NOTAS DE AULA
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
RETAS E PLANOS
ERON E ISABEL
SALVADOR – BA
2007
EQUAÇÕES DA RETA
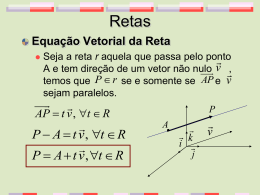
EQUAÇÃO VETORIAL DA RETA
DEF: Qualquer vetor não nulo paralelo a uma reta chama-se vetor diretor dessa reta.
Sejam v um vetor diretor de uma reta r e A um ponto de r.
r
X
A
v
AX = t v, t ∈ R
⇔
X = A + t v, t ∈ R
Exemplos:
a) Uma equação vetorial da reta que passa pelos pontos A(-5, 2, 3) e B(4,-7,-6) é:
X = A + t AB ⇒ (x, y, z) = (-5, 2, 3) + t (9,-9, -9), t ∈ R
ou ainda, (x, y, z) = (-5, 2, 3) + t (1,-1, -1), t ∈ R
b) As equações vetoriais dos eixos coordenados são
X = O + t i , eixo das abscissas
X = O + t j , eixo das ordenadas
X = O + t k , eixo das cotas
INTERPRETAÇÃO FÍSICA DA EQUAÇÃO VETORIAL
Podemos interpretar a equação X = A + t v como o movimento descrito por um ponto
sobre a reta r, com velocidade constante (vetorial) igual a v , t indicando o tempo e A a
posição no instante inicial t = 0. Valores negativos de t indicam o “passado” do movimento,
em relação ao instante inicial. A cada valor de t temos uma posição bem determinada do
ponto móvel e fazendo t percorrer todo o conjunto R, a reta r é percorrida integralmente pelo
ponto (r representa a trajetória do movimento). Como há muitos movimentos retilíneos
uniformes com a mesma trajetória, fica fácil entender por que existem muitas equações
vetoriais para a mesma reta.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
1
EQUAÇÕES PARAMÉTRICAS DA RETA
(
)
Seja O, e1 , e2 , e3 um sistema de coordenadas cartesianas no espaço.
Consideremos em relação a este sistema:
X(x, y, z) um ponto genérico, A(x0, y0, z0) um ponto dado e v = (a, b, c) um vetor diretor
da reta r.
Escrevendo a equação vetorial da reta em coordenadas, obtemos
(x, y, z) = (x0, y0, z0) + t (a, b, c)
ou seja,
x = x0 + at
y = y0 + bt
z = z + ct
0
, t∈R
que é o sistema de equações paramétricas da reta r.
Exemplo: As equações paramétricas do eixo coordenado y são
x = 0 + t ⋅ 0
y = 0 + t ⋅1
z = 0 + t ⋅ 0
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
x = 0
⇒ y = t , t ∈ R
z = 0
ERON E ISABEL
2
EQUAÇÕES DA RETA NA FORMA SIMÉTRICA
Se nenhuma das coordenadas do vetor diretor é nula, podemos isolar t no primeiro membro de
cada uma das equações paramétricas da reta e obter
x − x0 y − y 0 z − z 0
=
=
a
b
c
Exercícios:
1) Seja r a reta determinada pelos pontos A(1,0,1) e B(3,-2,3).
a) Obtenha equações de r nas formas vetorial, paramétrica e simétrica.
b) Verifique se o ponto P(-9,10,-9) pertence à reta r.
c) Obtenha dois vetores diretores de r e dois pontos de r, distintos de A e B.
2x −1 1 − y
= z + 1 descrevem uma reta, escrevendo-as de modo
=
3
2
que possam ser reconhecidas como equações na forma simétrica. Exiba um ponto e um
vetor diretor da reta.
2) Mostre que as equações
3) Escreva na forma simétrica a equação de uma reta no plano yz.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
3
PLANOS
POSTULADOS:
•
•
•
•
Por uma reta pode-se traçar uma infinidade de planos.
Por três pontos não alinhados passa um único plano.
A reta que passa por dois pontos distintos de um plano está contida nesse plano.
Toda reta pertencente a um plano divide-o em duas regiões chamadas semi-planos.
DETERMINAÇÃO:
•
•
•
•
Por uma reta e um ponto não pertencente à reta, passa um único plano.
Por duas retas paralelas (não coincidentes) passa um único plano.
Por duas retas concorrentes passa um único plano.
Por três pontos não alinhados passa um único plano.
EQUAÇÕES DO PLANO
DEF: Se u e v são LI e paralelos a um plano π , u e v são ditos vetores diretores de π .
EQUAÇÃO VETORIAL DO PLANO
Sejam u e v vetores diretores de um plano π , A um ponto fixo de π e X um ponto genérico
de π .
É claro que u , v e AX são LD, pois são coplanares.
Como u e v são LI, temos AX = X − A = λ u + µ v , ou seja,
r
r
X = A + λu + µ v , λ , µ ∈ R
u
v
u
A
v
X
Exemplo: Dada uma reta r: X = A + λ v e um ponto P ∉ r , podemos determinar o plano
π : X = A + λ v + µ AP, λ , µ ∈ R.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
4
EQUAÇÕES PARAMÉTRICAS DO PLANO
(
)
Seja O, e1 , e2 , e3 um sistema de coordenadas cartesianas no espaço.
Consideremos em relação a este sistema:
X (x, y, z) um ponto genérico,
A (x0, y0, z0) um ponto dado,
r
r
u = ( a1 , b1, c1 ) e v = ( a2 , b2, c2 ) vetores diretores de um plano π .
Escrevendo a equação vetorial do plano em coordenadas, obtemos
(x, y, z) = (x0, y0, z0) + λ (a1, b1, c1) + µ (a2 , b2 , c2 )
ou seja,
x = x0 + λa1 + µa 2
y = y 0 + λb1 + µb2
z = z + λc + µc
0
1
2
, λ, µ ∈ R
que é o sistema de equações paramétricas do plano π .
Exercício: Seja π o plano que contém o ponto A(3, 7, 1) e é paralelo a u = (1,1,1) e v = (1,1,0) .
a) Obtenha duas equações vetoriais de π.
b) Escreva equações paramétricas de π.
c) Verifique se o ponto (1, 2, 2) pertence a π.
d) Verifique se o vetor w = (2,2,5) é paralelo a π.
EQUAÇÃO GERAL DO PLANO
Considerando que u , v e AX são LD, temos que
x − x0 y − y0 z − z0
a1
a2
(x − x0 ) ⋅
b1
b2
Sejam a =
c1
c
+ ( y − y0 ) ⋅ 1
c2
c2
b1
b2
c1
c
,b= 1
c2
c2
b1
b2
c1
c2
a1
a
+ ( z − z0 ) ⋅ 1
a2
a2
a1
a
e c= 1
a2
a2
b1
b2
= 0 , isto é,
b1
= 0.
b2
e a equação acima poderá ser reescrita
como:
a ⋅ ( x − x0 ) + b ⋅ ( y − y 0 ) + c ⋅ ( z − z 0 ) = 0
ax + by + cz − (ax0 + by 0 + cz 0 ) = 0
ax + by + cz + d = 0,
onde d = −(ax0 + by0 + cz0 )
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
5
Exercícios:
1) Obtenha a equação geral do plano π em cada caso.
a) π contém o ponto A(9,-1,0) e é paralelo aos vetores u = (1,1,1) e v = (0,1,0) .
b) π contém os pontos A(1,0,1), B(-1,0,1) e C(2,1,2).
x = 1 + 2λ − 3µ
c) π tem equações paramétricas y = 1 + λ + µ .
z = −λ − µ
2) Obtenha equações paramétricas do plano π: x + 2 y − z − 1 = 0 .
INTERSEÇÃO DE UM PLANO COM OS EIXOS COORDENADOS
Seja α: ax + by + cz + d = 0 . O plano α intercepta:
o eixo das abscissas no ponto A(x,0,0), determinado ao se substituir y = z = 0 na equação
do plano;
o eixo das ordenadas no ponto B(0,y,0), determinado fazendo x = z = 0;
o eixo das cotas no ponto C(0,0,z), determinado ao se substituir x = y = 0.
Exemplo: Determine os pontos de interseção do plano α: 4 x + 3 y − z − 12 = 0 com os eixos
coordenados. Faça os cálculos e observe abaixo a plotagem no sistema cartesiano.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
6
VETOR NORMAL A UM PLANO
•
•
Se o plano é dado na forma vetorial X = A + λ u + µ v, λ , µ ∈ R , o vetor normal é dado
por w = u × v .
Se o plano é dado na forma geral ax + by + cz + d = 0 , o vetor (a, b, c) é chamado
vetor coeficiente do plano π . Se estas coordenadas estão em relação a um sistema
ortogonal, (a, b, c) é um vetor normal ao plano π .
w
u
A
v
X
π
CASOS PARTICULARES DA EQUAÇÃO GERAL DO PLANO
A nulidade de um ou mais coeficientes na equação geral do plano fará com que este ocupe um
posicionamento particular em relação aos eixos coordenados.
Na equação ax + by + cz + d = 0 , se:
1º caso:
d = 0 ⇒ ax + by + cz = 0 , com a ⋅ b ⋅ c ≠ 0 ⇒ o plano contém a origem.
2º caso:
a) a = 0 ⇒ by + cz + d = 0 , com b ⋅ c ⋅ d ≠ 0 ⇒ o plano é paralelo ao eixo das abscissas.
b) b = 0 ⇒ ax + cz + d = 0 , com a ⋅ c ⋅ d ≠ 0 ⇒ o plano é paralelo ao eixo das ordenadas.
c) c = 0 ⇒ ax + by + d = 0 , com a ⋅ b ⋅ d ≠ 0 ⇒ o plano é paralelo ao eixo das cotas.
3º caso:
a) a= d = 0 ⇒ by + cz = 0 , com b ⋅ c ≠ 0 ⇒ o plano conterá o eixo das abscissas.
b) b= d = 0 ⇒ ax + cz = 0 , com a ⋅ c ≠ 0 ⇒ o plano conterá o eixo das ordenadas.
c) c= d = 0 ⇒ ax + by = 0 , com a ⋅b ≠ 0 ⇒ o plano conterá o eixo das cotas.
Plano paralelo ao eixo 0x
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
Plano que contem o eixo 0x
ERON E ISABEL
7
4º caso:
a) a= b = 0 ⇒ cz + d = 0 , com c ⋅ d ≠ 0 ⇒ o plano é paralelo ao plano xy.
b) a= c = 0 ⇒ by + d = 0 , com b ⋅ d ≠ 0 ⇒ o plano é paralelo ao plano xz.
c) b= c = 0 ⇒ ax + d = 0 , com a ⋅ d ≠ 0 ⇒ o plano é paralelo ao plano yz.
Exemplo: Indique o posicionamento de cada plano em relação ao sistema cartesiano.
a) 3x + y – 4z = 0 ⇒ plano que passa pela origem.
b) 2x + 3z – 3 = 0 ⇒ plano paralelo ao eixo 0y.
c) 4x + 3y = 0 ⇒ plano que contem o eixo 0z.
d) x – 3 = 0 ⇒ plano paralelo ao plano yz.
OBS: No R² a equação 2x + 3y – 6 = 0 representa uma reta. Entretanto, no R³ tal equação
representa um plano paralelo ao eixo 0z. Observe a figura.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
8
POSIÇÕES RELATIVAS ENTRE RETAS E PLANOS NO ESPAÇO R3
POSIÇÕES RELATIVAS ENTRE RETAS
Sejam r e s retas no R³. Elas podem ser:
•
•
r ∩ s = {P}
concorrentes ⇒
caso particular : r ⊥ s
Coplanares ⇒
paralelas (r // s ) ⇒ r ∩ s = Φ
r ∩ s = r = s
r ∩ s = Φ
Reversas: ⇒
caso particular : r ⊥ s
não existe nenhum plano que contenha as duas
retas
CONDIÇÃO PARA RETAS COPLANARES:
Sejam r : X = A + t1 vr e s : X = B + t 2 v s , t1 , t 2 ∈ R , duas retas no R³.
[
]
r e s são coplanares ⇔ vr , vs , AB = 0
concorrentes (r ∩ s = P ) ⇔ vr e v s são LI
Neste caso, ainda podemos ter:
paralelas (r // s ) ⇔ vr e vs são LD
[
]
Se vr , v s , AB ≠ 0 , temos r e s retas reversas.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
9
CONDIÇÃO DE ORTOGONALIDADE:
r e s são ortogonais ⇔ vr ⋅ vs = 0
Se além dessa condição r e s têm um ponto comum elas são chamadas perpendiculares.
x+5
z −6
x−2 y z −5
= =
= y+3=
são
e s:−
2
3
4
1
3
coplanares. Elas são concorrentes? Em caso afirmativo, determine o ponto de interseção.
Exercício: Verifique se as retas r :
POSIÇÕES RELATIVAS ENTRE UMA RETA E UM PLANO
Sejam r uma reta e π um plano. Temos:
r ∩ π = Φ
• r // π ⇒
r ∩ π = r , ou seja , r ⊂ π
• r não é paralela a π ⇒ r ∩ π = {P}
Sejam r : X = A + t vr e π : ax + by + cz + d = 0 , onde w = (a, b, c ) é o vetor normal de π.
•
•
r // π ⇔ vr ⋅ w = 0
Se além disso P (ponto de r) também pertence a π, temos r ⊂ π .
vr ⋅ w ≠ 0 ⇔ r ∩ π = {P}
vr e w são LD ⇔ r ⊥ π
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
10
Exercício: Verifique se r : X = (2,3,1) + λ (1,−1,4) e π : X = (−4,−6,2) + λ (2,1,3) + µ (3,3,2) se
interceptam. Em caso afirmativo, obtenha a intersecção.
POSIÇÕES RELATIVAS ENTRE PLANOS
Sejam π 1 e π 2 dois planos. Eles podem ser:
•
•
π ≡ π 2
π 1 // π 2 ⇒ 1
π 1 ∩ π 2 = Φ
π1 ∩π 2 = r
Sejam π 1 : a1 x + b1 y + c1 z + d1 = 0 e π 2 : a2 x + b2 y + c2 z + d 2 = 0 as equações gerais dos dois
(
)
planos em relação ao sistema de coordenadas O, e1 , e2 , e3 .
a1 = ta2
π 1 // π 2 ⇔ w1 e w2 são LD, ou seja, w1 = t w2 , t ∈ R ⇔ b1 = tb2
c = tc
2
1
Se além disso, P = ( x0 , y0 , z 0 ) ∈ π 1 , π 2 , temos:
d1 = −(a1 x0 + b1 y0 + c1 z 0 ) e d 2 = −(a 2 x0 + b2 y0 + c2 z 0 )
ou seja,
d1 = −(ta 2 x0 + tb2 y 0 + tc2 z 0 ) e d 2 = −(a 2 x0 + b2 y0 + c2 z 0 )
então,
d1 = t d 2
a1 = ta2
b = tb
2
π1 ≡ π 2 ⇔ 1
, t ∈ R.
c
=
tc
1
2
d1 = td 2
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
11
Se w1 e w2 são LI, temos π 1 ∩ π 2 = r .
a1 x + b1 y + c1 z + d1 = 0
O sistema de equações r :
define esta reta r e é chamado equação da
a2 x + b2 y + c2 z + d 2 = 0
reta na forma planar, ou ainda, forma geral da reta.
Notemos que vr = w1 × w 2
π 1 ⊥ π 2 ⇔ w1 ⋅ w 2 = 0
Ex: Determine a intersecção dos planos π 1 e π 2 . Quando se tratar de uma reta, descreva-a por
equações paramétricas.
a) π 1 : x + 2 y + 3z − 1 = 0 e π 2 : x − y + 2 z = 0
b) π 1 : x + y + z − 1 = 0 e π 2 : 2 x + 2 y + 2 z − 1 = 0
c) π 1 : x + y + z − 1 = 0 e π 2 : 3x + 3 y + 3 z − 3 = 0
ÂNGULOS
ÂNGULO ENTRE DUAS RETAS
Sejam r e s duas retas, vr um vetor diretor de r e v s um vetor diretor de s. O ângulo (ou
medida angular) entre as retas r e s é a medida angular entre os vetores vr e v s , se esta
π
pertence ao intervalo 0, (em radianos), e é a medida angular entre os vetores vr e – v s ,
2
π
se esta pertence ao intervalo , π .
2
Para θ = (r , s ) , temos cosθ =
vr ⋅ vs
vr ⋅ v s
Ex: Calcule o ângulo entre as retas r: X = (1,1,9) + t (0,−1,1) e s: x – y + 3 = z = 4.
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
12
ÂNGULO ENTRE RETA E PLANO
Sejam r uma reta e π um plano. O ângulo formado entre r e π é o complemento do ângulo
entre as retas r e s, sendo s uma reta qualquer perpendicular a π.
s
r
wπ
vr
ϕ
θ=
θ
π
π
2
−ϕ ,
θ = arcsen
onde cosϕ =
vr ⋅ wπ
vr ⋅ wπ
vr ⋅ wπ
vr ⋅ wπ
Ex: Obtenha o ângulo em radianos entre a reta r : X = (0,1,0) + t (− 1,−1,0) e o plano
π : y + z − 10 = 0 .
ÂNGULO ENTRE PLANOS
O ângulo entre os planos π 1 e π 2 é o ângulo formado pelas suas respectivas retas normais.
cosθ =
wπ 1 ⋅ wπ 2
wπ 1 ⋅ wπ 2
Ex: Determine o ângulo entre os planos π 1 : 2 x − y − z + 1 = 0 e π 2 : 3x − 2 y + 1 = 0 .
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
13
DISTÂNCIAS
(
)
Consideremos 0, i, j , k um sistema ortogonal.
DISTÂNCIA ENTRE DOIS PONTOS
Sejam A = ( x1 , y1, z1 ) e B = ( x2 , y2 , z2 ) dois pontos.
d ( A, B ) = AB = ( x2 − x1, y2 − y1, z2 − z1 )
d ( A, B ) =
(x2 − x1 )2 + ( y2 − y1 )2 + (z2 − z1 )2
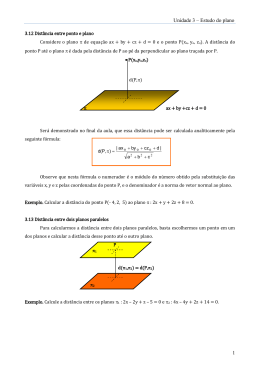
DISTÂNCIA ENTRE UM PONTO E UM PLANO
Sejam π : ax + by + cz + d = 0 um plano, P ( x0 , y0 , z0 ) um ponto no espaço e P ' ( x1 , y1 , z1 )
um ponto de π.
Temos que d (P, π ) = d (P, A) = AP
P
A
.P’
π
r
Seja r uma reta ortogonal ao plano π passando por P: π ∩ r = {A}.
(
)
AP = Proj P' P = Proj P' P = P' P ⋅ wπ ° ⋅ wπ °
vr °
wπ °
AP = P' P ⋅ wπ ° ⋅ wπ °
= ( x0 − x1 , y0 − y1 , z 0 − z1 ) ⋅
=
=
(a, b, c )
a2 + b2 + c2
ax0 − ax1 + by0 − by1 + cz 0 − cz1
a2 + b2 + c2
ax0 + by 0 + cz 0 − (ax1 + by1 + cz1 )
a2 + b2 + c2
Como P’∈ π, temos ax1 + by1 + cz1 + d = 0 , ou seja, d = −(ax1 + by1 + cz1 ) .
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
14
Logo,
d ( P, π ) =
ax0 + by0 + cz0 + d
a2 + b2 + c2
Exemplo: Determine a distância entre o plano π : 3 x + 2 y + z − 1 = 0 e o ponto P (1, −1, 2 ) .
DISTÂNCIA ENTRE UM PONTO E UMA RETA
Sejam r : X = A + t vr , t ∈ R uma reta e P ( x0 , y0 , z0 ) um ponto no espaço.
P
P’
A
vr
d(P,r) = d(P,P’) = P' P
Temos sen θ =
P' P
AP
r
(
)
, onde θ = AP', AP .
Logo,
P' P = AP sen θ =
AP ⋅ vr ⋅ sen θ
vr
d (P, r ) =
AP × vr
vr
Ex: Determine a distância entre o ponto P(3,2,1) e a reta r : X = (1,0,−1) + t (1,2,1) .
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
15
APLICAÇÕES
(
Distância entre dois planos paralelos: d (π 1 , π 2 ) = d Pπ 1 , π 2
)
Distância entre duas retas paralelas: d (r , s ) = d (Pr , s )
Distância mínima entre duas retas reversas:
sendo π um plano que contém r e s // π , d (r , s ) = d (Ps , π )
r
P
π1
s
P
π2
P
r
s
π
x −2
=z
x −1 y − 2
Ex: Determine a distância mínima entre as retas reversas r :
=
e s: 5
.
2
−1
y = z − 1
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
16
EXERCÍCIOS DE FIXAÇÃO
r
r
1. Dados A(1,2,3) e v = ( 3, 2,1) , escreva equações da reta que contém A e é paralela a v ,
nas formas vetorial, paramétrica e simétrica. Supondo que o sistema de coordenadas seja
ortogonal, obtenha dois vetores diretores unitários dessa reta.
2. Obtenha dois pontos e dois vetores diretores da reta de equações paramétricas
x = 1− λ
, λ ∈ R . Verifique se os pontos P (1,3, −3) e Q ( −3, 4,12 ) pertencem à reta.
y = λ
z = 4 + 2λ
3. Obtenha equações paramétricas da reta que contém o ponto (1, 4, −7 ) e é paralela à reta
x = 200 − λ
de equações paramétricas y = 3 − 3λ , λ ∈ R .
z = 0
4. Escreva equações nas formas paramétricas e simétricas da reta que contém o ponto
1− x 3y z + 3
A ( 2, 0, −3) e é paralela à reta descrita pelas equações
=
=
.
5
4
6
uuur
uuur
5. Sejam A (1, 2,5) e B(0,1,0). Determine o ponto P da reta AB tal que PB = 3 PA .
6. Sejam A(1,1,1) , B(0,0,1) e r:
eqüidistantes de A e B.
X = (1, 0, 0 ) + λ (1,1,1) . Determine os pontos de r
7. Obtenha equações paramétricas do plano que contém o ponto A(1,1,2) e é paralelo ao
x = 1 + λ + 2µ
plano π : y = 2λ + µ .
z = −λ
8. Obtenha equações paramétricas e gerais dos planos coordenados.
9. Decomponha
r
v = (1, 2, 4)
como
soma
de
um
vetor
paralelo
à
reta
x = 1+ λ
r : X = (1,9,18 ) + λ ( 2,1, 0 ) com outro paralelo ao plano π : y = 1 + µ
z = λ − µ
10. Obtenha uma equação geral do plano π em cada caso:
r
a. π contém A (1,1, 0 ) e B(1,-1,-1) e é paralelo a v = ( 2,1, 0 ) .
b. π contém A (1, 0,1) , B(2,1,-1) e C(1,-1,0).
x −1 y
= = 2− z
2
3
d. π contém P (1, −1,1) e r : X = ( 0, 2, 2 ) + λ (1,1, −1)
c. π contém P (1, 0, −1) e r :
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
17
11. Dadas as equações paramétricas, obtenha uma equação geral do plano:
x = 1+ λ − µ
x = −2 + λ − µ
a. y = 2λ + µ
b. y = 2λ + 2µ
z = 3 − µ
z = λ + µ
12. Dada uma equação geral, obtenha equações paramétricas do plano.
a. 4x + 2y – z + 5 = 0
b. 5x – y – 1 = 0
c. z – 3 = 0
d. y – z – 2 = 0
13. Determine a interseção da reta
x y
= = − z com o plano x + 2 y + z − 9 = 0.
6 2
14. Determine a equação do plano que passa pelo ponto A(1,1,-2) e é perpendicular à reta
r: X = t (3, − 1, − 3).
15. Obtenha a equação do plano que passa por P(1,2,1) e cujo traço com o plano z = 0 é a
y = 3x + 2
reta r:
z = 0
x = t
16. Obtenha a equação do plano que passa pela reta r: y = −t e é perpendicular ao plano
z = 2 + t
π : x − 2y + z − 1 = 0.
x = z +1
17. Obtenha a equação do plano que passa pela reta r : x = y = - z e é paralelo à reta s :
.
y = 3z - 2
18. Dado o triedro cujas arestas são as retas x = 2y = z, – x = y = z e x = – 3y =2z, determine a
equação dos planos das faces.
19. Determine as equações da reta que passa pelo ponto P ( 2,1, −1) e é perpendicular ao
plano X = λ ( 2 ,1, −1) + µ ( 3, 2 ,5 ) .
20. Determine as equações da reta que passa pela origem, é paralela ao plano
y+2
3 x − 2 y + z − 2 = 0 e intercepta a reta x − 1 =
= z.
3
x − 3 y +1 z − 2
=
=
, determine as coordenadas dos pontos de intersecção
2
5
−1
com os planos coordenados.
21. Dada a reta
22. Determine as equações paramétricas da reta que passa pelo ponto P (1, −2, −1) e
x = z −1
y = 2z − 3
intercepta as retas reversas r :
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
x = z − 2
.
e s :
y = −z +1
ERON E ISABEL
18
23. Determine as equações paramétricas da reta perpendicular comum às retas reversas
y −1 z
r: x − 1 = 2 = − 1
s: x = y = z
2
−2
24. Verifique se as retas
x−4 y z−6
e X = (1,1,1) + λ ( 2 ,1, −3 ) são coplanares.
= =
3
2
5
25. Determine o ponto simétrico de P (1, 2 ,-1)
a. em relação à reta x − 1 = y = z
b. em relação ao plano 2 x − y + z − 1 = 0
26. Determine o lugar geométrico dos pontos médios dos segmentos que se apóiam nas retas
reversas r : X = ( 0,1, −1) + λ (1, 0,1) e s: X = ( 3, −1, 4 ) + µ (2,1, −3) .
27. Determine o plano que passa pela reta r:
x−2 y+3
=
= z e pelo ponto comum aos três
3
2
x + y + 2z + 1 = 0
planos 3x − y + z − 1 = 0 .
x − 4 y + 2z + 2 = 0
uuur
28. Dado um plano π : X = ( 0,0,1) + λ (1, −1, −1) + µ ( −1, −2, −4 ) e a reta r que passa por AB ,
sendo A ( 0,0,0 ) e B (1,1,1) , determine a equação do plano que passa pelo ponto onde a
reta r intercepta o plano π e é paralelo ao plano π 1 : x − 3 = 0 .
r
r r
r
29. Decomponha o vetor v = ( 2, −1,3) em dois vetores u e w , de modo que u seja paralelo
r
ao plano π : 2 x − y + z − 3 = 0 e w ortogonal ao plano π .
30. Considerando os pontos A ( −1, −3, 4 ) , B ( −2,1, −4 ) e C ( 3, −11,5) , mostre que o triângulo
ABC é isósceles.
31. Determine a distância entre o ponto P e a reta r nos seguintes casos.
2 x − y + z = 0
x −1
z+2
a) P (1,2, − 1) e r:
= −y =
;
b) P (1, − 1,0) e r:
2
3
3 x + y − 2 z + 1 = 0
32. Determine a distância entre o ponto P e o plano π nos seguintes casos :
a) P ( 2,1, − 3) e π : X = (1, 2, −1) + λ ( 3, 2, −1) + µ (1, 0, 0 )
x = 2λ + µ
b) P (0,0, − 1) e π : y = −λ − µ
z = 1 − 2µ
33. Determine o lugar geométrico dos pontos eqüidistantes dos dois planos dados:
π 1 : 2 x − y + z − 1 = 0
π 2 : x + y − z + 2 = 0
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
19
34. Determine o ângulo entre as retas r :
x −1
= y = − z e s : X = (1, 0, 0) + λ (2,1, −1).
2
35. Determine o ângulo da reta r : x = − y = z com o plano π : 2 x − y − z − 1 = 0 .
36. Determine o ângulo entre os planos
π1 : X = (1,1,1) + λ ( 2,1,3) + µ (1, −1, 2 )
e
π 2 : 2x − y − z = 0 .
37. Obtenha as equações da reta que passa pelo ponto P (1, 0,1) e intercepta a reta
t : x = y = z + 1 formando um ângulo de
π
3
radianos.
38. Pela reta PQ, P (1, −1, 0), Q (0, −2, −1) , conduza o plano que faz um angulo de
π
radianos com o plano x + 2 y − 3 z + 2 = 0 .
3
39. Dado o tetraedro de vértices A(1,2,1), B(2,–1,1), C(0, –1, –1) e D(3,1,0), calcule a
medida da altura baixada do vértice D ao plano da face ABC.
40. Do paralelepípedo dado a seguir sabe-se que:
i. O plano ABC : x + y − z + 6 = 0 e a
reta DG: X = t (1, 2, −3) , t ∈ R .
ii. O plano ABF é perpendicular ao
plano ABC e F(0,2,0).
Determine:
a. As equações simétricas da reta AF.
b. As equações paramétricas do plano ABF.
c. As coordenadas do ponto D.
d. A equação geral do plano EFG.
Respostas
x = 1 + 3t
x −1 y − 2
2
1
r
3
1. X = (1,2,3) + t (3, 2,1), t ∈ R , y = 2 + 2t ,
=
= z −3, v = ±
,
,
3
2
14 14 14
z = 3 + t
r
r
2. A = (1, 0, 4 ) , B = ( 0,1, 6 ) , u = ( −1,1, 2 ) e v = ( 2, −2, −4 ) . P ∉ r e Q ∈ r .
x = 1− λ
3. r : y = 4 − 3λ , λ ∈ R
z = −7
5.
3 5 15
3 7 15
P= , , ou P= , ,
2 2 2
4 4 4
x = 2 − 5λ
4
x−2 y z +3
4. r : y = λ
,λ ∈ R e
= =
3
−15 4
18
z = −3 + 6λ
6. P= (1, 0, 0 )
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
x = 1 + λ + 2µ
7. α : y = 1 + 2λ + µ ,
z = 2 − λ
λ, µ ∈ R .
ERON E ISABEL
20
x = λ
8. Plano x0y: z = 0 e y = µ . Plano x0z: y = 0 e
z = 0
x = λ
y = 0 . Plano y0z: x = 0 e
z = µ
x = 0
y = λ .
z = µ
9. (1, 2, 4) = ( −10, −5, 0 ) + (11, 7, 4 )
10. a) x − 2 y + 4 z + 1 = 0 ; b) 3 x − y + z − 4 = 0 ; c) 3 x − 2 y − 3 = 0 ; d) x + z − 2 = 0
11. a) 2 x − y − 3 z + 7 = 0 ; b) y − 2 z = 0
x = λ
x = λ
; b) y = 5λ − 1 ; c)
12. a) y = µ
z = 5 + 4λ + 2µ
z = µ
13. P = ( 6, 2, −1) . 14. π : 3 x − y − 3 z − 8 = 0
17. π : 2 x − y + z = 0
x = λ
y = µ ;
z = 3
x = λ
d) y = µ
, λ , µ ∈ R.
z = −2 + µ
15. π : 3 x − y − 3 z + 2 = 0 16. π : x − z + 2 = 0
18. π 1 : x + 4 y − 3 z = 0 , π 2 : 5 x + 9 y − 4 z = 0 , π 3 : 7 x + 6 y − 10 z = 0
19. X = ( 2,1, −1) + t ( 7 , −13,1)
20. X = t ( 9,17 ,7 ) .
17 7
17 9
21. P1 = ( 7,9, 0 ) , P2 = , 0, e P3 = 0, − ,
5
2 2
5
x = 1− t
x = t
5 4 5
7 4 1
23. y = 0
24. Não 25. a) P ' = , − , ; b) P ' = , , −
22. y = −2 + t
3 3 3
3 3 3
z = −1 + 2t
z = t
3 λ
x = 2 + 2 + µ
O lugar geométrico é o plano de equações α : y = µ
,
2
3 λ 3µ
z = 2 + 2 − 2
26.
27. π :16 x − 5 y − 38z − 47 = 0 .
28. α : 4 x + 3 = 0
30. d ( A, B ) = d ( A, C ) = 9 e d ( B, C ) = 5 10 .
32. a)
5
b)
2
21
(
(
38.
39.
2 1 5
8 4 4
r
29. v = − , , + , − ,
3 3 3 3
3 14
31. a) 69 b) ⋅
5
3
14
) (
) (
) (
) (
3 3
) (
) (
)
)
α : 2 − 2 x − 1 + 2 y + 1 + 2 z − 1 + 2 2 = 0
33. Os planos
β : 2 + 2 x + 2 −1 y + 1 − 2 z − 1 − 2 2 = 0
34. α = 0 . r // s coincidentes.
37.
λ, µ ∈ R .
35. α = arcsen
2
3
36. α = arccos
210
15
2 3+ 2 2 −3
2 3 − 2 −3 − 2
r : X = (1, 0 ,1) + t −
,
,
,
,
ou r ' : X = (1, 0 ,1) + t
3
3
3
3
3
3
π 1 : 2 x − 3 y + z − 5 = 0, π 2 : 3 x − y − 2 z − 4 = 0 .
8 19
19
y−2 z
40. a) AF: x =
=
2
−3
x = λ + µ
b) ABF: y = 2 + 2λ + µ
z = −3λ − µ
c) D ( −1, −2,3)
d) EFG : x + y − z − 2 = 0
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
21
REFERÊNCIAS BIBLIOGRÁFICAS
1. CAMARGO, Ivan de, BOULOS, Paulo. Geometria Analítica. 3ª ed. revisada e ampliada
– São Paulo: Prentice Hall, 2005.
2. STEINBRUCH, Alfredo, WINTERLE Paulo, Geometria Analítica, Makron Books.
3. CAROLI, Alésio, CALLIOLI Carlos A., FEITOSA Miguel O., Matrizes, Vetores e
Geometria Analítica, Ed. Nobel, 1991.
4. VENTURINI, Jacir J., Álgebra Vetorial e Geometria Analítica, 8ª edição (atualizada)
disponível no site www.geometriaanalítica.com.br .
5. SANTOS, Reginaldo. Um Curso de Geometria Analítica e Álgebra Linear, disponível no
site www.mat.ufmg.br/~regi .
6. LEHMANN, Charles H. Geometria Analítica, Editora Globo.
7. Apostilas Cálculo Vetorial – Professoras do Departamento de Matemática – UFBA
disponível no site www.dmat.ufba.br .
ÁLGEBRA VETORIAL E GEOMETRIA ANALÍTICA
ERON E ISABEL
22
Baixar