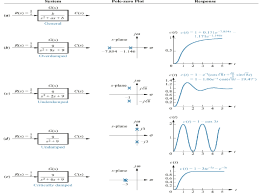
ROOT LOCUS CONTROLO 1º semestre – 2011/2012 Transparências de apoio às aulas teóricas Cap. 7 - Parte I Root Locus Todos os direitos reservados Estas notas não podem ser usadas para fins distintos daqueles para que foram elaboradas (leccionação no Instituto Superior Técnico) sem autorização dos autores 1/Cap.7 M. Isabel Ribeiro, António Pascoal Maria Isabel Ribeiro António Pascoal ROOT LOCUS Root Locus: O que é? • Root Locus = Lugar das Raízes • Root Locus – método do Lugar Geométrico das Raízes – diagrama de Evans (Evans – 1948, 1950) • Que raízes? – Do polinómio denominador da função de transferência em cadeia fechada • Como função dos pólos e dos zeros da função de transferência em cadeia aberta. • Sem factorizar o polinómio denominador da função de transferência em cadeia fechada. • O que é? – Representação gráfica da localização dos pólos de um sistema em cadeia fechada como função de um parâmetro do sistema M. Isabel Ribeiro, António Pascoal • Usualmente, este parâmetro é um ganho da cadeia aberta • Para que serve ? – Para apoio à síntese de controladores – Suporte à avaliação das características da resposta no tempo do sistema em cadeia fechada como função da variação de parâmetros 2/Cap.7 ROOT LOCUS Exemplo Motivador sistema de controlo de temperatura de uma sala K2 / s r + e _ K Gc ( s ) K 1 2 s Gc ( s ) sK 1 K 2 s K1 + + m c 1 s 1 controlador proporcional integral Exemplo visto a propósito de erros em regime estacionário 1 pólo na origem e 1 zero com controlador I com controlador PI • Como dimensionar o valor dos ganhos por forma a satisfazer especificações: • relativas ao erro em regime estacionário • e à resposta no tempo do sistema em cadeia fechada? pólos do sistema em c.f Qual é a localização dos pólos da f.t.c.f como função do valor dos ganhos? 3/Cap.7 M. Isabel Ribeiro, António Pascoal com controlador P ROOT LOCUS Root Locus: Formulação f.t.cadeia de acção R(s) + G(s) K C(s) _ H(s) f.t.cadeia de retroacção f.t.cadeia aberta (f.t.c.a.) = KG(s)H(s) f.t.cadeia fechada (f.t.c.f.) = KG(s) 1 KG(s)H(s) Como variam os pólos do sistema em cadeia fechada como função do ganho K ? resposta • Hipótese 1: Calcular explicitamente a f.t.c.f e factorizar o polinómio denominador Dados Pólos e zeros da f.t.c.a Root Locus Pólos da f.t.c.f Sem factorização do polinómio denominador da f.t.c.f E os zeros da f.t.c.f ? 4/Cap.7 M. Isabel Ribeiro, António Pascoal • Hipótese 2: a partir do conhecimento da f.t.c.a. usando o Root Locus ROOT LOCUS Pólos e Zeros da f.t.c.f R(s) + G(s) K C(s) _ G(s) NG (s) DG ( s) H(s) NH (s) DH (s) H(s) NG (s) DG ( s) C(s) KG(s) R(s) 1 KG(s)H(s) 1 K NG (s)NH (s) DG (s)DH (s) K KNG (s)DH (s) C(s) R(s) DG (s)DH (s) KNG (s)NH (s) zerosda f.t.c.f zerosde G(s) pólos de H(s) pólos da f.t.c.f. • variam com K • não podem ser conhecidos imediatamente • O Root Locus é um método gráfico que permite avaliar a localização dos pólos da f.t.c.f. sem factorizar o polinómio denominador dessa f.t. 5/Cap.7 M. Isabel Ribeiro, António Pascoal não variam com K ROOT LOCUS Exemplo Control Systems Engineering Norman Nise CameraMan Presenter Camera System Faz o seguimento automático de objectos posição do objecto R(s) sensores amplificador Motor e camâra K1 K2 s(s 10) + posição da câmara C(s) _ R(s) K s2 10s K pólos da f.t.c.f D(s) s2 10s K 0 C(s) K K1K 2 jw s1,2 5 25 K s1 0, s2 10 K 25 s1 5, s2 5 K 25 s1,2 5 j K 25 K=0 x > 10 K=25 < K=0 x O root-locus é sempre simétrico relativamente ao eixo real Como varia a resposta do sistema em c.f. a uma entrada escalão para valores crescente de K, com K>25? 6/Cap.7 M. Isabel Ribeiro, António Pascoal K 0 ROOT LOCUS Princípio subjacente KG(s) T(s) 1 KG(s)H(s) K Se s é pólo de T(s) 1 KG(s)H(s) 0 KG(s)H(s) 1 equação característica KG(s)H(s) 1 arg(KG(s)H(s)) (2k 1)180º , kZ Root-Locus = conjunto dos valores de s que satisfazem simultaneamente KG(s)H(s) 1 •condição de argumento arg(KG(s)H(s)) (2k 1)180º , k Z Comando MATLAB rlocus 7/Cap.7 M. Isabel Ribeiro, António Pascoal • condição de módulo ROOT LOCUS Princípio subjacente m KG(s)H(s) K (s z ) i i1 n (s p ) i i1 • condição de argumento arg(KG(s)H(s)) arg(K ) m n i1 i1 arg(s zi ) arg(s pi ) (2k 1) K>0 m n i1 i1 m n i1 i1 arg(KG(s)H(s)) arg(s zi ) arg(s pi ) (2k 1) K<0 M. Isabel Ribeiro, António Pascoal arg(KG(s)H(s)) arg(s zi ) arg(s pi ) (2k ) A condição de argumento permite determinar os pontos do plano que pertencem ao root-locus 8/Cap.7 ROOT LOCUS Princípio subjacente m KG(s)H(s) K (s z ) i i1 n (s p ) i i1 • condição de módulo m sz i sp i i1 n 1 i1 K sp i sz i i1 m i1 A condição de módulo permite calcular o valor de K correspondente a cada localização particular das raízes sobre o lugar geométrico M. Isabel Ribeiro, António Pascoal K n 9/Cap.7 ROOT LOCUS Root Locus - exemplo O ponto s1=–2+j3 pertence ao root-locus? Se pertencer satisfaz as condições do módulo e de argumento condição de argumento arg(KG(s1 )H(s1 )) arg(K) [arg(s1 3) arg(s1 4)] arg(KG(s1)H(s1)) arg(K) [2 1] [4 3 ] arg(KG(s1)H(s1)) arg(K) 71.57º56.31º108.43º90º arg(KG(s1)H(s1 )) arg(K) 70.55º Nunca pode ser um múltiplo impar de 180º s1=–2+j3 NÃO é pólo do sistema em c.f. 10/Cap.7 M. Isabel Ribeiro, António Pascoal [arg(s1 1) arg(s1 2)] ROOT LOCUS Root Locus - exemplo K( s 3 ) s[(s 2)2 4](s 5) + - K>0 O ponto s1=-1 pertence ao root-locus? 4 arg(KG(s1))=(2k+1) ? x 2 j2 1 x -5 o -2 s1 x -3 x 3 5 -j2 arg(KG(1)) 1 (2 3 4 5 ) Soma = zero arg(KG(s1 )) 180º 0º 180º s1 1 pertence ao root-locus Qual é o valor do ganho K para o qual o sistema em c.f. tem um pólo em -1? Para s = -1 a condição de módulo tem que ser verificada 11/Cap.7 M. Isabel Ribeiro, António Pascoal 0º ROOT LOCUS Root Locus - exemplo K( s 3 ) s[(s 2)2 4](s 5) + - K>0 condição de módulo aplicada em s = -1 x KG(1) 1 j2 M4 M2 x o M1 -2 s1 -3 -5 x 3 M3 M5 M4 x M1 2 K M2M3M4M5 4x1x 12 22 2 1 K 10 M. Isabel Ribeiro, António Pascoal K G( 1) K -j2 12/Cap.7 ROOT LOCUS Regras para a construção REGRA 1 – Número de ramos KG(s)H(s) K N(s) D(s) grau de N(s) = m grau de D(s) = n assume-se n m 1 KG(s)H(s) 0 D(s) KN(s) 0 Ramo = lugar geométrico definido por um pólo do sistema em c.f. quando K varia Nº de Ramos = n = número de pólos do sistema em cadeia fechada REGRA 2 – Simetria Os pólos de sistemas realizáveis (sistemas físicos) são, Reais, ou Complexos – ocorrendo aos pares complexos conjugados O root-locus é simétrico relativamente ao eixo real 13/Cap.7 M. Isabel Ribeiro, António Pascoal • ROOT LOCUS Regras para a construção REGRA 3 – Troços sobre o eixo real K>0 São troços do root-locus os pontos do eixo real que tenham à sua direita um número ímpar de pólos e/ou zeros da f.t.c.a. condição de argumento m KG(s)H(s) K (s z ) i i1 n K>0 (s p ) i i1 Se s Root Locus m n i1 i1 arg(KG(s)H(s)) arg(s zi ) arg(s pi ) (2k 1) 1 -zi 0º -zi 2 para pólos é idêntico 1 2 0 180º x -pi 1 0º x -pi 2 1 2 0 para pólos é idêntico 14/Cap.7 M. Isabel Ribeiro, António Pascoal 180º ROOT LOCUS Regras para a construção continuação • REGRA 3 – Troços sobre o eixo real s1 Root Locus • Pólos e zeros (f.t.c.a.) à esquerda de s1 contribuem com 0º • Pólos e zeros (f.t.c.a.) à direita de s1 contribuem com 180º • A contribuição de um par de pólos e ou de zeros complexos conjugados é nula Exemplos troços do eixo real x x x x x x só estão indicados os troços do eixo real M. Isabel Ribeiro, António Pascoal só estão indicados os troços do eixo real Não tem troços no eixo real 15/Cap.7 ROOT LOCUS Regras para a construção • REGRA 4 – Ponto de partida dos ramos • onde se inicia cada ramo do root-locus (K=0) ? G(s) NG (s) DG ( s) f.t.c.a. KG(s)H(s) K f.t.c.f. T(s) H(s) NH (s) DH (s) NG (s)NH (s) DG (s)DH (s) KNG (s)DH (s) KG(s) 1 KG(s)H(s) DG (s)DH (s) KNG (s)NH (s) pólos da f.t.c.f. s : DG (s)DH(s) KNG (s)NH(s) 0 grau(NG(s)NH(s))=m grau(DG(s)DH(s)+KNG(s)NH(s))=n m lim pólos da f .t.c.f . s : DG (s)DH (s) 0 pólos da f.t.c.a. os pontos de partida (K=0) dos ramos do rootlocus coincidem com os pólos da f.t.c.a. 16/Cap.7 M. Isabel Ribeiro, António Pascoal K 0 ROOT LOCUS Regras para a construção • REGRA 5 – Ponto de chegada dos ramos • n ramos • onde termina cada ramo do root-locus (K=) ? T(s) KNG (s)DH (s) KG(s) 1 KG(s)H(s) DG (s)DH (s) KNG (s)NH (s) Quando K G(s)H(s) 0 para ser satisfeita a condição 1 KG(s)H(s) 0 G(s)H(s) NG (s)NH (s) 0 DG (s)DH (s) s zeros de NG (s)NH (s) • m zeros • m ramos do root-locus tendem para os zeros da f.t.c.a. s • m ramos tendem para os zeros da f.t.c.a. • n-m ramos tendem para infinito Estes n-m ramos tendem para infinito segundo assímptotas Regra 8 – ângulo que as assímptotas fazem com o eixo real 17/Cap.7 M. Isabel Ribeiro, António Pascoal n-m ramos do root-locus tendem para infinito ROOT LOCUS Regras para a construção KG(s)H(s) Exemplos K s(s 1)(s 2) num=[0 0 0 1]; den=[1 3 2 0]; sys=tf(num,den); rlocus(sys) Algumas conclusões: • Para 0 K K1 o sistema em cadeia fechada tem todos os seus pólos reais • Qual é o valor de K1? • Para 0 K K2 Regra – pontos de entrada e saída do eixo real o sistema em cadeia fechada é estável • Para K=K2 o sistema é marginalmente estável • Usar o root-locus • Usar o critério de Routh-Hurwitz • Para K>K1 o sistema apresenta uma sobreelevação na resposta ao escalão. • Qual é o valor aproximado de K que conduz a uma sobreelevação de 20% ? 18/Cap.7 M. Isabel Ribeiro, António Pascoal • Qual é o valor de K2 ? ROOT LOCUS Regras para a construção KG(s)H(s) K s(s 1)(s 2) Exemplos s2 j K2 x 3 x 2 x 1 • seja s2 o ponto de cruzamento com o eixo imaginário s2 pertence ao root-locus a condição de argumento é satisfeita para s2 arg(KG(s2 )H(s2 )) (2k 1) 2 s2 j 2 a condição de módulo é satisfeita para s2 KG( j)H( j) 1 K2 1 G( j 2 ) H ( j 2 ) 1 1 1 2 4 2 1 2 4 2 19/Cap.7 M. Isabel Ribeiro, António Pascoal arg(KG(s2 )H(s2 )) 1 2 3 90º arctg() arctg( ) 2 (2k 1) ROOT LOCUS Regras para a construção Exemplos KG(s)H(s) num=[1 7 12]; den=[1 3 2]; rlocus(num,den); axis([-5 1 -1.5 1.5]); o x o K(s 3)(s 4) (s 1)(s 2) x K1=? K2=? x K( s 3 ) s(s 1)(s 2)(s 4) o x x x M. Isabel Ribeiro, António Pascoal KG(s)H(s) 20/Cap.7 ROOT LOCUS Regras para a construção • REGRA 6 – Pontos de entrada e de saída do eixo real Ponto de entrada no eixo real = break-in point Ponto de saída do eixo real = breakaway point o o x x break-in point x o x x x breakaway point • O ponto de saída do eixo real ocorre para um máximo relativo do ganho menor valor de K que já conduz a pólos reais M. Isabel Ribeiro, António Pascoal • O ponto de entrada no eixo real ocorre para um mínimo relativo do ganho maior valor de K que ainda conduz a pólos reais 21/Cap.7 ROOT LOCUS Regras para a construção REGRA 6 – Pontos de entrada e de saída do eixo real K s(s 1) K K1 > KG(s)H(s) K K1 ? > • x > máximo relativo x -1 > todos os s do root-locus satisfazem 1 K 1 0 s(s 1) K s(s 1) dK 2s 1 0 ds s1 2 K 1 4 breakaway point valor do ganho correspondente ao breakaway point • equidistante dos dois pólos da f.t.c.a. • analogia com um sistema de cargas eléctricas • repulsão pelos pólos • atracção pelos zeros 22/Cap.7 M. Isabel Ribeiro, António Pascoal cálculo do máximo relativo ROOT LOCUS Regras para a construção • REGRA 6 – Pontos de entrada e de saída do eixo real equação característica 1 KG(s)H(s) 0 Para s e s Root Locus 1 KG()H() 0 K 1 G()H() cáculo de máximos e mínimos relativos dK 0 d todos os pontos de saída/entrada no eixo real satisfazem esta relação nem todas as soluções desta equação são sempre pontos de saída ou de entrada no eixo real é preciso confirmar se as soluções encontradas estão sobre troços que pertencem ao root-locus Valores (do eixo real) dos pontos do root-locus que são breakaway e break-in points Os valores correspondentes de K 23/Cap.7 M. Isabel Ribeiro, António Pascoal condição necessária mas não suficiente ROOT LOCUS Regras para a construção REGRA 6 – Pontos de entrada e de saída do eixo real KG(s)H(s) Exemplos x s2 1 KG(s)H(s) 1 K x o K(s 3)(s 5) (s 1)(s 2) s1 o (s 3)(s 5) 0 (s 1)(s 2) (s 1)(s 2) K(s 3)(s 5) 0 K (s 1)(s 2) (s 3)(s 5) break-in point dK (11s2 26s 61) 0 ds (s 8s 15)2 s1 3.81 s2 1.45 K1 ? K2 ? breakaway point 24/Cap.7 M. Isabel Ribeiro, António Pascoal • ROOT LOCUS Regras para a construção REGRA 7 – Ângulos de partida e de chegada ao eixo real a = nº de ramos que se cruzam num ponto do eixo real • O ângulo entre dois ramos adjacentes que se aproximam (ou que se afastam) do mesmo ponto do eixo real é dado por: 360º a • O ângulo entre dois ramos adjacentes, um chegando e outro partindo do mesmo ponto do eixo real é dado por: Exemplos o o x x 180º a x o x x x M. Isabel Ribeiro, António Pascoal • 25/Cap.7 ROOT LOCUS Regras para a construção REGRA 7 – Ângulos de partida e de chegada ao eixo real Exemplos x > > x > x M. Isabel Ribeiro, António Pascoal x > • 26/Cap.7 ROOT LOCUS Regras para a construção • REGRA 8 – Comportamento assimptótico ângulo das assímptotas com o eixo real centro assimptótico • Quando K n-m ramos tendem para infinito ao longo de assímptotas n-m assímptotas • As assímptotas cruzam-se num ponto do eixo real (centro assimptótico) a n m i1 i1 pólos de G(s)H(s) zeros de G(s)H(s) nm • O ângulo das assímptotas com o eixo real é dado por (2k 1) , k 0, 1, 2,..., n m 1 nm M. Isabel Ribeiro, António Pascoal a 27/Cap.7 ROOT LOCUS Regras para a construção • REGRA 8 – Comportamento assimptótico ângulo das assímptotas com o eixo real - demonstração • O ângulo das assímptotas com o eixo real é dado por a Demonstração: (2k 1) , k 0, 1, 2,..., n m 1 nm Para referência. Leitura opcional m KG(s)H(s) KK (s z ) i i1 1 n (s p ) i i1 KG(s)H(s) Como s pertence ao Root-Locus condição de módulo condição de argumento K K1 s n m KG(s)H(s) K K1 1 s n m KK 1 snm M. Isabel Ribeiro, António Pascoal s arg(KK1) arg(snm ) arg(KK1 ) (n m) arg(s) Para K>0 e K1>0 (2k 1) (n m) arg(s) arg(s) (2k 1) (n m) 28/Cap.7 ROOT LOCUS Regras para a construção • REGRA 8 – Comportamento assimptótico ângulo das assímptotas com o eixo real centro assimptótico Exemplos KG(s)H(s) K s(s 1)(s 2) 3 ramos, todos a terminar em infinito 3 assímptotas ângulos das assímptotas com o eixo real a (2k 1) , k 0, 1, 2,..., n m 1 nm 60º ,180º ,60º centro assímptótico m i1 i1 pólos de G(s)H(s) zeros de G(s)H(s) nm 1 60º x x M. Isabel Ribeiro, António Pascoal a n x 29/Cap.7 ROOT LOCUS Root-Locus - Exemplo KG(s)H(s) • • • • K(s 1) s(s 1)(s 6) 3 ramos 2 ramos a terminar no infinito = 2 assímptotas Ângulo das assímptotas com o eixo real= 90º, -90º Centro assimptótico a (0 1 6) ( 1) 2 3 1 ? ? • x x M. Isabel Ribeiro, António Pascoal o x Ponto de saída do eixo real s(s - 1)(s 6) s 1 3 2 dK 2s 8s 10s 6 0 ds (s 1)2 1 KG(s)H(s) 0 K - 30/Cap.7 ROOT LOCUS Root-Locus – Exemplo (cont) • Ponto de saída do eixo real 1 KG(s)H(s) 0 K - s(s - 1)(s 6) s 1 dK 2s3 8s2 10s 6 0 ds (s 1)2 s1,2 2.22 j1.42 s3 0.43 breakaway point Não pertencem ao root-locus Não podem ser pontos de saída de ramos do eixo real Calcule o ganho correspondente Ponto de cruzamento com o eixo imaginário e ganho correspondente • • Método 1 – critério de Routh-Hurwitz Método 2 – Root-Locus • • Ponto de cruzamento - Condição de ângulo Ganho correspondente – Condição de módulo eq.característica s3 5s2 (K 6)s K 0 s(s 1)(s 6) K(s 1) 0 a K K 5(K 6) 5 30 a0 4 linha de zeros s j 3 2 s3 1 K6 s2 5 K s1 a 0 s0 K Q(s) 5s2 30 0 4 31/Cap.7 M. Isabel Ribeiro, António Pascoal • ROOT LOCUS Root-Locus – Exemplo (cont) • Ponto de cruzamento com o eixo imaginário e ganho correspondente • • Método 1 – critério de Routh-Hurwitz Método 2 – Root-Locus • • Ponto de cruzamento - Condição de ângulo Ganho correspondente – Condição de módulo KG(s)H(s) K(s 1) s(s 1)(s 6) s1 ja1 o x x x condição de argumento a1 3 2 s1 j 3 2 condição de módulo tg(α β) tga tg 1 tga .tg K? E para este valor de K qual é o pólo real em cadeia fechada? 32/Cap.7 M. Isabel Ribeiro, António Pascoal arg(G(s1 )H(s1 )) arctg(a1 ) 180 arctg(a1 ) 90º arctg(a1 ) 6 ROOT LOCUS Regras para a construção REGRA 9 – Soma dos pólos G(s)H(s) grau N(s) = m grau D(s) = n n n i1 i1 pólos da f.t.c.a pólos da f.t.c.f, Se n-m 2 Se n-m 2 N(s) D(s) K Soma dos pólos em cadeia aberta = Soma dos pólos em cadeia fechada Demonstração: Para referência. Leitura Opcional cadeia aberta G(s)H(s) N(s) N(s) n n1 D(s) s r1s r2sn2 .... rn n1 s r1s n n2 r2s n .... rn (s i ) i1 n r1 i i i1 pólo da f.t.c.a. cadeia fechada 1 K 1 KG(s)H(s) 0 N(s) 0 sn r1sn1 r2sn2 .... rn sn r1sn1 r2sn2 .... rn K N(s) 0 n1 s d1s n n2 d2s n .... dn 0 (s pi ) i1 n d1 pi i1 pi pólo da f.t.c.f. n Se n-m 2 d1 r1 n p i1 i i1 i 33/Cap.7 M. Isabel Ribeiro, António Pascoal • ROOT LOCUS Regras para a construção • REGRA 9 – Soma dos pólos Exemplos KG(s)H(s) K(s 1) s(s 1)(s 6) s j 3 2 K 7 .5 ? x o x x x Para K=7.5 onde está o outro pólo da f.t.c.f ? 3 i1 i1 pólos da f.t.c.a pólos da f.t.c.f, K M. Isabel Ribeiro, António Pascoal 3 (0 1 6) j 3 j 3 p3 2 2 p3 5 34/Cap.7 ROOT LOCUS Regras para a construção REGRA 10 – Ângulo de partida de um pólo e de chegada a um zero Exemplos KG(s)H(s) K(s 2) s(s 4)[(s 4)2 42 ] só troços do eixo real x x o x x centro assimptótico (0 4 4 4 j 4 4 j) ( 2) 10 3 4 1 M. Isabel Ribeiro, António Pascoal a ângulos das assimptotas com o eixo real = 60º, 180º,-60º Como saem os ramos dos pólos complexos conjugados? usar a condição de argumento 35/Cap.7 ROOT LOCUS Regras para a construção REGRA 10 – Ângulo de partida de um pólo e de chegada a um zero Exemplos K(s 2) s(s 4)[(s 4)2 42 ] s1 – que se admite pertencente ao root-locus só troços do eixo real Circunferência de raio e e0 5 x x x 3 o 1 x 2 4 arg(G(s1)H(s1)) 1 (2 3 4 5 ) arg(G(s1)H(s1)) (180 arctg2) (135º90º90º5 ) (2k 1) incógnita 5 18.4º 36/Cap.7 M. Isabel Ribeiro, António Pascoal KG(s)H(s) ROOT LOCUS Regras para a construção REGRA 10 – Ângulo de partida de um pólo e de chegada a um zero Exemplos K(s 2) s(s 4)[(s 4)2 42 ] -18.5º M. Isabel Ribeiro, António Pascoal KG(s)H(s) 37/Cap.7 ROOT LOCUS Root-Locus – Exemplo 1 KG(s)H(s) K s(s 2)[(s 1)2 4] centro assimptótico 0 2 1 2j 1 2 j a 1 4 ângulo das assímptotas com o eixo real ass (2k 1) 4 ass 45º ,135º ,225º ,45º breakaway points K (s4 4s3 9s2 10s) dK ( 4s3 12s2 18s 10) 0 ds s 1 s 1 j1.25 K? s 1 j1.25 x > > breakaway point > x > > M. Isabel Ribeiro, António Pascoal > x x INSTITUTO SUPERIOR TÉCNICO- Controlo – 2006/2007 38/Cap.7 ROOT LOCUS Root-Locus – Exemplo 1 KG(s)H(s) K s(s 2)[(s 1)2 4] breakaway points K (s4 4s3 9s2 10s) dK ( 4s3 12s2 18s 10) 0 ds s 1 s 1 j1.25 K=4 K=? s 1 j1.25 K=4 M. Isabel Ribeiro, António Pascoal breakaway point 39/Cap.7 ROOT LOCUS Root-Locus – Exemplo 2 KG(s)H(s) K s(s 8)[(s 4)2 1] centro assimptótico 084 j4 j a 4 4 ângulo das assímptotas com o eixo real ass (2k 1) 4 ass 45º ,135º ,225º ,45º breakaway points K (s4 16s3 81s2 136s) s 6.74 s 4 s 1.26 K? K 16 K? < M. Isabel Ribeiro, António Pascoal < < < < dK ( 4s3 48s2 162s 136) 0 ds 40/Cap.7 < ROOT LOCUS Root-Locus – Exemplo 2 KG(s)H(s) K s(s 8)[(s 4)2 1] breakaway points K (s4 16s3 81s2 136s) breakaway point s 6.74 s 4 s 1.26 K? K 16 K? M. Isabel Ribeiro, António Pascoal dK ( 4s3 48s2 162s 136) 0 ds breakaway point break-in point 41/Cap.7 ROOT LOCUS Root-Locus – Exemplo 3 K[(s 1.5)2 12 ] KG(s)H(s) 2 s (s 0.5)(s 8)(s 9) centro assimptótico (0 0.5 8 9) ( 1.5 j 1.5 j) a 4.83 52 ângulo das assímptotas com o eixo real ass (2k 1) 3 ass 60º ,180º ,60º estabilidade 0 K K1 instável K K1, K K 2 marginalme nte estável K1 K K 2 estável K K 2 instável K2 K1 o x x xx o M. Isabel Ribeiro, António Pascoal x 42/Cap.7 ROOT LOCUS Root-Locus vs qualquer parâmetro R(s) + - K 1 s 1 1 s C(s) k2 + + Pergunta: Para K fixo, como é que os pólos da f.t.c.f. variam com k2 ? K5 5 C(s) s(s 1) R(s) 1 5 (1 k s) 2 s(s 1) C(s) 5 2 R(s) s s(1 5k 2 ) 5 Pergunta: Pode usar-se o Root-Locus ? s2 s(1 5k 2 ) 5 0 (s2 s 5) k 2 5s 0 Root-locus como função de k2 1 k 2 M. Isabel Ribeiro, António Pascoal x 5s 0 s2 s 5 o x 43/Cap.7 ROOT LOCUS Root-Locus para Ganhos Negativos R(s) + G(s) K C(s) K0 _ H(s) Equação característica 1 KG(s)H(s) 0 KG(s)H(s) 1 Condição de módulo KG(s)H(s) 1 é independente do sinal de K Condição de argumento arg(G(s)H(s)) 2k, k Z Apenas são alteradas as regras nas quais intervém a condição de argumento • troços do eixo real pertencem ao root-locus se tiverem à direita um número par de pólos e/ou zeros da f.t.c.a. 2k • ângulo das assímptotas com eixo real= a n m , k 0,1,...,n m 1 • os ângulos de partida e chegada satisfazem a nova condição de argumento e diferem, portanto, de 180º dos calculados para K positivo. 44/Cap.7 M. Isabel Ribeiro, António Pascoal Regras que são alteradas ROOT LOCUS Root-Locus para K negativo Exemplo R(s) + C(s) K 2 s(s 2s 2) _ retroacção negativa Root-locus Root-locus • retroacção negativa • K>0 • retroacção positiva • K<0 K<0 K>0 > > x x > > M. Isabel Ribeiro, António Pascoal x 45/Cap.7 Cancelamento pólo-zero no Root-Locus R(s) + - s2 s 1 K ROOT LOCUS C(s) 1 s a + + Root-Locus como função de K R(s) + - K G(s) s2 s 1 1 s C(s) 1 sa H(s) KG(s)H(s) K s2 (as 1) s(s 1) Para a 1 H(s) tem um zero igual a um pólo de G(s) Se houver cancelamento KG(s)H(s) K s2 s Root-Locus tem um único ramo o x 46/Cap.7 M. Isabel Ribeiro, António Pascoal Pode cancelar-se ? Cancelamento pólo-zero no Root-Locus f.t.c.a. f.t.c.f. KG(s)H(s) K ROOT LOCUS s2 (as 1) s(s 1) s2 C(s) KG(s) s(s 1) R(s) 1 KG(s)H(s) 1 K s 2 (s 1) s(s 1) K K (s 2) C(s) K(s 2) 1 K 2K R(s) (s 1)[(1 K )s 2K ] (s 1) s 1 K Pólo fixo independente de K não é zero da f.t.c.f o x x x Pólo da f.t.c.f. independente de K x Pólo da f.t.c.f. Para a 1 H(s) tem um zero igual a um pólo de G(s) Pode cancelar-se ? NÃO 47/Cap.7 M. Isabel Ribeiro, António Pascoal o -2
Baixar