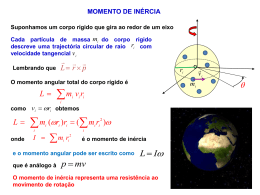
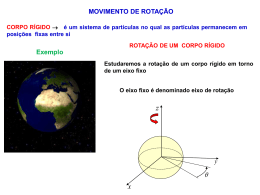
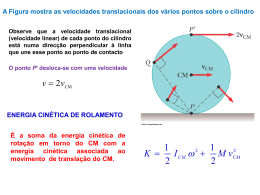
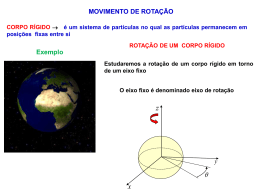
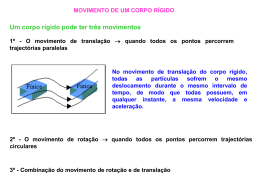
MOVIMENTO DE ROTAÇÃO CORPO RÍGIDO é um sistema de partículas no qual as partículas permanecem em posições fixas entre si ROTAÇÃO DE UM CORPO RÍGIDO Exemplo Estudaremos a rotação de um corpo rígido em torno de um eixo fixo O eixo fixo é denominado eixo de rotação z y x O sentido da rotação é dado pela regra da mão direita z positivo negativo MOMENTO DA FORÇA ( ou TORQUE) Quando empurramos uma porta, estamos aplicando uma força sobre a porta como consequência a porta vai girar em torno dum eixo fixo que passa pelas dobradiças. A tendência da força de rodar o corpo em torno de um eixo é medida por uma grandeza vectorial denominada momento da força (ou torque) r O momento da força é a causa dos movimentos rotacionais É análogo a força que causa variações no movimento translacional Definimos o momento da força por M rF O módulo do momento da força é M F M rF sin Corresponde ao produto da distância até o ponto de aplicação da força e a componente perpendicular da força. r APLICAÇÃO DUMA FORÇA EM PONTOS DIFERENTES NUMA PORTA Quando fechar uma porta, experimente fechá-la, empurrando-a no centro da porta (Figura a) e depois, aplicando a mesma força, empurre a porta na extremidade (Figura b). M rF sin A porta é fechada mais facilmente quando a força é aplicada na extremidade da porta O que é uma alavanca? É uma barra rígida apoiada (ponto de apoio O) utilizada para facilitar o deslocamento de um corpo pesado. A distância do ponto de apoio O, por onde passa o eixo de rotação, à linha de acção da força F, é denominada braço de alavanca, (L) Arquimedes disse: “Dê-me uma alavanca que moverei o mundo” M rF sin M (r sin ) F LF MOVIMENTO DE UM CORPO RÍGIDO Um corpo rígido pode ter três movimentos 1º - O movimento de translação quando todos os pontos percorrem trajectórias paralelas No movimento de translação do corpo rígido, todas as partículas sofrem o mesmo deslocamento durante o mesmo intervalo de tempo, de modo que todas possuem, em qualquer instante, a mesma velocidade e aceleração. Exemplo 2º - O movimento de rotação quando todos os pontos percorrem trajectórias circulares Movimento rotacional puro 3º - Combinação do movimento de rotação e de translação Movimento translacional + rotacional MOVIMENTO DE ROTAÇÃO E TRANSLAÇÃO DA TERRA ENERGIA CINÉTICA ROTACIONAL Suponhamos um corpo rígido que gira ao redor de um eixo z Cada partícula de massa mi do corpo rígido descreve uma trajectória circular de raio ri com velocidade tangencial v i Energia cinética de uma partícula do corpo rígido 1 K i mi vi2 2 Relação entre a velocidade tangencial e velocidade angular vi ri Substituindo em Ki Ki 1 1 mi 2 ri 2 mi ri 2 2 2 2 Energia cinética total 1 K total mi ri 2 2 2 i Não é uma nova forma de energia. A forma é diferente porque é aplicada a um corpo em rotação Unidade: joule (J) MOMENTO DE INÉRCIA 1 K R I 2 2 I mi ri 2 onde é o momento de inércia i Unidade: kg m 2 O momento de inércia representa uma resistência ao movimento de rotação No movimento rotacional o momento de inércia exerce o mesmo papel que a massa no movimento translacional Podemos reescrever a expressão do momento de inércia em termos de dm lim 2 2 I mi r m r 0 i i dm i MOMENTO DE INÉRCIA DE ALGUNS CORPOS RÍGIDOS O MOMENTO ANGULAR Definimos inicialmente o momento angular partícula com momento linear p . L r p L é o momento angular instantâneo L de uma L r p em relação à origem O p m r Note que a partícula não precisa estar girando em torno de O para ter momento angular em relação a este ponto a rotação não é necessária para o momento angular MOSTRAREMOS QUE O MOVIMENTO ROTACIONAL TEM UMA LEI DE MOVIMENTO SEMELHANTE À SEGUNDA LEI DE NEWTON Derivando o momento angular L em relação ao tempo: dL d dr dp (r p) p r dt dt dt dt =0 como f dp dt dL r f M dt ou dL M dt análogo à segunda lei de newton A relação acima é válida também para um sistema de partículas onde o momento angular é a soma vectorial dos momentos angulares de cada partícula em relação ao mesmo ponto fixo O A mesma relação é válida para um corpo rígido, em rotação em torno de um ponto O. dL M dt A soma dos momentos das forças internos são nulos e M corresponde à um momento da força externo resultante dp f dt O MOMENTO ANGULAR DE UM CORPO RÍGIDO Suponhamos um corpo rígido que gira ao redor de um eixo z Lembrando que L r p O momento angular total do corpo rígido será L m v r i i i i como vi ri obtemos L 2 m ( r ) r ( m r i i i i i ) i e I i 2 m r ii é o momento de inércia e o momento angular pode ser escrito como que é análogo à p mv L I O momento de inércia representa uma resistência ao movimento de rotação CONSERVAÇÃO DO MOMENTO ANGULAR Quando dL M r f 0 L constante dt se i ) f 0 ou ii) r 0 M 0 ou L constante Li L f Análogo ao que acontece com o momento linear pi p f CONSERVAÇÃO DO MOMENTO ANGULAR Li L f Exemplo I mR 2 L I Quando a bailarina faz pirueta o momento de inércia I diminui a velocidade angular aumenta L I cte. Iii I f f iii) quando a força é colinear com o vector posição teremos também M 0 Exemplo: FORÇAS CENTRAIS, que são forças da forma F (r ) f (r ) u Neste caso: dL M r f (r )u 0 dt L constante Exemplo Dados R e vi pede-se: a) vf em função do raio r; b) o trabalho da força F. vi Como a força é central, o momento angular em relação a O se conserva: m vi R m v f r F Rvi vf r O trabalho da força é dado por rf 2 1 1 1 2 2 2 R r F (r )dr 2 m v f 2 m vi 2 m vi r 1 i EXEMPLO 1: CONSERVAÇÃO DO MOMENTO ANGULAR No sistema homem - halteres só há forças internas e, portanto: L I constante f I f i I i Com a aproximação dos halteres ( I i i I f f If < Ii ) a velocidade angular do sistema aumenta EXEMPLO 2: CONSERVAÇÃO DO MOMENTO ANGULAR Queremos calcular a velocidade angular final do sistema após o homem inverter o eixo de rotação da roda de bicicleta Dados Ibic 1, 2 kg.m2 ; Itot 6,8 kg.m2 e i 3,9 rot/s Momento angular inicial do sistema bicicleta-homem (+ banco) roda de Li Lbic I bici Agora o homem inverte o eixo de rotação da roda de bicicleta Lbic Li EXEMPLO 2 (cont): CONSERVAÇÃO DO MOMENTO ANGULAR Momento angular final do sistema: L f Lbic Lmen Lmen Li Há conservação do momento angular uma vez que só há forças internas no sistema L f Li Lmen Li Li Lmen 2 Li I tot 2I bici 2 I bic i 1,4 I tot rot/s Exemplo 3: CONSERVAÇÃO DO MOMENTO ANGULAR No caso da mergulhadora da figura ao lado o CM segue um movimento parabólico I mi ri i LL onde dL 0 L const. dt L e o momento angular da nadadora é constante durante o salto. Juntando braços e pernas, ela pode aumentar sua velocidade angular em torno do eixo que passa pelo CM, às custas da redução do momento de inércia em relação a este eixo Mg Mg QUANDO O MOMENTO ANGULAR VARIA COM O TEMPO dL d d ( I ) I I dt dt dt ou M I que é semelhante à equação de Newton F ma ROLAMENTO DE UM CORPO RÍGIDO Consideramos que um cilindro gira de um ângulo O centro de massa desloca-se de s r PARA O MOVIMENTO DE ROLAMENTO PURO Velocidade do centro de massa vCM ds d R R dt dt Aceleração do centro de massa aCM dvCM d R R dt dt . A Figura mostra as velocidades translacionais dos vários pontos sobre o cilindro Observe que a velocidade translacional (velocidade linear) de cada ponto do cilindro está numa direcção perpendicular à linha que une esse ponto ao ponto de contacto O ponto P’ desloca-se com uma velocidade v 2vCM ENERGIA CINÉTICA DE ROLAMENTO É a soma da energia cinética de rotação em torno do CM com a energia cinética associada ao movimento de translação do CM. 1 1 2 2 K I CM M vCM 2 2 COMBINAÇÃO DO MOVIMENTO DE TRANSLAÇÃO E ROTAÇÃO Translação pura Rotação pura vCM vCM vCM v vCM R Translação + Rotação 2 vCM v R v 0 = v R v R acima do centro v R abaixo do centro vCM v 0 O ponto de contacto está sempre em repouso FOTOGRAFIA DE UMA RODA EM ROLAMENTO Os raios de cima estão menos nítidos que os de baixo porque estão se movendo mais depressa Rolamento sobre um plano inclinado Exemplo 1 Na direção y: N Mg cos 0 (1) Na direção x: Mg sin Fa MaCM (2) vCM A força de atrito produz um momento da força (MO) em relação ao CM: M O Fa R I CM (3) Da condição de rolamento sem deslizamento: aCM R aCM R Tiro o valor de Fa em (3): N y vCM (4) x Fa I CM aCM /R Substituindo em (2) a fica: I Mg sin CM2 aCM MaCM R 2 Fa Mg cos Mg sin Mg Exemplo 1 (continuação) aCM Mg sin g sin I CM M 2 R 1 / 2 M 2 / 3 I M CM2 5 / 7 R Temos ainda : Fa N y vCM e x Fa Mg sin Mg cos anel Mg cilindro esfera I CM I CM Mg sin Mg sin a CM 2 2 2 MR 2 R M ( I CM / R ) R 1 I CM À medida que aumenta a inclinação do plano a força de atrito estático necessária para evitar o deslizamento vai aumentando. No limite, antes do deslizamento, temos Fa Fe max assim Fa Fe max e Mg cos MR 2 tan e ( 1 ) tan r I CM Mg sin e Mg cos MR 2 1 I CM r e ângulo máximo (limiar) para que haja rolamento sem deslizamento ROTAÇÃO EM TORNO DE UM EIXO FIXO Tabela de equivalências Rotação em torno de um eixo fixo Energia cinética Equilíbrio 2a lei de Newton 2a lei de Newton Momento Conservação Potência 1 KR I2 2 Movimento de translação 1 K mv 2 2 M 0 f 0 M I f ma L I Li L f P M p mv p i p f dL M dt Momento de inércia dp f dt P F v I massa m
Baixar