Algumas Superfícies Notáveis em
Espaços Não-Euclidianos
Ion Moutinho Gonçalves
Universidade Federal Fluminense
3o Colóquio da Região Nordeste
Setembro de 2014
Sumário
1
Decompondo o espaço R3 em dois fatores
1.1 O espaço Euclidiano . . . . . . . . . . . . .
1.2 O sistema de coordenadas esféricas no R3 .
1.3 O sistema de coordenadas cilíndricas no R3
1.4 Feixes . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
3
3
6
7
9
2 O estudo da Geometria Hiperbólica por meio de um modelo
2.1 Geometria Hiperbólica . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Um modelo de Espaço Hiperbólico . . . . . . . . . . . . . . . . . . . . . .
2.3 Outros sistemas de coordenadas em H . . . . . . . . . . . . . . . . . . . .
13
13
13
20
3 Algumas superfícies notáveis do Espaço Hiperbólico
3.1 Algumas superfícies do R3 generalizadas para H . . . . . . . . . . . . . .
25
25
4 O Espaço Esférico
4.1 Um modelo de Espaço Esférico . . . . . . . . . . . . . . . . . . . . . . . .
4.2 As coordenadas esféricas e cilíndricas em S3 . . . . . . . . . . . . . . . .
31
31
32
5 Continuando o estudo
5.1 A noção de distância nos espaços não-euclidianos . . . . . . . . . . . . .
5.2 O Cálculo Diferencial para o estudo das formas em H . . . . . . . . . . .
5.3 Produto warped . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
35
36
38
Referências Bibliográficas
41
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Introdução
Este texto é para um minicurso sobre espaços geométricos, de dimensão 3, nãoeuclidianos, o Espaço Hiperbólico e o Esférico. Destacamos em primeiro lugar que
a abordagem que será adotada aqui é baseada no uso de modelos, isto é, não vamos
estruturar as definições e propriedades por meio de uma apresentação axiomática. Em
particular, não vamos fazer uso sistemático de um estudo axiomático. Contudo, não
estamos impedidos de fazer uso de resultados das teorias de Geometria. Vejamos,
agora, esta questão em mais detalhes.
Adotamos um modelo para o Espaço Hiperbólico e outro para o Esférico. Estes
modelos dependerão de conhecimentos sobre o espaço euclidiano Rn , onde R
representa o conjunto dos números reais. Assim, nossa base de conhecimento é o
conjunto Rn como modelo de espaço euclidiano, isto é, de espaço vetorial normado,
com a norma proveniente de um produto interno, e de dimensão finita. Ao contrário
do que acontece num estudo axiomático e abstrato, quando não importa o que são os
objetos envolvidos, qual é a natureza destes, e só o que interessa são as propriedades
assumidas para os objetos, os axiomas da teoria, em um estudo baseado num modelo
os objetos de estudo são explicitamente descritos e as propriedades devem, ou
melhor, podem ser deduzidas a partir de conhecimentos da natureza destes objetos.
Por exemplo, num modelo, propriedades, que num estudo axiomático são apenas
postuladas, podem ser provadas. Este tipo de estudo tem a grande vantagem de, na
hora de justificar um resultado de interesse, não depender de muitos conhecimentos
da teoria ou de grande habilidade na dedução de resultados intermediários. Por
outro lado, não estamos impedidos de fazer uso de eventuais propriedades que
conheçamos por meio do estudo axiomático das Geometrias, elaborando argumentos
lógico-dedutivos exclusivamente baseados nos axiomas e resultados já conhecidos da
teoria estudada, a Geometria Hiperbólica ou a Geometria Esférica. Um exemplo na
Geometria Euclidiana plana, suponhamos que precisemos mostrar que três pontos do
R2 são vértices de um triângulo retângulo. Podemos determinar equações para as
retas que contém cada par de ponto e analisar o ângulo entre elas. Ou, podemos usar o
teorema de Pitágoras para triângulo retângulo válido para a Geometria Euclidiana. Se
verificarmos a relação entre as distâncias, de acordo com o teorema, temos que os três
pontos indicam um triângulo retângulo. Aliás, o quanto podemos usar de resultados
de um estudo axiomático vai depender da habilidade e conhecimento de cada um de
nós.
A proposta aqui é desenvolver um estudo mesclado, ora usando argumentos
baseados nas relações explícitas entre os objetos do modelo, ora usando argumentos
lógico-dedutivos exclusivamente baseados nos axiomas e resultados básicos da
Geometria Hiperbólica, ou Esférica. Um estudo assim, no caso euclidiano, é conhecido
1
2
como Geometria Analítica. Assim, considerando um modelo de Espaço Hiperbólico e
de Espaço Esférico, podemos seguir uma teoria que bem poderia se chamar Geometria
Hiperbólica Analítica e Geometria Esférica Analítica.
O objetivo deste curso, além de apresentar um estudo analítico dos Espaços
Hiperbólico e Esférico, é introduzir uma noção de decomposição nestes espaços. Esta
não é uma tarefa imediata, pois os espaços não-euclidianos não possuem retângulos,
isto é, não admitem duas famílias ortogonais formadas por retas ou planos paralelos
entre si. Com o objetivo de buscar decomposições para espaços não-Euclidianos
vamos estudar uma generalização das coordenadas esféricas e cilíndricas do R3 . Como
aplicação deste estudo, vamos utilizar as decomposições como um critério para a
criação de algumas superfícies bastante estudadas no espaço euclidiano, a saber, cones,
cilindros e superfícies de rotação. Neste sentido, o Espaço Hiperbólico apresenta
surpresas interessantes.
É importante destacar também que este texto não segue a abordagem matemática
tradicional da busca por teoremas. O objetivo principal aqui é conhecer e manipular
novos objetos, normalmente desconsiderados nos estudos tradicionais de Geometria.
Temos, por outro lado, a pretensão de deixar questões de investigação, no caso do leitor
desenvolver estudos na área de Geometria diferencial.
Os assuntos abordados neste texto são também uma apresentação elementar de
objetos que são temas de pesquisas matemáticas recentes na área de Geometria
Diferencial.
Capítulo 1
Decompondo o espaço R3 em dois
fatores
A introdução de novos sistemas de coordenadas em regiões do espaço R3 tem por
finalidade simplificar a descrição de certos conjuntos ou funções. Vamos apresentar
algumas definições relacionadas a este conceito a fim de estudar alguns subconjuntos
especiais, a saber, superfícies do tipo de rotação, cone e cilindro.
1.1
O espaço Euclidiano
O conjunto R3 = {( x, y, z) : x, y, z ∈ R} se torna um espaço vetorial de dimensão 3
quando é munido das operações naturais de adição de vetores e de multiplicação de
vetor por escalar. O espaço vetorial R3 é chamado espaço euclidiano quando é munido
também do produto interno usual.
Notações:
• o símbolo + denota a soma usual de vetores do R3 :
( x, y, z) + ( a, b, c) = ( x + a, y + b, z + c), para todos ( x, y, z), ( a, b, c) ∈ R3 ;
• o símbolo . denota o produto usual de um vetor por um escalar:
a.( x, y, z) = ( ax, ay, az), para todos a ∈ R e ( x, y, z) ∈ R3 ;
• a notação h, i é usada para o produto interno usual do R3 :
h( x, y, z), ( a, b, c)i = xa + yb + zc, para todos ( x, y, z), ( a, b, c) ∈ R3 ;
• a notação k k é usada para a norma euclidiana, proveniente do produto interno:
p
k( x, y, z)k = x2 + y2 + x2 , para todos ( x, y, z) ∈ R3 .
Quando munido destas operações, o R3 vira um modelo de Espaço Euclidiano.
Agora, a partir destes elementos, e com a construção de outros, como o conceito de
ângulo, temos que o R3 pode ser visto como um modelo da Geometria Espacial de
Euclides. Dependendo da forma como interpretamos os objetos relacionados com o
3
4
Capítulo 1: Decompondo o espaço R3 em dois fatores
R3 , podemos chamá-los de modo diferente. Assim, podemos usar tanto o termo vetor
quanto o termo ponto para os elementos de R3 , dependendo do contexto.
Por ter dimensão 3, os pontos do espaço R3 podem ser determinados através de
3 coordenadas formadas por números reais. Dada uma base {u1 , u2 , u3 } de R3 , todo
vetor u ∈ R3 pode ser escrito como combinação linear da base dada,
u = xu1 + yu2 + zu3 , com x, y, z ∈ R3 .
Os valores obtidos, x, y, z ∈ R3 , são chamados coordenadas na base {u1 , u2 , u3 }. As
coordenadas de um vetor na base canônica, {(1, 0, 0), (0, 1, 0), (0, 0, 1)}, são conhecidas
como coordenadas cartesianas, e coincidem com as próprias coordenadas de definição
dos objetos elementos de R3 .
A determinação dos elementos de R3 através de um sistema de coordenadas numa
base fixada pode ser visto como uma aplicação
( x, y, z) ∈ R3 7→ xu1 + yu2 + zu3 ∈ R3 .
De modo bem mais geral, vamos chamar toda aplicação bijetiva entre subconjuntos de
R3 de um sistema de coordenadas (local) em R3 . Com esta definição, incluímos exemplos
como as coordenadas esféricas e cilíndricas, exemplos que serão relembrados logo a
seguir.
A ideia de um sistema de coordenadas de R3 é, a princípio, descrever pontos do
conjunto em função de ternos de números reais, o que pode ser visto como uma forma
de decompor o espaço euclidiano em 3 fatores de dimensão 1, R × R × R. Agora,
podemos ver se não é interessante tentar decompor R3 em dois fatores. Neste caso,
temos um fator de dimensão 1 e outro de dimensão 2. Vejamos um exemplo para
ilustrar um pouco melhor esta ideia.
Exemplo: (decomposição ortogonal do R3 em dois fatores) Seja π um plano do R3 que
passe pela origem e seja r uma reta ortogonal a π, também passando pela origem de
R3 . A aplicação
( x, y) ∈ π × r 7→ x + y ∈ R3
descreve pontos do R3 em função de duas coordenadas, uma dada pelos elementos de
π, espaço de dimensão 2, e outra pelos elementos de r, espaço de dimensão 1. Este
sistema de coordenadas determina uma representação do R3 como produto do plano
π pela reta r.
1.1: O espaço Euclidiano
5
Um exemplo de aplicação deste sistema de coordenadas é a descrição da
transformação reflexão com relação ao plano π que, neste sistema, fica bem
simplificada. De fato, quando o R3 é representado como o produto de π por r, a
transformação reflexão é expressa por
( x, y) ∈ π × r 7→ ( x, −y) ∈ π × r.
Este tipo de sistema de coordenadas também é útil para a descrição de um
subconjunto especial, a saber, as superfícies cilíndricas. Vamos apresentar uma descrição
paramétrica para este tipo de conjunto.
Seja α : I ⊂ R → π ⊂ R3 uma curva. Então, a aplicação
(s, t) ∈ I × r 7→ (α(s), t) ∈ π × r
representa um cilindro sobre a curva α.
Exercício: A aplicação, f (s, t) = (2s2 + s − t, s2 + s + t, s2 − s + 2t), parametriza um
cilindro. Encontre a decomposição ortogonal do espaço em dois fatores que permita
obter uma parametrização do cilindro como no exemplo anterior.
Exercício: Encontre, se possível, outros objetos e transformações do espaço cuja
expressão em função de uma decomposição ortogonal em dois fatores fique
simplificada.
Capítulo 1: Decompondo o espaço R3 em dois fatores
6
1.2
O sistema de coordenadas esféricas no R3
Outro sistema de três parâmetros muito usado para descrever pontos do espaço
é o sistema que considera a distância de um ponto dado à origem e a sua direção
no espaço, conhecido como sistema de coordenadas esféricas. Mais precisamente, dado
p ∈ R3 − (0, 0, 0), se ρ > 0 é a distância de p à origem e se θ ∈ [0, π ) e σ ∈ [0, 2π )
são os parâmetros que determinam a direção de p, representando a colatitude, isto é, o
ângulo que o vetor p faz com o eixo z, e representando a longitude, isto é, o ângulo que a
projeção de p sobre o plano xy faz com o eixo x, respectivamente, então as coordenadas
esféricas de p são representadas por (ρ, θ, σ ). Neste caso, as coordenadas cartesianas
de p, ( x, y, z), são expressas em função das coordenadas esféricas pelas relações
R3
x = ρ sin(θ ) cos(σ )
y = ρ sin(θ ) sin(σ ).
z = ρ cos(σ )
Em linguagem vetorial, temos
( x, y, z) = ρ(sin(θ ). cos(σ), sin(θ ). sin(σ), cos(σ)).
Note
que (sin(θ ). cos(σ ), sin(θ ). sin(σ ), cos(σ )) é um ponto da esfera
(verifique)
3
= u ∈ R : kuk = 1 . Às vezes, um problema envolvendo coordenadas esféricas
não exige que se mencione explicitamente os parâmetros θ e σ. Neste caso, a expressão
de um ponto ( x, y, z) de R3 em coordenadas esféricas pode ser simplificada para
S2
( x, y, z) = ρu, onde ρ > 0 e u ∈ S2 .
Em particular, a expressão fornece uma decomposição do R3 − (0, 0, 0) como produto
de dois fatores, ρ ∈ (0, +∞) e u ∈ S2 (o primeiro fator pertence a um espaço de
dimensão 1 e o segundo pertence a um espaço de dimensão 2). Em resumo, a aplicação,
(ρ, u) ∈ (0, +∞) × S2 7→ ρu ∈ R3 − (0, 0, 0),
define um sistema de coordenadas sobre R3 − (0, 0, 0), chamado também de
coordenadas esféricas, que representa o espaço como um produto de uma semirreta por
uma esfera.
Exemplo: A equação da esfera de centro em (0, 0, 0) e raio r é dada, em coordenadas
esféricas, por ρ = r. De fato, a expressão ρ = r significa que o parâmetro ρ é fixado e o
parâmetro u ∈ S2 varia livremente, ou seja, todo ponto que satisfaça à equação ρ = r
tem que ter a norma fixada, mas pode variar a direção, o que permite descrever todos
os pontos da esfera de raio r.
Exemplo: A equação da semirreta de R3 que parte da origem e passa por um ponto a,
em coordenadas esféricas, é da forma u = k aak (vetor unitário). De fato, um ponto de
R3 da forma p = ρu, com u =
a
k ak
, só tem o parâmetro ρ livre, ou seja, só pode variar
1.3: O sistema de coordenadas cilíndricas no R3
7
o seu comprimento, enquanto que a direção fica constante. Como ρ > 0, tais pontos
estão sobre uma semirreta.
Exemplo: (descrição paramétrica de um cone) Um cone é uma figura geométrica
formada por um feixe de semirretas com origem em um ponto do espaço e que passam
por uma curva. Por exemplo, se α : I ⊂ R → R3 é uma curva então a aplicação
(s, t) ∈ (0, +∞) × I 7→ sα(t) ∈ R3
parametriza o cone gerado pela curva α com vértice na origem.
A escolha arbitrária de uma curva α para descrever um cone pode não ser uma
boa opção. Por exemplo, o conhecimento de α pode ainda não deixar claro como é
o formato do cone. Só para ilustrar, poderíamos ter α parametrizando um círculo no
espaço sem que o cone seja reto e de base circular. Além disso, as curvas coordenadas,
s = constante e t = constante, podem não ser ortogonais.
Uma maneira ótima de descrever um cone a partir de uma curva é considerar
que a curva α é tal que kα(t)k = 1 para todo t ∈ I, ou seja, α é uma curva da
forma α : I ⊂ R → S2 . Neste caso, as coordenadas esféricas servem para uma boa
parametrização. Em coordenadas esféricas, temos
(s, t) ∈ (0, +∞) × I 7→ (s, α(t)) ∈ (0, +∞) × S2 .
1.3
O sistema de coordenadas cilíndricas no R3
Outro sistema de coordenadas que fornece uma decomposição do espaço em dois
fatores é o sistema de coordenadas cilíndricas,
( x, ρ, θ ) ∈ R × (0, +∞) × [0, 2π ) 7→ ( x, ρ cos(θ ), ρ sin(θ )) ∈ R3 − {( x, 0, 0) : x ∈ R} .
2 denotar o semiplano ( t , t ) ∈ R2 : t > 0 e S1 denotar o círculo
Agora,
fazendo
R
2
2
1
+
x ∈ R2 : k x k = 1 , a aplicação acima pode ser revista como a seguinte decomposição
8
Capítulo 1: Decompondo o espaço R3 em dois fatores
(t1 , t2 , x ) ∈ R2+ × S1 7→ (t1 , t2 x ) ∈ R × R2 ≈ R3 .
Exemplo: Considere a decomposição do R3 como produto de um semiplano por um
círculo, obtida através do sistema de coordenadas cilíndricas, e seja α : I → R2+ uma
curva. Então, a aplicação
(t, x ) ∈ I × S1 7→ (α(t), x ) ∈ R2+ × S1
representa a superfície de rotação gerada pela curva α. De outra forma, quando o R3
está decomposto como o produto de um semiplano por um círculo, segundo o sistema
de coordenadas cilíndricas, uma superfície de rotação do espaço é o produto de uma
curva do semiplano com o círculo e é parametrizada pela parametrização da curva
vezes a identidade do círculo.
As curvas coordenadas, t 7→ (α(t), x0 ) ∈ R2+ × S1 e x 7→ (α(t0 ), x ) ∈ R2+ S1 ,
parametrizam, respectivamente, os meridianos e os paralelos da superfície de rotação.
1.4: Feixes
9
O objetivo, neste texto, para a definição dos sistemas de coordenadas estabelecidos
aqui é bem simples, é simplesmente o de estabelecer uma maneira de representar
as superfícies discutidas nos exemplos, cilindros, cones e de rotação. Por exemplo,
se consideramos um sistema de coordenadas, ϕ : R2+ × S1 → R3 , a aplicação,
f : I × S1 7→ R2+ × S1 , f (t, x ) = (α(t), x ), deve ser reconhecida como uma superfície
de rotação. Essa notação será muito útil quando buscarmos um estudo análogo sobre
superfícies nos espaços hiperbólico e esférico.
Cabe chamar a atenção do leitor para o fato de que é possível, e muito
útil, desenvolver conhecimentos matemáticos relacionados com os sistemas de
coordenadas que estamos vendo aqui. Contudo, isso exigiria conhecimentos que ainda
não estamos assumindo no texto.
Exercício: Defina um sistema de coordenadas cilíndricas em R4 do tipo R2+ × S2 e
utilize-o para definir uma noção hipersuperfície de rotação em R4 . Neste caso, qual
é a dimensão dos meridianos e dos paralelos? Qual é a natureza dos meridianos? E
dos paralelos? Você também pode definir outro sistema de coordenadas cilíndricas em
R4 agora do tipo R3+ × S1 . Utilize-o para definir mais uma noção de hipersuperfície
de rotação R4 . Como fica a dimensão dos meridianos e dos paralelos neste novo caso?
Qual é a natureza dos meridianos? E dos paralelos?
1.4
Feixes
Podemos definir sistemas de coordenadas a partir das aplicações mais variadas.
Contudo, os exemplos vistos até agora podem ser colocados dentro de um único ponto
de vista, desenvolvido a partir do conceito de feixe, de retas e semirretas e de planos e
semiplanos.
Um feixe de semirretas com origem p é o conjunto das semirretas com origem no
ponto p. Vamos também considerar a noção de feixe de retas paralelas, o conjunto das
retas paralelas a uma reta dada. De modo análogo se define feixe de semilplanos e feixe
de planos paralelos.
Antes de analisarmos os referidos sistemas de coordenadas de R3 do ponto de
vista de feixes, vamos fazer algumas observações sobre uma versão planar da questão,
vamos falar sobre o sistema de coordenadas polares do R2 . Uma forma de descrever o
10
Capítulo 1: Decompondo o espaço R3 em dois fatores
sistema de coordenadas polares é considerá-lo como a aplicação
(ρ, u) ∈ (0, +∞) × S1 7→ ρu ∈ R2 − {(0, 0)} ,
onde S1 = u ∈ R2 : kuk = 1 . Este sistema de coordenadas induz uma decomposição
do plano num produto de uma semirreta por um círculo. Note que todo vetor u ∈ S1
pode ser escrito da forma u = (cos(θ ), sin(θ )) e a aplicação acima se escreve em
coordenadas como
(ρ, θ ) 7→ (ρ cos(θ ), ρ sin(θ )),
forma que talvez o leitor esteja mais acostumado.
As curvas coordenadas do sistema de coordenadas polares são as curvas u =
constante, que formam um feixe de semirretas com origem (0, 0), e as curvas ρ =
constante, que formam os círculos de centro (0, 0).
Note que as coordenadas polares formam um sistema no qual a rede de curvas
coordenadas é tal que elas se interceptam ortogonalmente. Note também que esta é a
única maneira de se obter um sistema de coordenadas cuja rede de curvas coordenadas
é formada por um feixe de semirretas com origem num ponto e por uma família de
curvas ortogonais a este feixe. De fato, a única família de curvas ortogonais a um feixe
de semirretas é a família de curvas formadas por círculos concêntricos e com centro na
origem do feixe.
Uma variação deste tipo de construção ocorre quando fazemos a origem do feixe
de semirretas se deslocar, na direção do eixo y, para o infinito. Neste caso, o feixe de
semirretas se transforma num feixe de retas paralelas e a família de círculos, sempre
ortogonal ao feixe, muda para um outro feixe de retas paralelas, ortogonal ao feixe
limite. Ou seja, o sistema de coordenadas cartesianas aparece como um caso limite de
sistemas de coordenadas polares.
Como foi dito no início desta seção, podemos expressar o espaço R3 em termos
dos mais variados tipos de sistemas de coordenadas. Entretanto, se quisermos definir
um sistema de coordenadas no espaço que o decomponha em dois fatores e que seja
descrito em termos de feixes de retas e semirretas, ou de planos e semiplanos, e de
1.4: Feixes
11
famílias de superfícies, ou de curvas, ortogonais ao feixe, as possibilidades se reduzem
aos sistemas já vistos aqui, de coordenadas esféricas, cilíndricas e ortogonais.
Em função do uso constante que faremos das famílias de curvas e superfícies
relacionadas com os sistemas de coordenadas, vamos introduzir a seguinte
terminologia. Dado um sistema de coordenadas, o conjunto das famílias de curvas,
ou superfícies, induzidas pela equação, coordenada = constante, será chamado de
rede induzida pelo sistema de coordenadas. Por exemplo, no plano, a rede induzida pelas
coordenadas polares é formada pelas semirretas com origem em (0, 0) e pelos círculos
de centro em (0, 0). No sistema de coordenadas esféricas do R3 , a rede induzida
é formada pelas semirretas de origem (0, 0, 0) e as esferas de centro em (0, 0, 0).
Resumindo, temos três casos.
Caso 1: Imagine um feixe de retas paralelas em R3 . Sendo o feixe uma família de
curvas, isto é, de objetos de dimensão 1, uma família ortogonal ao feixe de retas deve
ser formada por superfícies. A única maneira de se obter uma família de superfícies
ortogonais a um feixe de retas paralelas é formando uma família de planos paralelos,
ortogonais ao feixe.
Um sistema de coordenadas em R3 cuja rede induzida tenha estas características
tem, então, que coincidir com o sistema de coordenadas ortogonais.
Caso 2: Imagine um feixe de semirretas com origem em (0, 0, 0). A única maneira de se
obter uma família de superfícies ortogonais a um feixe de semirretas é formando uma
família de esferas com centro na origem de feixe.
Um sistema de coordenadas em R3 cuja rede induzida tenha estas características
tem, então, que coincidir com o sistema de coordenadas esféricas.
Caso 3: Imagine agora um feixe de semiplanos, ou seja, um conjunto de semiplanos
com origem em uma determinada reta do espaço. Sendo o feixe uma família de
superfícies, isto é, de objetos de dimensão 2, uma família ortogonal ao feixe de
semiplanos deve ser formada por curvas. A única maneira de se obter uma família
de curvas ortogonais a um feixe de semiplanos é formando uma família de círculos
com centro na reta origem do feixe, ortogonais ao feixe.
Um sistema de coordenadas em R3 cuja rede induzida tenha estas características
tem, então, que coincidir com o sistema de coordenadas cilíndricas.
12
Capítulo 1: Decompondo o espaço R3 em dois fatores
Capítulo 2
O estudo da Geometria Hiperbólica por
meio de um modelo
Vamos estudar um modelo de Geometria Espacial diferente da Euclidiana. Neste
modelo poderemos explorar e investigar sobre conhecimentos relacionados com a
Geometria Hiperbólica. O foco é estudar algumas superfícies notáveis, por analogia
ao caso euclidiano.
2.1
Geometria Hiperbólica
A Geometria Hiperbólica é resultado de um longo processo de questionamentos e
análises da estrutura axiomática da Geometria Euclidiana, e até de experimentações
práticas. Como consequência deste processo, no século XIX, estabeleceu-se uma nova
estrutura axiomática que deu origem a outra geometria, de características próprias.
Basicamente, a Geometria Hiperbólica nasce quando se troca o quinto postulado de
Euclides pelo postulado que diz que por um ponto fora de uma reta podem ser traçados pelo
menos duas retas que não encontram a reta dada.
Considerando esta mudança axiomática, cabe lembrar que muitos enunciados de
natureza métrica, ou quantitativa, dependem do quinto postulado de Euclides para
serem considerados como resultados da Geometria Euclidiana. Por exemplo, temos o
teorema de Pitágoras para triângulos retângulos e o teorema sobre a soma dos ângulos
de um triângulo ser 180o .
A proposta aqui não é desenvolver um estudo axiomático da Geometria
Hiperbólica, muito menos se pretende fazer uso sistemático deste conhecimento.
Vamos, sim, fazer referência a elementos da Geometria Hiperbólica e, para isto,
faremos nosso estudo apoiados num modelo desta teoria.
2.2
Um modelo de Espaço Hiperbólico
O modelo de espaço hiperbólico que vamos considerar é o conhecido modelo do
semiespaço de Poincaré, H, onde:
• H = ( x, y, z) ∈ R3 : z > 0 ;
13
14
Capítulo 2: O estudo da Geometria Hiperbólica por meio de um modelo
• os pontos de H são os elementos do próprio conjunto;
• as retas de H são os semicírculos de R3 contidos em H que têm centro no plano
z = 0 e estão contidos num plano perpendicular ao plano z = 0; além das
semirretas de R3 que estão contidas em H, têm origem no plano z = 0 e são
perpendiculares a este;
• os planos de H são as semiesferas de R3 contidas em H e que têm centro no plano
z = 0, além dos semiplanos com origem no plano z = 0 e perpendiculares a este.
Em primeiro lugar, não custa lembrar que estes elementos não definem exatamente
a Geometria Hiperbólica. Estas são somente as primeiras referências para se
estabelecer o conjunto H como um modelo da teoria.
Quando for necessário ser mais específico, usaremos os termos ponto hiperbólico, reta
hiperbólica e plano hiperbólico como referência aos elementos geométricos de H.
Exemplo: Num estudo axiomático e abstrato, não importa o que são os objetos
envolvidos, qual é a natureza deles. Só o que interessa são as propriedades assumidas
para os objetos, os axiomas da teoria. Por outro lado, num estudo baseado num
modelo, os objetos de estudo são explicitamente descritos e as propriedades devem,
ou melhor, podem ser deduzidas a partir do conhecimento da natureza destes objetos.
A partir do modelo estabelecido aqui, podemos verificar resultados da teoria
da Geometria Hiperbólica levando em consideração os elementos do modelo
explicitamente definidos. Por exemplo, num estudo axiomático e abstrato desta teoria,
a propriedade, dois pontos distintos quaisquer pertencem a uma única reta, é um de seus
axiomas, é uma propriedade postulada. Agora, no nosso modelo, podemos verificar
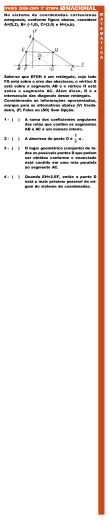
tal propriedade. De fato, dados P e Q em H, se as respectivas projeções ortogonais
destes pontos sobre z = 0 não coincidem, existe um único plano euclidiano, α, que
é perpendicular ao plano euclidiano z = 0 e que contém P e Q. Para este caso
consideramos o ponto médio, A = ( P + Q)/2, e, então, consideramos a reta euclidiana,
r, que passa por A, é perpendicular ao segmento euclidiano PQ e está contida em α. A
reta hiperbólica que contém P e Q é dada pelo semicírculo contido em α que contém
P e Q e tem centro dado pela interseção da reta r com o plano z = 0. Se a projeção
ortogonal de P sobre z = 0 é igual à projeção ortogonal de Q sobre z = 0, a reta
hiperbólica é dada pela semirreta que contém P e Q e tem origem no plano z = 0.
A verificação da unicidade é imediata de conhecimentos de Geometria Euclidiana
espacial. Veja uma representação gráfica da situação aqui descrita.
2.2: Um modelo de Espaço Hiperbólico
15
Observação: Procedendo como no exemplo anterior, podemos usar o modelo para
provar propriedades da Geometria Hiperbólica. Contudo, podemos também mesclar
o estudo, ora usando argumentos baseados nas relações explícitas entre os objetos
do modelo, ora usando argumentos lógico-dedutivos exclusivamente baseados nos
axiomas e resultados básicos da Geometria Hiperbólica. Um estudo assim, no caso
euclidiano, é conhecido como Geometria Analítica. Assim, considerando o nosso
modelo de espaço hiperbólico, podemos seguir uma teoria que bem poderia se chamar
Geometria Hiperbólica Analítica.
Continuando com a descrição do modelo de espaço hiperbólico, quero agora
falar sobre um conhecimento fundamental, as isometrias do espaço hiperbólico. As
isometrias de H são dadas pelas restrições a H de isometrias euclidianas, homotetias e
inversões (que levam H sobre H), além das composições destas.
Lembro que uma homotetia é uma aplicação de R3 , definida a partir de um ponto
~
C ∈ R3 e um fator r > 0, que transforma um ponto X num ponto X ′ da semirreta CX
′
de modo que CX = r.CX. E uma inversão é uma aplicação definida a partir de um
ponto C ∈ R3 e um fator r > 0, que leva um ponto X 6= C num ponto X ′ da semirreta
~ de modo que CX.CX ′ = r2 (A inversão funciona como a reflexão com relação a
CX
uma esfera).
Exercício: Descreva explicitamente quais são as isometrias, homotetias e inversões
de R3 que levam H sobre H. Mostre que o conjunto das composições destes tipos de
aplicações forma um subgrupo de Bij(H), conjunto de todas as bijeções de H.
Uma curiosidade, se tivéssemos iniciado este estudo de acordo com a abordagem
proposta por Felix Klein, em seu Erlanger programm, em 1872, para se estabelecer o
conjunto H como modelo de espaço hiperbólico, definiríamos em primeiro lugar um
determinado grupo de transformações de H. No caso, devemos considerar o subgrupo
de bijeções de H, Iso(H), que é gerado pelos três tipos de aplicações que acabamos
de destacar. Podemos dizer que Iso(H) é o grupo das transformações hiperbólicas e seus
elementos são chamados de transformações isométricas, ou simplesmente de isometrias.
Pela interpretação do termo, transformação, que se dá a uma função, dizemos que o
grupo Iso(H) age sobre H.
Segundo a proposta de Klein, o estudo da Geometria Hiperbólica se dá a partir
do estudo de propriedades que são invariantes pela ação de Iso(H) e, assim, a análise
de invariantes hiperbólicos também pode ser uma possibilidade de abordagem para
desenvolvimento do nosso estudo sobre Geometria Hiperbólica. Por exemplo, uma
vez estabelecido o grupo de transformações que agem sobre H, podemos verificar
16
Capítulo 2: O estudo da Geometria Hiperbólica por meio de um modelo
que as retas e os planos hiperbólicos são de fato elementos da Geometria Hiperbólica,
pois as propriedades, "ser reta hiperbólica"e "ser plano hiperbólico", são propriedades
invariantes pela ação de Iso(H).
Exercício: Verifique que as isometrias de H levam retas hiperbólicas em retas
hiperbólicas e planos hiperbólicos em planos hiperbólicos, isto é, retas e planos
hiperbólicas são invariantes pela ação de Iso(H). Aproveitando o exercício, mostre
que, dadas duas retas hiperbólicas, existe uma isometria de H que transforma uma
reta na outra (o mesmo vale para dois planos hiperbólicos).
Exercício: Verifique se são invariantes pela ação de Iso(H), sempre que estão contidos
em H: as esferas euclidianas; os círculos euclidianos (contidos num plano euclidiano);
os semiplanos euclidianos; os planos euclidianos; as semirretas euclidianas; as retas
euclidianas.
Com relação à noção de ângulo, o conceito é análogo ao caso euclidiano e a medida
de ângulo em H deve coincidir com a noção de medida de ângulo entre curvas de R3 .
Observe que só pode ser assim, pois as aplicações escolhidas como as isometrias de
H são aplicações conformes de R3 . Ou seja, a noção euclidiana de medida de ângulo
entre curvas é uma propriedade invariante pela ação do grupo Iso(H).
Exercício: Uma aplicação f : U ⊂ R3 → R3 , com U sendo um aberto de R3 , é dita
uma aplicação conforme se é diferenciável e, para todo p ∈ U, para todos u, v ∈ R3 ,
tem-se h f ′ ( p)u, f ′ ( p)vi = λ( p) hu, vi , onde λ( p) representa um número que depende
de p. Verifique que as isometrias de H são aplicações conformes. Verifique que
uma aplicação conforme preserva ângulo entre curvas, ou seja, se f é uma aplicação
conforme e α, β são curvas que se interceptam em p ∈ R3 então o ângulo entre α e β
em p é igual ao ângulo entre f ◦ α e f ◦ β em f ( p).
Exemplo: Um cilindro da Geometria Euclidiana é obtido pela união de retas paralelas
entre si e que contém algum ponto de uma curva plana (para simplificar nossa
discussão, vamos considerar a noção de cilindro completo, isto é, com as geratrizes
sendo retas). Assim, um cilindro euclidiano fica determinado quando é dada uma
curva contida num plano e uma reta secante a este plano. Contudo, transferir este
conceito para o espaço hiperbólico não é um ação imediata. De fato, quando se
estabelece uma reta hiperbólica e uma curva sobre um plano hiperbólico, dado um
ponto da curva, não é possível determinar precisamente a reta paralela que contém este
ponto, pois, ao contrário do que acontece na Geometria Euclidiana, existem infinitas
retas paralelas a uma reta dada e sobre um mesmo ponto.
Dada uma reta hiperbólica e um ponto fora desta, existem uma infinidade de retas
hiperbólicas paralelas à reta dada que contém tal ponto. Porém, podemos usar a noção
de ângulo para determinar uma reta específica. Vejamos, então, o cilindro euclidiano
sobre outro enfoque. Dado um cilindro euclidiano, consideramos uma geratriz do
cilindro e um plano euclidiano perpendicular à geratriz. A interseção deste plano com
a superfície é uma curva. Assim, podemos ver um cilindro como o conjunto das retas
perpendiculares a um plano e que passam por algum ponto da curva.
2.2: Um modelo de Espaço Hiperbólico
17
Com base nessa preliminar, parece ser razoável definir a seguinte noção. Um
cilindro hiperbólico completo é a união de retas hiperbólicas que passam por uma
curva contida num plano hiperbólico e são perpendiculares a este. A pergunta que
segue depois desta definição é: Esta é uma boa definição? Ou melhor, será que
as propriedades conhecidas para os cilindros euclidianos são preservadas para esta
versão hiperbólica? Ou, será que esta definição gera propriedades tão boas quanto a
versão euclidiana gera? Vou deixar estas perguntas no ar por enquanto e o leitor está
convidado a pensar sobre o assunto.
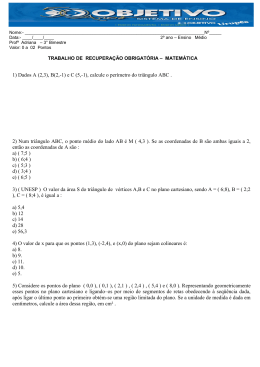
Observação: No exemplo anterior, eu chamei a atenção para o fato de que, dada uma
reta r e um ponto fora desta, existe uma infinidade de retas paralelas a r que passam
por P. Na verdade, esta situação não é aleatória. Veja uma interpretação da situação na
seguinte representação do nosso modelo de espaço hiperbólico. É claro que a discussão
sobre retas paralelas só faz sentido quando restritas a um plano. A figura representa
uma reta r dada e um ponto P fora desta. Aí, percebemos uma infinidade de retas
hiperbólicas que passam por P e são paralelas a r, isto é, percebemos um feixe de
retas paralelas a r e passando por P. Note, pelo desenho, que devem existir duas retas
especiais, são retas que vou chamar, por hora, de retas limites do feixe. Estas retas
gozam de propriedades especiais. Por exemplo, é possível mostrar que se s é uma das
duas retas limites do feixe então dH (r, s) = inf {dH ( p, q) : p ∈ r e q ∈ s} = 0, onde dH
denota a distância hiperbólica (noção que ainda vamos apresentar). Assim, duas retas
hiperbólicas paralelas com um ponto em comum no plano z = 0 são chamadas de retas
assintóticas. Duas retas hiperbólicas paralelas que não sejam assintóticas são chamadas
de retas ultraparalelas.
18
Capítulo 2: O estudo da Geometria Hiperbólica por meio de um modelo
Observação: Antes de continuarmos, é preciso chamar atenção para uma questão que
o leitor certamente já conhece, mas que acredito que deva ser enfatizada para melhor
apreciação do estudo que estamos desenvolvendo. A pura e simples definição de
um conjunto não determina exatamente o que é este conjunto. Para isto, é preciso
também estabelecer uma estrutura para o conjunto. Talvez seja mais fácil falar sobre
isto a partir de um exemplo. O R2 é um conjunto formado por pares de números
reais. Bom, definindo alguns elementos para este conjunto, ele pode ser visto como
um plano da Geometria Euclidiana. Por outro lado, definindo operações adequadas, o
mesmo conjunto pode ser visto como um conjunto numérico, o conjunto dos números
complexos. Ou, então, podemos ver o conjunto R2 como espaço de vetores. A forma de
entender o conjunto R2 só vai mudando, dependendo da estrutura que consideramos.
Por exemplo, o R2 pode ser visto como um espaço vetorial de dimensão 2, quando
é um espaço vetorial real. Mas, também pode ser visto como um espaço vetorial
de dimensão 1, quando é um espaço vetorial complexo. Neste texto, nós vamos
considerar várias estruturas diferentes para um mesmo conjunto, o R3 . Aí, devemos
ver este conjunto de várias maneiras. Nós já lidamos com esta
forma
diferença 3de uma 3
bastante evidente, quando consideramos o conjunto R+ = ( x, y, z) ∈ R : z > 0 com
elementos que o munem com a estrutura de espaço hiperbólico (ainda falta falar sobre
alguns elementos). Tanto é assim que para destacar esta diferença, usamos a letra H
para indicar o conjunto R3+ com esta nova estrutura geométrica. Fique atento para
estas mudanças de estrutura, leitor. Às vezes elas são sutis, mas são importantes.
Com o modelo do semiespaço de Poincaré, a introdução de um sistema de
3
coordenadas em H é bem simples, basta
considerar 3a aplicação,
i : R+ → H, i ( x ) = x,
3
3
para todo x ∈ R+ , onde R+ = ( x, y, z) ∈ R : z > 0 . Analisando a questão
sobre conjuntos e estruturas, podemos ver a aplicação i, do ponto de vista de
conjunto, apenas como a aplicação identidade. Mas, considerando possíveis estruturas
associadas ao mesmo conjunto, podemos ter uma aplicação com características
bastante variadas. Prestar a atenção para estas questões é um ótimo exercício de
Matemática, leitor.
Exemplo: O conjunto {( x, y, z) ∈ H : x = a, y = b} descreve uma reta hiperbólica. A
equação ( x − a)2 + (y − b)2 + z2 = r2 , determina um plano de H.
2.2: Um modelo de Espaço Hiperbólico
19
Exemplo: As aplicações T : H → H, T ( p) = p + ( a, b, 0), e L : H → H, L( p) =
p − p0
2 + p0 , onde p0 = ( a, b, 0), descrevem isometrias de H.
k p − p0 k
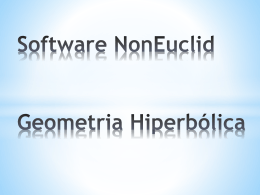
Exemplo: Consideremos as três retas sobre o plano y = 0, r, s e t, dadas,
respectivamente, pelas equações ( x − 1)2 + y2 = 2, (3 + x )2 + y2 = 18 e x = 0.
Consideremos agora o triângulo formado a partir destas retas. Usando as equações,
é fácil falar sobre os ângulos deste triângulo. Com contas elementares, podemos obter,
usando aproximações, 71o para o ângulo entre as retas r e s, e 45o para os outros
dois ângulos. Note que a soma dos ângulos é menor do que 180o . Usando uma
representação geométrica de R3 e das retas hiperbólicas, podemos analisar a situação
a partir da seguinte figura.
Exercício: Consideremos os pontos (0, 0, 2) e (0, 0, 1) e o grupo G formado por todas
as isometrias de H que deixam invariante o plano hiperbólico dado pela equação
x = 0 e que deixam o ponto (0, 0, 2) fixo. Ou seja, se g ∈ G então g(0, y, z) =
(0, g2 (y, z), g3 (y, z)) e g(0, 0, 2) = (0, 0, 2). Determine uma equação que descreva o
conjunto X = { g(0, 0, 1) ∈ H : g ∈ G }. Reescreva o conjunto X usando a noção de
distância. O conjunto X descreve que objeto da Geometria Hiperbólica? (Note que
ainda não falei sobre a noção de distância hiperbólica, mas é natural esperar, ou pedir,
que esta seja invariante pela ação de Iso(H).)
Exercício: Novamente, consideremos os pontos (0, 0, 2) e (0, 0, 1). Mas, agora G denota
o grupo de todas as isometrias de H que deixam o ponto (0, 0, 2) fixo. Determine uma
equação que descreva o conjunto X = { g(0, 0, 1) ∈ H : g ∈ G }. Reescreva o conjunto
X usando a noção de distância. O conjunto X descreve que objeto da Geometria
Hiperbólica?
Projeto: Segundo a apresentação deste texto, ainda não sabemos falar sobre a noção
de distância hiperbólica. Contudo, podemos comparar tamanhos com apoio das
isometrias. O programa de Geometria Dinâmica, GeoGebra, pode ser uma ótima
ferramenta para o estudo de transformações dadas pelas isometrias hiperbólicas.
Sugiro tentar perceber o modelo do semiespaço de Poincaré como Espeço Hiperbólico
com a ajuda deste programa. Por exemplo, tente obter um segmento isométrico
a outro dado, em uma mesma reta e em retas distintas. Procure notar como
20
Capítulo 2: O estudo da Geometria Hiperbólica por meio de um modelo
a percepção euclidiana é bem diferente da percepção oferecida pelo modelo da
geometria hiperbólica. Sugiro também entender a transitividade das transformações
hiperbólicas, isto é, a propriedade de que dados p, q ∈ H, existe g ∈ Iso(H) tal
que q = g( p). Inclusive, alguns exercícios podem ser resolvidos com recursos do
GeoGebra.
2.3
Outros sistemas de coordenadas em H
O sistema de coordenadas, i : R3+ → H, i ( x ) = x, não é tão especial quanto no
caso euclidiano. Em H, este sistema de coordenadas não é cartesiano, apesar de ser
ortogonal. Ou seja, as curvas coordenadas, x = constante e y = constante, formam
uma rede de curvas ortogonais entre si, mas estas curvas não são retas hiperbólicas,
pelo menos as curvas da família y = constante não são. Vale lembrar que a Geometria
Hiperbólica não permite nenhum sistema de coordenadas cartesianas, isto é um dos
resultados da teoria.
No entanto, em R3 , encontramos outros sistemas de coordenadas ortogonais
importantes, como as coordenadas cilíndricas e as coordenadas esféricas. Será possível
encontrar algo análogo no espaço hiperbólico? Se sim, estes sistemas de coordenadas
descreveriam mais facilmente superfícies e sólidos de interesse?
Em primeiro lugar, vejamos como seria um sistema de coordenadas polares no
plano hiperbólico. Vamos analisar esta questão a partir da noção de feixes de retas
hiperbólicas, e de semirretas hiperbólicas.
Um sistema de coordenadas polares no plano euclidiano é caracterizado por ter
duas famílias ortogonais de curvas coordenadas, uma dada por um feixe de semirretas
com origem num mesmo ponto e outra formada necessariamente por círculos com
centro na origem do feixe. A reprodução desta ideia para o plano hiperbólico é
ilustrada nas próximas figuras.
2.3: Outros sistemas de coordenadas em H
21
Caso 1: (feixe de semirretas hiperbólicas)
Considerando um feixe de semirretas hiperbólicas, a família de curvas ortogonais
necessariamente é formada por círculos, mas o centro dos círculos não coincide com
a origem do feixe de semirretas. O leitor pode provar este fato, mas também pode
percebê-lo com recursos da Geometria Dinâmica.
A situação aqui é realmente análoga ao caso euclidiano, pois as curvas ortogonais
ao feixe de semirretas são também círculos hiperbólicos.
Projeto: Com os recursos do GeoGebra, realize transformações sobre um segmento
PQ com o grupo das isometrias que deixam P fixo. Verifique que o conjunto das
imagens de Q pela ação deste grupo é um círculo euclidiano contido em H. Os círculos
euclidianos são círculos hiperbólicos.
O interessante da versão hiperbólica das coordenadas polares é que podemos obter
mais dois casos.
22
Capítulo 2: O estudo da Geometria Hiperbólica por meio de um modelo
Caso 2: (feixe de retas hiperbólicas paralelas assintóticas)
Uma curiosidade na relação entre as coordenadas polares e as cartesianas no plano
euclidiano é que a última pode ser vista como uma situação limite da primeira, quando
fazemos a origem do feixe de semirretas ir para infinito. As duas figuras a seguir
representam dois sistemas de coordenadas quando levamos para o infinito a origem
de um feixe de semirretas hiperbólicas.
Apesar do aspecto diferente entre as duas figuras, os dois sistemas de coordenadas
são equivalentes, pois um pode ser visto com resultado da transformação por uma
isometria do tipo reflexão com relação a um círculo.
Os sistemas de coordenadas ilustrados no caso 2 podem ser descritos como um
sistema de coordenadas com uma família de curvas coordenadas formada por um
feixe de retas hiperbólicas assintóticas. Note que as curvas ortogonais ao feixe de retas
hiperbólicas assintóticas são invariantes pela ação de Iso(H).
2.3: Outros sistemas de coordenadas em H
23
Caso 3: (feixe de retas hiperbólicas ultraparalelas)
Seguindo a generalização, e utilizando feixes de retas hiperbólicas paralelas agora
do tipo ultraparalelas, obtemos mais uma generalização do sistema de coordenadas
polares. A figura a seguir ilustra este caso.
Novamente, as curvas ortogonais ao feixe de retas hiperbólicas ultraparalelas são
invariantes pela ação de Iso(H).
A partir das versões hiperbólicas das coordenadas polares, podemos especular
sobre versões hiperbólicas para coordenadas esféricas e cilíndricas.
Se estas
generalizações fizerem sentido, temos, então, seis possibilidades, três possibilidades
de coordenadas esféricas e três de coordenadas cilíndricas.
A introdução de sistemas de coordenadas no espaço hiperbólico a partir dos três
casos apresentados leva a formalização de seis sistemas de coordenadas ortogonais
bastante interessantes, três casos do tipo coordenadas esféricas hiperbólicas e três casos do
tipo coordenadas cilíndricas hiperbólicas. Vejamos como seriam estas generalizações.
As coordenadas esféricas do espaço euclidiano são obtidas considerando um feixe
de semirretas. Neste caso, a família ortogonal é formada por esferas com centro na
origem do feixe. A reprodução desta ideia para o caso 1 das coordenadas polares
hiperbólicas gera um sistema de coordenadas a partir da decomposição de H por uma
família formada por um feixe de semirretas hiperbólicas e por uma família de esferas
euclidianas ortogonais ao feixe. Podemos reproduzir esta ideia a partir dos outros dois
casos de coordenadas polares hiperbólicas.
As coordenadas cilíndricas do espaço euclidiano são obtidas a partir de um feixe
de semiplanos. Neste caso, a família ortogonal é um conjunto de círculos ortogonais
aos semiplanos e com centro no eixo origem do feixe. A reprodução desta ideia para
o caso 1 das coordenadas polares hiperbólicas coincide com a imagem euclidiana de
um sistema de coordenadas cilíndricas. Novamente podemos reproduzir a ideia de
coordenadas cilíndricas para o espaço hiperbólico a partir dos outros dois casos de
coordenadas polares hiperbólicas.
24
Capítulo 2: O estudo da Geometria Hiperbólica por meio de um modelo
Vamos formalizar a ideia de sistema de coordenadas. Toda aplicação bijetiva,
ϕ : U ⊂ R3 → H, onde U denota um conjunto aberto de R3 , será chamada de um
sistema (local) de coordenadas em H. Assim, podemos indicar um sistema de coordenadas
esféricas hiperbólicas, por exemplo, por
ϕ : R × ( N − { p}) ⊂ R3 → H,
onde N denota uma esfera euclidiana contida em H e tangente ao plano z = 0, e
p é o ponto de tangência. Devemos observar que a notação não explicita como a
aplicação parametriza o espaço H, mas não deixa dúvidas sobre qual dos três tipos
de coordenadas esféricas estamos nos referindo. Neste exemplo, a referência só pode
ser com relação às coordenadas esféricas que generalizam o 2o caso de coordenadas
polares.
Exercício: Faça desenhos que representem os três casos de coordenadas esféricas e os
três casos de coordenadas cilíndricas.
Exercício: Represente todos os tipos de coordenadas esféricas, e cilíndricas, por meio
de aplicações do tipo ϕ : U ⊂ R3 → H.
Capítulo 3
Algumas superfícies notáveis do Espaço
Hiperbólico
De posse de sistemas de coordenadas análogos aos sistemas de coordenadas
esféricas e cilíndricas, vamos criar, por analogia ao caso euclidiano, algumas
superfícies notáveis.
3.1
Algumas superfícies do R3 generalizadas para H
A introdução de novos sistemas de coordenadas em regiões do espaço euclidiano
costuma ter por finalidade simplificar a descrição de certos conjuntos ou funções.
Vamos aplicar esta ideia no espaço hiperbólico a fim de criar alguns subconjuntos
especiais, a saber, superfícies do tipo de rotação e cone.
O sistema de coordenadas cilíndricas euclidianas é útil para a descrição das
superfícies conhecidas como superfície de rotação. Vamos generalizar este conceito
para o espaço hiperbólico por analogia. Assim, um subconjunto S ⊂ H será chamado
de superfície de rotação hiperbólica se puder ser parametrizado por uma aplicação do tipo
(s, t) ∈ I × N 7→ ϕ(α(s), t),
onde ϕ : V × N ⊂ R3 → H representa um sistema de coordenadas cilíndricas
hiperbólicas e α : I ⊂ R → V representa uma curva sobre o semiplano, ou plano
(dependendo do caso), V. Numa superfície de rotação parametrizada, os paralelos
são dados pela imagem das curvas t ∈ N 7→ (s0 , t) ∈ I × N 7→ ϕ(α(s0 ), t) ∈ H e os
meridianos são dados pela imagem das curvas s ∈ I 7→ (s, t0 ) ∈ I × N 7→ ϕ(α(s), t0 ) ∈
H.
O primeiro caso de coordenadas cilíndricas hiperbólicas leva a uma imagem da
superfície de rotação hiperbólica semelhante à euclidiana.
Agora, considerando os outros casos de coordenadas cilíndricas hiperbólicas, a
simples generalização do conceito euclidiano de superfície de rotação não parece fazer
muito sentido para nossa percepção euclidiana. Veja um caso representado na próxima
figura.
25
26
Capítulo 3: Algumas superfícies notáveis do Espaço Hiperbólico
No
caso
ilustrado,
a
superfície
de
rotação
hiperbólica possuiria uma parametrização do tipo (s, t) ∈ I × N 7→ ϕ(α(s), t), onde
ϕ : V × N ⊂ R3 → H representa um sistema de coordenadas cilíndricas hiperbólicas
a partir de um feixe de planos hiperbólicos ultraparalelos. O primeiro fator, N, é um
desses planos hiperbólicos. A imagem da curva α contida em N se estende ao longo
de curvas ortogonais ao feixe de planos hiperbólicos. Curiosamente, a figura obtida
coincide com a percepção euclidiana de um cone. Será que podemos mesmo chamar
este tipo de superfície de superfície de rotação?
Uma propriedade que caracteriza as superfícies de rotação no espaço euclidiano é
a invariância destas pelo subgrupo das isometrias do espaço que deixa uma reta fixa.
Será que as superfícies de rotação hiperbólicas gozam desta propriedade?
Exercício: Seja S uma superfície de rotação hiperbólica obtida do primeiro caso de
coordenadas cilíndricas. Seja G o grupo das isometrias que deixa o eixo do feixe de
semiplanos fixo. Entenda, com um bom desenho, que S é invariante por G, isto é,
para todo g ∈ G, g(S) ⊂ S. Verifique que, quando o eixo do feixe é uma semirreta
euclidiana, G é dado justamente pelas rotações do espaço euclidiano que deixam tal
eixo fixo.
Exercício: Entenda que, para os dois outros casos de superfície de rotação hiperbólica,
também existe um subgrupo de isometrias de Iso(H) que deixa a superfície invariante.
Nestes casos, existe um subconjunto deixado fixo?
O conceito de superfície de rotação foi muito importante para a navegação ao
redor de nosso planeta. Numa época em que se imaginava que a forma da Terra era
esférica, em 1569, o cosmógrafo e cartógrafo, Gerhard Kremer, desenvolveu a Projeção
de Mercator, que permitia representar o globo terrestre numa região plana de uma
maneira muito especial, onde os meridianos e os paralelos da Terra são representados
por segmentos de reta e os segmentos de reta, de modo geral, representavam as curvas
de rumo (ou loxodrômicas), curvas que permitiam um navegante traçar rotas a partir
da medição de direções (com bússolas ou pelas estrelas, por exemplo). Contudo,
posteriormente, a partir de trabalhos de Newton, descobriu-se que a terra não tinha
3.1: Algumas superfícies do R3 generalizadas para H
27
uma forma esférica, mas algo do tipo elipsoidal. O interessante é que a projeção de
Mercator continuou sendo útil para o novo modelo matemático da Terra. O fato é que
o conceito de projeção de Mercator serve para qualquer superfície de rotação, isto é,
qualquer superfície de rotação possui um mapa plano de navegação (ver [1], página
276, exercício 20). Além das superfícies cilíndricas, as superfícies de rotação são as
superfícies navegáveis, no sentido da Projeção de Mercator.
As superfícies de rotação hiperbólicas passaram a ter algumas características
diferentes das que percebemos no caso euclidiano. Por exemplo, os paralelos nem
sempre são curvas fechadas (isso acontece no segundo caso). Contudo, os três casos
de superfície de rotação hiperbólica possuem a propriedade de serem navegáveis, isto
é, possuem uma rede formada por meridianos e paralelos e admitem o conceito de
loxodrômicas.
Projeto: O leitor interessado certamente encontrará bons problemas dentro do tema,
navegação em superfícies hiperbólicas. Explicitar a Projeção de Mercator e as curvas
loxodrômicas para as superfícies de rotação hiperbólicas parece ser um bom problema
de investigação.
Ainda falaremos sobre outras propriedades das superfícies de rotação hiperbólicas.
No espaço euclidiano, as coordenadas esféricas serviram para a definição do
conceito de cone. Um cone é obtido a partir de uma curva da esfera e de um ponto, ou
melhor, é a união de um feixe de semirretas a partir de um ponto e passando por uma
curva dada na esfera. Esta ideia é facilmente reproduzida no espaço hiperbólico. Para
isso, considere um sistema de coordenadas esféricas hiperbólicas,
ϕ : I × N ⊂ R3 → H .
Um cone hiperbólico é a superfície obtida por uma parametrização do tipo
(s, t) ∈ I × J 7→ ϕ(s, α(t)),
onde α : J ⊂ R → N representa uma curva sobre a superfície N.
No espaço euclidiano, quando a curva está contida numa esfera com centro
na origem do feixe de semirretas, o vértice do cone, não precisamos conhecer
explicitamente tal vértice. Neste caso, o cone fica determinado pelo feixe das semirretas
que passam pela curva e são ortogonais à esfera que contém a curva. Esta ideia
28
Capítulo 3: Algumas superfícies notáveis do Espaço Hiperbólico
também se propaga no caso hiperbólico. O interessante é que esta observação nos
leva a exemplos sem correspondência com o caso euclidiano.
Quando consideramos um sistema de coordenadas esféricas hiperbólicas do tipo,
ϕ : R × ( N − { p}) ⊂ R3 → H, onde N denota uma esfera euclidiana contida em H e
tangente ao plano z = 0, e p é o ponto de tangência, temos um cone sem comparação
no espaço euclidiano, um cone sem vértices. É o que chamamos de um cone completo. O
terceiro caso de coordenadas esféricas também gera cones completos. Mas, existe uma
particularidade neste caso.
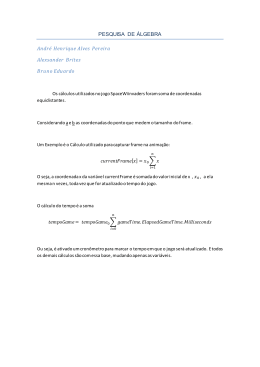
A figura a seguir representa um cone obtido a partir do terceiro caso de
coordenadas esféricas. O leitor já viu esta figura. Ela também representou a construção
de um cilindro hiperbólico. Agora a generalização dos dois conceitos ficou confusa. No
caso euclidiano, as superfícies cilíndricas e os cones têm características bem distintas,
tirando o fato de serem todas superfícies regradas.
Podemos chamar uma superfície como a representada na figura acima de cone
hiperbólico? De cilindro hiperbólico? Num cilindro euclidiano, as seções paralelas a tal
superfície são figuras isométricas entre si. Tal fato se propaga no Espaço Hiperbólico?
Como falar em seções paralelas no espaço hiperbólico é mais complicado, será que
podemos falar em seções perpendiculares as retas hiperbólicas que formam o cilindro?
Existem outras propriedades sobre superfícies cilíndricas do espaço euclidiano que
poderiam ser preservadas no caso hiperbólico?
Se olharmos uma superfície como a representada na última figura como um cone
hiperbólico, podemos verificar que as curvas obtidas de secções pela família de
superfícies ortogonais ao feixe de retas hiperbólicas possuem a mesma forma, mas
tamanhos diferentes, assim como acontece no caso euclidiano?
Projeto: Crie uma representação bidimensional de um cilindro hiperbólico/cone
hiperbólico, como na figura abaixo, no programa GeoGebra. Use as isometrias
hiperbólicas para tentar responder as últimas perguntas.
3.1: Algumas superfícies do R3 generalizadas para H
29
Leitor, precisamos tomar muito cuidado com generalizações, ou analogias,
principalmente na hora de dar nomes ou de classificar. No último capítulo vamos
terminar esta discussão sobre a classificação das superfícies consideradas aqui.
Projeto: Estudar a possibilidade de estender o conceito de helicóide, que encontramos
no Espaço Euclidiano, para o espaço H.
Projeto: Falar de cones, ou mesmo de cilindros, no espaço euclidiano, significa falar
de superfícies que não são necessariamente planas, mas que podem se deformadas
isometricamente num plano. Por exemplo, um cone de papel, quand cortado, pode
ser esticado sobre uma mesa e assume uma forma plana. Não podemos fazer isso com
qualquer superfície, não podemos planificar uma esfera. E no Espaço Hiperbólico, será
que os cones hiperbólicos podem ser deformados isometricamente sobre um plano
hiperbólico? Este parece ser um bom problema de investigação.
30
Capítulo 3: Algumas superfícies notáveis do Espaço Hiperbólico
Capítulo 4
O Espaço Esférico
De posse de sistemas de coordenadas análogos aos sistemas de coordenadas
esféricas e cilíndricas, vamos criar, por analogia ao caso euclidiano, algumas
superfícies notáveis.
4.1
Um modelo de Espaço Esférico
A Geometria Hiperbólica nasceu de uma mudança do sistema axiomático que
definiu a Geometria Euclidiana. Considerando novas mudanças podemos obter outras
geometrias. Considerando um novo sistema axiomático que contenha a troca do o
quinto postulado de Euclides pela afirmação de que por um ponto fora de uma reta
não podem ser traçados retas que não encontram a reta dada, podemos definir a conhecida
Geometria Esférica. Esta é a versão tridimensional da bastante conhecida
geometria da esfera. Este capítulo é um exercício de generalização do que foi
estudado neste texto. Vamos novamente adotar um modelo para o estudo. Uma
grande diferença na nova abordagem é considerar um modelo definido no espaço
quadridimensional, R4 . Agora não teremos mais o apoio de uma boa visualização dos
objetos de estudo, pois estamos falando de objetos de um espaço de dimensão quatro.
O modelo de Espaço Esférico que vamos considerar é o dado pelo conjunto, S3 , onde:
• S3 = p ∈ R4 : k p k = 1 ;
• os pontos de S3 são os elementos de próprio conjunto;
• as retas de S3 são as interseções de subespaços vetoriais bidimensionais de R4
com S3 , os chamados círculos máximos;
• os planos de S3 são as interseções de subespaços vetoriais tridimensionais de R4
com S3 .
Novamente, estes objetos ainda não definem completamente um modelo de Geometria
Esférica, são apenas as primeiras referências para se estabelecer o conjunto S3 como um
modelo de Espaço Esférico.
Outros elementos que definimos facilmente são ângulo e as isometrias do espaço.
A noção de ângulo entre retas esféricas é a dada pela noção de ângulo entre curvas do
31
32
Capítulo 4: O Espaço Esférico
R4 . As isometrias de S3 são justamente as isometrias de R4 que deixam S3 invariante,
isto é, são os operadores ortogonais de R4 .
Exercício: Leitor, note que não dissemos que o conceito de ângulo é análogo ao
caso euclidiano, assim como fizemos para o espaço hiperbólico. O que acha, você
conseguiria reproduzir o conceito de ângulo euclidiano para o espaço esférico? Pense
no problema num plano esférico, isto é, na esfera S2 de R3 . Uma dica, você já ouviu
falar em lúnulas, ou biângulos? A propósito, você sabe o que significa ângulo entre
curvas? Cuidado para não confundir a noção com a de mediada de ângulo!
O espaço esférico também não goza de um sistema de coordenadas cartesianas.
Assim, a busca por outras formas de decomposições pode se basear na técnica utilizada
no caso hiperbólico.
Exercício: Mostre que não existem retângulos em S3 .
O leitor interessado pode encontrar informações interessantes sobre a Geometra
Esférica em [5].
4.2
As coordenadas esféricas e cilíndricas em S3
As coordenadas esféricas e cilíndricas de S3 serão definidas como generalização das
respectivas noções nos espaços euclidiano e hiperbólico a partir da ideia de feixe. Antes
de apresentarmos estes sistemas de coordenadas, vamos analisar como seria o sistema
de coordenadas polares no plano esférico S2 ⊂ R3 . Neste caso, as retas esféricas são
os círculos máximos e, em particular, não temos a noção de feixe de retas paralelas
(não existem retas paralelas num plano esférico). Também não parece ter sentido falar
em semirretas. Assim, consideramos só a noção de feixe de retas concorrentes. Dado
um ponto p ∈ S2 , um feixe de retas esféricas concorrentes em p é um conjunto de círculos
máximos que passam por p. Uma família de curvas ortogonais a um feixe de retas
concorrentes em p é dada por círculos da esfera obtidos como interseção de S2 com
planos euclidianos de R3 ortogonais ao vetor p.
Um sistema de coordenadas em S2 com uma rede induzida sendo formada por um
feixe de retas esféricas concorrentes em e3 = (0, 0, 1) e por uma família de círculos
ortogonais ao feixe pode ser descrita por
(t, x ) ∈ (0, π ) × S1 7→ sin(t) x + cos(t)e3 ∈ S2 − {±e3 } ,
onde S1 = ( x, y, 0) ∈ R3 : x2 + y2 = 1 . Neste sistema, quando t varia, segmentos de
retas do feixe são descritos e, quando s varia, círculos ortogonais ao feixe são descritos.
As coordenadas esféricas no espaço esférico S3 (com origem no ponto e4 =
(0, 0, 0, 1), por simplicidade) são generalizadas da seguinte maneira. A aplicação
(t, x ) ∈ (0, π ) × S2 7→ sin(t) x + cos(t)e4 ∈ S3 − {±e4 } ,
onde S2 = ( x, y, z, 0) ∈ R4 : x2 + y2 + z2 = 1 , define um sistema de coordenadas em
S3 − {±e4}. As curvas t 7→ sin(t) x + cos(t)e4 estão no plano gerado pelos vetores x
4.2: As coordenadas esféricas e cilíndricas em S3
33
e e4 . Daí, estão na interseção de S3 com um plano, ou seja, estão sob retas esféricas
que passam por e4 . Portanto, as curvas x = constante parametrizam o feixe das retas
esféricas concorrentes em e4 . É imediato verificar que as curvas t = constante são
esferas ortogonais ao feixe.
Assim, pelas características observadas, vemos que o sistema de coordenadas
definido acima generaliza a noção de coordenadas esféricas para o espaço S3 . Note
que as coordenadas esféricas combrem S3 menos dois pontos antípodas.
Exemplo: Seja α : I ⊂ R → S2 uma curva. Fazendo analogia com o caso euclidiano
temos que a aplicação
(s, t) ∈ (0, π ) × I 7→ sin(s)α(t) + cos(s)e4 ∈ S3 − {±e4 }
descreve uma superfície de S3 que, por suas características, pode ser chamada de um
cone do espaço esférico, ou cone esférico. Podemos representar esta parametrização de
modo mais breve por
(s, t) ∈ (0, π ) × I 7→ ϕ(s, α(t)),
onde ϕ é a aplicação que representa um sistema de coordenas esféricas em S3 , isto é,
é uma aplicação do tipo ϕ : J × N → S3 , com J sendo um círculo máximo menos
dois pontos antípodas e N sendo uma esfera bidimensional contida em S3 . Nesta
notação, as curvas coordenadas t ∈ J 7→ ϕ(t, x0 ) parametrizam retas esféricas e as
curvas coordenadas x ∈ N 7→ ϕ(t0 , x ) parametrizam esferas esféricas.
Uma propriedade análoga ao caso euclidiano que percebemos imediatamente é que
as curvas parametrizadas por t ∈ ϕ(s0 , α(t)) possuem a mesma forma, mas tamanhos
diferentes. Uma curiosidade é que os cones esféricos têm dois vértices.
Deixamos como exercício para o leitor desenvolver um sistema de coordenadas
cilíndricas para o Espaço Esférico S3 . O primeiro passo é desecrever um feixe de
semiplanos com origem num círculo máximo.
34
Capítulo 4: O Espaço Esférico
Capítulo 5
Continuando o estudo
Este capítulo encerra o texto mostrando como o estudo de espaços não-euclidianos
poderia continuar, a saber, por meio de recursos do Cálculo Diferencial e Integral.
5.1
A noção de distância nos espaços não-euclidianos
Podemos fazer várias perguntas sobre os objetos apresentados aqui e,
consequentemente, estender o estudo. Na verdade, já deixamos perguntas. Contudo,
é importante desenvolver ferramentas adequadas para a abordagem de novos
problemas. Uma técnica que funcionou muito bem para a Geometria Euclidiana foi o
Cálculo Diferencial e Integral. Será que podemos fazer uso dos conceitos desta área nos
espaços hiperbólicos e esféricos? Certamente podemos aplicar estes conhecimentos
no espaço esférico. Por exemplo, podemos falar em distância entre dois pontos
explicitamente e facilmente. Se α : [0, 1] → S3 parametriza o menor segmento de
R1
reta que liga dois pontos p e q, então a distância entre eles é dada por 0 kα′ (t)k dt?
A extensão do Cálculo Diferencial e Integral para o espaço hiperbólico não é tão
simples. Para esse caso, é preciso rever o conceito de espaço vetorial munido de um
produto interno e generalizar para a ideia de métrica Riemanniana. Na prática, o que
precisamos fazer é definir uma noção de produto interno para o espaço tangente a H
em cada um de seus pontos. Lembramos que o espaço tangente a H em p ∈ H é dado
por
Tp H = {( p, v) ∈ H × R3 : v = α′ (0), com α : (−ǫ, ǫ) → H
curva diferenciável tal que α(0) = p}
Normalmente, identificamos Tp H com R3 e escrevemos simplesmente v ∈ Tp H, em
vez de ( p, v) ∈ Tp H.
Para cada ponto p = ( x, y, z) ∈ H, definimos o produto interno em Tp H, h, i p , por
hu, vi p = hu, vi , para todo u, v ∈ Tp H,
onde h, i representa o produto interno canônico de R3 . Assim, o produto interno h, i p
varia de acordo com o ponto p. A aplicação g : H × R3 × R3 → R, g( p, u, v) = hu, vi p
é chamada de métrica riemanniana hiperbólica de H. Com esta métrica podemos falar
35
36
Capítulo 5: Continuando o estudo
em comprimento na Geometria Hiperbólica. Dada uma curva α : [ a, b] → H, o
comprimento de α em H é definido por
l (α) =
Z b
a
α′ (t)
α(t)
dt.
Exemplo: Seja α : [ a, 1] → H dada por α(t) = (0, 0, t), onde 0 < a < 1. Então,
l (α) =
Z 1
a
k(0, 0, 1)kα(t) dt =
Z 1
1
a
t
dt = − ln( a).
Note que o comprimento de α aumenta indefinidamente, à medida que a se aproxima
de 0. Vista como um curva do espaço euclidiano, o comprimento de α é dado por
l (α) = 1 − a, valor que não ultrapassa 1.
Exercício: Mostre que para toda isometria ϕ de H e para todo p ∈ H, vale que:
′
ϕ ( p)u, ϕ′ ( p)v ϕ( p) = hu, vi p .
Exercício: Mostre que se α é uma curva então α e ϕ ◦ α têm o mesmo comprimento,
qualquer que seja a isometria ϕ de H. Ou seja, o conceito de comprimento de curva é
um invariante da Geometria Hiperbólica.
Exercício: Descreva como reparametrizar uma curva de H pelo comprimento de arco.
Parametrize uma reta de H pelo comprimento de arco.
Projeto: Como chegar à expressão da métrica riemanniana hiperbólica? Existem alguns
caminhos para justificar a fórmula apresentada e discutir estes caminhos para uma
abordagem elementar pode ser assunto para um bom estudo. Sugestão: um dos
caminhos é trabalhar com as isometrias hiperbólicas. Para a métrica ser um objeto
da Geometria Hiperbólica, é preciso que seja um invariante pela ação de Iso(H).
De posse do conceito de métrica riemanniana hiperbólica, podemos definir por
analogia ao caso euclidiano, além da noção de comprimento, noções como de área
e volume, e até outras como a de gradiente ou laplaciano de uma função, por exemplo.
Direcionando para o nosso tema central, podemos agora perguntar se relações
métricas do Espaço Euclidiano conhecidas para as superfícies estudadas aqui se
generalizam para os Espaços Hiperbólicos e Esféricos.
5.2
O Cálculo Diferencial para o estudo das formas em H
É interessante poder falar em aceleração, curvatura de uma superfície e, de
modo mais geral, de derivada de um campo com relação a outro campo. Ou
seja, é interessante poder falar numa noção de derivada compatível com a estrutura
geométrica de H.
5.2: O Cálculo Diferencial para o estudo das formas em H
37
Vamos apresentar para o leitor a noção de derivada para campo de vetores que é
útil para o estudo geométrico do espaço hiperbólico. De modo geral, precisamos ser
capazes de avaliar a variação de um determinado campo de vetores, Y, com respeito
a outro campo de vetores, X. No espaço euclidiano, esta noção é obtida pelo cálculo
da derivada, dY ( p) X ( p), quando Y é visto como uma aplicação de R3 em R3 . No
nosso contexto, a notação utilizada para este conceito de derivação entre campos é
dada por ∇ X Y para indicar a derivada covariante de Y com respeito a X. Lembramos
que um campo diferenciável de vetores tangentes é uma aplicação X : H → T H com as
coordenadas sendo funções diferenciáveis. O conjunto dos campos diferenciáveis de
vetores tangentes é denotado por X (H).
Para definir a derivada covariante em H, é desejável que as seguintes propriedades
sejam satisfeitas.
Propriedades: Dados X, Y, X ∈ X (H) e dada uma função diferenciável f ,
• ∇ X + YZ = ∇ X Z + ∇Y Z
• ∇ f XY = f ∇ X Y
• ∇ X (Y + Z ) = ∇ X Y + ∇ X Z
• ∇ X ( f Y ) = X ( f )Y + f ∇ X Y
• X (hY, Z i) = h∇ X Y, zi + hY, ∇ X Z i
• ∇
∂
∂xi
∂
∂x j
=∇
∂
∂x j
∂
∂xi
A notação X ( f ) representa a derivada de f num ponto dado na direção de X
também no ponto dado.
A partir destas propriedades, determinamos a expressão de ∇ X Y:
1
1
∇ X Y ( p ) = ( X ( y1 ) − ( x1 y3 + x3 y1 ) , X ( y2 ) − ( x2 y3 + x3 y2 ),
z
z
1
X (y3 ) + ( x1 y1 + x2 y2 − x3 y3 ))
z
Exercício: Dada uma curva α : I → H a derivada covariante ∇α′ (t) α′ (t) deve
representar a aceleração da curva no Espaço Hiperbólico. Verifique a aceleração
de α(t) = (0, 0, t) é ∇α′ (t) α′ (t) = (0, 0, − 1t ). Como α parametriza uma reta,
deveríamos esperar que o resultado fosse 0, aceleeração nula. Isso aconteceu por que a
parametrização não estava pelo comprimento de arco. Veja que a curva β(t) = (0, 0, et )
tem aceleração nula. Verifique também que β está parametrizada pelo comprimento
de arco.
Exercício: Prove que se ϕ : H → H é uma isometria então dϕ(∇ X Y ) = ∇dϕX dϕY.
Com a derivada covariante, podemos estudar a forma geométrica das superfícies
de H. Para isso, consideramos um campo N de vetores unitários e ortogonais a uma
38
Capítulo 5: Continuando o estudo
superficie dada. O quanto uma superfície S deixa de ser um plano hiperbólico pode ser
medido pela aplicação ∇ N : TS → TS. Podemos verificar, por exemplo, que quando
S é um plano hiperbólico, ∇ N : TS → TS é a aplicação nula.
Com a derivada covariante podemos voltar à questão das generalizações das
coordenadas esféricas em H, e em S3 também. Pode-se verificar que para as superfícies
ortogonais aos feixes de semirretas e retas, nos três casos, a aplicação ∇ N : TS → TS
é um múltiplo da identidade. Isto significa que as superfícies se curvam da mesma
maneira em todas as direções. No espaço euclidiano, esta propriedade caracteriza
as esferas euclidianas. Mais uma propriedade análoga propagada para o Espaço
Hiperbólico.
Projeto: Estude as formas das superfícies apresentadas aqui no contexto da Geometria
Hiperbólica.
5.3
Produto warped
Um dos objetivos básicos deste texto é iniciar o leitor na área de Geometria
Diferencial. ntão, vamos terminar com algumas orientações rápidas sobre como o
estudo poderia continuar.
Apresentamos neste texto sistemas de coordenadas que permitiram descrever
superfícies de rotação e cones. Contudo, não nos utilizamos destes sistemas de
coordenadas para estudar melhor estas superfícies. A razão é que não temos
ferramentas matemáticas suficientes para um estudo assim. Pelo menos, não as
encontramos neste texto.
Bom, com os conceitos apresentados neste capítulo já podemos pensar no acesso a
essas ferramentas. Com relação a conhecimentos sobre comprimento, área e volume,
o leitor pode aplicar conhecimentos sobre o Cálculo Integral em R3 , em particular a
fórmula de mudança de variável para integrais múltiplas.
Vamos falar um pouco mais sobre uma forma de produto que é bastante estudado
em Geometria Diferencial e muito útil em Física Matemática, a saber a noção de
produto warped. Principalmente, desenvolvemos aqui conceitos a partir da noção de
decomposição do espaço como um produto de dois fatores, mas um produto com
particularidades. Quando escrevemos o sistema de coordenadas ϕ : V × N → H(S3 ),
em todos os casos, esférico ou cilíndrico, no Espaço Hiperbólico ou Esférico, temos
as aplicações x ∈ V 7→ ϕ( x, y0 ) representando cópias de V, isto é, imagens de V por
uma isometria do espaço ambiente. Por outro lado, as aplicações y ∈ N 7→ ϕ( x0 , y)
representam objetos diferentes N, mas são objetos com mesma forma, só tamanho
diferente. Ou melhor, temos imagens de N por uma homotetia. O produto warped
é a definição de uma métrica riemanniana para um produto que leve em consideração
estas características.
Suponhamos que as métricas riemannianas definidas, respectivamente, para V e
para N sejam conhecidas, digamos, h, iV e h, i N . Então, é possível escolher uma função
diferenciável, ρ : V → (0, +∞) tal que a métrica riemanniana do ambiente, esférico ou
hiperbólico, possa ser expressa por
h, i = h, iV + ρ2 h, i N .
5.3: Produto warped
39
A função ρ multiplicando a métrica riemanniana de N indica a variação do segundo
fator como objeto homotético a N. Por exemplo, no caso euclidiano mesmo, nas
coordenadas esféricas, temos as cópias do segundo fator como esferas de raios
diferentes, todas figuras homotéticas entre si.
Para se aprofundar neste tema, recomendo ao leitor ler o livro de O’Neill ([11]). O
artigo Dajczer e Tojeiro ([3]) fala sobre o assunto no contexto de imersões isométrica,
conceito que generaliza a noção de superfícies, e é uma boa referência para se encontrar
as definições de cone, cilíndros e superfícies de rotação. Aliás, outro ótimo artigo que
se aprofunda no conceito de produto warped é o de Nölker ([10]).
Colocamos em discussão neste texto o problema de conceituar algumas superfícies
em Espaços não-Euclidianos por generalização. O propósito maior foi mesmo
apresentar estes objetos. O fato é que construções deste tipo têm se mostrado
uma importante fonte de exemplos para a compreensão de outros conceitos, como
o de superfície mínima. Alguns exemplos de pesquisas que se utilizaram das
generalizações consideradas aqui são [6], [9], [8] [2], [7], [4], [12].
Se o leitor quiser ver aplicações da noção de produto warped minha sugestão é ler
sobre o conceito de espaço-tempo de Robert-Walker também no livro de O’Neill ([11]),
assunto relacionado ao tema Relatividade Geral.
40
Capítulo 5: Continuando o estudo
Referências Bibliográficas
[1] CARMO, M. P.. Geometria Diferencial de Curvas e Superfícies. Textos
Universitários, SBM, 2005.
[2] CARMO, M. do, DAJCZER, M.. Rotation hypersurfaces in spaces of constant
curvature. Trans. Amer. Math. Soc., 277 (2) (1983), 685-709.
[3] DAJCZER, M., TOJEIRO, R., Isometric immersions in codimension two of
warped products into space forms. Illinois J. Math. 48 (3) (2004), 711-746.
[4] EJIRI, N.. A generalization of minimal cones. Trans. Am. Math. Soc. 276 (1983),
347-360.
[5] GREENBERG, M. J.. Euclidean and Non-Euclidean Geometry, W.H.Freeman,
New York, 1994.
[6] HSIANG, W. Y.. Generalized rotational hypersurfaces of constant mean
curvature in the Euclidean Spaces. I. J. Diff. Geom. 17 (1982), 337-356.
[7] MORI, H.. Minimal Surfaces of Revolution in H3 and Their Global Stability,
Indiana Univ. Math. J., 30 (5) (1981), 787-794.
[8] MOUTINHO, I.. G-variedades riemannianas como hipersuperfícies de formas
espaciais. Tese de Doutorado, Universidade Federal de São Carlos.
[9] MOUTINHO,
I.,
TOJEIRO,
R..
Polar
actions on compact Euclidean hypersurfaces. Annals Global An. Geom. 33 (4)
(2008), 323-336.
[10] NÖLKER, S., Isometric immersions of warped products. Diff. Geom. App. 6 (1996),
1-30.
[11] O´NEILL, B.. Semi-Riemannian Geometry, Academic Press, 1983.
[12] TAM, L.F., ZHOU, D.. Stability properties for the higher dimensional catenoid
in Rn+1 , Proceedings of the American Mathematical Society 137.10 (2009): 34513461.
41
Download