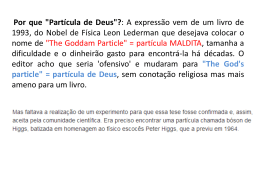
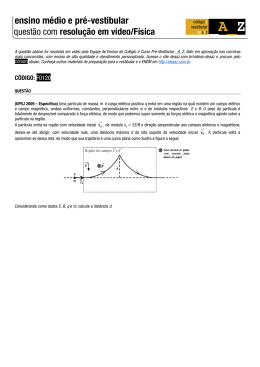
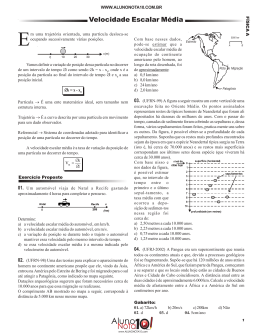
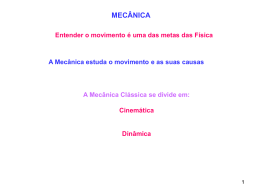
Aula 09: Dinâmica da partícula: Força e Quantidade de Movimento. Impulso e Quantidade de Movimento. Força e Quantidade de Movimento As leis de Newton do movimento foram formuladas para uma única partícula. Se a massa m da partícula é multiplicada pela sua velocidade v, o produto resultante é denominado quantidade de movimento linear, ou p = mv . (73) A velocidade v é medida com relação a um sistema inercial de tal forma que, se a posição da partícula é definida pelo seu vetor deslocamento r, a velocidade é v = r& . A segunda lei de Newton atesta que a taxa temporal de variação da quantidade de movimento linear é igual à força aplicada à partícula, e a variação ocorre no mesmo sentido de atuação da força. F = p& . (74) Se m é constante então a Equação (74) pode ser escrita como F = mv& = m&r& . (75) A primeira lei de Newton, que é a base da estática, é um caso especial da segunda lei quando a força F é zero. Ela atesta que, se as forças que atuam sobre uma partícula tem uma resultante nula ( F = p& = 0 ), a partícula permanece em repouso ( p = 0 ), ou continua a mover numa linha reta com velocidade (ou quantidade de movimento linear) constante. Impulso e Quantidade de Movimento Se a força F é multiplicada pelo tempo dt e é integrada, obtém-se ∫ t2 t1 t2 Fdt = ∫ m t1 dv dt = mv 2 − mv 1 . dt (76) Fig. 19 - Quantidade de movimento antes do impacto deve ser igual a quantidade de movimento após o impacto. 27 A integral à esquerda da Equação (76) é chamada de impulso da força. Assim, a Equação (76) nos diz que a variação na quantidade de movimento da partícula é igual ao impulso da força atuando na partícula. Quando dois corpos colidem, uma força de grande intensidade, f (t ) , atua num curto espaço de tempo, e o impulso, ∫ f (t )dt , exercido sobre cada um dos corpos, deve ser igual e oposto de acordo com a terceira lei de Newton. Uma vez que impulso é igual a variação de quantidade de movimento, para os dois corpos considerados juntos como um sistema, os impulsos da colisão se cancelam. Então, a variação da quantidade de movimento do sistema é zero, e a quantidade de movimento antes do impacto é igual a quantidade de movimento após o impacto. Energia, entretanto, é geralmente dissipada durante o impacto, o que ocorre no caso da duração da fase de relaxação ser menor que a duração da fase de compressão. Para um impacto central vamos chamar essa relação de e, o coeficiente de restituição, e é possível mostrar que e também se expressa em termos das velocidades como e= (∫ f dt ) (∫ f dt ) relax . compr . = v 2 − v1 Velocidade de separação = , V1 − V2 Velocidade de aproximação (77) onde a seqüência de eventos está ilustrada na Fig. 19. Então, quando a energia não é dissipada, o impacto é elástico e e = 1, enquanto para o impacto completamente plástico o impulso de relaxação é zero e e = 0. Em geral e depende do material, forma e velocidades dos dois corpos♠. ♠ Exemplo. Um plástico de honeycomb tem uma tensão de compressão de σ c lb/in2. Se um pacote de massa m é abandonado de uma altura h, sem exceder uma desaceleração de ng, determine a seção e a espessura do plástico para suportar a queda. Fig. 20 Referindo-se a Fig. (20), suponha que ξ seja o deslocamento de compressão do honeycomb. A equação de força é mξ&& = mg − σ c A = −m(ng ) , e sua integral é σ A ξ& = g − c t + v 0 . m Da Equação (78) sai a área requerida mg A= (1 + n ) , σc (78) (79) (80) que substituída em (79) dá ξ& = −ngt + v 0 . A máxima compressão ocorre quando ξ& = 0 , ou 28 (81) Aula 10: Dinâmica da partícula: Trabalho e Energia. Momento Angular. Trabalho e Energia Se a força F, atuando sobre uma partícula, move a mesma através de uma distância dr, o trabalho realizado é igual ao produto escalar F • dr . O trabalho total realizado para ir de r1 até r2 é então r2 W = ∫ F • dr . (84) r1 Substituindo a força F e mudando a variável de integração para o tempo, através de dr = vdt , tem-se ∫ r2 r1 t2 F • dr = ∫ m t1 1 t2 d dv • vdt = ∫ m (v • v )dt 2 t1 dt dt 1 t2 d 1 1 = ∫ m v 2 dt = mv 22 − mv12 . t 2 1 dt 2 2 (85) 1 2 mv é chamada energia cinética da partícula. Dessa 2 forma, o trabalho realizado pela força sobre a partícula é igual a variação da energia cinética da partícula. Agora, vamos definir um sistema de forças conservativas no qual o trabalho realizado é função apenas da posição e independe do percurso realizado pela força. Segue, portanto, que o trabalho realizado por um sistema de forças conservativas ao longo de qualquer trajetória fechada, é nulo A quantidade escalar ∫ F • dr = 0 . (86) Vamos agora definir a energia potencial U (r1 ) como sendo o trabalho realizado pela força conservativa para ir de qualquer ponto r1 até algum ponto de referência r0 . U (r1 ) ≡ ∫ F • dr . r0 (87) r1 t= v0 . ng (82) Integrando (81) e substituindo (82), a compressão do material é dada por ξ =− ng 2 2 v0 v 1 v 02 h + v 0 0 = = . ng ng 2 ng n 29 (83) Então, cada ponto do espaço pode ser associado com um potencial escalar U (r ) que irá depender do potencial do ponto de referência. Considere, agora, o trabalho realizado por uma força conservativa para ir de r1 até r2 . Uma vez que o trabalho realizado independe da trajetória escolhida, podemos ir de r1 até r0 e de r0 até r2 , como segue ∫ r2 r1 r0 r2 r1 r0 F • dr = ∫ F • dr + ∫ F • dr = ∫ F • dr − ∫ F • dr = U (r1 ) − U (r2 ) . r0 r0 r1 r2 (88) Então, o trabalho realizado para ir de r1 até r2 é a diferença no potencial escalar − [U (r2 ) − U (r1 )] , e é evidente que o resultado independe do ponto de referência. Para um deslocamento infinitesimal tem-se que F • dr = −dU , (89) que expressa a relação entre a força conservativa e o potencial ou energia potencial. Observe que essa discussão mostra claramente a razão da escolha arbitrária do ponto de referência da energia potencial na elaboração das equações do movimento, que são equações de força e torque. Num sistema conservativo a energia total é constante. Se designarmos energia cinética pela letra T, a Equação (85) pode ser escrita como ∫ r2 r1 F • dr = T2 − T1 = −(U 2 − U 1 ) . (90) Rearranjando, as energias totais em 1 e 2 podem ser vistas como T2 + U 2 = T1 + U 1 , (91) que ilustra o princípio da conservação da energia para um sistema conservativo. Um exemplo de sistema de forças conservativo é a atração gravitacional da Terra, que é inversamente proporcional ao quadrado da distância do centro da Terra, 2 R F = mg , r (92) onde g é a aceleração da gravidade na superfície da Terra e R é o raio da Terra. Se usarmos a superfície da Terra como referência, a energia potencial, ou potencial de uma massa m a uma altura h da superfície é 2 1 1 R U (h ) = ∫ − mg • dr = mgR 2 − R +h R R+h r h = mg . h 1 + R R 30 (93) Então, para alturas moderadas acima da superfície da Terra, h/R é pequeno, e tem-se, para a energia potencial, a seguinte expressão U (h ) ≅ mgh . (94) Momento Angular O momento, em torno de um ponto arbitrário O, da quantidade de & de uma partícula, ou momento angular, é movimento linear p = mR &, h O = r × mR (95) & é a velocidade absoluta da partícula de massa m e r é o raio vetor indo de O onde R até a partícula, como está mostrado na Fig. 21. Diferenciando a Equação (95) obtémse && + r& × mR &. h& O = r × mR (96) & é r × mR & . Fig. 21 – O momento em torno de O da quantidade de movimento mR & =R & + r& na Equação (96) e sabendo que r& × r& = 0 , tem-se Substituindo R O && − R & × mr& . h& O = r × mR O (97) && Para estabelecer a relação entre h& O e o momento M O das forças F = mR que atuam sobre a partícula, devemos lembrar que && = r × m(R && + &r&) M O = r × mR O d && × mr . = (r × mr& ) − R O dt (98) && na Equação (97), tem-se Substituindo M O = r × mR 31 & × mr& . M O = h& O + R O (99) Várias conclusões interessantes podem ser tiradas das Equações (98) e (99), como segue: & , que resulta & =R && = 0 e r& = R a) Se o ponto O é fixo no espaço, então R O O na equação simplificada M O = h& O . && = 0 , e b) Se o ponto O está movendo com velocidade constante, então R O MO = d (r × mr& ) , dt que atesta que o momento é igual a taxa de variação do momento angular aparente, que é expresso em termos da velocidade relativa r& . && e r ou R & e r& são paralelos, de novo são válidas as equações c) Se R O O simplificadas. d) Se o sistema consiste de mais de uma partícula, então o segundo termo da && × ∑ mr , que é zero (∑ mr = 0 ) quando o Equação (98) torna-se − R O ponto O coincide com o centro de massa do sistema de partículas. A equação do momento é a mesma do caso (b)*. * Exemplo. Uma haste rígida ideal de comprimento l, sem massa, com duas partículas de massa m nas extremidades é abandonada sem rotação e a massa esquerda colide com um degrau com velocidade v. Considerando o coeficiente de restituição e, determine a rotação angular da haste imediatamente após o impacto. Fig. 22 A Fig. 22 mostra a haste imediatamente após o impacto. A velocidade do centro de massa após o impacto é ev − (l / 2 )θ& . Aqui se considera que a haste, após o impacto, sobe com velocidade ev e ao mesmo tempo inicia um movimento de rotação em torno do centro da massa à esquerda. A variação na quantidade de movimento do centro de massa é l (100) ∫ fdt = 2m ev − 2 θ& − (− 2mv ) . O momento da força em torno do centro de massa é igual à variação no momento angular em torno do centro de massa. Integrando a expressão do momento da força obtém-se o momento do impulso em torno do centro de massa, 2 l l fdt = 2m θ& . ∫ 2 2 Eliminando a integral do impulso, a velocidade angular imediatamente após o impacto é v θ& = (1 + e ) . l 32 (101) (102)
Baixar