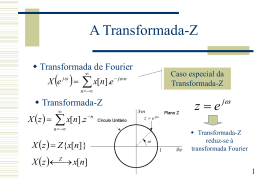
Transformada Z Processamento Digital de Sinais IFBA/GPSC 1 Transformada de Fourier 1 x[n] 2 X ( ) j n X ( ) e d j n x [ n ] e n IFBA/GPSC 2 Transformada Fourier Vantagem: Análise direta do espectro (componentes de freqüência) do sinal discreto; Desvantagens: A manipulação algébrica não é prática; Existem muitos sinais discretos cuja transformada de Fourier não existe. IFBA/GPSC 3 Transformada Z X ( z) n j x [ n ] z , no qual z re n X ( z) r 1 X () A transformada de Fourier é um caso específico da transformada Z. IFBA/GPSC 4 Transformada Z Critério de convergência da Transformada de Fourier : x[n] n Critério de convergência da Transformada Z: x[n]r n A convergência depende, também, dos valores de r, ou seja do |z|. n IFBA/GPSC 5 Região de Convergência Qual o intervalo de valores de r que garante a convergência da Transformada Z? Ex.: x[n] u[n] X ( z) u[n]z n n IFBA/GPSC 6 Região de Convergência u[n]z n n ROC Im n jwn r e n 0 Re n 1 n 0 r Circunferência Unitária ROC : r 1 IFBA/GPSC Representação Polar 7 Representação Útil Num( z ) ( z zer1 )(z zer2 )...(z zerM ) X ( z) Den( z ) ( z p1 )(z p2 )...(z pN ) zer= zeros de X(z), ou seja, as raízes do polinômio no numerador ( Num(z) ). p= pólos de X(z), ou seja, as raízes do polinômio no denominador ( Den(z) ). IFBA/GPSC 8 Região de Convergência (ROC): Propriedades A região de convergência é um disco ou um anel centrado na origem; A região de convergência não contém pólos; Se a região de convergência contém a circunferência unitária (r=1) existe a transformada de Fourier. IFBA/GPSC 9 Seqüência de Tempo Positivo O sinal é nulo para n < 0. Ex.: x[n] ... n A região de convergência (ROC) é composta pela área externa ao maior pólo de valor absoluto finito. IFBA/GPSC 10 Exemplo x[n] Im ... n x 1 x[ n] u[ n] z X ( z) z 1 Re Circunferência Unitária ROC : r 1 IFBA/GPSC 11 Seqüência de Tempo Negativo O sinal é nulo para n > 0. Ex.: x[n] ... n A região de convergência (ROC) é composta pela área interna ao menor pólo de valor absoluto finito. IFBA/GPSC 12 Exemplo: x[n] (2 n 3n )u[n] 5z 2 6 X ( z) (1 z / 2)(1 z / 3) Im Re x x 2 3 ROC : r 2 Pólos: z=2 e z=3 Zeros: z=12/5 IFBA/GPSC 13 Seqüência Bilateral x[n] não é de tempo positivo ou negativo. ... ... n ROC : p1 r p2 P1 maior pólo que contribui para n > 0 P2 menor pólo que contribui para n < 0 IFBA/GPSC 14 Exemplo: Im n n 1 1 x[n] u[n] u[n 1] 3 2 1 2z z 12 X ( z) 1 1 z z 3 2 x oo x -1/3 1/2 Re 1/12 ROC : 1/ 3 r 1/ 2 IFBA/GPSC 15 Seqüência de Duração Finita Têm duração limitada de n=N1 até n=N2. N1 N2 n A ROC contém todo plano z, exceto possivelmente em z=0 e/ou z= IFBA/GPSC 16 Exemplos Ex.: x[n]=[n], ROC contém todos os valores de z, incluindo z=0 e z=. x[n]=[n-1], ROC contém todos os valores de z, excluindo z=0. IFBA/GPSC 17 Estabilidade O sistema h[n] é estável se h[n] n Então: Um sistema é estável se a ROC contém a circunferência unitária. Um sistema Causal é Estável se todos os pólos estão dentro círculo unitário IFBA/GPSC 18
Baixar