589N.s/ m Coeficiente amortecimento viscoso de Observações: Determinada a partir da medição com uma balança. Medido com uma régua. Tabela 1: Valores adotados para os parâmetros do modelo matemático do pêndulo simples. 3.3 Resultados de simulação computacional Para a verificação dos resultados, foram gerados gráficos no MalLab, observando a oscilação em relação ao tempo, graus, velocidade e comparando o gráfico experimental com o computacional (através de dados coletados). Para a execução foi construído um M-File no MatlLab. No carregamento desses dados, foi construído outro M-File, capaz de plotar gráficos, visualizando o movimento oscilatório do Pêndulo. Com isso é possível observar o ângulo, o tempo, a velocidade e também, comparar o gráfico gerado computacionalmente com a simulação experimental. A Figura 4 demonstra o movimento oscilatório do pêndulo em relação ao grau (-90) e ao tempo (segundos). Percebeu-se que inicialmente o movimento é transitório, conforme aumenta o tempo, diminui a inclinação do ângulo, até chegar a um determinado momento, que tanto o tempo quanto o grau serão próximos de zero, entrando em um movimento permanente até sua parada, que ocorre após 30 segundos. Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 89 Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 Figura 4: Simulação Computacional, θ= -90, com tempo de atraso. A Figura 4, foi simulada computacionalmente com um pequeno tempo de atraso real entre: 0.15 e 0.16 segundos iniciais, como percebeu-se no círculo vermelho. Após identificar esse tempo de atraso, observando exatamente os segundos de diferença de quando começou o movimento de oscilação, foi gerado o gráfico sem o tempo de atraso, conforme a Figura 5, para a melhor visualização do referido gráfico. Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 90 Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 Figura 5: Simulação Computacional, θ= -90, sem o tempo de atraso. Para o movimento do pêndulo, passar de oscilatório para permanente, ocorreu uma força, em que sua velocidade muda conforme o tempo (Figura 6): Figura 6: Simulação Computacional, θ= -90, velocidade sem o tempo de atraso. Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 91 Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 3.4 Descrição da bancada experimental Para o experimento realizado com o pêndulo simples, utilizou-se uma bancada experimental, composta por: → um pêndulo composto por um corpo, de determinada massa, preso a uma barra de ferro, de comprimento L; → um leitor de movimento que capta a oscilação do pêndulo ao decorrer do tempo; → um microcomputador onde esta está ligada e no qual são gravados os dados do movimento do pêndulo, retirados pelo leitor; → o MatLab é software utilizado para se obter os dados e acoplá-los ao microcomputador, podendo-se, assim, expressar estes dados através de gráficos ou tabelas. Figura 7: Imagem da bancada experimental. Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 92 Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 Figura 8: Imagem do software. 3.5 Resultados de validação experimental O gráfico gerado foi comparado computacional e experimentalmente (modelo físico). Percebeu-se que a equação do modelo matemático correspondeu ao fenômeno do modelo físico, conforme a Figura 9. Isso comprova a validação dos dados coletados na plataforma de teste, simulação experimental, com a simulação computacionalmente, feita através da equação diferencial ordinária não linear, atrito e condições iniciais. Figura 9: θ= -90, comparação da simulação computacional com a experimental Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 93 Vivências: Revista Eletrônica de Extensão da URI ISSN 1809-1636 4. CONCLUSÃO Através deste trabalho foram demonstradas as etapas de modelagem matemática de um pêndulo simples, em que a partir da utilização de algumas leis e conceitos físicos e matemáticos, foi possível desenvolver a equação que rege este sistema. O processo no laboratório foi muito importante, não só para a construção e a experiência prática do conhecimento, mas também para a integração e cooperação entre os colegas de experimento. Com a prática realizada e com a posterior simulação computacional, foi possível visualizar o movimento oscilatório do pêndulo. Percebeu-se a semelhança entre os gráficos resultantes gerados com os dados obtidos na prática e computacional. Assim foi possível analisar o comportamento do sistema, e validar o experimento. 5. AGRADECIMENTOS Aos financiadores UNIJUÍ pelo oferecimento da bolsa e sua estrutura, ao professor Dr Antonio Carlos Valdiero, pela oportunidade de realizar os ensaios no laboratório de Engenharia Mecânica do Campus Panambi e ao professor Dr Daniel Curvello de Mendonça Muller pela orientação. 6. REFERÊNCIAS BIBLIOGRÁFICAS http://www.brasilescola.com/fisica/movimento-oscilatorio.htm. Acesso em 24/07/2013. http://www.sofisica.com.br/conteudos/Ondulatoria/MHS/pendulo.php. Acesso em 24/07/2013. http://educar.sc.usp.br/licenciatura/2001/pendulo/PenduloSimples_HTML.htm. Acesso em 24/07/2013. http://www.ufsm.br/gef/MHS/mhs05.pdf. Acesso em 24/07/2012. Acesso em 24/07/2013. http://professorandrios.blogspot.com.br/2011/06/pendulo-simples-laboratorio-de-fisica.html. Acesso em 25/07/2013. http://www.trabalhosfeitos.com/ensaios/Relatorio-Pendulo-Simples/355928.html. Acesso em 25/07/2013. Monteiro, L. H. (2002). Sistemas Dinâmicos. São Paulo: Editora Livraria da Física. Zill, D. G. (2003). Equações Diferenciais com Aplicações em Modelagem. São Paulo: Editora Pioneira Thomson Learning. Vivências. Vol. 9, N.17: p. 83-94, Outubro/2013 94
Baixar