As Cônicas e suas Aplicações Jocelino Sato∗ Faculdade de Matemática - FAMAT Universidade Federal de Uberlândia - UFU 38408-100, Uberlândia - MG 20 de outubro de 2004 Resumo Neste trabalho, focalizamos o estudo das seções cônicas seguindo dois caminhos diferentes: no primeiro, seguimos de perto o trabalho apresentado em 1.822 pelo matemático belga G. P. Dandelin, abordando o tratamento dado às seções cônicas por Apolônio (± 262 − 190 a.C.), deduzindo suas propriedades focais, onde trabalhamos com Geometria Euclidiana de forma sintética; no segundo, damos um enfoque analı́tico ao estudo das seções cônicas, o que só foi possı́vel com Pierre de Fermat (1601 − 1665). As propriedades de reflexão em curvas que são seções cônicas são estudadas e algumas de suas aplicações apresentadas. Além disso, exploramos a construção das cônicas utilizando alguns aparatos mecânicos e também um software de geometria dinâmica, Cabri Géomètre II. 1 Introdução Como todo conhecimento cientı́fico, as idéias Matemáticas passam por um processo evolutivo incorporando mudanças, sendo tratadas com novas ferramentas e métodos os quais, muitas vezes, lhes permitem um incremento no seu desenvolvimento. As seções cônicas são curvas obtidas pela interseção de um cone circular reto de duas folhas com um plano. Exposições gerais sobre as seções cônicas são conhecidas antes da época de Euclides (± 325−265 a.C.) e existe uma diversidade de definições para elas, cuja equivalência é mostrada na Geometria Elementar. Atualmente, as mais usuais referemse à propriedade foco – diretriz dessas curvas, porém, em seu célebre tratado sobre as seções cônicas, Apolônio de Perga (± 262 − 190 a.C.) não mencionou essa propriedade e não existia um conceito numérico que correspondia ao que chamamos de excentricidade. Coube a Pierre de Fermat a descoberta de que as seções cônicas podem ser expressas por equações do segundo grau nas coordenadas (x, y). Neste trabalho, mostramos que uma seção cônica é uma curva cuja equação cartesiana é do segundo grau, e inversamente, toda curva cuja equação é do segundo grau pode ser obtida a partir da interseção de um cone circular reto de duas folhas com um plano. Por essa razão, as curvas cujas equações são do segundo grau são chamadas de seções cônicas, ou simplesmente de cônicas. O objetivo deste trabalho é incentivar o aluno de geometria ∗ Universidade Federal de Uberlândia, Uberlândia, Brazil analı́tica para o estudo deste belo e rico tópico de Geometria, que são as seções cônicas e suas propriedades. Mostramos que as seções cônicas podem ser definidas e geradas de várias maneiras, sendo elas matematicamente equivalentes, com isso estaremos oferecendo uma rara oportunidade para mesclar geometria analı́tica com Geometria Espacial (Euclidiana), lugares geométricos, junto com uma coletânea de resultados por si só interessantes. Além disso, esperamos que a importância das seções cônicas para a Matemática pura e aplicada seja estabelecida ao apresentarmos as propriedades focais de suas tangentes e suas aplicações práticas. Uma breve introdução histórica sobre as cônicas é apresentada. Finalmente, observamos que o pré-requisito para este estudo consiste apenas de alguns conceitos básicos de Geometria Euclidiana e, sempre que possı́vel, iremos utilizar os recursos do software de geometria dinâmica Cabri Géomètre II como auxı́lio na ilustração de conceitos e na aprendizagem. 2 Aspectos históricos e a importância das cônicas Tratados sobre as seções cônicas são conhecidos antes da época de Euclides (± 325 − 265 a.C.) E, associado à história dessas curvas, temos Apolônio que nasceu na cidade de Perga, região da Panfı́lia (atualmente Turquia) por volta de 262 a.C. e viveu, aproximadamente, até 190 a.C. Apolônio foi contemporâneo e rival de Arquimedes que viveu, aproximadamente, entre 287 a.C. e 212 a.C. e, juntamente com Euclides, formam a trı́ade considerada como sendo a dos maiores matemáticos gregos da antigüidade. Apolônio estudou com os discı́pulos de Euclides em Alexandria e foi astrônomo notável, talvez ele, e não Euclides, mereceu dos antigos o adjetivo de ”o grande Geômetra ”. A maior parte das obras de Apolônio desapareceu. O que sabemos dessas obras perdidas devemos a Pappus de Alexandria (séc IV a.C.). Sua obra prima é Seções Cônicas composta por 8 volumes (aproximadamente 400 proposições!). Da obra original sobreviveram 7 volumes, sendo 4 escritos em grego e 3 traduzidos para o árabe por Thabit Ibn Qurra (826 a 901) no séc. IX. Os três primeiros volumes são baseados em trabalhos de Euclides e o oitavo volume foi, infelizmente, perdido. Em 1710, Edmund Halley traduziu os sete volumes sobreviventes de Secções Cônicas para o latim e todas as demais traduções para as lı́nguas modernas foram feitas a partir da tradução de Halley. Os precursores de Apolônio no estudo das cônicas foram Manaecmo, Aristeu e o próprio Euclides. Nesse perı́odo, elas eram obtidas seccionando um cone circular reto de uma folha com um plano perpendicular a uma geratriz do cone, obtendo três tipos distintos de curvas, conforme a seção meridiana do cone fosse um ângulo agudo, um ângulo reto ou um ângulo obtuso. Apolônio foi o matemático que mais estudou e desenvolveu as Elipse Parábola 2 Hpérbole seções cônicas na antiguidade. Suas contribuições foram: ter conseguido gerar todas as cônicas de um único cone de duas folhas, simplesmente variando a inclinação do plano de interseção; ter introduzido os nomes elipse e hipérbole e ter estudado as retas tangentes e normais a uma cônica. A importância do estudo de Apolônio sobre as cônicas dificilmente pode ser questionada. Temos a inegável influência dele sobre os estudos de Ptolomeu. Este foi astrônomo e geógrafo e fez observações em Alexandria de 127 − 151 d.C.. Suas obras mais famosas são o Almagesto (astronomia) e a Geografia (8 volumes). Ptolomeu introduziu o sistema de latitude e longitude tal como é usado hoje em cartografia e usou métodos de projeção e transformações estereográficas. Este estudo faz uso de um Teorema de Apolônio que diz que todo cone oblı́quo tem duas famı́lias de seções circulares. As Cônicas de Apolônio também tiveram forte influência nos estudos de Kepler. O interesse de Kepler pelas cônicas surgiu devido às suas aplicações à óptica e à construção de espelhos parabólicos. Em 1609, Kepler edita a Astronomia Nova, onde apresenta a principal lei da astronomia: ”os planetas descrevem órbitas em torno do Sol, com o Sol ocupando um dos focos”. A propósito, a palavra foco é devida a Kepler e provém da forma latinizada foccus cujo significado é fogo, lareira. Outra aplicação prática das cônicas aparece na obra de Galileu (1632), onde ”desprezando a resistência do ar, a trajetória de um projétil é uma parábola”. Galileu se reporta à componente horizontal e à componente vertical de uma parábola. Foi a Matemática pura de Apolônio que permitiu, cerca de 1.800 anos mais tarde, os ”Principia ”de Sir Isaac Newton. A lei da gravitação de Newton matematizou as descobertas empı́ricas de Kepler e, a partir do século dezessete, possibilitou o estudo analı́tico das cônicas e das suas aplicações aos movimentos no espaço, este, por sua vez, deu aos cientistas de hoje condições para que a viagem de ida e volta à Lua fosse possı́vel. Também não podemos deixar de falar em aplicações práticas usuais recentes como nos receptores parabólicos, telescópios, navegação LORAN, etc. Coube a Pierre de Fermat (1601 − 1665) a descoberta das equações cartesianas da reta e da circunferência, e as equações mais simples da elipse, da parábola e da hipérbole. Ele aplicou uma transformação equivalente à atual rotação de eixos para reduzir uma equação do 2◦ grau à sua forma mais simples. 3 O Trabalho de G. P. Dandelin Seguindo Apolônio, vamos considerar as seções (interseções) de um cone circular reto de duas folhas K por um plano π que não passa pelo vértice V do cone. Mais precisamente, tomamos duas retas g e l que se intersectam num ponto V de R3 e rotacionamos g ao redor de V . A reta g descreve um cone circular reto de duas folhas (a menos que as retas 3 sejam perpendiculares e neste caso a reta g descreve um plano). Toda reta que é obtida rotacionando g ao redor de V é chamada geratriz do cone. A reta l é o eixo do cone, o ponto V interseção de g e l é o vértice do cone. Denominaremos o ângulo α entre g e l de semi-ângulo do vértice do cone (0 < α < 90). Uma seção cônica (ou simplesmente cônica) é dada pela interseção do cone K com o plano π. Nesta seção usaremos as seguintes notações (ver figura): • K = um cone circular reto de geratriz g e eixo l com vértice V , • π = um plano, • C = π ∩ K, uma seção cônica, • α = o semi-ângulo do vértice de K, • β = o ângulo entre π e o eixo de K. a b V De forma geral, uma cônica depende de duas coisas: dos tamanhos relativos dos ângulos α e β, e se V é um ponto do plano π ou não. Ela será suave ou não degenerada se V não pertence a π e, degenerada quando V pertence ao plano π. Além disso, recebe a denominação de: • elı́ptica se α < β, • parabólica se α = β; • hiperbólica se α > β. Uma cônica elı́ptica degenerada é um ponto, uma cônica parabólica degenerada é uma única reta, e uma cônica hiperbólica degenerada consiste de duas retas que se intersectam em V . 4 Aqui consideraremos apenas as cônicas suaves: a elipse (cônica elı́ptica suave), a parábola (cônica parabólica suave), e a hipérbole (cônica hiperbólica suave). Uma seção C será uma elipse, hipérbole ou parábola conforme o plano π corte uma folha, duas folha ou seja paralelo a uma geratriz do cone. Vamos provar que essas seções possuem propriedades que permitem dar uma outra definição para as cônicas. A prova é baseada no trabalho do matemático belga G. P. Dandelin. Suas construções usam a existência de superfı́cies esféricas S1 e S2 que se inscrevem no cone K, ao longo de cı́rculos λ1 e λ2 , e são tangentes ao plano π nos pontos F1 e F2 . Se a cônica é uma elipse ou uma hipérbole, então duas superfı́cies esféricas inscritas são tangentes à π, mas se a cônica é uma parábola, uma única superfı́cie esférica tem esta propriedade. Lema 3.1 A bissetriz de um ângulo ∠CAB é o conjunto formado pelo ponto A, juntamente com os pontos do interior do ângulo que são eqüidistantes dos lados do ângulo. Demonstração: (Deixada para o leitor) ← → ←→ Lema 3.2 Se P T e P U são tangentes à uma superfı́cie esférica S = S(O, r), de centro O e raio r, nos pontos T e U, respectivamente, então os triângulos △P OT e △P OU são congruentes e, portanto, P T = P U. S T P O U Demonstração: (Deixada para o leitor) Lema 3.3 Seja K um cone circular reto de geratriz g e eixo l com vértice V e semiângulo do vértice igual a α. Seja π um plano que intersecta K num ponto diferente de V , fazendo um ângulo β com l. Temos: a) se α < β, então existem duas superfı́cies esféricas inscritas no cone e tangentes ao plano π, sendo ambas contidas numa mesma folha do cone; 5 b) se α = β, então existe uma única superfı́cie esférica inscrita no cone e tangente ao plano π; c) se α > β, então existem duas superfı́cies esféricas inscritas no cone e tangentes ao plano π, estando elas contidas uma em cada folha do cone. Demonstração: As interseções de um cone com um plano que contém seu eixo, chamadas de seções meridianas do cone, determinam ângulos, sendo suas bissetrizes raios contidos no eixo do cone. Uma seção cônica determinada por um plano π é sempre perpendicular a uma dessas seções meridianas, além disso, segue do Lema 3.1 que existem cı́rculos, contidos no plano da seção meridiana, que são tangentes ao plano π e aos lados dos ângulos determinados pela seção meridiana. V V F a a E B D A b b>a T C a=b B b<a A V D U T A C a E b a a D C E B Rotacionando esses cı́rculos em torno do eixo do cone obtemos superfı́cies esféricas inscritas no cone e tangentes ao plano π, sendo elas contidas em folhas do cone de acordo com a medida do ângulo β que π faz com o eixo do cone (Lembre-se do Teorema dos ângulos alternos e internos). 3.1 Excentricidade, diretriz e foco de uma cônica A menos do cı́rculo (caso particular de uma elipse) uma cônica suave C tem pelo menos uma diretriz e um foco. Para construir uma diretriz, consideramos uma superfı́cie esférica S inscrita no cone K e tangente ao plano π que determina a cônica (ver Lema 3.3). S intersecta K ao longo de um cı́rculo λ. Todo cı́rculo está contido num plano, assim, seja τ o plano que contém S ∩ K. A reta d =τ ∩π é uma diretriz da cônica C, e o ponto F = S ∩ π é seu foco associado. Quando C é um cı́rculo temos que τ é paralelo a π e, assim, a diretriz não existe. A excentricidade e de uma cônica C é dada pelo quociente e= cos (β) . cos (α) Assim, temos a seguinte classificação com relação à excentricidade: • e > 1 se C é uma hipérbole, • e = 1 se C é uma parábola, 6 • 0 < e < 1 se C é uma elipse não circular, • e = 0 se C é um cı́rculo. Denotaremos por dis(., .) a distância entre dois pontos ou, entre um ponto e uma reta ou ainda, entre duas retas. Proposição 3.4 Se C é uma cônica suave distinta de um cı́rculo com excentricidade e, diretriz d, e foco associado F , então dist(P, F ) = e.dist(P, d) para todo ponto P ∈ C. Demonstração: V p P F b d a l Q T R t S (Faremos uma demonstração devido da Dandelin.) Seja τ o plano contendo S ∩ K, e seja P um ponto arbitrário em C. Escolha os pontos Q, R, e T de forma que i) Q ∈ τ e P Q é perpendicular ao plano τ , ii) T ∈ d e T P é perpendicular à reta d, −→ ii) R é o ponto de λ = S ∩ K dado por V P ∩ S. O segmento P Q é paralelo ao eixo do cone, conseqüentemente, o segmento P Q e o eixo do cone são perpendiculares ao plano τ . A reta d está contida em τ e P Q é perpendicular a τ , assim, concluı́mos que P Q é perpendicular a d. Considerando que T P também é perpendicular a d, segue-se que o plano que contém os pontos P , Q e T é perpendicular à reta d. Sendo d uma reta contida em π, temos que esse plano é perpendicular ao plano π. Logo, ∠P QT = β porque P Q é paralelo ao eixo do cone, e ∠P QR = α pela mesma razão. Assim, P Q = P R cos α = P T cos β. ←→ ←→ Mas, pelo Lema 3.2, P R = P F = dist(P, F ) porque as retas P R e P F são tangentes à superfı́cie esférica S em R e F . Agora, P T = dist(P, d) porque P T é perpendicular à reta d. Conseqüentemente, dist(P, F ) cos α = dist(P, d) cos β. Dividindo ambos os membros dessa igualdade por cos α completamos a prova. Corolário 3.5 Se uma cônica C é uma parábola com foco F e diretriz d, então dist(P, F ) = dist(P, d) para todo ponto P ∈ C. Demonstração: Basta observar que se C é uma parábola então e = 1. 7 Observação 3.1 O Lema 3.3 junto com a Proposição 3.4 e seu Corolário 3.5 permitem concluir que a elipse e a hipérbole são cônicas com duas diretrizes e dois focos, enquanto que a parábola é uma cônica de uma única diretriz e um único foco associado. Proposição 3.6 Se C é uma elipse de focos F1 e F2 , então P F1 + P F2 é o mesmo para todo ponto P ∈ C. Ou seja, P F1 + P F2 = constante. P F2 F1 Demonstração: Seja P um ponto arbitrário da elipse C de focos F1 e F2 dados pela interseção do plano π com as superfı́cies esféricas S1 e S2 . V F2 l2 Q2 S2 F1 P l1 Q1 S1 O segmento P F1 é tangente à esfera S1 em F1 e P F2 é tangente à esfera S2 em F2 , desde que as superfı́cies esféricas S1 e S2 sejam tangentes à π nestes pontos (ver Lema 3.3). Sejam −→ Q1 = V P ∩ S1 −→ Q2 = P V ∩ S2 ←−→ Como S1 e S2 são tangentes ao cone K, ao longo de cı́rculos λ1 e λ2 , temos que P Q1 ←−→ é tangente à S1 em Q1 e P Q2 é tangente à S2 em Q2 . Conseqüentemente, segue-se do Lema 3.2 que P F1 = P Q1 e P F2 = P Q2 . Então, P F1 + P F2 = P Q1 + P Q2 , em que P Q1 + P Q2 = Q1 Q2 é a distância entre os cı́rculos λ1 e λ2 . Como a distância entre eles não depende de P segue-se que a soma P F1 + P F2 é a mesma para todo ponto P ∈ C. Isto completa a prova. A demonstração da próxima proposição é uma simples adaptação da demonstração da proposição anterior. 8 Proposição 3.7 Se C é uma hipérbole de focos F1 e F2 , então |P F1 − P F2 | é o mesmo para todo P ∈ C. Ou seja, |P F1 − P F2 | = constante. P F1 F2 Demonstração: Seja P um ponto arbitrário da hipérbole C de focos F1 e F2 dados pela interseção do plano π com as superfı́cies esféricas S1 e S2 . O segmento P F1 é tangente à esfera S1 em F1 e P F2 é tangente à esfera S2 em F2 , desde que as superfı́cies esféricas S1 e S2 sejam tangentes à π nestes pontos (ver Lema 3.3). P F2 S2 l2 Q2 V Q1 l1 S1 F1 Sejam −→ Q1 = V P ∩ S1 −→ Q2 = P V ∩ S2 . ←−→ Como S1 e S2 são tangentes ao cone K, ao longo de cı́rculos λ1 e λ2 , temos que P Q1 ←−→ é tangente à S1 em Q1 e P Q2 é tangente à S2 em Q2 . Conseqüentemente, segue-se do Lema 3.2 que P F1 = P Q1 e P F2 = P Q2 . Então, P F1 − P F2 = P Q1 − P Q2 , em que |P Q1 − P Q2 | = Q1 Q2 = Q1 V + V Q2 não depende dos pontos Q1 e Q2 pertencentes aos cı́rculos λ1 e λ2 . Como a ultima soma não depende do ponto P segue-se que o módulo da diferença |P F1 − P F2 | é constante. Isto completa a prova. 4 Estudo Analı́tico das Cônicas Uma curva pode ser definida como sendo o conjunto de pontos que gozam de uma mesma propriedade, ou seja, como um lugar geométrico, ou como gerada por um ponto 9 móvel que se desloca no plano ou no espaço, ou ainda como a interseção de duas superfı́cies. As cônicas de Apolônio (interseções de superfı́cies) foram caracterizadas por suas propriedade focais (lugares geométricos) com estabelecido na seção anterior. Nessa seção, vamos representar mediante o emprego de coordenadas, pontos de um objeto geométrico por números e suas imagens por equações. Ou seja, vamos aplicar o método da Geometria Analı́tica para descrever e resolver problemas geométricos. O mérito desse método é creditado ao pai da filosofia moderna René Descartes (1.596 − 1.650). Sua obra “Discours de la Méthode”, publicada em 1.637 em Leyden, na Holanda, continha um apêndice denominado La Géometrie, que apresentava as idéias fundamentais sobre a resolução dos problemas geométricos usando coordenadas (sistema cartesiano) e equações algébricas. Entretanto Descartes não tratou de quase nada do que se entende hoje por geometria analı́tica, não tendo deduzido sequer a equação de uma reta. Esse mérito do marco zero da geometria analı́tica deve ser creditado a Pierre de Fermat que conclui em 1.629 o manuscrito “Ad locos planos e et sólidos isagoge” (Introdução aos lugares planos e sólidos). Usando as Proposições 3.4, 3.5, 3.6 e 3.7 acima podemos definir as cônicas como um lugar geométrico em termos da chamada propriedade focal. Precisamente temos: Definição 4.1 Denomina-se cônica o lugar geométrico dos pontos de um plano cuja razão entre as distâncias a um ponto fixo F e a uma reta fixa d é igual a uma constante não negativa e. O ponto fixo é chamado de foco, a reta fixa de diretriz e a razão constante de excentricidade da cônica. Quando e = 1 a cônica é chamada de parábola, quando 0 < e < 1 de elipse e quando e > 1 de hipérbole. Adotando um sistema cartesiano de coordenadas retangulares podemos supor: i) foco: ponto F (x0 , y0); ii) diretriz: reta d : ax + by + c = 0; iii) excentricidade: constante e ≥ 0 y d F x V De acordo com a definição, um ponto P (x, y) pertence à cônica quando p (x − x0 )2 + (y − y0 )2 dist(P, F ) = = e. |ax+by+c| dist(P, d) √ 2 2 (1) a +b Elevando membro a membro ao quadrado, fazendo k 2 = podemos escrever: 10 e2 , a2 +b2 l = ka, m = kb e n = kc, (x − x0 )2 + (y − y0 )2 = k 2 [|ax + by + C|]2 = (kax + kby + kc)2 , o que fornece a equação denominada equação focal das cônicas: (x − x0 )2 + (y − y0 )2 − (lx + my + n)2 = 0, em que x0 e y0 são as coordenadas do foco e lx + my + n = 0 é a equação da diretriz correspondente. Desenvolvendo os produtos notáveis e ordenando as potências de acordo com as potências das variáveis x e y temos uma igualdade da forma: Ax2 + Bxy + Cy 2 + Dx + Ey + F = 0, (2) em que as constantes A, B, C, D, E e F satisfazem A = 1 − l2 D = −2(x0 + ln) B = −lm E = −2(y0 + mn) C = 1 − m2 F = x20 + y02 − n2 que é a forma geral da equação cartesiana geral das cônicas. Os vários valores que as constantes A, B, C, D, E e F podem assumir fornecem: pontos, retas , cı́rculos, parábolas, elipses e hipérboles. Por exemplo, se em um certo sistema de coordenadas cartesianas ortogonais tem-se F (3, 3) e d : x + y − 1 = 0, então temos uma parábola com: 2 dist(P, F ) (x − 3)2 + (y − 3)2 = = 12 , h i2 dist(P, d)) |x+y−1| √ 12 +12 1 1 2 x + 2xy + y 2 − 2x − 2y + 1 (x2 − 6x + 9) + (y 2 − 6y + 9) = [x + y − 1]2 = 2 2 Ou seja, a parábola tem equação: x2 + y 2 − 2xy − 10x − 10y + 35 = 0. A forma da equação de uma cônica depende da escolha do sistema de eixos coordenados. Além disso, existe uma relação entre elas! Consideremos o sistema de coordenadas cartesianas ortogonais para o plano, em que o eixo x̃ é a reta perpendicular à diretriz d passando pelo foco F e o eixo ỹ coincide com a diretriz. Seja Õ a origem desse sistema de coordenadas. ~ X ~~ P(x,y) ~y F ~ O d 11 Fazendo ÕF = 2p e usando a definição (1) temos que um ponto P com coordenadas (x̃, ỹ), em relação a esse sistema de coordenadas, pertence à cônica de diretriz d , foco F e excentricidade e se, e somente se, q 2 2 2 2 (x̃ − 2p) + (ỹ − 0) dist (P, F ) = e2 . = dist (P, d) |x̃| Desenvolvendo e simplificando essa igualdade obtemos a equação cartesiana das cônicas em função dos parâmetros p e e: (1 − e2 )x̃2 − 4px̃ + ỹ 2 = −4p2 . 4.1 (3) Parábola No caso da parábola temos e = 1 e a equação (3) reduz-se a: ỹ 2 = 4p (x̃ − p) . Seja O o ponto de coordenadas (p, 0), realizando uma translação de eixos coordenados de modo que O passe a ser a origem, obtemos um novo sistema de coordenadas cartesianas xy, em que valem as seguintes relações entre as coordenadas dos dois sistemas: x̃ = x + p ỹ = y. No sistema de coordenadas (x, y) a equação cartesiana da parábola toma a forma y 2 = 4px, (4) chamada equação reduzida da parábola (com eixo de simetria igual ao eixo x). Numa parábola arbitrária temos os seguintes elementos: • foco: o ponto F ; • diretriz : a reta d; • corda principal : segmento paralelo à diretriz, passando por F e com extremidades nos pontos R e S da parábola; • eixo de simetria: a reta r perpendicular à diretriz passando pelo ponto F ; • vértice: o ponto V de interseção do eixo de simetria com a parábola. y S V d x F R P 12 Obtemos a equação reduzida da parábola de forma mais direta mediante a escolha do seguinte sistema de coordenadas para o plano (metodologia usual): • eixo x: reta perpendicular à diretriz d passando por F ; • eixo y: mediatriz do segmento F D, em que D é a interseção do eixo x com a reta d. Fazendo F D = 2p temos d : x + p = 0, F (p, 0) e um ponto P (x, y) está na parábola se, e somente se, p |x + p| (x − p)2 + (y − 0)2 = dist(P, F ) = dist(P, d) = √ 1+0 o que fornece a equação y 2 = 4px, 4.2 x ≥ 0, p > 0. Elipse I A elipse possui excentricidade e, com 0 < e < 1, logo, (1 − e2 ) > 0. Dividindo a equação das cônicas (3) por (1 − e2 ) obtemos: 4p ỹ 2 4p2 x̃ − x̃ + =− . (1 − e2 ) (1 − e2 ) (1 − e2 ) 2 E, completando os quadrados obtemos, após simplificação, 2 2p ỹ 2 4p2 1 4p2 e2 x̃ − + = − 1 = . 1 − e2 (1 − e2 ) (1 − e2 ) (1 − e2 ) (1 − e2 )2 2pe 2 4p2 e2 Dividindo membro a membro por (1−e temos a equação cartesiana: 2 )2 = 1−e2 2p x̃ − 1−e 2 2pe 2 1−e2 2 +h ỹ 2 √2pe 1−e2 i2 = 1. 2p Seja O o ponto de coordenadas ( 1−e 2 , 0). Realizando uma translação de eixos coordenados de modo que O passe a ser a origem, obtemos um sistema de coordenadas xy, em que x̃ = x + ỹ = y. 2p , 1 − e2 2pe √2pe podemos reescrever a equação da elipse com focos sobre o Fazendo a = 1−e 2 e b = 1−e2 eixo x na forma reduzida x2 y 2 + 2 = 1. (5) a2 b √ 2pe √2pe = b. Sendo 0 < 1 − e < 1 temos 1 − e < 1 − e e, portanto, a = 1−e 2 > 1−e2 Observação 4.1 O número a é sempre denominador na fração onde aparece a variável do eixo contendo o foco. Assim, se o eixo y for perpendicular à diretriz passando por F a equação da elipse é da forma x2 y + 2 = 1. 2 b a 13 Fazendo F = F1 e D1 = Õ, se F2 e D2 são pontos do eixo x tais que OF = OF2, D1 O = D2 O e d2 é a reta perpendicular ao eixo x passando por D2 , então o ponto F2 e a reta d2 constituem um outro foco e uma outra diretriz para a elipse. De fato, um ponto P1 (x, y) pertence à elipse se, e somente se, o ponto P2 (−x, y) simétrico de P1 em relação ao eixo y, também pertence. Logo, para F = F1 e d = d1 temos: e= dist (P1 , F1 ) dist (P2 , F2 ) = , dist (P1 , d1 ) dist (P2 , d2 ) o que prova a afirmação. Da construção do sistema de eixos coordenados temos as seguintes igualdades: 2p = D2 O, 1 − e2 2pe2 2p F1 O = − 2p = = F2 O. 1 − e2 1 − e2 D1 O = Usando os valores de a e b e fazendo dist(F1 , F2 ) = 2c obtemos: 2pe 1 a = , 2 1−e e e 2pe2 2pe F1 O = c = = e = a.e 1 − e2 1 − e2 4p2 e2 1 4p2 e4 2 a2 − b2 = − 1 = 2 = c . 2 1 − e2 1 − e2 (1 − e ) D1 O = Resumindo temos: 1. A elipse é uma cônica de dois focos e duas diretrizes; 2. Se o sistema de eixos coordenados é tal que: os focos estão sobre o eixo x e a equação cartesiana da elipse de diretriz d = d1 , foco F = F1 e excentricidade e é x2 y 2 + 2 = 1, a > b, a2 b então as coordenadas do foco são F1 (−c, 0) e F2 (c, 0), com c = a.e = c Logo, a excentricidade satisfaz e = ; a 3. As equações das diretrizes são d1 : x + a e = 0 e d2 : x − a e √ a2 − b2 . = 0. 4. A elipse representativa de (5) é uma curva simétrica em relação aos eixos, fechada e contida no retângulo cujos lados estão contidos nas retas x = ±a e y = ±b. Numa elipse arbitrária temos os seguintes elementos: • foco: os pontos F1 e F2 ; • distância focal : distância entre os focos F1 F2 = 2c; • centro O: ponto médio do segmento focal F1 F2 ; ←−→ • vértices A1 e A2 : interseção da elipse com a reta focal F1 F2 ; 14 • vértices B1 e B2 : interseção da elipse com a mediatriz do segmento F1 F2 ; • eixo maior : segmento A1 A2 de medida 2a; • eixo menor : segmento B1 B2 de medida 2b; • parâmetros geométricos: os números a, b e c (a2 = b2 + c2 ); • corda principal : segmento passando por um dos focos e paralelo ao segmento B1 B2 , com extremidades em pontos R e S da elipse; c a • excentricidade: número e = com 0 < e = c < 1; a ←−→ • diretrizes: retas d1 e d2 perpendiculares à reta focal F1 F2 e a uma distância centro O; a e do ←−→ ←−→ • eixos de simetrias: reta focal F1 F2 e a mediatriz do segmento F1 F2 (reta B1 B2 ). A excentricidade de uma elipse satisfaz 0 < e = ac < 1, e no limite, isto é, quando c = 0 temos F1 = 0 = F2 e a excentricidade e = ac se anula. Neste caso, a elipse se degenera numa circunferência (a = b). B2 S A1 F1 O F2 A2 d1 R B1 4.2.1 Elipse II Usualmente, a elipse é caracterizada como sendo o lugar geométrico dos pontos P de um plano cuja soma das distâncias a dois pontos fixos F1 e F2 (focos), do mesmo plano, é constante e igual a 2a (ver Proposição 3.6): dist(P, F1 ) + dist(P, F2 ) = 2a. Para que esse lugar geométrico seja não vazio e, nem se reduza a um ponto, devemos ter 2a > 2c = dist(F1 , F2 ). Ela é uma cônica de dois focos e duas diretrizes e, considerando o seguinte sistema de coordenadas para o plano: • eixo x: reta passando pelos focos F1 e F2 ; • eixo y: mediatriz do segmento F1 F2 ; temos F1 (−c, 0), F2 (c, 0). Assim, um ponto P (x, y) está na elipse se, e somente se, p p (x + c)2 + y 2 ) + (x2 − c) + y 2 = 2a. 15 Assim, podemos escrever: p (x + c)2 + y 2 = (x − c)2 + y 2 − 4a (x − c)2 + y 2 + 4a2 p a (x − c)2 + y 2 = a2 − cx a2 x2 − 2a2 cx + a2 c2 + a2 y 2 = a4 − 2a2 xc + c2 x2 a2 − c2 x2 + a2 y 2 = a2 (a2 − c2 ). Como a > c, fazendo a2 − c2 = b2 na igualdade acima e dividindo membro a membro por a2 b2 , tem-se a equação reduzida da elipse com focos sobre o eixo x x2 y 2 + 2 = 1. a2 b 4.2.2 Raios focais e diretriz As distâncias ρ1 = dist(P, F1 ) e ρ2 = dist(P, F2 ) de cada foco da elipse a um ponto arbitrário P (x, y) da elipse são tais que: p (x + c)2 + y 2 = ρ1 , p (x − c)2 + y 2 = ρ2 , p p (x + c)2 + y 2 + (x − c)2 + y 2 = ρ1 + ρ2 = 2a. Racionalizando e simplificando obtemos a equação aρ2 = a2 − cx que fornece as expressões lineares em x para os raios focais: c ρ2 = a − x = a − ex, a ρ1 = 2a − ρ1 = a + ex. Observação 4.2 Considerando o foco F1 (−c, 0) e a reta d1 : x + dist(P, F1 ) = dist(P, d1 ) a e a e = 0, temos: ρ1 a + ex = a+ex = e. +x e Analogamente, considerando F2 (c, 0) e a reta d2 : x − dist(P, F2 ) = dist(P, d2 ) a e a e = 0 temos: ρ2 a − ex = a−ex = e. −x e Assim, de acordo com a definição geral, as retas d1 e d2 são diretrizes da elipse situadas à distância ae do centro da cônica. 4.3 Hipérbole Podemos chegar à equação canônica de uma hipérbole fazendo um desenvolvendo análogo ao feito para a elipse na subseção 4.2. 16 No entanto, usaremos a caracterização usual da hipérbole como sendo o lugar geométrico dos pontos P de um plano cujo módulo da diferença das distâncias a dois pontos fixos, do mesmo plano, é constante e igual a 2c (ver Proposição 3.7) |dist(P, F1 ) − dist(P, F2 )| = 2a < 2c = dist(F1 , F2 ), para obter sua equação. Assim como a elipse a hipérbole é uma cônica de dois focos e duas diretrizes. Fazendo b2 = c2 − a2 , ou seja, c2 = a2 + b2 e procedendo como no caso da elipse (ver subseção 4.2.1), obtemos a equação reduzida da hipérbole com focos sobre o eixo x x2 y 2 − 2 = 1. (6) a2 b A hipérbole representativa dessa equação tem interseções com o eixo x nos pontos A1 (−a, 0) e A2 (a, 0) e sua interseção com o eixo y é vazia. Ela é uma curva simétrica em relação a ambos os eixos e resolvendo a equação em relação x obtemos y2 x2 = 1 + > 1. a2 b2 Portanto, a hipérbole não entra na região vertical entre as retas x = −a e x = a. As retas r1 : y − ab x = 0 e r2 : y + ab x = 0 são assı́ntotas da hipérbole. Observação 4.3 Quando os focos de uma hipérbole estão sobre o eixo y, a sua equação reduzida é da forma x2 y 2 − 2 + 2 = 1. b a E, neste caso, as assı́ntotas são as retas r1 : y − ab x = 0 e r2 : y + ab x = 0. Em uma hipérbole arbitrária temos os seguintes elementos: • foco: os pontos F1 e F2 ; • distância focal : distância entre os focos F1 F2 = 2c; • centro O: ponto médio do segmento focal F1 F2 ; ←−→ • vértices A1 e A2 : interseção da hipérbole com a reta focal F1 F2 ; • parâmetros geométricos: os números a, b e c com c2 = a2 + b2 ; • eixo focal : segmento A1 A2 de medida 2a; • eixo conjugado: segmento B1 B2 contido na mediatriz do segmento transverso, de medida 2b e cujo ponto médio é o centro O; • vértices B1 e B2 : extremidades do eixo conjugado; • retângulo fundamental : retângulo determinado pelas retas paralelas ao eixos (transverso e conjugado) e passando pelos vértices A1 , A2 , B1 e B2 ; • corda principal : segmento passando por um dos focos e paralelo ao eixo conjugado, com extremidades em pontos R e S da hipérbole; 17 • excentricidade: número e = c a c > 1; a com e = ←−→ • diretrizes: retas d1 e d2 perpendiculares à reta focal F1 F2 e a uma distância centro O; a e do ←−→ ←−→ • eixos de simetrias: reta focal F1 F2 e a mediatriz do segmento F1 F2 (reta B1 B2 ). • assı́ntotas: retas suportes das diagonais do retângulo fundamental. Usando as igualdade ρ1 = dist(P, F1 ) = ex+a e ρ2 = dist(P, F2 ) = ex−a para os raios focais de uma hipérbole, concluı́mos que ela é uma cônica com duas diretrizes paralelas ao eixo conjugado e simétricas em relação ao centro. Por exemplo, considerando o foco F1 (−c, 0) temos a reta d1 : x + ae = 0 como diretriz associada. y S d1 B2 F1 A1 o A2 F2 x B1 R 4.4 Redução de uma cônica à sua forma canônica Dado uma equação cartesiana geral de uma cônica Ax2 + Bxy + Cy 2 + Dx + Ey + F = 0 (7) uma pergunta natural seria: Ela representa qual curva? Responder a essa pergunta é tratar de um segundo problema fundamental da geometria; o de reconhecer um objeto geométrico a partir de sua equação cartesiana. É claro que no caso de uma cônica a resposta depende das constantes A, B, C, D, E e F que aparecem na equação. Tudo é resolvido escolhendo um sistema de eixos coordenados especial, mediante translação e rotação de eixos, e encontrando a equação da cônica em relação a esse sistema. Essas equações estarão na forma reduzida, conforme visto na seção anterior. 4.4.1 Fórmula de redução e classificação de uma cônica Observamos que se a equação geral de uma cônica decompõe-se no produto de dois fatores lineares, então a equação representa uma cônica degenerada, ou seja, um ponto ou uma reta ou ainda um par de retas concorrentes. Da igualdade 4A Ax2 + Bxy + Cy 2 + Dx + Ey + F = 0 podemos escrever [2Ax + By + D]2 = (B 2 − 4AC)y 2 + 2(BD − 2AE)y + D 2 − 4AF. 18 Logo, concluı́mos que a cônica é degenerada se (B 2 − 4AC)y 2 + 2(BD − 2AE)y + D 2 − 4AF (8) possui raı́zes reais duplas (discriminante nulo). Para isso devemos ter: 4(BD − 2AE)2 − 4(B 2 − 4AC) D 2 − 4AF = −16A 4ACF + BDE − AE 2 − CD2 − F B 2 = 0. Se este for o caso, então podemos escrever [2Ax + By + D]2 = B 2 − 4AC (y − y0 )2 , sendo y0 a raiz dupla do trinômio (8) e, resolvendo a equação em relação a uma das variáveis obtemos as equações das ”retas”. Por exemplo, se A 6= 0 podemos escrever p −(By + D) ± (B 2 − 4AC)y 2 + 2(BD − 2AE)y + D 2 − 4AF x= . 2A A expressão ∆ = 4ACF + BDE − AE 2 − CD2 − F B 2 é chamada discriminante da equação de uma cônica. Admitindo-se C 6= 0 e procedendo como acima resulta na mesma expressão para o discriminante. Quando ∆ 6= 0 a equação representa uma cônica não degenerada; adotando um sistema de eixos coordenados adequado podemos reduzir sua equação cartesiana à forma reduzida e, conseqüentemente, classificá-la. Para isso, fazemos primeiro uma mudança de coordenadas dada por uma rotação de eixos com o objetivo de eliminar o termo cruzado xy na equação cartesiana geral (7). ~ y y P(x,y) B ~ x q E C D q O A F x As fórmulas de rotação que estabelecem as relações entre as coordenadas (x, y) de um ponto P , em relação ao sistema xy, com suas coordenadas (x̃, ỹ) em relação ao sistema x̃ỹ são: x = x̃ cos(θ) − ỹsen(θ); y = x̃sen(θ) + ỹ cos(θ); (9a) (9b) x̃ = x cos(θ) + ysen(θ); ỹ = −xsen(θ) + y cos(θ). (9c) (9d) 19 Aplicando as fórmulas (9a-9d) à equação geral de uma cônica obtemos sua equação em relação ao sistema de eixos x̃ỹ : Ãx̃2 + B̃ x̃ỹ + C̃ ỹ 2 + D̃x̃ + Ẽ ỹ + F̃ = 0, com à = A cos2 (θ) + B cos(θ)sen(θ) + Csen 2 (θ); B̃ = B cos(2θ) − (A − C)sen(2 θ); C̃ = Asen 2 (θ) − B cos(θ)sen(θ) + C cos2 (θ); D̃ = D cos(θ) + Esen(θ); Ẽ = −Dsen(θ) + E cos(θ); F̃ = F. Essas igualdades fornecem as seguintes relações entre os coeficientes das duas equações: à + C̃ = A + C; à − C̃ = Bsen (2 θ) + (A − C ) cos (2 θ) ; 2 B̃ + (à − C̃)2 = B 2 + (A − C)2 ; 2 B̃ − 4ÃC̃ = B 2 − 4AC. 2 Isso mostra que as expressões à + C̃ = A + C e B̃ − 4ÃC̃ = B 2 − 4AC, bem como o termo independente F̃ = F , são invariantes por rotação de eixos. A expressão I = B 2 − 4AC é chamado indicador da equação da cônica. A fim de simplificar a equação de uma cônica, eliminando o termo x̃ỹ, devemos realizar uma rotação de um ângulo θ de modo que B̃ = 0. Isso corresponde a uma cônica com eixo focal paralelo ao eixo x̃. Neste caso, devemos ter B̃ = B cos(2θ) − (A − C)sen(2 θ) = 0 ⇔ tag(2 θ) = B . A−C Usando a igualdade 2tag(θ) B = tag(2 θ) = = γ, 2 1 − tag (θ) A−C concluı́mos que a equação tag(2 θ) = B A−C possui duas soluções distintas, raı́zes da equação γtag 2 (θ) + 2tag(θ) − γ = 0 . Ou seja, tag(θ) = −1 ± 20 p 1 + γ2 . γ Nas aplicações sempre usamos a solução θ com 0 < θ < por esse ângulo, a equação da cônica toma a forma π 2 e, após a rotação de eixos dada Ãx̃2 + C̃ ỹ 2 + D̃x̃ + Ẽ ỹ + F̃ = 0 (10) Agora, consideremos uma mudança de coordenadas dadas por uma translação de eixos. As fórmulas de translação que estabelecem as relações entre as coordenadas (x̃, ỹ) de um ponto P , em relação ao sistema x̃ỹ, com suas coordenadas (x̄, ȳ) em relação ao sistema x̄ȳ são simplesmente, x̃ = x̄ + x0 , ỹ = ȳ + y0 , em que (x0 , y0 ) são as coordenadas, no sistema x̃ỹ, do ponto Ō origem do sistema x̄ȳ. Aplicando essas relações à equação Ãx̃2 + B̃ x̃ỹ + C̃ ỹ 2 + D̃x̃ + Ẽ ỹ + F̃ = 0, (11) de uma cônica obtemos sua equação cartesiana em relação ao sistema x̄ȳ Ãx̄2 + B̃ x̄ȳ + C̃ ȳ 2 + D̄x̄ + Ē ȳ + F̄ = 0, (12) com D̄ = 2Ãx0 + B̃y0 + D̃; Ē = B̃x0 + 2C̃y0 + Ẽ; F̄ = Ãx20 + B̃x0 y0 + C̃y02 + D̃x0 + Ẽy0 + F̃ . Logo, concluı́mos que os coeficientes Ã, B̃ e C̃ dos termos de segundo grau na equação das cônicas (11) são invariantes por translação de eixos. Portanto, também são as expressões 2 à + C̃ e B̃ − 4ÃC̃. Para que na equação (12) não haja termos do primeiro grau (D̄x̄ e Ē ȳ) devemos ter 0 D̄ 2à B̃ x0 D̃ = = + (13) 0 Ē y0 B̃ 2C̃ Ẽ 2 Esse sistema será possı́vel e determinado se o indicador da cônica I = B̃ − 4ÃC̃ = B 2 − 4AC for não nulo. Se esse for o caso, os valores de (x0 , y0 ) da solução desse sistema fornecem uma translação que elimina os termos de primeiro grau na equação. Neste caso, a equação da cônica em relação ao sistema de eixos cartesianos x̄ȳ toma a forma Āx̄2 B x̄ȳ + C̄ ȳ 2 + F̄ = 0. (14) Quando B̄ = 0 a equação (14) fornece imediatamente as equações reduzidas das cônicas. O desenvolvimento acima, além de permitir reduzir a equação de uma cônica à sua forma reduzida, em relação a um sistema de eixos adequado, também fornece a seguinte classificação: 21 Teorema 4.1 Uma vez determinados os valores do discriminante ∆ = 4ACF + BDE − AE 2 − CD2 − F B 2 e do indicador I = (B)2 − 4AC tem-se: a) Se ∆ = 0 a equação Ax2 + Bxy + Cy 2 + Dx + Ey + F = 0 representa uma cônica degenerada; b) Se ∆ 6= 0 a equação Ax2 + Bxy + Cy 2 + Dx + Ey + F = 0 representa uma cônica suave, que após uma rotação por um ângulo 1 θ = arctag 2 B A−C seguida de uma translação de eixos é representada por uma equação da forma Ax2 + Cy 2 + F = 0, com I = B − 4AC = −4AC. Logo, i) Se I < 0 temos que A e C possuem sinais iguais, e trata-se de uma cônica do gênero elipse; ii) Se I > 0 temos que A e C possuem sinais contrários, e trata-se de uma cônica do gênero hipérbole; iii) Se I = 0 temos que A = 0 ou C = 0, e trata-se de uma cônica do gênero parábola. 4.4.2 O Cabri Géom̀etre II e a redução das cônicas Vamos usar o Cabri Géomètre para simular o efeito das translações e rotações na equação de uma cônica. Para isso, construı́mos alguns macros utilizando os conceitos da seção 4.2.2, as propriedades focais das cônicas e a informação que toda cônica (sua equação cartesiana) é caracterizada por cinco condições geométricas independentes. Em particular, é suficiente o conhecimento das coordenadas de cinco de seus pontos para que possamos determinar sua equação. Observe que se as constantes A, B e C são todas nulas, então a cônica será uma reta ou ponto. Caso contrário, as coordenadas dos cincos pontos de uma cônica fornecem um sistema de ordem cinco. Por exemplo, se A 6= 0 podemos escrever x y + CA y1 + D x +E y + FA = 0 x1 + B A 1 1 A 1 A 1 x2 + B x2 y2 + CA y2 + D x2 + E y2 + FA = 0 A A A x3 + B x y + CA y3 + D x +E y + FA = 0 A 3 3 A 3 A 3 x4 + B x y + CA y4 + D x +E y + FA = 0 A 4 4 A 4 A 4 x5 + B x y + CA y5 + D x +E y + FA = 0 A 5 5 A 5 A 5 A solução desse sistema fornece constantes que determinam a equação da cônica! Uma macro construção para o Cabri que é capaz de “determinar” a equação de uma elipse de foco F1 e diretriz d1 e excentricidade e pode ser construı́da seguindo o roteiro: dado um ponto F1 , uma reta d1 e um segmento de medida e (0 < e < 1) execute os seguintes procedimentos: 22 1. Considere a distância da diretriz ao vértice O a = dist(d1 , F1 ) + c, e em que c é a distância do foco F1 ao vértice O. 2. Determine o valor de a e c pelas fórmulas: e a= .dist(d1 , F1 ) 1 − e2 c = a.e (use a ferramenta calculadora, com opção precis~ ao numérica de 5 dı́gitos); 3. Determine o foco F2 com dist(F1 , F2 ) = 2c, que está situado na semi-reta que tem origem em d, passa por F1 e é perpendicular à reta d (use a ferramenta compasso ou transfer^ encia de medidas) ; 4. Usando o método das tangentes (ver seção 8.2), construa a elipse de focos F1 e F2 e eixo maior de comprimento 2a (P F1 + P F2 = 2a); 5. Determine cinco pontos sobre essa elipse; 6. Use a ferramenta c^ onica pontos para encontrar a elipse sem usar as ferramentas rastro ou lugar geométrico; 7. Retorne a precisão numérica do Cabri para um dı́gito; 8. Determine as equações dos elementos: diretriz, foco e elipse, usando a ferramenta equaç~ oes e coordenadas. Observação 4.4 Uma caracterı́stica interessante nessa construção é que ela permite usar o caráter dinâmico do Cabri para simular translação e rotação de eixos. Construções semelhantes podem ser realizadas para viabilizar a simulação no caso da parábola e da hipérbole. 4.5 Generalizações: algumas quádricas de rotação As superfı́cies de rotação geradas pela rotação de uma cônica de excentricidade e em torno de seu eixo focal (parabolóide de rotação, elipsóide de rotação e hiperbolóide de duas folhas de rotação), admitem uma caracterização como lugar geométrico análogo aos das cônicas. Vamos representar uma tal superfı́cie por Se . Sejam π um plano do espaço, F um ponto que não pertence ao plano π e 0 < e < 1 um número real. 23 A superfı́cie Se de foco F , diretriz π e excentricidade e é o lugar geométrico dos pontos P (x, y, z) tais que dist(P, F ) = e. dist (P, π) Dado uma superfı́cie Se , tomando para eixo x a reta perpendicular ao plano π passando pelo ponto F , e para eixos y e z duas retas perpendiculares entre si e perpendiculares ao eixo x, passando pela interseção O do plano π com o eixo x, obtemos um sistema de eixos coordenados cartesiano para o espaço. Em relação à esse sistema temos π : x = 0 e F (2p, 0, 0). Assim, um ponto de coordenadas (x, y, z) pertence à superfı́cie Se se, e somente, se p (x − 2p)2 + (y − 0)2 + (z − 0)2 dist(P, F ) = . e= dist(P, π) |x| E, podemos escrever (1 − e2 )x2 − 4px + y 2 + z 2 = −4p2 . (15) Quando a excentricidade e assume o valor 1 temos a seguinte equação cartesiana para a superfı́cie S1 y 2 + z 2 = 4p(x − p). 2pe √2pe são positivos e completando o quadrado Para 0 < e < 1 os números a = 1−e 2 e b = 1−e2 na variável x obtemos, após simplificação, a equação cartesiana para a superfı́cie Se 2p x − 1−e 2 2 a 2 + y2 z2 + 2 = 1. b2 b Agora, quando e > 1 o número 1 − e2 é negativo e podemos reescrever a equação como 2p x − 1−e 2 2 a 2 − y2 z2 − 2 = 1, b2 b √2pe são números positivos. em que, a = e2pe 2 −1 e b = e2 −1 Resumindo temos o seguinte: 1. Para e = 1 a equação (15) representa um parabolóide de rotação; 2. Para 0 < e < 1 a equação (15) representa um elipsóide de rotação; 3. Para e > 1 a equação (15) representa um hiperbolóide de duas folhas de rotação. 24 5 Retas tangentes a uma cônica. Já mostramos que a equação geral de uma cônica é da forma Ax + By + Cx + Dy + E = 0. Logo, as interseções de uma reta com uma cônica são dadas analiticamente pelo sistema de equações Ax2 + Bxy + Cy 2 + Dx + Ey + F = 0 y − mx − b = 0. Por uma substituição direta podemos resolvê-lo para x. O resultado é uma equação quadrática ax2 + bx + c = 0 para as coordenadas x da interseção. Tais equações têm no máximo duas soluções. As retas que intersectam as cônicas em dois pontos são denominadas retas secantes. Recordamos que as retas secantes que passam pelos pontos P e Q atingem uma posição limite quando Q tende a P , que se define como a reta tangente à cônica no ponto P . Um exame mais detalhado permite concluir que as retas que intersectam a cônica em um único ponto podem não ser tangentes à cônica (no caso de uma elipse essa é uma condição suficiente). Elas são de um dos seguintes tipos: a) uma reta tangente; b) uma reta paralela ao eixo se a cônica é uma parábola; c) uma reta paralela a uma assı́ntota se a cônica é uma hipérbole. Portanto, uma condição necessária e suficiente para que uma reta seja tangente à uma cônica num ponto P dessa curva é que a reta, menos o ponto P, esteja totalmente contida na região chamada exterior da curva. Podemos dar uma caracterização das tangentes à uma cônica de maneira mais precisa nas seguintes proposições: Proposição 5.1 Sejam P um ponto da parábola de foco F e diretriz d e t a reta bissetriz do ângulo ∠F P D, em que D é pé da perpendicular à reta d passando por P . Temos que t é reta tangente à parábola C no ponto P sendo também a mediatriz do segmento F D. P Q F d D’ O D t Demonstração: Observamos que uma parábola separa os demais pontos do plano em duas regiões: uma, onde cada ponto tem distância ao foco menor que sua distância à diretriz ( interior da curva) e outra onde a distância de cada ponto ao foco é maior que a distância à 25 diretriz ( exterior da curva). Sendo P um ponto da parábola, no triângulo △P F D temos P F = P D. Assim, a reta t, bissetriz do ângulo ∠F P D, é também mediana e altura do triângulo △P F D. Em outras palavras, a reta t é mediatriz do segmento F D. Seja agora Q um ponto qualquer da reta t, distinto de P . Se D̃ é pé da perpendicular à reta d passando por Q temos que m∠QDD′ < m∠QD′ D e, portanto, QF = QD > QD′ , ou seja, Q é exterior à parábola. Logo, concluı́mos que a reta t é tangente à parábola em P . Proposição 5.2 Sejam uma elipse C de diretriz d e focos F1 e F2 e P um ponto de C. −→ Se a reta t é a bissetriz do ângulo determinado pela semi-reta P E, oposta a semi-reta −−→ −−→ P F1 , e pela semi-reta P F2 , então t é a tangente à elipse no ponto P . F´1 E Q P t F1 F2 X Demonstração: Recordamos que a elipse C é o lugar geométrico dos pontos X que satisfazem a propriedade métrica, XF1 + XF2 = k (constante). Como no caso da parábola, a elipse separa os demais pontos do plano em duas regiões: uma, onde cada ponto X satisfaz XF1 + XF2 < k ( interior da curva) e outra onde cada ponto X satisfaz XF1 + XF2 > k ( exterior da curva). Logo, uma reta será tangente à elipse C em um ponto P se, e somente se, intersectar C em P e, qualquer que seja o ponto X da reta distinto de P , se tenha: XF1 + XF2 > k. Seja, agora, um ponto P na elipse C e tomemos uma reta t que −→ −−→ seja bissetriz do ângulo determinado pela semi-reta P E, oposta a semi-reta P F1 , e pela −−→ semi-reta P F2 . Afirmamos que t é a tangente à C em P . De fato, dado um ponto Q em ←−→ t distinto de P , seja F1′ o ponto da reta P F2 com F1 P = P F1′ . Temos que o triângulo △F1′ P F1 é isósceles, logo, a reta t é a mediatriz do segmento F1′ F1 e F1 Q = QF1′ . Segue-se então da desigualdade triangular aplicada ao triangulo △F1′ QF2 que : QF1 + QF2 = F1′ Q + QF2 > F1′ F2 = F1′ P + P F2 = P F1 + P F2 = k. Portanto, Q é exterior à elipse e a reta t é tangente à elipse em P . Proposição 5.3 Sejam uma hipérbole C de diretriz d e focos F1 e F2 e P um ponto de −−→ −−→ C. Se a reta t é a bissetriz do ângulo determinado pelas semi-retas P F1 e P F2 , então t é a tangente à hipérbole no ponto P . 26 t X P A F1 Q F2 Demonstração: Temos que a hipérbole C é o lugar geométrico dos pontos X que satisfazem a propriedade métrica, |XF1 − XF2 | = k (constante). Os dois ramos da hipérbole dividem os pontos do plano em três regiões: uma região compreendida entre os dois ramos ( exterior da curva), onde cada ponto X dessa região satisfaz , |XF1 − XF2 | < k (k < XF1 −XF2 < k) e outras duas que são internas a cada um dos ramos da hipérbole (vamos chamar a união dessas duas regiões de interior da curva). Os pontos X da região interna ao ramo que contém F1 satisfazem a desigualdade XF1 − XF2 < −k e os da região interna ao ramo que contém F2 satisfazem a desigualdade XF1 − XF2 > k. Logo, uma reta será tangente à hipérbole C em um ponto P se, e somente se, intersectar C em P e, qualquer que seja o ponto X da reta distinto de P , |XF1 − XF2 | < k. Sejam, agora, um ponto P da hipérbole −−→ −−→ C e t a bissetriz do ângulo determinado pelas semi-retas P F1 e P F2 . Afirmamos que t é a tangente à C em P . De fato, seja Q um ponto da bissetriz t, distinto de P , e considere −−→ um ponto A da semi-reta P F1 tal que P A = P F2 . Temos |P F1 − P F2 | = P A e, portanto, P A = k. Como o triângulo △AP F2 é isósceles a reta t é a mediatriz do segmento AF2 , assim, o triângulo △AQF2 também é isósceles. E, em particular, temos QA = QF2 . Segue-se da desigualdade triangular aplicada ao triângulo △QAF1 que QA < QF1 + F1 A e QF1 < QA + AF1 . Conseqüentemente, temos QA − AF1 < QF1 < QA + AF1 o que fornece: −AF1 < QF1 − QA < AF1 , ou seja, |QF1 − QA| < AF1 . Como QA = QF2 e AF1 = k obtemos |QF1 − QF2 | < k, para todo ponto Q diferente de P . Portanto, t menos o ponto P está no exterior da hipérbole e concluı́mos que a reta t é tangente à hipérbole em P . 6 Propriedades Refletoras das Cônicas e Aplicações Na fı́sica Clássica, os raios de luz e as ondas sonoras propagam-se no espaço em linha reta e radialmente a partir de sua fonte. Além disso, se a fonte está muito distante de seu destino, essas ondas chegam ao destino formando um feixe praticamente paralelo, como é o caso das ondas de rádio ou as luminosas provenientes de um corpo celeste distante (estrela, galáxia, planetas, etc). Chegando em linha reta elas refletem num ponto de uma superfı́cie suave na mesma direção que refletiriam num plano que é tangente à superfı́cie nesse ponto. Ou seja, seguindo a lei da Fı́sica : “o ângulo de incidência é igual ao ângulo de reflexão”. Por causa da relação especial entre o foco de uma cônica suave e suas tangentes (ver Proposições 5.1, 5.2 e 5.3), superfı́cies refletoras (espelhos, antenas, etc) com o formato de uma superfı́cie de rotação, geradas pela rotação de uma parábola em torno de seu eixo, 27 ou de uma elipse ou hipérbole em torno de seu eixo focal, têm propriedades refletoras que são úteis em várias aplicações tecnológicas. Abaixo apresentamos algumas delas. Superfı́cies refletoras parabólicas (parabolóide): Uma onda de rádio encontrando uma antena receptora parabólica, numa direção paralela ao seu eixo, refletirá na direção do foco da parábola que gera a superfı́cie parabólica (ver Proposição 5.1). Isso justifica porque as antenas que captam sinais do espaço são de formato parabólico, pois é necessário captá-los e concentrá-los em um único ponto para serem tratados, de acordo com o fim a que se destinam. Um fenômeno análogo ocorre com um raio de luz que encontra um espelho parabólico numa direção paralela a seu eixo, ele refletirá no foco da parábola. Como exemplo de aplicação dessa propriedade temos os coletores solares. Por outro lado, os raios luminosos que irradiam de um holofote ou farol de carro refletem em sua superfı́cie, de formato parabólico, de forma que os raios refletidos sejam paralelos. Superfı́cies refletoras elı́pticas (elipsóide): Uma conseqüência da Proposição 5.2 é que uma onda sonora ou luminosa que irradia do “foco” de uma superfı́cie refletora elı́ptica reflete para o outro “foco”. Essa propriedade é usada na construção de refletores odontológicos, aparelhos de emissão de certos raios usados em medicina ou nas salas de sussurros. Os refletores de dentistas usam refletores elı́pticos que têm como objetivo concentrar o máximo de luz onde se está trabalhando e também evitar que os raios luminosos ofusquem a visão do paciente, causando um certo desconforto. O aparelho de radioterapia para tratamento médico emite raios cujo objetivo é destruir tecidos doentes sem afetar os tecidos sadios que se encontram ao reder, sendo assim eles se valem de espelhos elı́pticos para concentrar os raios em um determinado ponto. Existem certas formatos de construções de salas que dão condições acústicas especiais em auditórios, teatros, catedrais, como acontece na Catedral de S. Paulo(Londres) e no 28 edifı́cio do Capitólio em Washington, D. C. Elas são projetadas num formato de parte de um elipsóide de modo que exista dois pontos, onde duas pessoas, uma em cada um desses pontos (“focos” do elipsóide), podem se comunicar em voz sussurrada, inaudı́vel no restante da sala. Superfı́cies refletoras hiperbólicas (hiperbolóide de duas folhas): Consideremos um espelho refletor com o formato de uma folha do hiperbolóide gerado pela rotação de uma hipérbole em torno de seu eixo focal, sendo que a parte refletora está do “lado de externo” do hiperbolóide (parte côncava). Segue da Proposição 5.3 que um raio de luz irradiado de uma fonte A incide segundo uma reta no espelho e é refletido numa direção passando pelo “foco” da outra folha do hiperbolóide. Alguns telescópios denominados refletores usam um espelho hiperbólico secundário, além do refletor parabólico principal, para redirecionar a luz do foco principal para um ponto mais conveniente. Sua construção foi proposta por Cassegrain em 1.672. Ela utiliza um segundo espelho refletor hiperbólico com seu “foco” coincidindo com o foco do espelho principal, de formato parabólico, conforme mostra a figura. Seu objetivo é fazer com que a imagem, após ser refletida, seja formada na posição do foco da outra folha do hiperbolóide. Existem algumas vantagens na montagem desse tipo de telescópio. O famoso telescópio ótico do observatório de Monte Palomar, que fica a 80 Km a noroeste de San Diego, na Califórnia, utiliza várias montagens do tipo de Cassegrain. 29 7 Outras Aplicações das Cônicas Existem outras aplicações que utilizam algumas propriedades das cônicas. Elas aparecem nas construções civis, em problemas de navegação e comunicação. 7.1 O sistema LORAN O sistema LORAN de localização em navegação (Navegação de Longa Distância) permite ao navegante de um navio ou avião achar sua posição sem confiar em marcos visı́veis. Usando para isso o conceito de lugar geométrico que define a hipérbole. Seu princı́pio básico de funcionamento é bastante simples, o qual passamos a descrever. Estações de rádio situadas simultaneamente em posições F1 e F2 emitem sinais que são recebidos pelo navegante situado numa posição P . O navegante mede o intervalo △t = t2 − t1 entre o instante t2 , tempo quando ele recebe o sinal enviado por F2 , e o instante t1 , tempo quando ele recebe o sinal de F1 . Se T1 é o intervalo de tempo que leva o sinal emitido por F1 para alcançar a posição do navegante, e T2 é o intervalo de tempo que leva o sinal emitido por F2 para alcançar a posição do navegante, então a diferença entre a distância da posição do navegante a F1 e a distância da posição do navegante a F2 é P F2 − P F1 = c△t, em que c é a velocidade do som no ar. Portanto, embora o navegante não possa medir T1 e T2 diretamente sem saber quando os sinais foram enviados, ele pode medir com precisão a diferença entre os instantes que os sinais foram recebidos, que é o bastante para determinar que o navio está em algum ponto P da hipérbole cuja equação é P F1 − P F2 = c△t. Assim, o navegante pode localizar sua posição se ele receber sinais de três estações de rádio situadas em F1 , F2 , F3 . 30 F3 P F1 F2 Cada par de estações dá uma hipérbole que contém a posição do navegante, assim sua posição exata é o ponto onde as três hipérboles intersectam. Ela pode ser determinada através da plotagem das três hipérboles em um mapa, obtendo a interseção comum ou usando coordenadas e computando algebricamente a interseção. (Na realidade, seria necessário levar em conta a curvatura da Terra e também que os sinais de rádio podem ter sido refletidos e outras fontes potenciais de erro.) 7.2 Construção de usinas atômicas Podemos mostrar que o hiperbolóide de uma folha gerado pela rotação de uma hipérbole em torno do seu eixo transverso é também gerado por uma reta. Ou seja, ele pode ser considerado como sendo formado por uma união de retas (superfı́cie regrada). Assim, seu formato é usado na construção de centrais de energia atômica, onde barras de aço retilı́neas (que têm alta resistência) se cruzam para obter estruturas extremamente fortes. 8 Construindo Cônicas por Meio de “Dobradura de Papel” no Computador A nossa intuição nos diz que se conhecemos a reta tangente em cada ponto de uma curva plana, então podemos dizer quem é a curva, a menos de sua posição no plano. Na verdade esse é um resultado que pode ser provado num curso de Geometria Diferencial! Usando a caracterização da parábola, elipse e hipérbole por meio de suas propriedades focais e mais as Proposições 5.1 5.2 e 5.3 podemos justificar as construções das cônicas por meio de dobraduras (conhecidas como Método de Van Schooten, holandês que construı́a aparelhos para traçar cônicas). Essas construções fornecem ilustrações (exemplos) para o que afirmamos acima. 31 8.1 A construção da parábola pelo método da dobradura P Q F d D’ O D t Usando uma folha de papel-manteiga execute os seguintes procedimentos: 1. Desenhe uma reta horizontal d (diretriz da parábola), numa folha de papel-manteiga e marque, fora dessa reta, um ponto fixo F (foco da parábola). 2. Selecione um ponto D sobre a reta e dobre o papel-manteiga de forma a fazer coincidir os pontos D e F . A figura abaixo, ilustra a construção de uma dobra. Ela coincide com a reta t tangente à parábola). 3. Repita essa operação para diferentes escolhas de pontos sobre a diretriz. Realizando esta operação um número suficiente de vezes, podemos observar que as dobras parecem tangenciar uma curva que é uma parábola. Uma maneira de simular esta construção no computador é utilizar o software Cabri Géomètre II. Um roteiro para esta simulação é: 1. Construa uma reta d e um ponto F fora da reta d. 2. Utilize a ferramenta ponto sobre objeto e tome um ponto D sobre a reta d. 3. Construa a mediatriz t do segmento DF . 4. Construa a perpendicular l à reta d, por D. 5. Com a ferramenta ponto de interseç~ ao, obtenha o ponto P , interseção de t e l. 6. A parábola é o lugar geométrico dos pontos P quando D se move ao longo da reta d. (ver Proposição 5.1); 7. Utilize a ferramenta rastro para selecionar a mediatriz t e, em seguida, use a ferramenta animação e faça o ponto D mover-se sobre a reta d. O rastro deixado pela reta t faz o papel das dobras! 32 8.2 A construção da elipse pelo método da dobradura D t F2 F1 1. Sobre uma folha de papel-manteiga marque um ponto F1 mais ou menos no centro da folha. 2. Com o auxı́lio do compasso, desenhe dois cı́rculos centrados em F1 e de raios 2a (pelo menos 14 cm de raio) e 2c (c menor do que a). 3. Trace uma semi-reta horizontal com origem em F1 e tome o ponto F2 interseção da semi-reta com o cı́rculo de raio 2c. 4. Escolha um ponto D sobre o cı́rculo de raio 2a e dobre o papel-manteiga de forma a fazer coincidir os pontos D e F2 . A figura acima, ilustra a construção de uma dobra. Ela coincide com a reta t tangente à elipse. 5. Repita essa operação para diferentes escolhas do ponto D. Quando você tiver realizado esta operação um grande número de vezes poderá observar que as dobras parecem tangenciar uma curva. 6. O lugar geométrico dos pontos de tangência P quando D percorre o cı́rculo é uma elipse (ver Proposição 5.2). Um roteiro para simulação da dobradura da elipse usando o Cabri: 1. Construa dois segmentos de medidas 2a e 2c com 2a > 2c. 2. Construa uma reta r e um ponto F1 sobre r. 3. Utilizando a ferramenta compasso, construa dois cı́rculos concêntricos de centro F1 com raios 2a e 2c. 33 4. Com a ferramenta ponto de interseç~ ao obtenha o ponto F2 , ponto de interseção da reta r e o cı́rculo de raio 2c. 5. Utilize a ferramenta ponto sobre objeto e tome um ponto D sobre o cı́rculo de raio 2a. 6. Construa a mediatriz t do segmento DF2 . 7. Construa a reta l passando por F1 e D. 8. Com a ferramenta ponto de interseç~ ao obtenha o ponto P , interseção de t e l. 9. A hipérbole é o lugar geométrico dos pontos P quando D se move ao longo do cı́rculo. Justifique! 10. Utilize a ferramenta rastro para selecionar a mediatriz t e, em seguida, faça o ponto D mover-se sobre o cı́rculo. 8.3 A construção da hipérbole pelo método da dobradura A construção da hipérbole via dobradura é muito semelhante à da elipse um roteiro para simular esta construção utilizando o Cabri é dado pelos seguintes procedimentos: 1. Construa dois segmentos de medidas 2a e 2c com 2a < 2c. 2. Construa uma reta r e um ponto F1 sobre r. 3. Utilizando a ferramenta compasso, construa dois cı́rculos concêntricos de centro F1 com raios 2a e 2c. 4. Com a ferramenta ponto de interseç~ ao obtenha o ponto F2 , ponto de interseção da reta r e o cı́rculo de raio 2c. 5. Utilize a ferramenta ponto sobre objeto e tome um ponto D sobre o cı́rculo de raio 2a. 6. Construa a mediatriz t do segmento DF2 . 7. Construa a reta l passando por F1 e D. 8. Com a ferramenta ponto de interseç~ ao obtenha o ponto P , interseção de t e l. 34 9. A hipérbole é o lugar geométrico dos pontos P quando D se move ao longo do cı́rculo. Justifique! 10. Utilize a ferramenta rastro para selecionar a mediatriz t e, em seguida, faça o ponto D mover-se sobre o cı́rculo. 11. Observando a simulação, descreva um procedimento para construir uma parábola através de dobradura de papel. 9 Alguns Aparatos Usados na Construção de Cônicas Nessas construções vamos precisar trabalhar numa prancheta de madeira de dimensões mı́nimas 50 × 60 × 2 cm. Também usaremos alguns materiais como: régua simples de madeira, uma régua de madeira no formato de T , tesoura, barbante, lápis e pregos ou percevejos. Construindo uma parábola: P F V d 1. Fixe um prego num ponto F (foco da parábola) da prancheta. 2. Considere a lateral da prancheta como a diretriz d da parábola. 3. Corte um pedaço de barbante pouco maior que o comprimento da régua T . 4. Prenda uma extremidade do barbante na extremidade do tronco da régua T e a outra no foco F , de modo que a parte livre do barbante tenha exatamente o comprimento da régua. 5. Trace uma curva deslizando a régua T ao longo da diretriz, enquanto mantém o barbante esticado com seu lápis e em contato com o tronco da régua T . A curva é parte de uma parábola com foco F e diretriz d. Observe que a distância da ponta do lápis à diretriz é igual à distância ao ponto F. Portanto, a curva que o lápis descreve é uma parábola. (Ver caracterização focal da parábola) Construindo uma elipse: P F2 F1 35 1. Fixe dois pregos na prancheta nos pontos F1 e F2 . 2. Tome um pedaço de barbante cujo comprimento seja maior que a distância F1 F2 . A amarre suas pontas em F1 e F2 de modo que a parte livre do barbante ligando os dois pregos tenha comprimento l = 2a. 3. Trace uma curva com o lápis ao redor dos dois pregos mantendo o barbante esticado. A curva traçada será uma elipse com focos F1 e F2 , satisfazendo a equação P F1 +P F2 = 2a para todo ponto P da curva. . (Ver caracterização focal da elipse) Construindo uma hipérbole I: F1 F2 1. Prenda uma extremidade da régua simples de madeira sobre a prancheta com um prego no ponto F1 , de modo a permitir que ela gire em torno do prego. 2. Fixe um segundo prego na prancheta no ponto F2 . 3. Tome um pedaço de barbante com comprimento tal que 0 < (comprimento da régua) − (comprimento do barbante) < F1 F2 . 4. Mantenha o lápis em contato com a régua de modo a deixar o barbante esticado. Ao mesmo tempo gire a régua em torno de F1 . A curva que o lápis descreve é parte de uma ramo da hipérbole que satisfaz a equação P F1 − P F2 = (comprimento da régua) − (comprimento do barbante) para todos os pontos P. Construindo uma hipérbole II: P F2 F1 1. Fixe dois pregos na prancheta nos pontos F1 e F2 . 2. Tome um pedaço de barbante cujo comprimento seja bem maior que duas vezes a distância F1 F2 . 3. Passe o barbante em torno de F2 e por cima de F1 , mantendo juntas suas extremidades. Em seguida, amarre um lápis, em P , em uma das partes do barbante, mantendo-o esticado conforme mostra a figura. 36 4. Puxe ou afrouxe simultaneamente as duas pontas do barbante, mantendo-o esticado através do lápis. A diferença inicial P F1 − P F2 = 2a manter-se-á constante e o lápis (ponto P ) descreverá um ramo da hipérbole com focos F1 e F2 , satisfazendo a equação P F1 − P F2 = 2a para todo ponto P da curva. Referências [1] Baldin, Y. Y. ET. Alli., Atividades com Cabri-Géomètre II, São Carlos: Editora EdUFSCar, 2002. [2] Boyer, C. B., História da Matemática, Editora Edgard Blücher Ltda, São Paulo, 1.974 [3] Gonçalves, Z. M., Geometria Analı́tica: Um Tratamento Vetorial Vol 1 e 2, LTC, Rio de Janeiro, 1.978. [4] Jennings, G. A., Modern Geometry with applications, Springer-Verlag, New York. [5] Lindquist, M. M and Shulte A. P., Aprendendo e Ensinando Geometria, Tradução: Domingues, H. H.,Editora Atual,São Paulo 1998. [6] Revista do Professor de Matemática, IMPA-SBM, Rio de Janeiro. 37
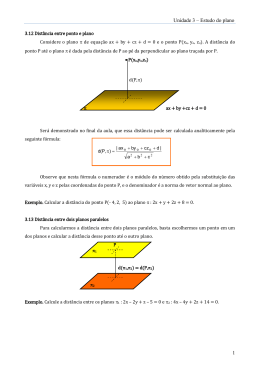
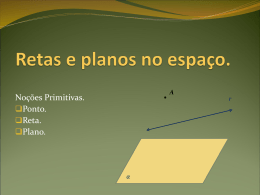
Baixar