CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
Luiz Francisco da Cruz – Departamento de Matemática – Unesp/Bauru
CAPÍTULO 5
RETA
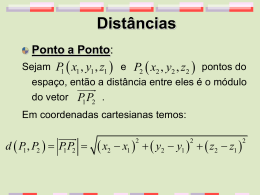
Definição: Seja (r) uma reta que contém um ponto A e tem a direção de um vetor
r
r r
v , com v ≠ 0 . Para que um ponto X do ℜ3 pertença à reta (r) deve ocorrer que os
r
r
vetores AX e v sejam paralelos. Assim, existe um escalar t ∈ ℜ tal que: AX = tv
r
r
⇒ X − A = tv ⇒ X = A + tv . Esta expressão é chamada de equação vetorial da
reta.
Observe que, para escrevermos a equação vetorial de uma reta
r
r
(r) : X = A + tv , sempre necessitamos conhecer um ponto A de (r) e um vetor v
r
paralelo a ela. O vetor v é chamado de vetor diretor da reta (r) e t ∈ ℜ é
chamado de parâmetro.
z
X
AX
A
r
v
(r)
y
x
Por um axioma importante da geometria plana, dois pontos distintos, A e B,
determinam uma reta. Logo, podemos escrever a equação vetorial da reta quando
se conhece dois pontos pertencentes a ela, da seguinte forma: podemos considerar
o vetor diretor da reta (r) como sendo o vetor AB ou BA , pois ambos são paralelos
a reta (r), assim como podemos escolher qualquer um dos pontos A ou B e
escrever que (r) : X = A + t ⋅ AB ou (r) : X = A + t ⋅ BA ou (r) : X = B + t ⋅ AB ou ainda
(r) : X = B + t ⋅ BA .
A
AB
B
A
AB
B
(r)
(r)
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
Luiz Francisco da Cruz – Departamento de Matemática – Unesp/Bauru
Por exemplo: considere a reta (r) determinada pelos pontos A(1,3,0) e B(-1,2,1).
Então
podemos
escrever
que
(r) : X = A + t ⋅ AB ,
∀ t ∈ℜ
⇒
(r) : X = (1,3,0) + t ⋅ (−2,−11) que é a equação vetorial da reta (r). Assim, para cada
valor real do parâmetro t substituído na equação vetorial da reta vamos obter seus
infinitos pontos, ou seja:
para t1 = 0 ⇒ X1 = (1,3,0) + 0 ⋅ (−2,−11) ⇒ X1 = (1,3,0) ∈ (r) ;
para t 2 = 1 ⇒ X 2 = (1,3,0) + 1 ⋅ (−2,−11) ⇒ X 2 = (−1,4,1) ∈ (r) ;
para t 3 = −4 ⇒ X 3 = (1,3,0) + (−4) ⋅ (−2,−11) ⇒ X 3 = (9,7,−4) ∈ (r) ;
Assim por diante.
5.1 Equações da Reta
Equações Paramétricas da Reta
Sejam X(x, y, z) e A(x o , y o , z o ) onde, A é o ponto conhecido da reta e X
r
representa qualquer ponto da reta, para algum valor de t ∈ ℜ . Seja v = (x1, y1, z1) o
r
vetor diretor da reta (r). Assim, sua equação vetorial é (r) : X = A + tv . Substituindo
as coordenadas de cada elemento da reta teremos:
x = x o + x1 t
(x, y, z) = (x o , y o , z o ) + (x1 , y1 , z1 ) ⋅ t ⇒ (r) : y = y o + y1 t , ∀ t ∈ ℜ . Esta forma de
z=z +z t
o
1
escrever é chamada de equações paramétricas da reta (r).
Equações Simétricas da Reta
x − xo
t =
x1
x = xo + x1t
y − yo
Das equações paramétricas (r) : y = yo + y1t , podemos escrever: t =
.
y1
z = z +z t
o
1
z − zo
t = z
1
Então: (r) :
x − xo
y − yo
z − zo
=
=
x1
y1
z1
para
x1 ≠ 0, y1 ≠ 0 e z1 ≠ 0 . Esta forma de
escrever a equação da reta é chamada de equações simétricas.
5.2 Condição de alinhamento de três pontos
Sejam P1(x1, y1, z1), P2(x2 , y2 , z2 ) e P3(x3, y3, z3 )
três pontos colineares, ou
seja, alinhados. Logo, eles pertencem à mesma reta (r). Seja (r) a reta
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
Luiz Francisco da Cruz – Departamento de Matemática – Unesp/Bauru
determinada pelos pontos P1 e P2. Então (r) :X = P1 + tP1P2 . Na forma simétrica
(r) :
x − x1
y − y1
z − z1
=
=
. Como P3 pertence à reta (r), ele satisfaz a equação
x2 − x1 y2 − y1 z2 − z1
de (r), ou seja:
x3 − x1 y3 − y1 z3 − z1
. Esta relação é chamada de condição de
=
=
x2 − x1 y2 − y1 z2 − z1
alinhamento de três pontos, desde que x2 − x1 ≠ 0 , y 2 − y1 ≠ 0 e z 2 − z1 ≠ 0 .
Exemplo (1): Dadas as retas na forma simétrica, destacar o ponto e o vetor
diretor de cada uma.
a) (r) :
x−2
z+5
= y −1 =
−3
2
b) (s) :
2x − 2
3−z
= −y − 1 =
3
−2
x−
c) (m) :
2
1
3 = 2z − 5 e y = −4
Solução: Lembre que, uma reta está na forma simétrica quando sua equação é
escrita como (r) :
x − xo
y − yo
z − zo
=
=
x1
y1
z1
para
x1 ≠ 0, y1 ≠ 0 e z1 ≠ 0 , ou seja,
quando os coeficientes das variáveis x, y e z são todos iguais a 1. Neste caso, as
coordenadas (−xo ,−yo ,−zo ) , que aparecem no numerador destas proporções são as
coordenadas do ponto A da reta e as coordenadas (x1 , y1 , z1 ) são as coordenadas
do vetor diretor.
a) (r) :
A(2,1,−5)
x − 2 y −1 z +5
=
=
⇒ r
−3
1
2
v = (−3,1,2)
b) A reta (s) não está adequadamente escrita na forma simétrica. Fazendo:
2x 2
−y
1
3
z
−
−
−
2
2
−
1
−
1
−
1
−
1.
(s) :
=
=
3
1
−2
2
−1
−1
(s) :
Agora,
na
forma
simétrica,
vem:
A(1,−1,3)
x − 1 y + 1 z − 3 r
3
=
=
⇒
v = ,−1,2
3
−1
2
2
2
c) Neste caso em que temos um termo y = −4 , escrevendo a equação na forma
x−
paramétrica, vem: (m) :
2
1
3 = 2z − 5 e y = −4
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
Luiz Francisco da Cruz – Departamento de Matemática – Unesp/Bauru
1
x − 3
1
= t ⇒ x = + 2t
x =
3
2
⇒ y = −4 ⇒ y = −4 + 0t ⇒ (m) : y =
5 1
2z − 5 = t ⇒ z = +
z =
2
2
1
1
5
+ 2t
A ,−4,
3
3
2
−4 + 0t ⇒
r
v = 2,0, 1
5 1
+ t
2
2 2
Exemplo (2): Dada a reta (r) : X = (1,1,−3) + t(2,3,1) , verificar se os pontos P(5,7,-
1) e Q(-5,-8,-2) pertencem à reta.
Solução: Se um ponto pertence a uma reta, ele deve satisfazer a equação
simétrica da reta.
(r) :
x −1 y −1 z + 3
5 − 1 7 − 1 −1 + 3
=
=
⇒
=
=
⇒ 2 = 2 = 2 ⇒ P ∈ (r)
2
3
1
2
3
1
(r) :
x −1 y −1 z + 3
−5 − 1 −8 − 1 −2 + 3
=
=
⇒
=
=
⇒ − 3 = −3 ≠ 1 ⇒ Q ∉ (r)
2
3
1
2
3
1
5.3 Condição de coplanaridade entre duas retas
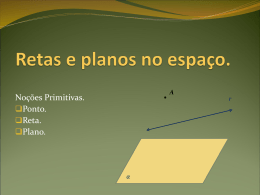
Dizemos que duas retas são coplanares se elas estão contidas no mesmo
plano. Caso não exista um plano que as contém dizemos que elas não são
coplanares. Por exemplo: as retas r2 e r3 são coplanares, pois estão contidas no
mesmo plano β . As retas r1 e r2 não são coplanares, pois estão contidas em planos
distintos. O mesmo ocorre entre as retas r1 e r3, são retas não coplanares.
α
r1
r2
r3
β
r
r
Sejam (r1) : X1 = A1 + t1v1 e (r2 ) : X2 = A2 + t2v2 duas retas coplanares com
r
r
A1(a1, b1, c1) , A 2 (a2 , b 2 , c 2 ) , v1 = (x1, y1, z1) e v2 = (x2 , y2 , z2 ) . Note que, se as
r
r
retas são coplanares, então os vetores v1 , v 2 e A1 A 2 são coplanares.
(r1)
r
v1
A1
A1 A 2
A2
r
v2
(r2)
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
Luiz Francisco da Cruz – Departamento de Matemática – Unesp/Bauru
Logo, a condição de coplanaridade entre as retas é a mesma condição de
r
r
coplanaridade entre os vetores v1 , v 2 e A 1 A 2 . Portanto:
r r
[A1A2 , v1, v2 ] =
a2 − a1 b2 − b1 c2 − c1
x1
y1
z1
x2
y2
z2
=0
5.4 Posições Relativas entre duas retas
As posições relativas entre duas retas (r1) e (r2) são divididas em dois casos:
I- Retas coplanares. Se (r1) e (r2) são retas coplanares então suas posições
relativas são: paralelas ou concorrentes;
II- Retas não coplanares. Se (r1) e (r2) são retas não coplanares a única posição
relativa entre elas é reversas.
Existem alguns casos particulares como:
•
Retas coincidentes é um caso particular quando as retas são paralelas.
•
Retas
perpendiculares
é
um
caso
particular
quando
as
retas
são
concorrentes.
•
Retas ortogonais é um caso particular quando as retas são reversas.
Para uma melhor discussão das posições relativas entre duas retas e, de uma
forma fácil e rápida distinguir um caso do outro, vamos analisar cada posição
relativa entre duas retas (r1) e (r2).
r
r
Considere duas retas (r1 ) : X1 = A 1 + t1 v1 e (r2 ) : X2 = A 2 + t2 v 2 .
I
-
Retas coplanares:
r r
[A1A2 , v1, v2 ] = 0 .
Se
as
retas
(r1)
e
(r2)
são
coplanares
então
1) Retas Paralelas: São retas coplanares, não se interceptam e o ângulo entre
elas é θ = 0 o . Analisando a dependência linear entre os vetores podemos concluir:
r r
r
{v1, v2} LD (paralelos)
v1
A1
r
(r1 )
A1A2
{v1, A1A2} LI (não paralelos)
r
(r2 )
A2
v2
r
{v2, A1A2} LI (não paralelos)
Usaremos a notação (r1 ) ∥ (r2 ) para indicar retas paralelas.
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
Luiz Francisco da Cruz – Departamento de Matemática – Unesp/Bauru
2) Retas Coincidentes: São retas coplanares, uma está posicionada inteiramente
sobre a outra, a interseção entre elas é uma delas e o ângulo entre elas é θ = 0 o .
Analisando a dependência linear entre os vetores podemos concluir:
r r
{v1, v2} LD (paralelos)
r
r
A1 A 2
v1
v2
r
{v1, A1A2} LD (paralelos)
(r1 ) ≡ (r2 )
r
{v2, A1A2} LD (paralelos)
Usaremos a notação (r1 ) ≡ (r2 ) para indicar retas coincidentes.
3) Retas Concorrentes: São retas coplanares, se interceptam num ponto P e o
ângulo entre elas é θ ≠ 90o . Analisando a dependência linear e o produto escalar
entre os vetores podemos concluir:
r r
{v1, v2} LI (não paralelos)
r r
v1 ⋅ v2 ≠ 0
r
v1
r
v2
P
θ
(r2 )
(r1 )
4) Retas Perpendiculares: São retas coplanares, se interceptam num ponto P e o
ângulo entre elas é θ = 90o . Analisando a dependência linear e o produto escalar
entre os vetores podemos concluir:
r r
{v1, v2} LI (não paralelos)
r r
v1 ⋅ v2 = 0
(r2 )
(r1 )
r
v1
P
r
v2
θ
Usaremos a notação (r1 ) ⊥ (r2 ) para indicar retas perpendiculares.
II - Retas não coplanares: Se as retas (r1) e (r2) não são coplanares então
r r
[A 1 A 2 , v1 , v 2 ] ≠ 0 .
1) Retas Reversas: São retas não coplanares, não se interceptam e o ângulo
entre elas é θ ≠ 90o . Analisando a dependência linear e o produto escalar entre os
vetores podemos concluir:
r r
{v1, v2} LI (não paralelos)
r
r
v1 ⋅ v 2 ≠ 0
r
v1
(r1 )
r
v1
(r2 )
r
v2
θ
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
Luiz Francisco da Cruz – Departamento de Matemática – Unesp/Bauru
2) Retas Ortogonais: São retas não coplanares, não se interceptam e o ângulo
entre elas é θ = 90 o . Analisando a dependência linear e o produto escalar entre os
vetores podemos concluir:
r r
{v1, v2} LI (não paralelos)
r
r
v1 ⋅ v 2 = 0
r
v1
(r1 )
θ
(r2 )
r
v1
r
v2
Com base a análise feita acima, sugerimos o seguinte resumo para
distinguirmos as posições relativas entre duas retas (r1) e (r2).
r
r
Resumo: Sejam (r1) : X1 = A1 + t1v1 e (r2 ) : X2 = A2 + t2v2 .
r r
I - Retas Coplanares ⇒ [A1A 2 , v1 , v2 ] = 0
r r
r
1) Retas Paralelas: {v1, v2} LD (paralelos) e {v1, A1A2} LI (não paralelos).
r r
r
2) Retas Coincidentes: {v1, v2} LD (paralelos) e {v1, A1A2} LD (paralelos).
r r
r r
3) Retas Concorrentes: {v1, v2} LI (não paralelos) e v1 ⋅ v2 ≠ 0 .
r r
r r
4) Retas Perpendiculares: {v1, v2} LI (não paralelos) e v1 ⋅ v2 = 0 .
r r
II - Retas não Coplanares ⇒ [A1A 2 , v1 , v2 ] ≠ 0
r
r
1) Retas Reversas: v1 ⋅ v 2 ≠ 0
r r
2) Retas Ortogonais: v1 ⋅ v2 = 0
Exemplo (3): Dadas as retas (r) :
x −3 y − 4 z +1
x +1
z−5
= y−2 =
e (s) :
=
=
,
−2
2
4
2
−3
verificar a posição relativa entre elas e determinar a interseção se houver.
A (−1,2,5)
A (3,4,−1)
Solução: Para a reta (r) temos: r 1
e para (s) temos: r 2
.
v1 = (2,1,−3)
v2 = (−2,2,4)
Vamos determinar
r r
[A 1 A 2 , v1 , v 2 ]
r r
coplanares. Então: [A1A2 , v1, v2 ] =
para sabermos se as retas são ou não
4 2 −6
2 1 − 3 = 0 . Logo as retas são coplanares.
−2 2
4
r r
r r
Como {v1, v2} LI (não paralelos) e v1 ⋅ v2 = −14 ≠ 0 , as retas são concorrentes e
existe a interseção entre elas que é um ponto P(x,y,z). Para determinar a
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
Luiz Francisco da Cruz – Departamento de Matemática – Unesp/Bauru
interseção devemos igualar as equações das retas (r) e (s). Assim, das retas (r) e
(s) podemos escrever:
x +1
x − 3 y − 4
= y − 2 ⇒ x = 2y − 5
=
⇒ x = −y + 7
2
2
(r):
e (s): − 2
z −5
z + 1 = y − 4 ⇒ z = 2y − 9
= y − 2 ⇒ z = −3y + 11
4
− 3
2
2y − 5 = −y + 7 ⇒ y = 4 e − 3y + 11 = 2y − 9 ⇒ y = 4 . Voltando a equação de (r) ou
(s) e fazendo y = 4, teremos, x = 3 e z = -1. Portanto, a interseção de (r) com (s)
é o ponto P(3,4,-1).
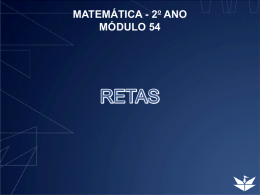
Exemplo (4): Determine os pontos de furos da reta (r) :
x
y−4
=
= z−4.
−3
4
Solução: Pontos de furo de uma reta, são os pontos P1, P2 e P3, interseção da
reta com os planos coordenados yz, xz e xy, respectivamente. Para determinar o
ponto onde a reta "fura" o plano yz, basta fazer a coordenada x = 0 na equação da
reta e determinar as outras coordenadas y e z. Analogamente para y = 0 e z = 0,
para determinar os pontos de furo sobre os planos xz e xy. Assim:
y − 4 0
=
⇒ y=4
3
x = 0⇒ 4
⇒ P1(0,4,4)
z − 4 = 0 ⇒ z = 4
3
0−4
x
− 3 = 4 ⇒ x = 3
y = 0⇒
⇒ P2(3,0,3)
z − 4 = 0 − 4 ⇒ z = 3
4
x
= 0 − 4 ⇒ x = 12
z = 0 ⇒ − 3
⇒ P3(12,−12,0)
y − 4 = 0 − 4 ⇒ y = −12
4
Vamos representar estes pontos no ℜ3 e também a reta (r).
z
(r)
4
3
P1
P2
y
-12
4
3
12
P3
x
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
Luiz Francisco da Cruz – Departamento de Matemática – Unesp/Bauru
Exemplo (5): Determine a equação da reta (s) que é perpendicular à reta
(r) : X = (2,0,0) + t(3,1,−1) e passa pelo ponto M(2,1,-1).
Solução: Vamos determinar o ponto Q(x,y,z) que a interseção das retas (r) e (s) e
escrever a equação da (s) que passa pelos pontos M e Q da seguinte forma
(s) : X = M + t ⋅ QM . Pela figura podemos notar que o vetor QA é paralelo ao vetor
r
v , e ortogonal ao vetor QM . Então:
r
r
QA // v ⇒ QA = α ⋅ v ⇒ (2 − x,−y,−z) = α ⋅ (3,1,−1) ⇒
M
2 − x = 3α ⇒ x = −3α + 2
Q: − y = α ⇒ y = −α
− z = −α ⇒ z = α
QM
(r)
QA
A
r
v
Q
r
r
QM ⊥ v ⇒ QM ⋅ v = 0
(s)
(2 − x,1 − y,−1 − z) ⋅ (3,1,−1) = 0 ⇒ − 3x − y + z + 8 = 0
− 3(−3α + 2) − (−α) + α + 8 = 0 ⇒ α = −
2
11
2
+2
x = −3 ⋅ −
11
2
⇒
Determinando o ponto Q: y = − −
11
2
z = − 11
2
28 2
Q
,
,−
. Assim o vetor
11
11
11
28
2
2 6 9
9
QM = 2 −
,1 −
,−1 +
,
,−
= −
. Com QM é o vetor diretor da reta
11
11
11 11 11 11
(s), podemos tomar qualquer vetor paralelo a ele para ser o vetor diretor da reta
r
11
(s). Em particular seja u = −
⋅ QM = (2,−3,3) . Portanto a reta (s) será escrita
3
r
como X = M + t ⋅ u , ou seja, (s) : X = (2,1,−1) + t ⋅ (2,−3,3) . Na forma simétrica
(s) :
x −2 y −1 z +1
=
=
.
−3
2
3
Exercícios Propostos
1) Verificar a posição relativa entre as retas e determinar a interseção quando
houver:
a) (r) : x − 2 =
y +1 z +1
x − 3 y − 1 z + 14
=
e (s) :
=
=
−2
3
2
−2
−2
Resp:a) Retas perpendiculares e (r)∩(s)=P(-1,5,-10)
b) (r) :
x −2 y +1 z −2
x −1
z+2
=
=
e (s) :
= y −1 =
3
4
3
−2
−3
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
Luiz Francisco da Cruz – Departamento de Matemática – Unesp/Bauru
Resp:a) Retas reversas e não existe (r)∩(s)
2) Determine a equação da reta suporte da altura relativa ao lado BC do triângulo
de vértices A(2,2,5), B(3,0,0) e C(0,6,0).
Resp:
(r) : X = (2,2,5) + t(0,0,5)
3) Os pontos médios dos lados de um triângulo são os pontos M(2,1,3), N(5,3,-1) e
P(3,-4,0). Determine a equação da reta suporte do lado deste triângulo que contém
o ponto M.
Resp: X=(2,1,3)+t(2,7,-1)
4) Escreva a equações simétricas da reta que passa pelo ponto A(5,-3,2) e é
paralela ao eixo Oz.
Resp:
x −5 = y +3 = 0 e z −2 = t
5)
Determine
(r) :
os
valores
x +1 y −3 z −2
=
=
k
−1
2
k = 4 ou k =
de
k
para
e (s) : x − 2 =
que
as
retas
sejam
coplanares:
y −k z −1
=
.
−2
3
Resp:
1
3
COMENTÁRIOS IMPORTANTES
1) É muito comum e até natural que se introduza o estudo da reta quando ela é
definida primeiramente no ℜ2. Muitas vezes, a reta é apresentada ao aluno como o
gráfico da função linear f(x) = y = ax + b , sempre representada no ℜ2 (no plano) e
não de uma forma geométrica ou vetorial. Os cuidados que se deve tomar, neste
capítulo, são: a) Nós estamos trabalhando sempre no ℜ3 (as definições são
diferentes quando trabalhamos com o ℜ2); b) A reta aqui definida (no ℜ3), tem uma
definição vetorial e uma interpretação geométrica (não apenas o gráfico da função
linear).
2) Quando estamos no ℜ2 a função linear f(x) = y = ax + b , como a própria
representação diz, temos y como função de x, ou seja: y = f(x) . Assim, a equação
de uma reta é, por exemplo: y = 2x + 5 . No ℜ3 a função linear é expressa na forma
y = ax + b e z = cx + d , tanto y com z são funções de x. Logo, a equação da reta é,
por exemplo: y = 2x + 5 e z = x − 3 . Note que esta forma de escrever a equação da
reta vem da forma simétrica, pois: y = 2x + 5 ⇒ x =
Logo x =
y −5
e z = x − 3 ⇒ x = z + 3.
2
y −5
= z + 3.
2
3) É muito importante o aluno saber destacar da equação simétrica da reta o seu
ponto e seu vetor diretor. Portanto, olhe o exemplo (1) e pratique um pouco.
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
Luiz Francisco da Cruz – Departamento de Matemática – Unesp/Bauru
4) Atenção às posições relativas entre retas. É muito comum o aluno afirmar que as
retas são ortogonais (pertencem a planos diferentes) e achar a interseção. Ora,
como isso é possível? Na verdade não é possível.
5) Outro erro muito comum é dizer que as retas são perpendiculares ou
concorrentes e não são coplanares. Ora, isso não é possível. Reveja estes conceitos
novamente e pense antes de afirmar alguma coisa.
6) Deve-se notar que uma reta é constituída de pontos. Como estamos
introduzindo os conceitos vetoriais para definirmos e trabalhamos com as retas, é
muito comum, quando utilizamos as equações da reta, confundir o que são pontos
da reta e o que são vetores paralelos ou contidos na reta. Por exemplo: Considere a
x −1 y +3 z
=
= . Como é comum representar um
2
−1
3
r
vetor expressando somente suas coordenadas por v = (x, y, z) , isso pode causar
reta de equação simétrica (r):
confusão com as coordenadas x, y e z dos pontos da reta, ou seja, as coordenadas
x, y e z que aparecem na equação simétrica (bem como nas outras equações)
x −1 y +3 z
=
= , são as coordenadas dos pontos da reta e não de um vetor
2
−1
3
paralelo ou contido nela. Um vetor só será paralelo ou estará contido na reta se for
múltiplo (ou seja, paralelo) ao vetor diretor da reta. No entanto, para que um ponto
pertença à reta é necessário que ele satisfaça a equação da reta. Note que o ponto
r
3 − 1 −4 + 3 3
=
=
⇒ 1 = 1 = 1 , mas o vetor v = (3,−4,3) não é
2
3
−1
r
paralelo à reta, pois o vetor diretor da reta é u = (2,−1,3) que não é múltiplo do
r
r
vetor v = (3,−4,3) . Já o vetor w = (4,−2,6) é paralelo à reta, pois é múltiplo do vetor
r
r
diretor, ou seja, w = 2 ⋅ u , mas o ponto de coordenadas Q(4,−2,6) ∉ (r) , pois:
P(3,−4,3) ∈ (r) , pois:
3
4 − 1 −2 + 3 6
=
=
⇒
≠ −1 ≠ 2 .
2
2
−1
3
Download