Merisandra Côrtes de Mattos
SISTEMA DIFUSO DE CONTROLE DA
ASSISTÊNCIA RESPIRATÓRIA EM
NEONATOS - SARE
Florianópolis – SC
2001
UNIVERSIDADE FEDERAL DE SANTA CATARINA
PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA DA
COMPUTAÇÃO
Merisandra Côrtes de Mattos
SISTEMA DIFUSO DE CONTROLE DA
ASSISTÊNCIA RESPIRATÓRIA EM
NEONATOS - SARE
Dissertação submetida à Universidade Federal de Santa Catarina como parte dos
requisitos para a obtenção do grau de Mestre em Ciência da Computação
Silvia Modesto Nassar, Dra.
Orientadora
Edson Carvalho de Souza, M.Sc.
Co-orientador
Florianópolis, novembro de 2001
ii
SISTEMA DIFUSO DE CONTROLE DA ASSISTÊNCIA
RESPIRATÓRIA EM NEONATOS - SARE
Merisandra Côrtes de Mattos
Esta Dissertação foi julgada adequada para a obtenção do título de Mestre em Ciência
da Computação Área de Concentração Sistemas de Conhecimento e aprovada em sua
forma final pelo Programa de Pós-Graduação em Ciência da Computação.
_____________________________________
Fernando Álvaro Ostuni Gauthier, Dr.
Coordenador do Curso
Banca Examinadora
_____________________________________
Silvia Modesto Nassar, Dra. (Orientadora)
_____________________________________
Edson Carvalho de Souza, M.Sc.(Co-orientador)
_____________________________________
Anita Maria da Rocha Fernandes, Dra.
_____________________________________
Luiz Fernando Jacintho Maia, Dr.
_____________________________________
Mauricio José Lopes Pereima, Dr.
_____________________________________
Rogério Cid Bastos, Dr.
iii
"O pensamento lógico pode levar você de A a B,
mas a imaginação te leva a qualquer parte do Universo."
(Albert Einstein)
iv
Dedico esta pesquisa aos meus pais
Libanio e Tereza Lenir,
que iluminam os meus caminhos
com afeto e dedicação.
v
AGRADECIMENTOS
A pesquisa de Mestrado é um processo que envolve várias pessoas. Agora chegou
o momento de agradecer-lhes pela colaboração e apoio durante esta etapa da minha
vida. Agradeço:
A Deus por me proteger e guiar os meus passos para os caminhos certos.
Aos meus pais Libanio e Tereza Lenir, pelo afeto e dedicação, eles que sempre
se doam por inteiro para que eu possa realizar os meus sonhos.
À minha irmã Maristane, pela amizade, companheirismo e palavras de incentivo.
Sempre agradeço por ter você como irmã.
Ao meu cunhado Paulo Fernando Strada, pela amizade e apoio na concepção
desta pesquisa, pois foi ele, como pediatra intensivista, que teve a idéia do domínio de
aplicação, ou seja, as alterações de parâmetros no ventilador mecânico.
Aos meus sobrinhos Gabriel e Rafael...meninos iluminados.
À Anita Maria da Rocha Fernandes, que conheci em 1997 como minha
professora de Engenharia de Software na graduação, pessoa especial que se tornou uma
querida amiga e incentivadora da realização deste Mestrado.
À Silvia Modesto Nassar, professora orientadora e grande amiga, que me ensinou
muito sobre amizade, ensino, aprender a aprender e me mostrou que existe dentro de
cada um capacidades muito superior a que se pensa ter e várias possibilidades.
Ao Edson Carvalho de Souza, professor co-orientador, pela paciência,
capacidade de aceitar desafios fuzzy e disponibilidade sempre que precisei.
vi
À Priscyla Waleska Targino de Azevedo Simões, minha colega, grande amiga,
uma irmã de alma, muito obrigada por todo o apoio e incentivo durante esta pesquisa e
em todos esses anos que nos conhecemos.
Aos professores Masanao Ohira, Rogério Cid Bastos, Luiz Fernando Jacintho
Maia, pelas colaborações para esta pesquisa.
Ao Maurício José Lopes Pereima e Maria Marlene de Souza Pires, pelo
carinho e amizade, conhecê-los foi um dos momentos especiais da minha existência.
Ao Renato Boeing, pela paciência e pelos exercícios de alongamento que me
ajudaram a suportar os dias anteriores a defesa.
À Ana Paula Soares Fernandes e Elizabeth Soares Fernandes, pela amizade.
Ao Departamento de Ciência da Computação da Universidade do Extremo
Sul Catarinense (UNESC), em especial ao Coordenador do Curso, professor Rogério
Antônio Casagrande, pela colaboração.
Aos meus alunos do curso de Ciência da Computação da UNESC, pelo apoio e
compreensão.
Aos meus amigos e colegas Augusto José Venâncio Neto, Jeferson Pistori,
Cristian Cechinel e Paulo João Martins pela amizade, incentivo e colaboração
durante o curso.
À Verinha e Val, pelo carinho e compreensão.
vii
RESUMO
Esta pesquisa mostra a aplicação dos conjuntos difusos no controle de processos
médicos, permitindo que sejam consideradas as imprecisões do raciocínio clínico
presentes nos dados. Aspectos esses evidenciados no Sistema Difuso de Controle da
Assistência Respiratória em Neonatos (SARE), cujo domínio de aplicação refere-se à
ventilação mecânica neonatal, tendo-se a informática como uma forma de contribuir
com a terapia intensiva pediátrica. O SARE é o protótipo de um sistema difuso de
controle dos parâmetros da assistência respiratória em neonatos (0 a 29 dias), com base
na gasometria arterial e na afecção respiratória apresentada pelo paciente. Procurando
auxiliar os médicos pediatras e os residentes que trabalham numa Unidade de Terapia
Intensiva. Possibilitando que o médico dedique a maior parte do seu tempo no efetivo
atendimento à criança criticamente enferma. O SARE foi desenvolvido no ambiente
Delphi 5.0, para trabalhar em plataforma Windows, disponibilizadas em PC’s. A
modelagem do sistema foi realizada por meio da teoria de conjuntos difusos, que
consiste numa contribuição às áreas da saúde e inteligência artificial, permitindo a
modelagem e tratamento da imprecisão adequadamente. O SARE foi avaliado de forma
qualitativa oferecendo satisfatoriamente as alterações de parâmetros a serem realizadas
no ventilador mecânico.
viii
ABSTRACT
This research shows the application of the fuzzy sets in the control of medical
processes, permitting the imprecision of clinical reasoning present in the data to be
considered. These aspects are evident in the Control Fuzzy System of the Respiratory
Assistance in New-born (SARE), in which the control of application refers to neonatal
mechanical ventilation, having computer science as a way to contribute to intensive
pediatric therapy. SARE is the prototype of control fuzzy system of the parameters in
respiratory assistance in neonates (0 to 29 days), with basses on arterial gas values and
on the respiratory affection presented by the patient. Seeking to help the pediatric
doctors and the intern doctors who work in an Intensive Care Unit. Making it possible
for the doctor to dedicate a greater part of his time to the effective attendance of the
critically ill child. SARE was developed in the environment Delphi 5.0, to work in
Windows platform, available in PC’s. The modeling of the system was done by means
of the fuzzy set theory, which consists of a contribution to the health field and artificial
intelligence, permitting the adequate modeling and treatment of imprecision. SARE was
qualitatively tested, offering satisfaction in the alterations of parameters that are to be
performed in the mechanical ventilator.
ix
SUMÁRIO
LISTA DE FIGURAS.................................................................................................... xi
LISTA DE GRÁFICOS ............................................................................................... xii
LISTA DE TABELAS ................................................................................................. xiii
LISTA DE SIGLAS ..................................................................................................... xiv
CAPÍTULO 1 INTRODUÇÃO ................................................................................... 15
1.1 Objetivos do Trabalho ........................................................................................... 17
1.1.1 Objetivo Geral ....................................................................................................... 17
1.1.2 Objetivos Específicos ............................................................................................ 17
1.2 Justificativa do Trabalho ....................................................................................... 18
1.3 Estrutura do Trabalho .......................................................................................... 19
CAPÍTULO 2 INTELIGÊNCIA ARTIFICIAL ........................................................ 21
2.1 Definições de Inteligência Artificial ..................................................................... 23
2.2 Abordagens da Inteligência Artificial.................................................................. 24
2.3 Principais Áreas da Inteligência Artificial .......................................................... 25
CAPÍTULO
3
CONHECIMENTO:
FORMAS
DE
RACIOCÍNIO
E
REPRESENTAÇÃO .................................................................................................... 27
3.1 Raciocínio Plausível................................................................................................ 27
3.2 Raciocínio Difuso .................................................................................................... 30
3.3 Raciocínio Qualitativo............................................................................................ 31
3.4 Raciocínio Probabilístico ....................................................................................... 31
3.5 Representação do Conhecimento .......................................................................... 32
CAPÍTULO 4 SISTEMAS ESPECIALISTAS .......................................................... 35
4.1 Componentes de um Sistema Especialista............................................................ 36
4.2 Aplicações de Sistemas Especialistas .................................................................... 38
CAPÍTULO 5 INTELIGÊNCIA ARTIFICIAL MÉDICA ...................................... 41
5.1 Histórico da Evolução da Inteligência Artificial Médica .................................... 42
5.2 Sistemas Inteligentes Desenvolvidos na Área Médica......................................... 44
5.3 Exemplos de Sistemas Desenvolvidos na Área de Ventilação Mecânica ........... 51
CAPÍTULO 6 CONJUNTOS DIFUSOS ................................................................... 54
6.1 Conceitos Gerais .................................................................................................... 55
6.2 Operações com Conjuntos Difusos....................................................................... 60
x
6.3 Variáveis Lingüísticas ............................................................................................ 61
6.4 Etapas de Implementação de um Sistema Difuso................................................ 62
6.5 Sistema Difuso de Controle.................................................................................... 65
6.6 Algumas Ferramentas para Desenvolvimento de Sistemas Difusos .................. 67
CAPÍTULO 7 DOMÍNIO DE APLICAÇÃO ............................................................ 70
7.1 A Mecânica Respiratória ....................................................................................... 70
7.2 Assistência Respiratória......................................................................................... 71
7.2.1 Histórico da Ventilação Pulmonar Mecânica ....................................................... 72
7.2.2 Tipos e Classificação de Ventiladores Mecânicos ................................................ 73
7.2.3 O Ventilador Mecânico ........................................................................................ 74
7.2.4 Causas de Falência Respiratória e Indicações para Ventilação............................ 77
7.3 Gasometria Arterial .............................................................................................. 78
7.4 Distúrbios Respiratórios em Neonatos ................................................................. 79
CAPÍTULO 8 DESENVOLVIMENTO DE UM SISTEMA DIFUSO DE
CONTROLE DA ASSISTÊNCIA RESPIRATÓRIA EM NEONATOS ................ 81
8.1 Aquisição do Conhecimento .................................................................................. 82
8.2 Modelagem Difusa do Problema ........................................................................... 83
8.2.1 Fuzificação das Variáveis...................................................................................... 83
8.2.1.1 Funções de Pertinência da pO2 ......................................................................... 84
8.2.1.2 Funções de Pertinência da pCO2 ...................................................................... 87
8.2.2 Inferência Fuzzy..................................................................................................... 89
8.2.3 Defuzificação......................................................................................................... 92
8.2.3.1 Funções de Pertinência da FiO2 ....................................................................... 93
8.2.3.2 Defuzificação pelo Método do Centro de Gravidade........................................ 97
8.3 Desenvolvimento do SARE .................................................................................. 101
8.4 Avaliação do SARE .............................................................................................. 105
CAPÍTULO 9 - CONCLUSÕES ............................................................................... 106
9.1 Trabalhos Futuros ................................................................................................ 107
BIBLIOGRAFIA ........................................................................................................ 108
GLOSSÁRIO .............................................................................................................. 115
APÊNDICE I BASE DE REGRAS DO SARE ........................................................ 116
xi
LISTA DE FIGURAS
Figura 1 - O processo indutivo do raciocínio plausível (LINARES, 1997). ................. 28
Figura 2 - O processo de generalização do raciocínio plausível (LINARES, 1997)...... 29
Figura 3 - O processo de analogia do raciocínio plausível (LINARES, 1997). ............. 29
Figura 4 - Componentes de um sistema especialista (RABUSKE, 1997)...................... 36
Figura 5 - Estrutura funcional do simulador (CAJACURI, 1997) ................................. 52
Figura 6 - Características da função de pertinência........................................................ 58
Figura 7 - Intersecção entre conjuntos difusos ............................................................... 60
Figura 8 - União entre conjuntos difusos ....................................................................... 60
Figura 9 - Complemento de um conjunto difuso............................................................ 61
Figura 10 - Estrutura básica de um sistema difuso (LEE, 1990)................................... 63
Figura 11 - Defuzificação pelo método do centro de gravidade..................................... 64
Figura 12 - Estrutura básica de um controlador difuso (LEE, 1990). ............................ 67
Figura 13 - Tela principal do FuzzyCLIPS .................................................................... 68
Figura 14 - Interface da ToolBox Fuzzy do MATLAB................................................. 69
Figura 15 - Janela principal do UNFUZZY.................................................................... 69
Figura 16 - As fases do ciclo respiratório (DUPUIS, 1986)........................................... 75
Figura 17 - Painel frontal do respirador neonatal e pediátrico Inter3 (INTERMED) .... 77
Figura 18 - Etapas da implementação de um sistema fuzzy............................................ 81
Figura 19 - Tela dos dados pessoais ............................................................................. 102
Figura 20 - Tela do SARE de informações sobre a gasometria ................................... 103
Figura 21 - Valores atuais no ventilador mecânico ...................................................... 104
Figura 22 - Tela de sugestões das alterações no ventilador mecânico ......................... 105
xii
LISTA DE GRÁFICOS
Gráfico 1 - Funções de pertinência da pO2 ................................................................... 86
Gráfico 2 - Funções de pertinência do PCO2.................................................................. 89
Gráfico 3 - Intersecção fuzzy - regra 5............................................................................ 91
Gráfico 4 - Intersecção fuzzy - regra 8........................................................................... 92
Gráfico 5 - Funções de pertinência da FiO2 .................................................................. 95
Gráfico 6 - Funções de pertinência do TI ...................................................................... 95
Gráfico 7 - Funções de pertinência da PIP .................................................................... 96
Gráfico 8 - Funções de pertinência da FR ...................................................................... 96
Gráfico 9 - Funções de pertinência da PEEP.................................................................. 96
xiii
LISTA DE TABELAS
Tabela 1 - Variáveis lingüísticas e seus valores ............................................................. 62
Tabela 2 - Cálculo da t-norma - regra 5 ......................................................................... 90
Tabela 3 - Cálculo da t-norma – regra 8......................................................................... 92
xiv
LISTA DE SIGLAS
FiO2 – Fração de Oxigênio
FR – Freqüência Respiratória
IA – Inteligência Artificial
IAM – Inteligência Artificial Médica
pCO2 – Pressão Parcial de Dióxido de Carbono
PEEP – Pressão Positiva no Final da expiração
pH – Íon Hidrogênio
PIP – Pressão Inspiratória
pO2 – Pressão Parcial de Oxigênio
SARE – Sistema Difuso de Controle da Assistência Respiratória em Neonatos
SE – Sistema Especialista
TE – Tempo Expiratório
TI – Tempo Inspiratório
UTI – Unidade de Tratamento Intensivo
VM – Ventilação Mecânica
CAPÍTULO 1
INTRODUÇÃO
Muitos progressos foram realizados na construção de sistemas especialistas, desde
a época em que os primeiros trabalhos foram desenvolvidos, na segunda metade da
década de 60. Assim, os sistemas de apoio à decisão e controle têm sido bastante
utilizados, devido ao avanço tecnológico que, associado aos novos conceitos de
inteligência artificial, propiciam a elaboração de sistemas inteligentes e eficientes
(RICH & KNIGHT, 1993).
Uma das principais áreas de aplicação dos sistemas especialistas é a Medicina,
tendo seu início na década de 70, época em que foram desenvolvidos vários sistemas de
apoio à decisão médica de diferentes complexidades. Esses programas incluem aspectos
importantes ao longo da atividade do médico como o diagnóstico, prognóstico e
planejamento terapêutico que estão relacionados com a medicina clínica.
A introdução da informática na saúde se deve a uma necessidade de ordem
clínica, administrativa ou de pesquisa. Essas necessidades levam a decisão de adquirir
ou desenvolver um sistema computacional impulsionado pelas melhorias que este pode
proporcionar, como aumentar a qualidade, baixar o custo, disponibilizar acesso as
informações a fim de evoluir o processo de cuidados com a saúde (SOUZA, 1999).
Em sistemas especialistas uns dos maiores problemas é o tratamento de dados
com incerteza, ou seja, como chegar a uma decisão quando não se tem disponível todas
as informações necessárias. Procedimento esse bastante comum na área médica, já que
as informações fornecidas pelo paciente e os testes laboratoriais podem apresentar
incerteza, além do próprio raciocínio clínico. Portanto, processar essas informações para
se chegar ao diagnóstico e a terapia a ser adotada fazem parte do dia-a-dia do médico.
16
Para que seja possível representar esse conhecimento com incerteza, tem-se quatro
linhas matemáticas de estudo, as quais são: o Modelo Lógico; a Teoria de DempsterShafer; o Modelo Probabilístico e o Modelo Lingüístico baseado no raciocínio difuso.
Os sistemas que se baseiam no modelo lingüístico para representar o
conhecimento com imprecisão são os que utilizam uma série de regras condicionais
difusas derivadas da base de conhecimento especialista, expressando as imprecisões e
aproximações dos métodos de decisão dos especialistas, ou seja, esses sistemas fazem
uso dos conjuntos difusos que são capazes de capturar informações vagas, descritas em
geral numa linguagem natural e convertê-las para um formato numérico de fácil
manipulação pelos computadores, suportando os modos de raciocínio que são
aproximados ao invés de exatos (WANG, 1997).
Nesse âmbito, tem-se os sistemas difusos de controle que utilizam a abordagem de
conjuntos difusos para programar e controlar processos, proporcionando um algoritmo
que pode converter a estratégia de controle lingüístico, baseado no conhecimento de um
especialista, em uma estratégia de controle automática, tornando a operação de um
processo mais eficiente e confortável para tarefas que envolvam temperatura,
velocidade, fluxo, pressão e outros; adaptando-se à solução de problemas complexos
que envolvam o pensamento intuitivo ou descritivo humano (LEE, 1990). Isto os torna
ideais para aplicações médicas, onde o raciocínio é impreciso e muitas vezes intuitivo,
além desses sistemas propiciarem uma menor dependência de pessoal específico.
Portanto, por meio da informática, que vem facilitando diariamente a vida das
pessoas, este trabalho propõe o desenvolvimento de um sistema difuso de controle na
área de alterações de parâmetros em ventilação mecânica para afecções respiratórias em
neonatos. Seu objetivo é fornecer aos médicos da Unidade de Tratamento Intensivo
Pediátrica (UTI) uma ferramenta de apoio à tomada de decisão no que diz respeito aos
parâmetros a serem modificados no ventilador mecânico, além de estabelecer
procedimentos adequados por meio dos quais a complexidade e dificuldades inerentes a
esse problema possam ser ultrapassadas pelo uso de novas tecnologias. Possibilitando
que o médico dedique a maior parte de seu tempo no efetivo atendimento à criança
17
criticamente enferma, ao invés de controlar o equipamento, podendo assim fornecer um
melhor suporte no atendimento a essas crianças.
Atualmente, há uma grande interação entre a informática e a área médica,
aplicações como esta, quando desenvolvidas utilizando técnicas de inteligência artificial
podem propiciar um grande benefício àquela área, pois o conhecimento de especialistas
é disponibilizado em programas computacionais que podem ser acessados por
faculdades, instituições e outros profissionais de saúde.
1.1 Objetivos do Trabalho
1.1.1 Objetivo Geral
Desenvolver o protótipo de um sistema especialista difuso de controle dos
parâmetros da ventilação mecânica neonatal, SARE, com base na gasometria arterial e
na afecção respiratória apresentada pelo paciente.
1.1.2 Objetivos Específicos
Este trabalho volta-se a aplicação da informática na Medicina, mais precisamente
de sistemas de controle difuso em atividades médicas, a fim de auxiliar os profissionais
de saúde e contribuir com a terapia intensiva pediátrica.
Dentre os objetivos específicos, visa-se:
a) mostrar a adequação do uso de conjuntos difusos no controle de processos
aplicados à medicina;
b) aplicar a função S para fuzificação das variáveis;
c) aplicar o método do centro de gravidade para defuzificação das variáveis;
d) desenvolver o protótipo do SARE.
18
1.2 Justificativa do Trabalho
Dentre as medidas terapêuticas utilizadas em Unidades de Tratamento Intensivo,
uma das que mais desperta interesse é a assistência ventilatória, por realizar
momentaneamente a mecânica respiratória, mas também por ser um dos maiores
avanços da medicina intensiva nos últimos anos, sendo seguro, eficaz e um
procedimento rotineiro em UTI (PIVA et al, 1997).
A ventilação mecânica é uma prática recente que ganhou impulso nos últimos 30
anos. Sendo que na década de 80, intensificaram-se os estudos sobre o tema e
numerosos avanços foram atingidos, tornando-a uma prática muito mais eficiente e
fisiológica além de facilitar o retorno do paciente à ventilação espontânea (BORGES et
al, 1999).
Os resultados cada vez mais satisfatórios obtidos com a ventilação mecânica
devem ser creditados a no mínimo três importantes fatores: (i) melhor conhecimento das
alterações fisiopatológicas da insuficiência respiratória e suas inter-relações com as
variáveis dos respiradores; (ii) o desenvolvimento de equipamentos cada vez mais
adequados para tais condições; (iii) aprimoramento na técnica de manutenção e suporte
dos pacientes quando em ventilação mecânica (PIVA et al, 1997). Este último fator,
justifica a realização desse trabalho, pois o uso da informática, especialmente das
técnicas de inteligência artificial, podem possibilitar ganhos de informação, melhora do
desempenho e atendimento ao paciente. Dessa forma, a Medicina pode ter na
informática uma forte aliada, no sentido de promover uma melhoria no atendimento e
suporte a pacientes.
Qualquer método novo voltado à saúde, por exemplo, os que envolvem o uso da
informática, devem apresentar como maior vantagem a capacidade de levar o médico à
beira do leito, fazendo com que se dê uma maior atenção e assistência ao paciente
(PIVA et al, 1997).
19
Trabalhos que, como este, refere-se a controle difuso têm sido de vasto interesse e
estudo nas mais diversas instituições e centros de pesquisas, sendo esse um domínio de
grande sucesso na utilização de conjuntos difusos. Obtendo-se também resultados
bastante animadores na aplicação de conjuntos difusos no desenvolvimento de
aplicações baseadas em conhecimento, já que essa teoria possibilita a modelagem e
tratamento da imprecisão de forma adequada.
Por outro lado, a partir desta pesquisa poderá ser desenvolvido um controlador
difuso, para ser adaptado ao ventilador mecânico, o que efetivamente poderia
proporcionar um melhor suporte de equipamento e, portanto, liberar os profissionais
intensivistas para o atendimento de crianças criticamente enfermas.
1.3 Estrutura do Trabalho
O trabalho está estruturado em nove capítulos. No primeiro é apresentado o
problema a ser estudado, especificando os objetivos e justificando a importância da
realização do mesmo.
O segundo capítulo enfoca a inteligência artificial, suas definições e principais
áreas. O terceiro capítulo descreve o conhecimento, nas várias formas de raciocínio e de
representação.
No quarto capítulo define-se sistemas especialistas, seus principais componentes
e suas aplicações. O quinto capítulo é um estudo realizado sobre inteligência artificial
médica, comentando-se sobre diferentes pesquisas desenvolvidas na área coincidente
com a da pesquisa aqui apresentada.
No sexto capítulo o enfoque é sobre conjuntos difusos, incluindo as etapas de
implementação de um sistema difuso, definições referentes a sistemas difusos de
controle e algumas ferramentas disponíveis no mercado. Os conceitos referentes a esse
capítulo serão explorados na realização deste trabalho.
20
No sétimo capítulo descreve-se o domínio de aplicação do trabalho, iniciando-se
com conceitos sobre a mecânica respiratória e posteriormente é abordada a assistência
respiratória.
O oitavo capítulo descreve o desenvolvimento do SARE, as etapas do
desenvolvimento de um sistema difuso em ambiente de programação e os resultados
obtidos por meio da abordagem difusa.
No capítulo 9 tem-se as conclusões e alguns trabalhos futuros que poderão ser
desenvolvidos a partir desta pesquisa na área de sistemas difusos aplicados à Medicina.
CAPÍTULO 2
INTELIGÊNCIA ARTIFICIAL
A inteligência artificial (IA) é um ramo da ciência da computação ao mesmo
tempo recente, já que oficialmente nasceu em 1956, e muito antigo, pois foi construída a
partir de idéias filosóficas, científicas e tecnológicas herdadas de outras ciências,
algumas tão antigas quanto a Lógica (BITTENCOURT, 2001). Assim, tem-se há muito
tempo buscado explicitar o raciocínio humano e modelá-lo da melhor maneira possível.
No decorrer da história, muitos cientistas e filósofos dedicaram-se as análises da
inteligência humana, estudo esse que iniciou no campo da Filosofia e posteriormente
passou a ser estudado de forma científica pela Psicologia, Pedagogia, Ciência Cognitiva,
Engenharia, Neurologia, Lingüística e Computação, entre outros, visando aspectos
práticos e comerciais (GANASCIA, 1993).
A inteligência artificial destaca-se na busca pela compreensão da inteligência,
reunindo vários campos do conhecimento com o propósito prático de simular a
inteligência. Sendo utilizada a fim de expandir a capacidade de inteligência humana e
até mesmo a substituir em algumas funções, o que em parte tornou-se possível devido
ao desenvolvimento dos sistemas especialistas e dos conjuntos difusos (GANASCIA,
1993).
A fim de se compreender a inteligência
necessário anteriormente definir o que é
Assim, a seguir, apresenta-se um conjunto de
vários autores, cuja maioria referencia-se
humano (RABUSKE, 1995):
artificial é
inteligência.
definições de
ao raciocínio
• Binet: “Inteligência é julgar, compreender bem, raciocinar bem”.
22
• Tearman: “A capacidade de conceituar e de compreender o seu significado”.
• Vernon: “Capacidade geral de pensamento” ou “eficiência mental”.
• Burt: “Habilidade inata, geral e cognitiva”.
• Helm: “A atividade inteligente consiste na compreensão do essencial de uma
situação e numa resposta reflexa apropriada”.
• Wechsler: “A capacidade agregada ou global de um indivíduo agir com
propósito de pensar racionalmente, e de se adaptar eficientemente ao
ambiente”.
• Piaget: “Adaptação ao ambiente físico e social”.
Inúmeras pesquisas estão sendo realizadas com relação a
inteligência, como resultado sabe-se que é a combinação
harmoniosa de diversas habilidades, tais como, a memória,
motivação e capacidade de suportar esforços mentais. Na
realidade, a inteligência é uma abstração feita com base em
certos comportamentos, a partir dos quais pode-se deduzir
inteligência. Aspecto este que é de fundamental importância
para a computação, pois se observa o comportamento do
sistema que resolve problemas e faz inferências (RABUSKE,
1995).
Deve-se destacar que a inteligência artificial permite
que as máquinas possam realizar tarefas complexas no lugar
do ser humano, liberando-o assim de atividades enfadonhas
ou que de certa forma sejam inseguras, possibilitando
também uma maior interação das pessoas com equipamentos que
sejam sofisticados. Além disso, a inteligência artificial
permite que o conhecimento seja compartilhado pelas
pessoas, não havendo a necessidade de permanentes consultas
a especialistas (NASCIMENTO JR & YONEYAMA, 2000).
23
2.1 Definições de Inteligência Artificial
Segundo RABUSKE (1995), existe muita discussão em busca
de uma definição ideal para inteligência artificial, sendo
que algumas das definições correntes estão reproduzidas a
seguir:
• “ Inteligência
artificial
é
a
parte
da
Ciência
da
Computação que compreende o projeto de sistemas
computacionais que exibam características associadas,
quando
presentes
no
comportamento
inteligência” (BARR & FEIGENBAUM, 1981).
humano,
a
• “ Inteligência artificial é o estudo de conceitos que
permitem
aos
computadores
(WINSTON, 1984).
• “ Inteligência
serem
inteligentes”
artificial é o estudo das faculdades
mentais
com
o
uso
de
modelos
(CHARNIAK & McDERMOTT, 1985).
computacionais”
• “ Inteligência artificial é o estudo de como fazer os
computadores realizarem coisas que, no momento,
pessoas fazem melhor” (RICH & KNIGHT, 1993).
as
Analisando-se as definições citadas, pode-se dizer que inteligência artificial é o
resultado da aplicação de técnicas e recursos, principalmente de ordem não-numérica o
que viabiliza a solução de problemas que exijam dos seres humanos um determinado
grau de raciocínio e perícia. Dessa forma, a inteligência artificial caracteriza-se como
uma nova era da computação, ou seja, a do processamento não-numérico (RABUSKE,
1995).
24
2.2 Abordagens da Inteligência Artificial
Em inteligência artificial existem três correntes de pensamento denominadas de
abordagem simbólica, conexionista e evolucionária (BITTENCOURT, 2001).
Na inteligência artificial simbólica o comportamento inteligente é simulado com
base nos princípios da Psicologia Cognitiva. Devendo essa abordagem ser utilizada
quando se tem o domínio do problema bem definido, sabe-se como resolvê-lo e como
encontrar a sua solução.
Segundo BARRETO (1997), programas de jogar xadrez, diagnósticos e
monitorização, entre outros, são produtos resultantes da abordagem simbólica. Fazendo
uso de ferramentas como lógica, regras SE-ENTÃO e técnicas de aquisição de
conhecimento de especialistas.
A inteligência artificial conexionista visa investigar a possibilidade de simulação
de comportamentos inteligentes por meio de modelos baseados na estrutura e
funcionamento do cérebro humano, apresentando um desempenho melhor quando o
problema não é bem definido, ou seja, quando não se sabe explicitamente como realizar
a tarefa (BITTENCOURT, 2001).
A abordagem evolucionária é baseada nos mecanismos evolutivos encontrados na
natureza, como a auto-organização e o comportamento adaptativo, tendo-se os
algoritmos genéticos como uma das áreas de aplicação do conceito evolucionário
(BITTENCOURT, 2001).
25
2.3 Principais Áreas da Inteligência Artificial
Existem muitos campos de estudo que compreendem o desenvolvimento da
inteligência artificial, porém sendo uma ciência relativamente nova ainda há muito que
ser explorada, assim nos próximos anos novas áreas de pesquisa e aplicações devem
surgir.
As aplicações da inteligência artificial são todas importantes para a computação,
mas segundo (RABUSKE, 1995), algumas se destacam devido a vários fatores, como os
esforços dedicados ao seu desenvolvimento ou pela importância que a aplicação
assume. Assim, pode-se destacar:
• Sistemas especialistas: sistemas que fornecem conclusões sobre assuntos
especializados, a principal aplicação desses sistemas é na área médica. São
também aplicados nas demais áreas de conhecimento como na Matemática,
Química e Engenharia, entre outros.
• Processamento de linguagem natural: visa aperfeiçoar a comunicação entre
as pessoas e os computadores, voltando-se, portanto a construção de programas
que possam compreender a linguagem natural e gerar textos.
• Reconhecimento de padrões: essa capacidade possibilita ao programa
reconhecer, por exemplo, a fala em linguagem natural, os caracteres digitados e
a escrita.
• Robótica: volta-se ao desenvolvimento de métodos de construção de máquinas
que possam interagir com o meio, ou seja, ver, ouvir e reagir a estímulos
sensoriais. Sendo utilizados na execução de atividades em ambientes hostis aos
humanos, como em viagens espaciais e na prospecção de petróleo.
• Bases de dados inteligentes: se uma base de conhecimento capaz de fazer
raciocínios e produzir resultados difíceis de serem conseguidos de outra forma,
26
for associada ao DBMS (Database Management System), tem-se uma base de
dados inteligente. Possibilitando aumento de produtividade e funcionalidade
dos sistemas computacionais.
• Prova de teoremas: é uma aplicação Matemática, mas que é interessante como
metodologia de solução de problemas. Requer habilidade de levantar hipótese e
perícia intuitiva na busca de resultados que foram provados anteriormente,
auxiliando assim a prova do teorema principal.
• Jogos: a ciência encontrou nos jogos um campo propício para testes da teoria,
tornando-se interessantes para a exploração da inteligência da máquina, porque
eles constituem uma tarefa estruturada, sendo fácil medir o sucesso ou
fracasso.
• Raciocínio Baseado em Casos: busca a solução para uma situação atual
baseando-se em casos semelhantes que aconteceram anteriormente.
A pesquisa realizada nesta dissertação focaliza-se na área de sistemas
especialistas, constituindo-se no desenvolvimento de um sistema especialista difuso
aplicado à área médica.
CAPÍTULO 3
CONHECIMENTO: FORMAS DE RACIOCÍNIO E
REPRESENTAÇÃO
O raciocínio é a capacidade humana de chegar a conclusões, partindo-se de
conhecimentos ou informações sobre um problema. Existem algumas formas de
raciocínio, que possibilitam a visualização de como as informações que apresentam
incerteza e imprecisão são tratadas. Informações essas que constituem a base do
processo de raciocínio.
Na resolução de problemas, percebe-se que as pessoas não utilizam apenas uma
forma de raciocínio, usam-se várias formas simultaneamente ou uma após a outra,
conforme o problema a ser resolvido (LINARES, 1997). A seguir, são apresentadas as
formas de raciocínio, para que dentre elas se possa escolher a melhor para modelar o
problema em questão.
3.1 Raciocínio Plausível
O raciocínio plausível é o modo de se chegar a uma conclusão, partindo-se do
conhecimento de evidências sobre o fato que se está analisando.
Esse tipo de raciocínio consiste de conjecturas, pressentimentos e suposições;
apresenta controvérsias; é transitório; envolve o aprendizado de algo novo sobre o
mundo, sendo portanto de interesse no dia a dia; seus padrões são claros (POLYA,
1990).
O objetivo principal do raciocínio plausível é distinguir uma suposição de outra,
ou seja, uma suposição mais razoável de outra menos razoável, constituindo-se numa
28
habilidade prática que proporciona a aprendizagem por imitação e método (LINARES,
1997).
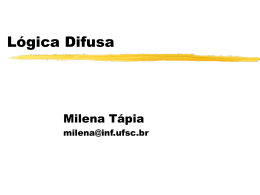
O raciocínio plausível envolve processos como (LINARES, 1997):
• Experiência: conhecimento pela observação, que altera o comportamento.
• Indução: inicia-se com a observação, levando ao raciocínio que possibilita
uma conclusão genérica do fato observado (Figura 1).
FATO
OBSERVAÇÃO
EXPERIÊNCIA
CONHECIMENTO
CONCLUSÃO GENÉRICA
Figura 1 - O processo indutivo do raciocínio plausível (LINARES, 1997).
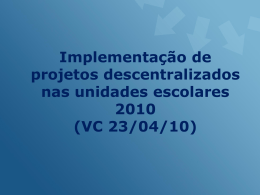
• Generalização: é passar de um conjunto de objetos para outro conjunto maior,
mas que contém o anterior. Por exemplo, um médico generaliza quando passa
dos sintomas para uma doença que contenha esses sintomas (Figura 2).
• Especialização: é passar de um conjunto de objetos a um conjunto menor que
esteja contido no anterior. Por exemplo, um médico realiza esse processo
quando ele passa dos sintomas das doenças respiratórias aos sintomas
específicos que caracterizam cada doença desse tipo.
29
SINTOMAS
OBSERVAÇÃO
EXPERIÊNCIA
CONHECIMENTOS BÁSICOS
GENERALIZAÇÃO
Figura 2 - O processo de generalização do raciocínio plausível (LINARES, 1997).
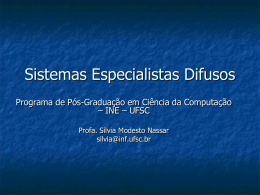
• Analogia: quando se observa um fato novo que é similar a outro já conhecido e
se tem uma opinião, então se pode ter uma opinião sobre o novo fato baseado
na experiência adquirida anteriormente (Figura 3).
FATO
OBSERVAÇÃO
INFORMAÇÃO BASEADA NA
EXPERIÊNCIA
EXPERIÊNCIA ADQUIRIDA
ANTERIORMENTE
CONHECIMENTO
CONCLUSÃO POR ANALOGIA
Figura 3 - O processo de analogia do raciocínio plausível (LINARES, 1997).
O raciocínio médico para tomada de decisão, por exemplo, é um raciocínio
plausível, pois se baseia em evidências que levam a conjecturas, o diagnóstico,
percorrendo processos desde a indução (médico iniciante) até a analogia (médico
especialista).
30
3.2 Raciocínio Difuso
O raciocínio difuso foi formalizado após a publicação do artigo “Fuzzy Sets” de
Lofthi Zadeh no anos 60, quando criou a Teoria dos Conjuntos Difusos. Teoria que foi
originada pelas discussões das diferenças entre os conceitos de imprecisão e incerteza,
que na época eram tratados da mesma forma.
A imprecisão da linguagem natural é uma conseqüência lógica da necessidade de
expressar informação de forma resumida (ZADEH, 1978).
Segundo DUBOIS & PRADE (1980), “aproximar” é equivalente a raciocínio
difuso e representa os processos pelos quais uma conclusão imprecisa é deduzida a
partir de premissas imprecisas. Esse raciocínio é mais de natureza qualitativa do que
quantitativa, portanto está fora da aplicabilidade da lógica clássica.
Assim, o raciocínio difuso pode ser definido como uma forma de raciocínio que se
baseia em dados imprecisos que são representados por graus de pertinência a um
conjunto difuso, levando a uma conclusão e sendo caracterizado por distribuições de
possibilidade.
No raciocínio difuso trabalha-se com funções de
pertinência, grau de pertinência, variáveis lingüísticas,
domínio e universo de discurso; envolvendo processos como
de fuzificação e defuzificação. Conceitos estes que serão
abordados no Capítulo VI, já que no desenvolvimento dessa
pesquisa a modelagem do raciocínio foi realizada pela forma
difusa.
31
3.3 Raciocínio Qualitativo
O raciocínio qualitativo baseia-se em informações qualitativas para chegar a uma
conclusão, envolvendo os valores que podem ser adotados pelas variáveis no espaço
quantitativo, e o tempo qualitativo ou tempo no qual os valores qualitativos são válidos
(BARRETO, 1990).
Esta forma de raciocínio é útil para a modelagem de sistemas quando não se tem
informação completa. A representação qualitativa da informação, não é conveniente,
por exemplo, para ser aplicada às informações médicas, pois apresenta mudanças
abruptas, o que não acontece na Medicina. No entanto, os conjuntos difusos
possibilitam uma transição menos abrupta, representando melhor alguns conceitos
médicos (LINARES, 1997).
3.4 Raciocínio Probabilístico
O raciocínio probabilístico se apóia em informações probabilísticas sobre fatos de
um domínio, chegando a uma conclusão sobre um novo caso. Sendo proveitoso para
modelar sistemas onde há informações que apresentam incerteza, por aleatoriedade que
conduz a um vetor de probabilidades.
A base de conhecimento de sistemas que utilizam o raciocínio probabilístico deve
ser representada como uma Rede Bayesiana, possuindo informações verossímeis,
relevantes e com relações causais. As redes Bayesianas são estruturas gráficas que
representam sistemas baseados em conhecimento, sendo composta por duas partes, uma
qualitativa e outra quantitativa.
Apesar das probabilidades serem expressas em números, a sua vantagem consiste
em proporcionar um meio para articular e manipular relações qualitativas, que segundo
PEARL (1988) são consideradas primitivas básicas, as quais são:
32
• Verossimilhança: as decisões dependem dessa relação qualitativa para
considerar os resultados da aplicação de uma regra ou adquirir mais
informações.
• Condicional: Thomas Bayes fez sua contribuição à teoria da probabilidade pela
associação da frase “...dado que se conhece C” com o teorema de Bayes, que é
um método quantitativo para a revisão de probabilidades conhecidas, com base
em nova informação amostral, sendo fundamental para se analisar um conjunto
de informações disponíveis e se chegar a uma conclusão objetiva, expressa
numericamente (KOEHLER, 1998).
• Relevância: relação que demonstra uma mudança potencial de crença
decorrente de uma alteração no conhecimento, podendo ser definida em termos
de verossimilhança e condicional.
• Causal: analisa-se estruturas de relações relevantes, com o objetivo de separar o
relevante do supérfluo, identificando-se a causa direta de um evento.
Num domínio de aplicação podem existir mais de uma forma de raciocínio, assim
num sistema computacional deve-se buscar a representação de conhecimento mais
adequada.
3.5 Representação do Conhecimento
Quando se pretende uma ação inteligente, deve-se analisar aspectos relacionados à
aquisição e desenvolvimento da inteligência, sendo o conhecimento que possibilita o
seu encadeamento e desenvolvimento (RICH & KNIGHT, 1993).
Segundo RABUSKE (1995) trabalhar com conhecimento é uma tarefa
complicada, principalmente quando se dispõe de mecanismos artificiais, como os
33
computadores. Assim, a manipulação do conhecimento exige formas de representação e
o entendimento de como ele é estruturado.
O conhecimento, conforme FISCHLER & FIRSCHEIN (1986), “pode ser
definido como a informação armazenada, ou os modelos usados pela pessoa ou
máquina para interpretar, predizer e responder apropriadamente ao mundo exterior”.
Conceito este que contempla as idéias computacionais relacionadas a representação de
conhecimento.
Para a estruturação do conhecimento num sistema computacional, utiliza-se a
representação do conhecimento, que segundo RICH & KNIGHT (1993) apresenta as
seguintes características:
• é generalizável, necessitando-se de vários pontos de vista do mesmo
conhecimento para ser atribuído a diferentes situações e interpretações;
• como o conhecimento está em constante mudança, a sua representação deve
possibilitar atualização e correção;
• deve ser robusta, permitindo a sua utilização mesmo quando todas as possíveis
situações não são abordadas;
• deve ser compreensível ao ser humano, permitindo a sua interpretação para
avaliação do estado de conhecimento do sistema.
A representação do conhecimento é realizada por meio dos métodos de IA que
modelam o conhecimento para organizarem a informação exigida, visando que o
programa possa acessá-lo para solucionar os problemas.
34
Segundo RICH & KNIGHT (1993), existem vários métodos de representação do
conhecimento, dentre os quais:
• Conhecimento
procedural:
representação
em
forma
de
funções/procedimentos.
• Lógica: modo de declaração que representa o conhecimento, empregando a
lógica proposicional e a de predicados.
• Árvores de decisão: organiza-se os conceitos em forma de árvores.
• Redes semânticas: o conhecimento é modelado por um conjunto de nós que
representam um objeto, situações ou conceitos, que são ligados por meio de
arcos que exprimem as relações entre estes elementos.
• Frames: são estruturas semelhantes as redes semânticas, sendo que cada nó
representa conceitos e/ou situações, possuindo propriedades que podem ser
especificadas ou herdadas por padrão.
• Casos: utiliza experiência passada, reunindo casos e procurando descobrir por
similaridade soluções para outros problemas.
• Processamento paralelo distribuído: utiliza modelos conexionistas.
• Esquemas híbridos: emprega a combinação de diferentes esquemas de
representação do conhecimento.
No trabalho desenvolvido, o conhecimento foi representado por meio da teoria
de conjuntos difusos, utilizando-se regras SE-ENTÃO.
CAPÍTULO 4
SISTEMAS ESPECIALISTAS
Os sistemas especialistas são aqueles que resolvem problemas de forma bastante
semelhante a do especialista humano, esses sistemas possuem um conhecimento
específico profundo sobre campos restritos do conhecimento (RABUSKE, 1995).
Esses sistemas caracterizam-se por um conhecimento poderoso e amplo, o que
torna o armazenamento da informação de extrema importância. Também os sistemas
especialistas devem explicar o que realizam e qual a finalidade. Constituindo-se assim,
em importantes ferramentas de treinamento.
Segundo SABBATINI (1993), os sistemas especialistas possuem algumas
facilidades que aumentam a sua flexibilidade e eficiência como: (i) possibilidade para
construção de regras; (ii) tomada lógica de decisões mediante ausência ou imprecisão de
informações; (iii) podem recuperar novos fatos e regras, utilizando-os sem modificar a
estratégia de busca.
Conforme MAUS (1991), um sistema especialista que reúne o conhecimento de
um ou mais especialistas humanos, tem sua essência mais aparente se alguns atributos
básicos se fizerem presentes: (i) o sistema tem separado o conhecimento específico do
especialista e a metodologia de solução de problemas; (ii) a transferência interativa de
conhecimento pode minimizar o tempo necessário para transferir o conhecimento do
especialista para uma base de conhecimento; (iii) a estratégia de controle pode ser
simples e transparente ao usuário, ou seja, ele é capaz de compreender e prever os
efeitos de adição, alteração e exclusão de itens na base de conhecimento.
36
4.1 Componentes de um Sistema Especialista
Segundo RABUSKE (1995), um sistema especialista possui basicamente cinco
componentes (Figura 4) os quais são: máquina de inferência, base de conhecimento,
subsistema de aquisição de conhecimento, subsistema de explicação e interface do
usuário.
BASE DE CONHECIMENTO
MÁQUINA DE INFERÊNCIA
SUBSISTEMA DE
SUBSISTEMA
INTERFACE COM
AQUISIÇÃO DO
DE
O USUÁRIO
CONHECIMENTO
EXPLICAÇÃO
USUÁRIO
Figura 4 - Componentes de um sistema especialista (RABUSKE, 1997)
•
Base de conhecimento
A base de conhecimento fornece as características de funcionamento do sistema e
armazena os fatos e as regras a serem utilizadas. Vários sistemas especialistas usam
regras para sua operação, enquanto outros utilizam redes semânticas ou frames para a
representação do conhecimento.
37
A representação por regras, uma das mais utilizada em sistemas especialistas,
consiste na representação do conhecimento por pares de condição-ação, como regras
SE-ENTÃO, estruturadas da seguinte forma:
SE <condição> ENTÃO <ação>
Segundo BITTENCOURT (2001), o tipo de encadeamento é definido
normalmente conforme o problema a ser resolvido. Pode-se usar encadeamento
progressivo (forward chaining) quando se tem problemas de planejamento, projeto e
classificação; enquanto o encadeamento regressivo (backward chaining) é utilizado em
problemas de diagnóstico, ou seja, quando há algumas saídas possíveis e um grande
número de estados iniciais. Pode-se ainda ter encadeamento misto, onde os dois tipos se
alternam, em decorrência do desenvolvimento da solução do problema e da
disponibilidade dos dados.
Como no sistema especialista a base de conhecimento é separada da máquina de
inferência, consegue-se alterar com relativa facilidade o conhecimento presente na base,
por meio da inserção, alteração ou remoção de regras.
•
Máquina de inferência
A máquina de inferência é o mecanismo que procura as respostas na base de
conhecimento, indicando a operação a ser realizada sobre o conhecimento contido no
sistema especialista, para isso busca as regras necessárias a serem avaliadas, ordena-as
de uma maneira lógica e direciona o processo de inferência (JACKSON, 1991).
A estrutura da máquina de inferência relaciona-se diretamente com a natureza do
problema envolvendo, por exemplo, método de raciocínio e representação de incerteza
(Conjuntos Difusos, Método Bayesiano e outros).
38
•
Subsistema de aquisição do conhecimento
O subsistema de aquisição do conhecimento é utilizado para alimentar a base de
conhecimento, podendo-se introduzir novos conhecimentos e alterar ou eliminar
conhecimentos antigos, de acordo com a necessidade (MAUS, 1991).
•
Subsistema de explicação
O subsistema de explicação elucida a linha de
raciocínio que o sistema especialista usa para chegar a uma
conclusão. Este mecanismo é bastante interessante em
situações instrucionais (MAUS, 1991).
•
Interface com o usuário
Estabelece um meio de comunicação entre o usuário e
sistema,
exibindo
todas
as
perguntas,
respostas
resultados de consultas, e imprimindo relatórios.
interface pode ser em forma de menus, perguntas
representações gráficas.
o
e
A
e
Segundo BITTENCOURT (2001), algumas características
interessantes para a interface são: (i) interfaces de
diferentes tipos, conforme o tipo de usuário; (ii)
interrupção da execução do sistema sem necessidade de
reprocessamento ao executá-lo novamente; (iii) mensagens de
erro claras; (iv) capacidade de alterar certas entradas e
comparar os resultados; (v) possibilidade de armazenar
telas de execução.
4.2 Aplicações de Sistemas Especialistas
A aplicação dos sistemas especialistas ocorre em quase todos os tipos de
situações em que se necessita de raciocínios formais para sua solução, como por
39
exemplo,
diagnósticos
médicos
e
de
defeitos
em
equipamentos,
previsões
meteorológicas e outros que possuam um número grande de variáveis. O propósito
desses sistemas não é substituir o especialista, mas ampliar e organizar a sua experiência
e conhecimento. Já a medida que novas situações forem sendo identificadas, o acervo da
base de conhecimento é realimentado, tornando as novas informações disponíveis para
toda a organização, podendo incrementar a produtividade e o conhecimento (CUER &
HIRABARA, 1997).
Os sistemas especialistas aplicam-se em quase todas as áreas do conhecimento,
como na administração, advocacia, agricultura, computação, eletrônica, engenharia,
física, geologia, matemática, química e medicina, entre outros.
Segundo BITTENCOURT (2001), os sistemas especialistas mais conhecidos são:
• MYCIN: trata-se do primeiro sistema especialista que teve sucesso, sendo o
mais conhecido no mundo. É um sistema para diagnóstico e terapia de doenças
infecciosas, desenvolvido pelos Departamentos de Ciência da Computação e de
Medicina da Universidade de Stanford (EUA). A base do sistema é formada
por 450 regras, que lhe permite diagnosticar e prescrever tratamentos para
bacteremia, meningite e cistite infecciosa. A partir, do MYCIN foi
desenvolvida uma shell denominada EMYCIN, utilizada para implementar
outros sistemas especialistas.
• DENDRAL: é um projeto desenvolvido na Universidade de Stanford (EUA), a
partir de 1965, para desenvolver programas capazes de inferir a composição
molecular de compostos desconhecidos. Desde 1968 o sistema DENDRAL tem
sido utilizado em várias pesquisas sobre química orgânica, apresentando
resultados bastante satisfatórios.
O uso de sistemas especialista possibilita benefícios
como a velocidade na determinação dos problemas; decisão
baseada em conhecimento; segurança; estabilidade; menor
dependência
de
pessoal
específico
e
flexibilidade.
40
Ocasionando-se a proliferação desses sistemas na Medicina,
que necessita de informações rápidas e seguras (MÜLLER,
1997).
CAPÍTULO 5
INTELIGÊNCIA ARTIFICIAL MÉDICA
A aplicação da informática na Medicina tem se difundido em vários países, como
Estados Unidos, Itália, Grécia, Alemanha, Irlanda e Reino Unido, entre outros, que
realizam projetos entre si e difundem a informática médica em suas universidades,
visando o desenvolvimento de sistemas de apoio à prática e ensino médico
(FERNANDES, 1997).
Dentre
os
vários
momentos
da
moderna
história
da
informática, o surgimento da inteligência artificial
cativou cientistas e médicos pelo potencial que esta
tecnologia poderia ter se aplicada à Medicina, auxiliando
médicos em tarefas como o diagnóstico. A partir dessas
motivações, um pequeno e talentoso grupo de cientistas da
computação e profissionais médicos de vários centros de
pesquisas dos Estados Unidos, organizaram um programa de
pesquisa para uma nova área denominada de Inteligência
Artificial Médica (IAM). Estes pesquisadores tiveram a
visão de que a IAM revolucionaria a prática da Medicina,
sendo que as pesquisas realizadas nessa área, na primeira
década, constituem-se uma notável realização (COIERA,
1997).
No início da IAM, visava-se a construção de programas de IA que realizassem
diagnóstico e recomendações terapêuticas, porém desde então muito mudou.
Atualmente, a importância da diagnose em situações clínicas rotineiras recebe menos
ênfase; sistemas como os especialistas são voltados a ambientes laboratoriais e
educacionais, para vigilância e alertas clínicos ou em áreas muito ricas em dados, como
na Medicina Intensiva. Sendo que uma das tarefas mais importantes, que um
desenvolvedor de sistemas de IAM depara-se é com a caracterização precisa dos
42
aspectos da prática médica que são mais adequados a introdução de sistemas de IA
(COIERA, 1998).
Na
Inglaterra,
um
programa
para
diagnóstico
da
etiologia de uma dor abdominal aguda tem sido usado nas
enfermarias de alguns hospitais, o que reduziu em 50% as
taxas de apêndice perfuradas e reduziu de 36% para 14% a
incidência
de
cirurgias
abdominais
desnecessárias
(SABBATINI, 1993).
5.1 Histórico da Evolução da Inteligência Artificial Médica
Segundo BRONZINO (1995), a evolução da IAM pode ser dividida em quatro
estágios, que estão descritos a seguir:
• O primeiro estágio ocorreu por volta de 1968 a 1976, sendo bastante
influenciado pelo artigo “Medicine and the computer: The promise and
problems of change” (SCHWARTZ, 1970) que demonstrava o potencial dos
métodos informatizados para transformar a prática médica, possibilitando ao
médico se concentrar mais no cuidado ao paciente.
Nessa época surgiram os primeiros sistemas médicos, como o CASNET (1972)
que usou regras de trabalho causais para descrever os processos de doenças; o
MYCIN (1974) com o raciocínio baseado em regras; o DIALOG/INTERNIST
(1975) usando redes de trabalho hierárquicas, e o PIP (1976) utilizando frames
ou templates para definição das doenças. Estes sistemas foram projetados como
ferramentas de consulta para auxiliar médicos não especialistas ou outros
profissionais de saúde, por meio da aquisição de algumas regras do raciocínio
de um médico especialista em uma determinada área.
43
Assim, com o sucesso destes sistemas as pesquisas em inteligência artificial
voltaram-se aos sistemas baseados em conhecimento, ocorrendo a partir de
então a proliferação dos sistemas especialistas.
Os sistemas especialistas, como o próprio nome diz, são capazes de apoio à
decisão médica apenas em áreas especializadas da medicina, ou seja, quanto
mais especializada a área, melhor o sistema funciona (WIDMAN, 1998).
• O segundo estágio da evolução da IAM ocorreu entre 1977 e 1982, fase em que
usou-se estruturas gerais para construção da base de conhecimento especialista.
Em 1979, desenvolveu-se o EMYCIN, EXPERT e AGE, que foram
desenvolvidos e aplicados em diversos problemas médicos, como de
instrumentos de controle em UTI e na interpretação de testes laboratoriais para
aconselhar no diagnóstico e tratamento de várias doenças. Nesta fase ocorreu a
disseminação das idéias de sistemas especialistas e de shells para a
representação do conhecimento e decisões heurísticas, especialmente entre os
anos de 1981 e 1982.
• O terceiro estágio compreende o período de 1983 a 1987, época em que os
pesquisadores da IAM concentraram-se nas complexidades do raciocínio
médico e no desenvolvimento de formas para representá-lo; novos e poderosos
métodos foram introduzidos, como as redes neurais, que passaram a ser
aplicadas na tomada de decisão médica.
• O quarto estágio da IAM iniciou-se em 1987, caracterizando-se pelo contínuo
desenvolvimento de representações baseadas em conhecimento; progressos nas
experiências com o uso do raciocínio qualitativo; modelagem e controle em
processos críticos, como em UTI’s; interesse nos métodos estatísticos para a
tomada de decisão, unindo-se a modelos de processos representados em
diagramas de influência; redes bayesianas; desenvolvimento contínuo de
aplicações de redes neurais e conjuntos difusos. Caracterizando-se assim, a
44
crescente complexidade e diversidade da IAM, que se constitui num campo de
pesquisa em constante evolução.
5.2 Sistemas Inteligentes Desenvolvidos na Área Médica
Desde que começaram a ser utilizadas as técnicas de inteligência artificial em
Medicina, um grande número de sistemas de diferentes complexidades e nas mais
variadas áreas da Medicina foram e estão sendo desenvolvidos em diversos centros de
pesquisa. Dentre os quais pode-se destacar:
• CASNET/GLAUCOMA: desenvolvido na Universidade de Rutgers (EUA),
esse sistema é voltado para o diagnóstico e aconselhamento terapêutico nos
casos de glaucoma, que é a principal causa de perda de visão e cegueira. Na
década de 80, no Congresso Americano de Oftalmologia, este sistema foi
considerado como sendo um dos vinte melhores especialistas no assunto
(BRONZINO, 1995).
• PUFF: foi desenvolvido em 1979 por pesquisadores do Centro Médico
Presbiteriano do Pacífico e da Universidade de Stanford (EUA). O PUFF é um
sistema para interpretar medidas relacionadas a testes respiratórios e identificar
distúrbios respiratórios. A primeira versão do PUFF teve 64 regras SEENTÃO, sendo que a versão mais recente tem cerca de 400 regras. O
procedimento de validação do sistema foi realizado, comparando-se o seu
diagnóstico com o de dois médicos especialistas em pneumologia, concluindose que o sistema era consistente em mais de 90% dos casos testados (COIERA,
1997).
• VIE-PNN: é um sistema especialista que representa o conhecimento teórico e
clínico sobre a composição das soluções de nutrição parenteral para recémnascidos tratados em UTI Neonatal, desenvolvido por meio da cooperação do
Austrian Research Institute for Artificial Intelligence, Departament of Medical
45
Cybernetics and Artificial Intelligence, Department of Pediatrics of the
University of Vienna. A base de conhecimento do VIE-PNN consiste em regras
para compor a solução parenteral, aplicando-se estas regras os fluidos diários,
eletrólito, vitaminas e exigências nutricionais são calculadas de acordo com as
necessidades estimadas, o peso da criança, a idade e a tolerância individual. O
médico também pode ajustar valores calculados conforme exigências clínicas
especiais. O VIE-PNN está em uso na Áustria: UTI Neonatal - Department of
Pedriatics of the University of Vienna; UTI Neonatal - University of Graz
Medical School; Pediatric Clinic Glanzing em Viena (COIERA, 1997).
• POEMS (Post Operative Expert Medical Systems): é um sistema de apoio à
decisão no cuidado pós-operatório desenvolvido na University of Leeds, U.K.,
que oferece aconselhamento na ausência de um médico experiente e auxilia no
monitoramento dos aparelhos. O POEMS trabalha com dados referentes aos
pacientes como história médica, história operatória, exames e testes
investigativos. Destes dados, ele apresenta uma lista ordenada dos prováveis
diagnósticos e que tratamento seria mais satisfatório (COIERA, 1997).
• DXPLAIN: desenvolvido no Massachussetts General Hospital, o DXPLAIN é
usado para diagnóstico em Medicina Interna, a partir de um conjunto de
achados clínicos, incluindo sinais, sintomas e dados laboratoriais. O sistema
produz uma lista de diagnósticos possíveis por ordem decrescente de
importância e sugere investigações posteriores. O DXPLAIN contém uma base
de probabilidades aproximadas para cerca de 4,5 mil manifestações associadas
a 2 mil doenças diferentes. Esse sistema está em uso em vários hospitais e
escolas médicas, principalmente para educação clínica, sendo também utilizado
para consultas médicas (COIERA, 1998).
• QMR (Quick Medical Reference): desenvolvido na Universidade de
Pittsburg (EUA), realiza o diagnóstico diferencial em muitas áreas da medicina
interna, sendo também útil para ensino. O QMR abrange aproximadamente
80% da Medicina Interna, apresentando uma base de conhecimento com
46
informações sobre mais de 600 doenças e 4500 sinais e sintomas. Informados
os sinais e sintomas do paciente, o algoritmo do mecanismo de inferência do
QMR determina um escore seqüencial de probabilidades, baseando-se no
Teorema de Bayes, classificando assim as várias hipóteses diagnósticas. Em
1989, foi publicado um trabalho no Annals of Internal Medicine, que avaliou o
desempenho desse sistema na determinação de um diagnóstico, comprovandose que o sistema tem um desempenho semelhante ao de um especialista
(WIDMAN,1998).
• ILIAD: desenvolvido pelo Departamento de Informática Médica da
Universidade de Utah em Salt Lake City (EUA), o ILIAD tem abrangência em
Medicina Interna, sendo um sistema especialista para suporte à decisão ou
treinamento de profissionais e estudantes de Medicina. A base de
conhecimento foi construída partindo-se dos dados armazenados nos registros
clínicos do Hospital durante 12 anos, a estas informações foram acrescentadas
as opiniões de especialistas locais e dados retirados da literatura médica. O
mecanismo de inferência do sistema utiliza, além da lógica booleana, cálculos
probabilísticos, por meio do Teorema de Bayes (ELSON & CONELLY, 1995).
• LIST-S20: desenvolvido pelo Núcleo de Informática Biomédica da
Universidade Estadual de Campinas, este sistema é um novo instrumento para
multidiagnóstico em esquizofrenia. O LIST-S20 é um sistema especialista
baseado em regras, que utiliza um modelo similar ao processo de diagnóstico
diferencial empregado na prática clínica.
O uso de conjuntos difusos em aplicações na área médica, também têm estado
presentes em diferentes pesquisas, por exemplo, tem-se disponível na literatura alguns
sistemas difusos de diagnóstico como: RENOIR, sistema especialista na área de
reumatologia (BELMONTE-SERRANO et al, 1994); AMDIS para o diagnóstico da
osteoporose pós-menopausa (BINAGHI et al, 1993); MEDUS, sistema de diagnóstico
da dor abdominal aguda (FATHI-TORBAGHAN & MEYER, 1994); LITO para o
diagnóstico de doenças hepáticas (LESMO et al, 1989); FLORIDA, sistema especialista
47
para medicamento intensivo (PILZ, 1995) e ABVAB para o diagnóstico de hemorragia
vaginal anormal (WONG et al, 1990).
Além dos sistemas citados anteriormente, a seguir são apresentados outros, com
um breve comentário.
•
CADIAG-2: está entre os primeiros sistemas especialistas difusos, foi
desenvolvido para apoiar o diagnóstico e as decisões terapêuticas em vários
subdomínios da Medicina Interna. O CADIAG-2 usa a teoria dos conjuntos
difusos para capturar dados com incerteza em relação a diferentes aspectos tais
como: se os sintomas do paciente (sinais, resultados de testes laboratoriais) são
patológicos ou normais, se os sintomas necessariamente têm que ocorrer com a
doença, se eles suficientemente confirmam ou excluem a doença. O conceito
de representação de conhecimento e inferência difusa do CADIAG foi
confirmado aplicando-se o sistema em aproximadamente 500 casos clínicos, os
quais compreendiam 800 sintomas, sinais e resultados de testes laboratoriais,
que estavam presente, parcialmente presente ou ausente. A análise do
diagnóstico realizado pelo CADIAG-2 comparado com o diagnóstico clínico e
laboratorial atingiu precisão de 93%, o que é considerado suficiente para um
sistema de apoio à decisão médica. O CADIAG-2 tem sido utilizado como um
assistente do médico no processo de diagnóstico clínico e também como um
sistema tutorial para o ensino médico (STEIMANN & ADLASSNIG, 1998).
•
Sistema de Apoio à Decisão Médica em Valvulopatias: desenvolvido no
Departamento de Engenharia Biomédica da Universidade Estadual de
Campinas (UNICAMP), esse sistema implementa um algoritmo desenvolvido
com base nos conjuntos difusos e na teoria de clusters, em que a estenose e
insuficiência das válvulas cardíacas são descritas, com a possibilidade de
discriminar a ocorrência e o estágio de desenvolvimento das doenças (discreta,
moderada ou importante). Na fase de testes, verificou-se que o sistema foi
capaz de diagnosticar corretamente quase todas as valvulopatias, apresentando
48
um número de acertos maior para os estágios importantes em relação aos
estágios moderados e/ou discretos (FERREIRA & COSTA, 2000).
•
Sistema Difuso de Controle de um Eletroestimulador e de Simulação da
Resposta Muscular: este sistema encontra-se em fase de desenvolvimento no
Centro Federal de Educação Tecnológica do Paraná (CEFET/PR), visando
melhorar o controle da estimulação elétrica neuromuscular e monitorando a
posição do membro sob estimulação. As saídas dos sistemas difuso são: (1)
saída do controlador do eletroestimulador – quantidade que deve-se aumentar
ou diminuir da amplitude de estimulação em relação ao valor atual; (2) saída
do simulador da resposta muscular – o quanto o músculo contraiu ou alongou e
conseqüente alteração no ângulo da articulação. O sistema foi desenvolvido no
Simulink do MATLAB, já que oferece uma interação fácil com os módulos de
lógica difusa utilizados para o controle e simulação (SILVA & NOHAMA,
2000).
•
Controlador Neurofuzzy para Geração da Marcha Via Estimulação
Elétrica: desenvolvido pela Universidade Estadual de Capinas (UNICAMP) e
pela Pontifícia Universidad Católica del Perú, esse controlador é capaz de
predizer os padrões necessários de estimulação elétrica neuromuscular em
pacientes com lesão medular, visando seu uso em sistemas de reabilitação de
locomoção. Foram utilizadas estratégias de controle inteligente baseadas em
conjuntos difusos e redes neurais (PEREZ, CAJACURI, QUEVEDO, 2000).
Na Universidade Federal de Santa Catarina, já faz algum tempo que estão sendo
realizadas aplicações na área de inteligência artificial médica, reunindo-se nos projetos
o Centro de Ciências da Saúde, o Hospital Universitário e o Centro Tecnológico. Vários
sistemas foram desenvolvidos, como por exemplo:
• PROVANES (Proposta e Avaliação de Procedimentos Anestésicos): é um
sistema especialista integrado, com processamento semântico-numérico, redes
neurais, regras SE-ENTÃO, modelos clínicos e bases de dados, atuando
49
conjuntamente para dar apoio à tomada de decisão médica na proposta e
avaliação de procedimentos anestésicos. O PROVANES é um sistema
especialmente voltado para residentes do primeiro ano da especialidade de
anestesiologia (OJEDA, 1992).
• DoTor (Sistema para Apoio ao Diagnóstico de Dor Torácica Aguda de
Origem Não-Traumática): o sistema DoTor é capaz de diagnosticar doze
diferentes doenças, incluindo algumas potencialmente letais, cujo sintoma
comum é a dor torácica. Nesse sistema é utilizado o raciocínio por analogia
com protótipos de doenças, sendo a inferência realizada por meio do grau de
similaridade entre um protótipo e o caso real. Foi também implementado um
sistema de aprendizado com algoritmos genéticos paralelos, utilizado para
aumentar o desempenho do DoTor (LOPES, 1996).
• EPIIS (Sistema de Apoio ao Ensino do Diagnóstico de Epilepsia): o EPIIS é
um sistema inteligente de ensino, que utiliza inteligência artificial distribuída
por meio do paradigma de sociedade multi-agentes, incluindo uma interface
hipermídia. O EPIIS cria condições similares àquelas que o aluno encontrará
posteriormente na sua vida profissional (POZO, 1996).
• SEDMAN (Sistema Especialista para Diagnóstico Médico por Analogia
Nebulosa): o SEDMAN utiliza Raciocínio Baseado em Casos (RBC), para
modelar o raciocínio do especialista e conjuntos difusos para a representação
das variáveis lingüísticas representando assim a imprecisão nos dados clínicos.
Esse sistema tem seu domínio de aplicação na área de reumatologia, sendo
capaz de diagnosticar Artrite Reumatóide e Lupus Eritematoso (LINARES,
1997).
•
SDDEP (Sistema de Apoio ao Diagnóstico da Desnutrição EnergéticoProtéica): o SDDEP é um sistema especialista de apoio ao diagnóstico e
terapêutica segundo os três tipos clínicos de desnutrição grave em crianças de 0
a 18 meses. Utiliza Raciocínio Baseado em Casos (RBC), que possibilita
50
simular o raciocínio de um especialista utilizando a experiência de casos
passados para analisar e resolver uma situação atual. Com curto tempo de
resposta, taxa de acertos satisfatórias e interface amigável, o SDDEP fornece o
diagnóstico, bem como explicações e sugestões para o tratamento das crianças
(REIS & CARGNIN, 1998).
• SISPAN (Sistema de Apoio à Avaliação Nutricional em Pediatria): este é
um sistema especialista probabilístico para avaliação do estado nutricional de
crianças com até dois anos de idade. Neste sistema, a base de conhecimento,
chamada de Rede Bayesiana, contém a representação dos sinais, sintomas,
dados antropométricos e hipóteses diagnósticas (KOEHLER, 1998).
• SCDM (Sistema de Controle de Pacientes Portadores de Diabetes
Mellitus): o SCDM é um sistema de gerenciamento de dados, capaz de
administrar todo o processo de atendimento a pacientes diabéticos realizado no
Ambulatório de Endocrinologia do Hospital Universitário da Universidade
Federal de Santa Catarina. Tendo-se também um módulo especialista, que por
meio das técnicas de inteligência artificial é capaz de identificar se um paciente
apresenta ou não alguma predisposição para desenvolver complicações
cardiovasculares, baseando-se na análise dos fatores de risco (MONTELLO,
1999).
• SANPANEO (Sistema Especialista de Apoio à Nutrição Parenteral em
Recém-Nascidos): o SANPANEO é um sistema especialista para auxiliar na
prescrição de nutrição parenteral em recém-nascidos que baseia-se nos
parâmetros antropométricos, necessidades calóricas e hidroeletrolíticas, fatores
que levaram à indicação deste tipo de nutrição (SOUZA, 1999).
• SACI (Sistema de Apoio na Avaliação de Distúrbios do
Crescimento Infantil): é um sistema especialista
probabilístico
para
o
diagnóstico
de
alguns
distúrbios relacionados à falência do crescimento em
crianças com até 2 anos de idade. As hipóteses
51
diagnósticas
do
SACI
engloba
má
absorção
por
intolerância à lactose, deficiência de ferro e
etiologia a esclarecer. O SACI foi desenvolvido para
as plataformas DOS e Windows, no ambiente Delphi 5,
utilizando as DLL’s da shell Netica (SIMÕES, 2001).
5.3 Exemplos de Sistemas Desenvolvidos na Área de Ventilação
Mecânica
No domínio de aplicação desta pesquisa, ou seja, na área de ventilação mecânica,
tem-se alguns trabalhos realizados, os quais serão descritos a seguir.
• Identificação da Mecânica Respiratória e Controle da PEEP Durante
Ventilação Mecânica – Simulação: desenvolvido na Universidade Federal do
Rio de Janeiro, esse trabalho consiste num simulador do comportamento
mecânico do sistema respiratório durante ventilação mecânica, com ondas de
vazão ou pressão controlada. Este sistema incorpora rotinas de regressão linear
múltipla e também possui a capacidade de adquirir e processar sinais. Com esta
simulação, estudou-se a regressão linear múltipla como uma ferramenta para
controlar a pressão positiva nos pulmões ao fim da expiração (PEEP) e como
forma de identificação dos parâmetros mecânicos (resistência, complacência e
PEEP) do sistema respiratório. Como resultados desse trabalho, verificou-se
que a identificação da mecânica respiratória, da forma como foi implementada,
mostrou-se satisfatória apenas para o acompanhamento da evolução do quadro
clínico de pacientes. Por outro lado, o controle automático da PEEP mostrou
ser potencialmente útil e passível de utilização prática (PINO, 1996).
•
SILMEV (Sistema Simulador e de Treinamento da Ventilação
Mecânica Usando o Ventilador Pulmonar): desenvolvido no Programa de
Pós-Graduação em Engenharia Elétrica, na Universidade Federal de Santa
Catarina, esse sistema simulador da ventilação mecânica utiliza no seu
desenvolvimento modelos matemáticos da mecânica respiratória e do
52
ventilador pulmonar. Os modelos representam tanto o comportamento normal
quanto patológico, tendo-se diferentes doenças do pulmão e das vias aéreas de
um paciente hipotético sob ventilação mecânica. O simulador possibilita testar
e avaliar o suporte ventilatório controlado, podendo-se configurar as variáveis
de controle, fase e base (CAJACURI, 1997).
Os parâmetros do modelo são definidos pelo usuário no processo de
configuração do paciente e do ventilador simulado, não havendo ajuste
automático de parâmetros. O SILMEV apresenta características didáticas,
incluindo em conjunto a mecânica respiratória do paciente e o ventilador
pulmonar, para que seja possível aprender os procedimentos da ventilação
mecânica na UTI.
A estrutura funcional do simulador pode ser observada na Figura 5, tendo-se a
interface com o usuário, onde serão configurados os modelos tanto da
mecânica respiratória, quanto do ventilador pulmonar.
INTERFACE COM O USUÁRIO
ESTÁTICA
DINÂMICA
MODO DE VENTILAÇÃO
MODELO DA
MODELO DO
MECÂNICA RESPIRATÓRIA
VENTILADOR
SIMULADOR PACIENTE - VENTILADOR
APRESENTAÇÃO CONVENCIONAL
DE RESULTADOS
Figura 5 - Estrutura funcional do simulador (CAJACURI, 1997)
O SILMEV define a mecânica do aparelho respiratório, determinando os
volumes e capacidades pulmonares; característica estática do pulmão e tórax; e
o comportamento dinâmico do fluxo de ar nas vias aéreas. Os parâmetros da
mecânica respiratória apresentam primeiramente os valores normais de uma
pessoa adulta, porém o SILMEV possibilita que sejam definidos outros valores.
53
O SILMEV possibilita que sejam simulados de forma completa os modos
ventilatórios controlados e de forma restrita os modos assistido/controlado, já
que o sistema não dispõe de um modelo matemático do padrão respiratório do
paciente.
O SARE, sistema desenvolvido nesta pesquisa, é um trabalho na área de
inteligência artificial médica, para ser utilizado em ambientes de Unidade de
Tratamento Intensivo (UTI). Constituindo-se numa abordagem da teoria de conjuntos
difusos para o controle de parâmetros da assistência respiratória em neonatos, estas
características o diferenciam dos exemplos aqui mostrados.
CAPÍTULO 6
CONJUNTOS DIFUSOS
A reprodução de características inteligentes em máquinas construídas pelo homem
é um dos objetivos mais perseguidos pela comunidade científica e tecnológica, surgindo
e desenvolvendo-se vários métodos computacionais. Nesse contexto, tem-se os
conjuntos difusos que trabalham com a imprecisão e o raciocínio aproximado.
Assim, nesse contexto, busca-se uma solução aproximada para um problema
formulado imprecisamente o que é difícil para os métodos computacionais
convencionais, pois estes métodos não tratam do problema de se explorar a tolerância
por imprecisão.
Diante de situações como essa, os pesquisadores sentiram a necessidade de novos
métodos. Surgindo a idéia dos conjuntos nebulosos ou difusos (fuzzy), que partiu de
L.A. Zadeh e R. Bellman. Eles verificaram a necessidade de criar uma teoria que
trabalhasse com a imprecisão em sistemas dinâmicos, já que os recursos tecnológicos
disponíveis eram incapazes de automatizar as atividades relacionadas a problemas de
natureza industrial, biológica ou química, que compreendessem situações ambíguas, não
passíveis de processamento por meio da lógica computacional fundamentada na lógica
booleana. Zadeh, conhecido como o grande colaborador do Controle Moderno, publicou
em 1965 o artigo “Fuzzy Sets” o qual faz a formalização dos conjuntos difusos.
Incentivados pelas possibilidades das aplicações que foram desenvolvidas
utilizando-se conjuntos difusos, os estudos na área de sistemas difusos e controle de
processos cresceram bastante nos últimos tempos, tendo-se destacado como uma área de
pesquisa promissora. A cada dia surgem novos e diferentes produtos que o utilizam no
seu funcionamento, já que tenta imitar o trabalho do cérebro humano, sendo aplicado
em processos que se modelam de maneira semelhante à do pensamento humano
(KOSKO, 1994).
55
A nova teoria proposta por Zadeh começou a ser utilizada primeiramente no
Japão, chamando a atenção dos demais países pelo sucesso das aplicações
desenvolvidas, tornando-se essa uma das mais interessantes teorias para implementar
sistemas de controle e de inteligência artificial.
6.1 Conceitos Gerais
Os conjuntos difusos são uma técnica inteligente que fornecem um mecanismo
para que se possa manipular informações imprecisas, como conceitos de pequeno, alto,
bom, muito quente, frio, entre outros, que permitem inferir uma resposta aproximada
para uma questão baseada em um conhecimento que é inexato, incompleto ou não
totalmente confiável. Tendo como objetivo modelar o modo aproximado de raciocínio,
tentando imitar a habilidade humana de tomar decisões racionais em um ambiente de
imprecisão (KLIR & YUAN, 1995).
Os conjuntos difusos são capazes de incorporar o conhecimento objetivo, ou seja,
aquele a partir de dados numéricos; como também o conhecimento subjetivo, aquele a
partir de informações lingüísticas. Esses conjuntos suportam os modos de raciocínio que
são aproximados, ao invés de exatos, respeitando critérios subjetivos.
Ao contrário dos conjuntos tradicionais (conjuntos crisp), nos quais um elemento
pertence ou não a este conjunto, assumindo apenas dois valores {0, 1}, os conjuntos
difusos podem ser vistos como uma generalização dos conjuntos tradicionais, nos quais
as funções que representam elementos do conjunto, assumem valores reais dentro do
intervalo [0,1]. Então, a idéia de conjunto difuso está associada a um grau de
pertinência, que varia de acordo com o elemento em questão.
Desta forma, um elemento pode pertencer muito ou pouco e até não pertencer a
um conjunto difuso. O grau de pertinência varia de 0 a 1, isto é, da completa exclusão
até a total pertinência, podendo assumir todos os valores intermediários. Ou seja, o
56
elemento pertence ao conjunto segundo um determinado nível ao qual é dado o nome de
grau de pertinência.
Veja:
µ(x)
1
0 ≤ x < 2, x não pertence
2 ≤ x < 4, x pertence cada vez mais
4 ≤ x < 6, x pertence cada vez menos
0
2
4
6
x
x ≥ 6, x não pertence
Então, o grau de pertinência em um conjunto difuso é medido pela generalização
de uma função característica chamada função de pertinência e definida por:
µA(x): x → [0,1]
Essa função de pertinência mapeia x no domínio dos números reais definidos no
intervalo desde 0 a 1, inclusive. A função de pertinência é um número real definido por
(KLIR & YUAN, 1995):
0 ≤ µA ≤ 1
Onde: 0 significa não pertinência e 1 significa total pertinência ao conjunto. Por
exemplo, um valor particular qualquer como 0.4 é chamado grau de pertinência de um
elemento x a um conjunto A.
Um conjunto difuso A em X é caracterizado como um conjunto de pares
ordenados de um elemento genérico x e o seu valor para a função de pertinência, então
(KLIR & YUAN, 1995):
A = {(x, µA(x)); x ∈ X}
57
Uma função de pertinência deverá refletir o conhecimento que se tem em relação
a intensidade com que um objeto pertence a um conjunto difuso. A função de
pertinência é utilizada para medir o grau de pertinência de um objeto a um conjunto
difuso. A seguir, tem-se alguns exemplos das funções de pertinência.
1- Função Triangular
2- Função Z
3- Função Trapezoidal
4- Função S
O grau de pertinência é definido por meio da função de pertinência, que é definida
com base na intuição ou experiência. O número de funções de pertinência e a forma
apropriada são determinados levando em consideração fatores como a exatidão e
estabilidade do sistema, facilidade de implementação, manipulação e manutenção
(ROSS, 1995).
A função de pertinência µA(x) descreve a existência da “percepção”, “confiança”
ou “crença” que x ∈ A. Nota-se que a designação de uma função de pertinência para um
conjunto difuso é subjetivo, refletindo o contexto no qual o problema é visto (GUPTA
et al, 1988).
58
Conforme ROSS (1995), nos conjuntos difusos o eixo x compreende uma
classificação inteira ou o universo de discurso do sistema, o eixo y mapeia uma faixa de
0 a 1 e representa o grau pelo qual um valor é membro de um conjunto difuso. Como
todas as informações contidas em um conjunto difuso estão descritas pela função de
pertinência, torna-se importante descrever as características desta função (Figura 6).
µ(x)
1
Núcleo
Limites
x
Suporte
Figura 6 - Características da função de pertinência
As funções de pertinência são monotonicamente crescentes, decrescentes ou
subdivididas em parte crescente e outra decrescente.
O núcleo de uma função de pertinência para um conjunto difuso é a região do
universo que é caracterizada pela pertinência completa ou total em um conjunto difuso.
Assim, dado um conjunto difuso qualquer A, o núcleo é compreendido pelos elementos
do universo x onde µA(x) = 1.
O suporte de uma função de pertinência para um conjunto difuso é a região do
universo caracterizada por pertinência diferente de zero, ou seja, aqueles elementos de
um universo x onde µA(x) ≠ 0.
Por exemplo: dado um conjunto difuso
A = { (1, 0.2), (2, 0.5), (3, 0.8), (4, 1.0), (5, 0.7), (6, 0.3) },
o suporte é S(A) = {1, 2, 3, 4, 5, 6}.
59
Os limites de uma função de pertinência para um conjunto difuso são
considerados como aquela região do universo que contém uma pertinência diferente de
zero, mas não uma pertinência completa, ou seja, os limites são compreendidos pelos
elementos de um universo x onde 0 < µA(x) < 1.
Outra característica importante das funções de pertinência é aquela que se refere a
normalização, ou seja, um conjunto difuso normalizado é aquele cuja função de
pertinência tem pelo menos um elemento no universo x cuja pertinência é igual a 1.
µ
µ
0.8
x
x
Não-normalizado
Normalizado
A convexidade é outra característica das funções de pertinência, ou seja, um
conjunto difuso convexo é todo o conjunto difuso em que para dois pontos quaisquer
de sua função de pertinência, o segmento da reta que os une também pertence ao
conjunto.
µ
µ
Convexo
x
Não convexo
x
A cardinalidade |A| para um conjunto difuso finito A é definida como:
|A| = Σ µA (x), onde x ∈ X
60
Por exemplo, dado o conjunto difuso:
A = {(1, .2), (2, .5), (3, .8), (4, 1), (5, .7), (6, .3)}, a cardinalidade do conjunto é
|A| = .2 + .5 + .8 + 1 + .7 + .3 = 3.5
6.2 Operações com Conjuntos Difusos
As operações com conjuntos difusos são união, intersecção e complemento, sendo
definidas por meio de suas funções de pertinência.
•
Intersecção entre conjuntos difusos: a intersecção C = A ∩ B está sendo
definida como sendo a intersecção padrão, que utiliza-se do mínimo:
µC = min ( µA(x), µB(x) ), x ∈ X
Figura 7 - Intersecção entre conjuntos difusos
• União entre conjuntos difusos: a união D = A ∪ B é definida como sendo a
união padrão:
µD = max ( µA(x), µB(x) ), x ∈ X
Figura 8 - União entre conjuntos difusos
61
•
Complemento: o complemento padrão de um conjunto difuso A, µCA(x), é
definido como:
µCA(x) = 1 - µA(x), x ∈ X
Figura 9 - Complemento de um conjunto difuso
Por exemplo, dado os seguintes conjuntos difusos:
A = { (1, .2), (2, .5), (3, .8), (4, 1), (5, .7), (6, .3)}
B = { (3, .2), (4, .4), (5, .6), (6, .8), (7, 1), (8, 1)}
Então, tem-se:
D = A ∩ B = { (3, .2), (4, .4), (5, .6), (6, .3)}
E = A ∪ B = { (1, .2), (2, .5), (3, .8), (4, 1), (5, .7), (6, .8), (7, 1), (8, 1)}
µCB = { (1, 1), (2, 1), (3, .8), (4, .6), (5, .4), (6, .2), (9, 1), (10, 1)}
6.3 Variáveis Lingüísticas
Um conjunto difuso é formado por um ou mais conjuntos que são identificados
por variáveis lingüísticas e caracterizados pelas suas funções de pertinência.
As variáveis lingüísticas são variáveis cujos valores não são números, mas sim
palavras ou frases na linguagem natural. Os conjuntos difusos e as variáveis lingüísticas
podem ser utilizados para quantificar o significado da linguagem natural, a qual pode
logo ser manipulada. Essas variáveis lingüísticas são representadas nos conjuntos
difusos, possibilitando uma aproximação com o mundo real (BASTOS, 1994).
62
A seguir, mostra-se algumas variáveis lingüísticas e os valores típicos que
poderiam ser designados a elas.
Tabela 1 - Variáveis lingüísticas e seus valores
VARIÁVEL LINGÜÍSTICA
VALORES TÍPICOS
Estatura
baixa, mediana, alta
Idade
Criança, jovem, adulto, idoso
Cor
Temperatura
Vermelho, verde, amarelo, laranja
Muito baixa, baixa, média, alta, muito alta
As variáveis lingüísticas não possuem valores precisos, representam um espectro
de valores. Quando se define, por exemplo, que uma pessoa é alta, isto não significa um
valor exato, mas sim um intervalo de valores.
6.4 Etapas de Implementação de um Sistema Difuso
Os sistemas difusos diferem dos sistemas convencionais por se aproximarem mais
do pensamento humano e da linguagem natural, sendo portanto, mais utilizados em
sistemas que visam capturar e aproximar a natureza inexata do mundo real. Esses
sistemas além de tratarem a imprecisão, são também capazes de modelar o raciocínio de
senso comum (LEE, 1990).
Para o desenvolvimento de um sistema difuso pode-se definir alguns passos,
como: (i) determinar se a escolha de fazer um sistema difuso realmente é adequada para
a solução do problema; (ii) identificar a extensão dos parâmetros de entrada e saída; (iii)
definir a função de pertinência para cada parâmetro de entrada e saída, sendo a escolha
da função de pertinência influenciada pelo comportamento do sistema; (iv) construir
uma base de regras; (v) verificar se a base de regras de saída está dentro da extensão das
entradas correspondentes e se está correta (RÉ, 1995).
63
A estrutura básica de um sistema difuso envolve processos de fuzificação,
inferência e defuzificação (Figura 10).
Regras
Entrada
Saída
Crisp
Defuzificação
Fuzificação
Crisp
Inferência
Fuzzy
Figura 10 - Estrutura básica de um sistema difuso (LEE, 1990)
•
Fuzificação das Entradas
O processo de fuzificação é aquele em que determina e calcula um valor para
representar o grau de pertinência de entrada em um ou mais conjuntos difusos, sendo
que cada valor de entrada terá um grau de pertinência em cada conjunto (FERNANDES,
1997).
Portanto, nessa etapa os valores numéricos são transformados em graus de
pertinência para um valor lingüístico. Permitindo uma ligação entre os termos
lingüísticos (frio, próximo, quente, e outros) e as funções de pertinência.
Segundo VIOT (1993), o número e a forma das funções de pertinência em
conjuntos difusos são escolhidos dependendo da exatidão, resposta, estabilidade,
facilidade de implementação, manipulação e manutenção requeridas pelo sistema.
•
Inferência
Depois das variáveis lingüísticas serem interpretadas, por meio da fuzificação, a
próxima etapa será a descrição das situações nas quais há reações, ou seja, a
64
determinação das regras SE-ENTÃO. Cada regra na saída especifica uma ou várias
conclusões.
O antecedente da regra contém uma ou mais condições e o conseqüente contém
uma ou mais ações. O antecedente da regra corresponde aos graus de pertinência
calculados durante a fuzificação. Durante a avaliação das regras, a intensidade de saída
é calculada com base em valores dos antecedentes e estão indicadas pelas saídas difusas
da regra.
•
Defuzificação
A defuzificação converte um conjunto difuso de saída de um sistema em um valor
crisp correspondente. Esse processo é importante para decifrar o significado da ação
difusa usando função de pertinência e também para resolver conflitos entre ações de
competição (VIOT, 1993).
Conforme VIOT (1993), existem várias formas de defuzificação, dentre as quais
destacam-se:
• Método do Centro de Gravidade (COA): é bastante utilizada para gerar o
centro de gravidade da distribuição de possibilidade. Determina-se um ponto
central sobre o eixo x, para cada função de pertinência de saída. A
defuzificação é produzida pela média ponderada dos pontos do centróide do
eixo x pelas áreas são consideradas (Figura 11).
Y
Saída 1
1
Saída 2
0.6
0.4
0
10
20
30
40
50
60
70
32,4
Figura 11 - Defuzificação pelo método do centro de gravidade
X
Saídas
Sistema
65
O cálculo para a obtenção do centróide (Figura 11) é descrito a seguir:
no eixo x a centróide é: ponto 1 = 20
ponto 2 = 50
o grau de pertinência: saída 1 = 0.6
saída 2 = 0.4
área 1 = 0.6 (40+28)/2 = 20.4
área 2 = 0.4 (40+32)/2 = 14.4
média ponderada = 20.4 (20) + 14.4 (50) / 20.4 + 14.4 = 32.4
• Método do Critério Máximo (MAX): gera um ponto onde a distribuição de
possibilidade atinge um valor máximo, escolhendo-se a ação para a qual a
função de pertinência tem um valor máximo.
• Método da Média Máxima (MOM): produz uma ação de controle que
representa o valor médio de todas as ações cuja função de pertinência atinge o
máximo.
6.5 Sistema Difuso de Controle
GUPTA & TSUKAMOTO (1980), consideram o controle difuso como um avanço
em relação ao controle matemático convencional preciso e a tomada de decisão similar
a realizada por um agente humano. A metodologia desses controladores difusos é útil
quando os processos são complexos para serem modelados por meio das técnicas
quantitativas convencionais, ou também quando as fontes de informações são de forma
qualitativa ou imprecisa.
O controle difuso tem se destacado como uma das áreas mais ativas para pesquisa
na aplicação da teoria de conjuntos difusos, tendo-se aplicações para o controle da
qualidade de água, para operação de trem automático, de reator nuclear, de elevador, da
poluição em túneis urbanos, da direção de veículos autoguiados, entre outros (LEE,
1990).
66
A essência de um controlador difuso é o conjunto das regras lingüísticas de
controle, que se baseiam no conhecimento de um especialista, apresentando conceitos
de conjuntos difusos e regra de inferência. O Contolador Lógico Difuso (Fuzzy Logic
Control - FLC), proporciona um algoritmo capaz de converter a estratégia lingüistica
em uma estratégia de controle automático (RÉ, 1995).
Um sistema de controle difuso trata do relacionamento entre entradas e saídas,
agregando vários parâmetros de processo e controle. O processo pode ser controlado a
partir de um conjunto de regras difusas SE–ENTÃO, capaz de coordenar conhecimentos
incompletos e imprecisos.
No desenvolvimento de um controlador difuso é importante analisar várias ações
que modelam a atividade de controle humano, como: (i) as características do
comportamento de controle humano; (ii) o desenvolvimento da habilidade para
controlar o processo; (iii) as diferenças entre operadores de processos; (iv) fatores que
influenciam na performance e (v) a organização do comportamento de controle do
operador (PEDRYCZ, 1988).
Um sistema difuso de controle, conforme LEE (1990), apresenta quatro
componentes importantes, com as seguintes funções:
• Interface de fuzificação: desenvolvimento de uma escala que transfere a lista
de valores das variáveis de entrada dentro do universo de discurso
correspondente, e também da função de fuzificação que converte os dados de
entrada.
• Base de conhecimento: possui o conhecimento do domínio de aplicação e o
controle de metas, apresentando uma base de dados e uma base de regras de
controle lingüístico.
• Lógica de tomada de decisão: é capaz de simular a tomada de decisão
humana, baseando-se no conceito difuso e na dedução da ação de controle
utilizando implicação difusa e regras de inferência difusas.
67
• Interface de defuzificação: converte as variáveis de saída dentro do controle,
partindo da dedução da ação de controle.
A Figura 12, mostra a estrutura de um controlador difuso.
Base de
Conhecimento
Interface de
Lógica de Tomada
Interface de
Fuzificação
de Decisão
Defuzificação
Controlador do
Sistema
Figura 12 - Estrutura básica de um controlador difuso (LEE, 1990).
6.6 Algumas Ferramentas para Desenvolvimento de Sistemas Difusos
Existem alguns softwares para o desenvolvimento de sistemas difusos, como
Fuzzy Logic Inferencing Engine (FLIE), Fuzzy Logic Development Environment
(FLDE), FuzzyTECH, Fuzzy Knowledge Builder, XFUZZY, FuzzyJAVA, UNFUZZY,
FuzzyCLIPS, MATLAB, entre outros.
A seguir são comentadas algumas ferramentas para o desenvolvimento de
sistemas difusos, as quais facilitam o processo de desenvolvimento de sistemas desse
tipo.
• FuzzyCLIPS: é uma shell para o desenvolvimento de sistemas especialistas
baseados em conjuntos difusos, que foi implementada para a representação e
manipulação de fatos e regras difusas, possibilitando que se trabalhe
juntamente com termos difusos e crisp. A figura 13, mostra a tela do
FuzzyCLIPS.
68
• MATLAB: o seu módulo difuso (ToolBox Fuzzy) é uma das ferramentas mais
tradicionais, permitindo desenvolver sistemas difuso e gerar o código em C++.
Na figura 14, mostra-se a interface da ToolBox Fuzzy do MATLAB.
• UNFUZZY: é um ambiente para simulação e desenvolvimento de sistemas
difusos, que gera o código fonte em C e C++. Na figura 15, tem-se a janela
principal do UNFUZZY.
Figura 13 - Tela principal do FuzzyCLIPS
69
Figura 14 - Interface da ToolBox Fuzzy do MATLAB
Figura 15 - Janela principal do UNFUZZY
70
O sistema desenvolvido, denominado SARE, é difuso, pois tanto os seus dados de
entrada, ou seja, aqueles referentes a gasometria arterial, bem como os de saída, que
referem-se aos parâmetros do ventilador mecânico são considerados variáveis difusas.
As variáveis de entrada da gasometria arterial, podem ser classificadas nos
conjuntos difusos muito baixo, pouco baixo, normal e alto. Enquanto as ações de
controle no ventilador mecânico, também podem estar classificadas: em aumentar,
manter e diminuir.
Para a implementação do protótipo, não se utilizou nenhuma das ferramentas
apresentadas anteriormente, a fim de que houvesse uma maior compreensão sobre as
etapas englobadas no desenvolvimento de um sistema difuso. Optou-se pela
implementação do SARE no ambiente de programação Delphi 5.0, já que proporciona a
criação de aplicações visuais utilizando-se de orientação a objetos.
CAPÍTULO 7
DOMÍNIO DE APLICAÇÃO
Neste capítulo, será comentado o domínio de aplicação, relativo aos diferentes
aspectos da área médica cujo entendimento é importante para que fosse possível a
realização do sistema.
7.1 A Mecânica Respiratória
A respiração tem como função principal prover oxigênio às células do corpo e
remover o excesso de dióxido de carbono. O ar, assim como a água, flui de uma zona de
alta pressão para uma de baixa pressão. Para que ocorra a inspiração a pressão alveolar
deve ser menor que a pressão atmosférica, enquanto na expiração a pressão alveolar
deve ser maior que a pressão atmosférica (COMROE, 1975).
Segundo GUYTON (1993), o processo de respiração compreende quatro fases:
ventilação pulmonar; difusão de oxigênio e dióxido de carbono entre os alvéolos e o
sangue; transporte de oxigênio e dióxido de carbono no sangue e nos líquidos orgânicos
para dentro e fora das células; regulação da respiração.
A ventilação pulmonar significa a entrada (inspiração) e saída (expiração) de ar
entre a atmosfera e os alvéolos (COMROE, 1975) e (CARVALHO, 1993).
•
Inspiração: é realizada pela contração ativa dos músculos de inspiração,
principalmente o diafragma. Assim, aumenta-se o volume torácico e cria-se
uma pressão interpleural negativa, normalmente menor que a pressão
atmosférica, o que possibilita o ingresso de ar no pulmão e insuflação dos
alvéolos, ductos alveolares e bronquíolos. Conforme o ar vai penetrando no
71
pulmão, a pressão alveolar vai aumentando, até que o gradiente de pressão
inicial termine, sendo esse o momento do término da inspiração.
• Expiração: é um processo inteiramente passivo, ou seja, quando o diafragma
se relaxa, as estruturas elásticas do pulmão, da caixa torácica e do abdômen,
forçam o diafragma para cima. Nessa fase gera-se um gradiente de pressão
positiva inverso, sendo a pressão alveolar maior que a pressão atmosférica,
assim por meio desse gradiente o ar sai do pulmão. À medida que o ar vai
saindo do pulmão, a pressão alveolar vai diminuindo até que o gradiente de
pressão volta a terminar, sendo esse o momento final da expiração.
7.2 Assistência Respiratória
A assistência respiratória pode ser definida como o movimento de gás para dentro
e fora do pulmão por meio de um recurso externo conectado diretamente ao paciente.
Esse recurso externo pode ser uma bolsa de ressurreição, um dispositivo que mantém a
pressão contínua nas vias aéreas, por exemplo, CPAP (Pressão Positiva Contínua nas
Vias Aéreas) nasal ou um ventilador mecânico (GOLDSMITH & KAROTKIN, 1988).
Em neonatos, a assistência respiratória é normalmente uma medida temporária
para apoiar a mecânica respiratória até o paciente poder respirar adequadamente sem
ajuda. Tem como finalidade proporcionar ventilação alveolar e remoção de gás
carbônico, oxigenação adequada e uma redução do trabalho respiratório. Isto é realizado
por um dispositivo que substitui a ação de contração e relaxamento da musculatura
respiratória (ibidem).
A assistência respiratória de neonatos é um procedimento complexo e altamente
invasivo. Para ventilar efetivamente o pulmão doente, tem-se que entender a fisiologia
pulmonar normal, como também a fisiopatologia das doenças pulmonares em neonatos
(ibidem).
72
O médico também tem que correlacionar o tipo de terapia para a fase do
crescimento e desenvolvimento pulmonar, bem como para a severidade da doença.
Deve-se também conhecer os princípios mecânicos básicos do respirador em uso.
Efeitos benéficos da terapia ventilatória são dependentes de uma ampla base de
conhecimento dos assuntos, habilidades e experiência em gerenciamento combinado a
uma constante vigilância por médicos e equipe de enfermagem durante o tratamento.
7.2.1 Histórico da Ventilação Pulmonar Mecânica
Na literatura médica dos últimos séculos encontram-se descritas inúmeras
tentativas de ventilação, sendo que o primeiro médico a investigar e relatar sua
experiência com intubação da traquéia, com o objetivo de dar suporte ventilatório, foi
Hipócrates (460 – 377 a.C.). Em 1543, começou-se a utilizar a ventilação artificial, mas
somente como um método de estudo da fisiopatologia pulmonar. A partir de 1800,
aumentou o interesse pela reanimação e ventilação de neonatos, sendo desta época a
referência de uma intubação nasotraqueal com ventilação mecânica, publicada em
Genebra (CARVALHO et al, 1993).
Em 1789 foi desenvolvido o aerofole pulmonar, primeiro invento específico para
reanimação e ventilação por curtos períodos de tempo de neonatos. Desde então, vários
pesquisadores desenvolveram novas técnicas de ventilação mecânica, introduzindo-as
na prática médica. Até que em 1971 um novo protótipo de ventilador neonatal foi
desenvolvido, constituindo-se num marco na história da ventilação mecânica pediátrica
(ibidem).
A partir dessas descobertas e à medida que a fisiologia pulmonar foi sendo melhor
entendida, várias pesquisas e estudos foram realizados, aprimorando-se tanto as técnicas
quanto os aparelhos (ibidem).
73
7.2.2 Tipos e Classificação de Ventiladores Mecânicos
O movimento de ar para dentro e fora do pulmão é resultante de uma diferença de
pressão entre a via aérea superior e a pressão alveolar. Dessa forma, a ventilação pode
ser estabelecida por uma diminuição na pressão alveolar, ou seja, ventilação por pressão
negativa; ou pelo aumento na pressão da via aérea superior, que é a ventilação por
pressão positiva (PIVA et al, 1997).
Nos dispositivos de pressão positiva, a classificação mais comum é pela forma
como é ciclado, ou seja, o modo como o ciclo inspiratório é finalizado, permitindo o
início da expiração. Há cinco tipos básicos (PIVA et al, 1997):
• Ciclados a volume: a inspiração termina quando um certo volume é alcançado.
• Ciclados a pressão: a inspiração termina quando a pressão pré-fixada é
alcançada.
• Ciclados a tempo: a inspiração termina quando o tempo pré-fixado é atingido.
• Ciclados a fluxo: a inspiração termina quando o fluxo alcançou um nível
baixo.
• Mistos: dois ou mais mecanismos independentes estão presentes no mesmo
ventilador.
A maioria dos ventiladores de pressão positiva para neonatos são classificados em
três categorias: ciclados a pressão, tempo e volume.
Os ventiladores também podem ser classificados de acordo com o controle da
ventilação, freqüentemente denominado de modo de ventilar, podendo ser uma
ventilação
mecânica
controlada,
assistida-controlada,
intermitente (CARVALHO et al, 1993).
assistida
e
mandatória
74
• Ventilação Mecânica Controlada (VMC): o ventilador mecânico fornece um
número predeterminado de ciclos ventilatórios por minuto, sendo ativado com
uma determinada freqüência, independentemente de qualquer esforço
inspiratório do paciente, não permitindo que ele apresente movimentos
respiratórios espontâneos. Esse modo de ventilar é aplicado em situações
específicas e restritas, quando ocorre diminuição da condição ventilatória, por
exemplo nos casos de recuperação de sedação anestésica e lesões do sistema
nervoso central que necessitem de hiperventilação (ibidem).
• Ventilação Mecânica Assistida – Controlada (VMAC): nesse modo o
ventilador mecânico fornece um ciclo ventilatório quando o esforço
inspiratório do paciente o deflagra, ou quando este esforço não acontece em um
determinado período preestabelecido. O aparelho fornece um número
específico de respirações por minuto, apesar do esforço do paciente (ibidem).
• Ventilação Mecânica Assistida (VMA): nesse modo de ventilação, a
freqüência respiratória é desencadeada pelo paciente, enquanto o volume
corrente e a taxa de fluxo são estabelecidos pelo médico. Porém, poucos
aparelhos desse modo são adequados para ventilação em pacientes pediátricos
(ibidem).
• Ventilação Mandatória Intermitente (VMI): esse modo de ventilação
permite que o paciente respire espontânea e independentemente dos ciclos
ventilatórios do aparelho (ibidem).
7.2.3 O Ventilador Mecânico
Considerando-se o modo de operar de qualquer ventilador mecânico por pressão
positiva, como o que será utilizado no trabalho, deve-se distinguir, segundo
CARVALHO et al (1993), quatro funções básicas do respirador:
75
• insuflar o pulmão (fase inspiratória);
• possuir mecanismo para terminar a fase inspiratória (fase de troca da inspiração
para expiração);
• permitir o esvaziamento do pulmão (fase expiratória);
• possuir mecanismo para iniciar a insuflação pulmonar (fase de troca da
expiração para inspiração).
Dessa forma, tem-se quatro fases no ciclo respiratório da ventilação por pressão
positiva, como mostra a figura 16.
Um ventilador mecânico possui uma série de botões no seu painel frontal, que
possibilitam controlar diretamente os parâmetros da ventilação mecânica, que são a
Pressão Inspiratória (PIP); Tempo Inspiratório (TI); Pressão Positiva no Final da
Expiração (PEEP); Tempo Expiratório (TE); Freqüência Respiratória (FR); Relação
Tempo Inspiratório/Tempo Expiratório (Relação I/E); Fluxo; Fração de Oxigênio
Inspirado (FiO2).
Pressão
Troca da fase inspiratória para
expiratória
Troca da fase expiratória para
inspiratória
Fase
Fase
Inspiratória
Expiratória
Tempo
Figura 16 - As fases do ciclo respiratório (DUPUIS, 1986)
76
A seguir, conforme o “Manual de Instruções do Respirador Artificial Inter3”
(INTERMED) e PIVA et al (1997) são descritos os parâmetros de um ventilador
mecânico.
• Pressão Inspiratória (PIP): cria um gradiente de pressão entre o início e o fim
da fase inspiratória da ventilação mecânica, determinando o movimento de
uma quantidade de gás para o interior do pulmão. Então, a PIP determina o
nível de máxima pressão durante a fase inspiratória, sendo medida em cm H2O.
• Tempo Inspiratório (TI): determina o tempo de inspiração de um ciclo
respiratório, sendo medido em segundos.
• Pressão Positiva no Final da Expiração (PEEP): consiste na manutenção de
uma pressão positiva nas vias aéreas durante a fase expiratória, de forma a
impedir um esvaziamento completo dos alvéolos. Então, a PEEP determina o
nível de pressão durante a fase expiratória, sendo medida em cm H2O.
• Tempo Expiratório (TE): indica que o respirador está na fase expiratória,
mantendo a pressão ajustada em PEEP, o TE é medido em segundos.
• Freqüência Respiratória (FR): determina a freqüência dos ciclos
respiratórios, sendo medida em respirações por minuto (RPM).
• Relação Tempo Inspiratório/Tempo Expiratório (Relação I/E): informa a
proporção entre a inspiração e a expiração dentro do ciclo respiratório, sem
informar os tempos inspiratório ou expiratório. A relação I/E é calculada em
função do TI e da FR programados. Sendo a relação apresentada da seguinte
forma: I/E = 1 : TE/TI
• Fluxo: o fluxômetro possibilita o ajuste do fluxo contínuo utilizado durante a
ventilação, liberando um fluxo gasoso por minuto.
77
• Fração de Oxigênio Inspirado (FiO2): a válvula que mistura oxigênio e ar
comprimido, permite o ajuste da FiO2 utilizada na ventilação mecânica.
A realização do estudo sobre ventiladores mecânicos, baseou-se no Inter3 que é
um respirador eletrônico microprocessado, de fluxo contínuo, ciclado a tempo e
limitado a pressão, usado em pacientes neonatais e pediátricos. Na figura 17, tem-se o
painel frontal do respirador.
Figura 17 - Painel frontal do respirador neonatal e pediátrico Inter3 (INTERMED)
7.2.4 Causas de Falência Respiratória e Indicações para Ventilação
Embora se tenha várias razões para iniciar a assistência respiratória em neonatos,
a causa mais comum é a falência respiratória. Em qualquer criança, esta condição pode
ser de duas formas. A primeira é a apnéia, sendo a assistência respiratória necessária
porque o paciente não consegue respirar sozinho. O pulmão pode ser normal e a
etiologia é mais freqüentemente relacionada ao controle da respiração pelo sistema
nervoso central. Exemplos são: apnéia de prematuros, hemorragia intracranial e
overdose de drogas (GOLDSMITH & KAROTKIN, 1988).
Na segunda forma de falência respiratória, o mecanismo da troca de gás pulmonar
foi comprometido. Freqüentemente a etiologia é uma doença pulmonar primária ou da
via aérea (por exemplo, Síndrome do Desconforto Respiratório). Nestas condições,
78
alterações fisiológicas na troca gasosa ocasionarão acidose, hipercapnia, e hipoxemia,
que necessitam de assistência respiratória para prevenir o dano ou morte do órgão
(ibidem).
A falência respiratória pode ser causada pela falha de órgãos diferentes do sistema
nervoso central e o pulmão. Porém, quando o pulmão é o principal responsável, é
importante fazer-se uma distinção entre dois tipos fisiológicos de doença pulmonar, as
quais são: atelectásica e obstrutiva (ibidem).
A doença atelectásica é caracterizada pela diminuição do volume pulmonar e da
capacidade residual funcional (FRC). Por exemplo: síndrome do desconforto
respiratório e pneumonia (ibidem).
A doença pulmonar obstrutiva é caracterizada pelo aumento do volume pulmonar
e da capacidade residual funcional, como por exemplo, na síndrome da aspiração
meconial e displasia broncopulmonar (ibidem).
A análise dos gases do sangue, gasometria arterial, também deve ser utilizada para
identificar pacientes sujeitos à assistência respiratória.
7.3 Gasometria Arterial
Desde o século passado é conhecida a existência de gases no sangue arterial,
sendo a primeira medida dos níveis gasosos arteriais realizada no início do século XX
por Joseph Barcroft. Inicialmente restringia-se a trabalhos experimentais, mas a partir
da década de 50 com a evolução do conhecimento tecnológico, por meio dos avanços no
desenvolvimento dos eletrodos de pH (íon hidrogênio), pO2 (Pressão Parcial de
Oxigênio) e pCO2 (Pressão Parcial do Dióxido de Carbono), os medidores de gases do
sangue foram desenvolvendo-se, sendo nos dias atuais possível conseguir uma análise
gasométrica em poucos minutos (CARVALHO et al, 1993).
79
A gasometria arterial constitui-se no exame laboratorial de maior importância no
acompanhamento de pacientes submetidos à assistência respiratória, que quando aliada
aos dados clínicos indicará a maneira mais adequada de realizar o suporte ventilatório.
A gasometria é um exame de sangue arterial que proporciona a análise dos gases
arteriais, dosando por exemplo, o pH do sangue, as pressões parciais de O2 e CO2 ,
HCO3, CO2 total, saturação de O2 e Basic Excess (BE) (ibidem).
De acordo com a análise dos resultados da gasometria arterial se realizam
alterações nos parâmetros da ventilação mecânica, obedecendo a um raciocínio
dinâmico e sendo complementado pelo estado clínico do paciente e a fisiopatologia da
doença básica, procurando-se manter os valores dos gases sangüíneos os mais próximos
possíveis dos padrões fisiológicos normais (ibidem).
7.4 Distúrbios Respiratórios em Neonatos
Os problemas respiratórios constituem-se em importante causa de mortalidade e
morbidade no recém-nascido (PIVA et al, 1998).
Os transtornos respiratórios do recém-nascido podem ser classificados em
diferentes tipos de problemas. Porém, aqui serão abordados apenas os distúrbios
respiratórios que constarão no trabalho, os quais são: Síndrome do Desconforto
Respiratório do Recém-Nascido; Síndrome da Aspiração de Mecônio; Apnéia Neonatal
e Displasia Broncopulmonar.
A Síndrome do Desconforto Respiratório do Recém-Nascido (SDR), é a principal
afecção pulmonar no período neonatal, caracterizada pela insuficiência respiratória
progressiva. Apesar dos casos fatais terem diminuído nos últimos anos, a SDR continua
sendo uma das maiores causas de mortalidade precoce. A SDR é resultante da
combinação de imaturidade anatômica, diminuição da quantidade de surfactante ativo,
presença de PCA (Persistência do Canal Arterial) e aumento do líquido intersticial e
pulmonar (CARVALHO et al, 1993).
80
A Síndrome da Aspiração de Mecônio (SAM) é uma complicação respiratória
relacionada com a asfixia perinatal, sendo uma das mais freqüentes. Constitui-se na
aspiração de líquido amniótico com mecônio nas primeiras incursões respiratórias
(PIVA et al, 1998).
A Apnéia Neonatal é um problema respiratório condicionado pela prematuridade
e adaptação neonatal, sendo uma ausência de fluxo aéreo durante um período, de pelo
menos 20 segundos, ou menor, se acompanhado de bradicardia e/ou cianose. Esse
distúrbio respiratório compromete especialmente o recém-nascido prematuro,
apresentando-se em aproximadamente 50% dos menores de 32 semanas de idade
gestacional (PIVA et al, 1998).
A Displasia Broncopulmonar (DBP) é caracterizada por alterações crônicas da
mecânica respiratória em crianças que foram submetidas à ventilação mecânica e
oxigenoterapia no período neonatal. A DBP reflete um comprometimento grave na
morfologia pulmonar (PIVA et al, 1998).
O sistema SARE, foi desenvolvido baseando-se no modelo Inter 3 de respirador
neonatal e pediátrico. Os dados referentes a gasometria arterial são uma das entradas do
sistema, já que as alterações realizadas no ventilador mecânico dependem diretamente
da análise dos gases do sangue. No SARE, se trabalha apenas com afecções
respiratórias, ou seja, Síndrome do Desconforto Respiratório do Recém-Nascido;
Síndrome da Aspiração de Mecônio; Apnéia Neonatal e Displasia Broncopulmonar, as
quais foram abordadas anteriormente.
CAPÍTULO 8
DESENVOLVIMENTO DE UM SISTEMA DIFUSO DE CONTROLE
DA ASSISTÊNCIA RESPIRATÓRIA EM NEONATOS
A pesquisa realizada consistiu no estudo da abordagem de conjuntos difusos em
sistemas inteligentes, desenvolvendo-se uma aplicação para a área médica, que tem
como domínio principal a assistência respiratória em neonatos. O protótipo do sistema
difuso de controle da assistência respiratória, denominado de SARE, não é um indicador
para a submissão de um paciente à ventilação mecânica, mas sim um sistema capaz de
auxiliar o médico intensivista pediátrico na manutenção e monitorização de recémnascidos quando acometidos de falhas respiratórias.
O SARE foi desenvolvido no ambiente de programação Delphi 5.0, sendo as
etapas referentes ao raciocínio difuso, como fuzificação, avaliação das regras e
defuzificação implementadas (Figura 18).
Entradas Crisp
Funções de
Pertinência
Fuzificação
de Entrada
Entradas Fuzzy
Regras
Avaliação das Regras
Saídas Fuzzy
Funções de
Pertinência
Defuzificação
de Saída
Saídas Crisp
Figura 18 - Etapas da implementação de um sistema fuzzy
82
O desenvolvimento do SARE compreendeu as etapas de metodológicas de
aquisição do conhecimento; modelagem do problema; desenvolvimento e avaliação do
sistema, as quais serão abordadas a seguir.
8.1 Aquisição do Conhecimento
O processo de aquisição do conhecimento foi realizado por meio de entrevistas
com o especialista do domínio de aplicação, o Médico Pediatra Edson Carvalho de
Souza.
O conhecimento adquirido consiste nas informações acerca da gasometria arterial
e das alterações de parâmetros do ventilador mecânico, bem como a definição das
variáveis que seriam utilizadas e das regras SE-ENTÃO (foram determinadas nove
regras pelo especialista – Anexo 1). Nesta etapa, conseguiu-se compreender o raciocínio
seguido pelo especialista ao realizar ajustes no ventilador mecânico.
As variáveis definidas como entrada do sistema são relativas a gasometria arterial
que compreende o pO2 (Pressão Parcial de Oxigênio) e pCO2 (Pressão Parcial do
Dióxido de Carbono). A inferência do sistema inicia-se sobre essas variáveis e realizase análise dos dados para determinar os parâmetros corretos a serem alterados no
ventilador mecânico.
As variáveis de saída definidas englobam os parâmetros do ventilador mecânico,
como a Pressão Inspiratória (PIP), Pressão Positiva no Final da Expiração (PEEP),
Tempo Inspiratório (TI), Tempo Expiratório (TE), Freqüência Respiratória (FR),
Relação Inspiratória/Expiratória (Relação I/E) e Fração de O2 Inspirado (FiO2).
Após a etapa de aquisição do conhecimento, selecionou-se a técnica de
inteligência artificial mais adequada para a representação do conhecimento, no caso do
SARE, utilizou-se a abordagem de conjuntos difusos, já que ela permite a modelagem e
tratamento da imprecisão de forma adequada.
83
8.2 Modelagem Difusa do Problema
Esta etapa consistiu na modelagem difusa do problema, no que se refere aos dados
coletados com o especialista, para formar a base de conhecimento.
A modelagem difusa do sistema SARE englobou as etapas referentes ao
desenvolvimento de sistemas fuzzy, realizando-se a fuzificação das variáveis, inferência
fuzzy e defuzificação.
8.2.1 Fuzificação das Variáveis
A fuzificação das variáveis compreendeu a transformação das entradas crisp em
entradas fuzzy, para isso calculou-se as funções de pertinência de entrada.
No caso do SARE, as funções de pertinência foram calculadas por meio da função
S, porque a sua forma não linear possibilita que seja assumido um espectro de valores
com grau de pertinência 1, e não apenas um valor, podendo assim, minimizar as
inconsistências e definir as funções de pertinência de uma forma mais aproximada do
raciocínio difuso, já que mudanças abruptas de conjuntos são evitadas.
A função S é definida por:
S (x; α; β; γ) =
0
para x < α
2 . ((x – α)/(γ – α))2
para α ≤ x ≤ β
1 – 2 (( x – γ)/(γ – α))2
para β < x ≤ γ
1
para x > γ
84
Onde:
α; β; γ são parâmetros que podem ser ajustados para adequar os dados de
pertinência desejados permitindo que a base de conhecimento seja adaptada a
interpretação de um outro especialista. Deve-se saber que:
• α é o ponto cujo grau de pertinência é 0.0
• β é o ponto cujo grau de pertinência é 0.5
• γ é o ponto cujo grau de pertinência é 1.0
A seguir, tem-se o cálculo das funções de pertinência para as variáveis de entrada
crisp do sistema SARE. Na realização da fuzificação se deve ter claro quais são os
limites das variáveis.
8.2.1.1 Funções de Pertinência da pO2
As funções de pertinência calculadas para a variável pO2 foram definidas dentro
do limite que compreende de 0 a 110, sendo formada pelos conjuntos baixo, normal e
alto.
• BAIXO: α = 50; β = 45; γ = 40.
S = 0 para x > α
S = 0 para x > 50
S = 1 para x < γ
S = 1 para x < 40
S = 1 – 2 ((x – γ)/(γ – α))2 para γ ≤ x ≤ β
S = 1 – 2 ((x – 40)/(40 – 50))2 para 40 ≤ x ≤ 45
S = 2 ((x – α)/(γ – α)) 2 para β < x ≤ α
S = 2 ((x – 50)/(40 – 50)) 2 para 45 < x ≤ 50
85
• NORMAL: cálculo do lado esquerdo da curva α = 40; β = 45; γ = 50.
S = 0 para x < α
S = 0 para x < 40
S = 2 ((x – α)/(γ – α)) 2 para α ≤ x ≤ β
S = 2 ((x – 40)/(50 – 40)) 2 para 40 ≤ x ≤ 45
S = 1 – 2((x – γ)/ (γ – α)) 2 para β < x ≤ γ
S = 1 – 2((x – 50)/ (50 – 40)) 2 para 45 < x ≤ 50
S = 1 para γ < x ≤ a, onde a é o ponto γ do lado direito da curva
S = 1 para 50 < x ≤ 70
• NORMAL: cálculo do lado direito da curva α = 90; β = 80; γ = 70.
S = 0 para x > α
S = 0 para x > 90
S = 2 ((x – α)/(γ – α)) 2 para β < x ≤ α
S = 2 ((x – 90)/(70 – 90)) 2 para 80 < x ≤ 90
S = 1 – 2 ((x – γ)/(γ – α))2 para γ ≤ x ≤ β
S = 1 – 2((x – 70)/ (70 – 90)) 2 para 70 ≤ x ≤ 80
S = 1 para b < x < γ, onde b é o ponto γ do lado esquerdo da curva
S = 1 para 50 < x < 70
• ALTO: α = 70; β = 80; γ = 90.
S = 0 para x < α
S = 0 para x < 70
86
S = 2 ((x – α)/(γ – α)) 2 para α ≤ x ≤ β
S = 2 ((x – 70)/(90 – 70)) 2 para 70 ≤ x ≤ 80
S = 1 – 2((x – γ)/ (γ – α)) 2 para β < x ≤ γ
S = 1 – 2((x – 90)/ (90 – 70)) 2 para 80 < x ≤ 90
S = 1 para x > γ
S = 1 para x > 90
Mediante a aplicação destas definições da função S, realiza-se os cálculos para
descobrir qual o grau de pertinência de uma determinada entrada crisp. Por exemplo,
quando pO2 é 42 mmHg, calcula-se o grau de pertinência para este valor pertencer aos
três conjuntos fuzzy: baixo, normal e alto. Após a realização dos cálculos, para os três
conjuntos difusos da variável pO2, tem-se as curvas que podem ser visualizadas no
Gráfico 1.
Gráfico 1 - Funções de pertinência da pO2
PO2 - Funções de Pertinência
1,2
1
0,8
0,6
0,4
0,2
BAIXO
NORMAL
ALTO
106
99
92
85
78
71
64
57
50
43
36
29
22
15
8
1
0
87
8.2.1.2 Funções de Pertinência da pCO2
As funções de pertinência calculadas para a variável pCO2 foram definidas dentro
do limite que compreende de 0 a 100, sendo formada pelos conjuntos baixo, normal e
alto (Gráfico 2).
• BAIXO: α = 35; β = 27,5; γ = 20.
S = 0 para x > α
S = 0 para x > 35
S = 1 para x < γ
S = 1 para x < 20
S = 1 – 2 ((x – γ)/(γ – α))2 para γ ≤ x ≤ β
S = 1 – 2 ((x – 20)/(20 – 35))2 para 20 ≤ x ≤ 27,5
S = 2 ((x – α)/(γ – α)) 2 para β < x ≤ α
S = 2 ((x – 35)/(20 – 35)) 2 para 27,5 < x ≤ 35
• NORMAL: cálculo do lado esquerdo da curva α = 20; β = 27,5; γ = 35.
S = 0 para x < α
S = 0 para x < 20
S = 2 ((x – α)/(γ – α)) 2 para α ≤ x ≤ β
S = 2 ((x – 20)/(35 – 20)) 2 para 20 ≤ x ≤ 27,5
S = 1 – 2((x – γ)/ (γ – α)) 2 para β < x ≤ γ
S = 1 – 2((x – 35)/ (35 – 20)) 2 para 27,5 < x ≤ 35
S = 1 para γ < x ≤ a, onde a é o ponto γ do lado direito da curva
S = 1 para 35 < x ≤ 45
88
• NORMAL: cálculo do lado direito da curva α = 50; β = 47,5; γ = 45.
S = 0 para x > α
S = 0 para x > 50
S = 2 ((x – α)/(γ – α)) 2 para β < x ≤ α
S = 2 ((x – 50)/(45 – 50)) 2 para 47,5 < x ≤ 50
S = 1 – 2((x – γ)/ (γ – α)) 2 para γ < x ≤ β
S = 1 – 2((x – 45)/ (45 – 50)) 2 para 45 ≤ x ≤ 47,5
S = 1 para b < x < γ, onde b é o ponto γ do lado esquerdo da curva
S = 1 para 35 < x < 45
• ALTO: α = 45; β = 47,5; γ = 50.
S = 0 para x < α
S = 0 para x < 45
S = 2 ((x – α)/(γ – α)) 2 para α ≤ x ≤ β
S = 2 ((x – 45)/(50 – 45)) 2 para 45 ≤ x ≤ 47,5
S = 1 – 2((x – γ)/ (γ – α)) 2 para β < x ≤ γ
S = 1 – 2((x – 50)/ (50 – 45)) 2 para 47,5 < x ≤ 50
S = 1 para x > γ
S = 1 para x > 50
89
Gráfico 2 - Funções de pertinência do PCO2
PCO2 - Funções de Pertinência
1,2
1
0,8
0,6
0,4
0,2
BAIXO
NORMAL
94
10
0
88
82
76
70
64
58
52
47
41
35
29
24
18
12
6
0
0
ALTO
8.2.2 Inferência Fuzzy
Posterior a etapa de fuzificação, realizou-se a determinação das regras SEENTÃO, conforme processo de aquisição do conhecimento junto ao especialista. A base
de regras pode ser observada no Anexo I.
O antecedente da regra corresponde ao grau de pertinência calculado para a
variável durante o processo de fuzificação. Na etapa de avaliação das regras que
consiste em avaliar a relevância ou o grau de pertinência de cada antecedente da regra.
A relevância da regra é calculada com base nos valores dos antecedentes desta regra.
No desenvolvimento do SARE, realizou-se a avaliação das regras por meio do
cálculo das t-normas, ou seja, da intersecção fuzzy já que os antecedentes das regras
possuem o operador and (e). Dentre os vários tipos de t-normas existentes, decidiu-se
realizar uma abordagem comparativa de dois tipos de t-normas, no caso, o mínimo e o
produto algébrico. A escolha por eles deu-se em função de o mínimo ser considerado o
tipo padrão e o produto algébrico ser o que mais se assemelha ao padrão.
90
A intersecção padrão consiste em i(a,b) = min(a,b), enquanto o produto algébrico
é i(a,b) = a.b, onde a e b são os graus de pertinência dos antecedentes da regra
originados do processo de fuzificação.
Ao se realizar o estudo comparativo entre os dois tipos de t-normas, chegou-se a
conclusão que o produto algébrico é o que mais se aproxima do raciocínio do
especialista por ser mais restritivo, adaptando-se melhor ao problema modelado. Como
se pode observar nos gráficos 3 e 4.
• Antecendente regra 5: If pO2 alto and pCO2 normal
Por exemplo, considerando-se as situações da tabela 2 quando pO2 = 79 tem
grau de pertinência 0.4 ao conjunto alto e pCO2 = 27 tem grau de pertinência
0.43 ao conjunto normal, tem-se como resultado do mínimo, o grau de
pertinência para a regra de 0.4, enquanto para o produto algébrico tem-se 0.18.
Podendo-se observar isto no ponto 8 do gráfico 3.
Tabela 2 - Cálculo da t-norma - regra 5
Situação
1
2
3
4
5
6
7
8
9
10
PO2
42
17
46
41
47,5
42
44
79
89
73
PCO2
27
32
22
55
34
48
47,5
27
23
29
uPO2
0
0
0
0
0
0
0
0,405
0,995
0,045
uPCO2
0,435556
0,92
0,035556
0
0,991111
0,32
0,5
0,435556
0,08
0,68
MÍNIMO
0
0
0
0
0
0
0
0,405
0,08
0,045
PRODUTO ALGÉBRICO
0
0
0
0
0
0
0
0,17640018
0,0796
0,0306
91
Gráfico 3 - Intersecção fuzzy - regra 5
REGRA 5 (t-norma)
0,5
0,4
0,3
0,2
0,1
0
1
2
3
4
MÍNIMO
5
6
7
8
9
10
PRODUTO ALGÉBRICO
• Antecedente regra 8: If pO2 normal and pCO2 normal
Considerando-se a tabela 3, realizou-se para a regra 8 da base de regras
(Gráfico 4), processo semelhante ao realizado para o antecedente da regra 5,
bem como para as demais regras. Considerando-se a tabela 3, realizou-se para a
regra 8 da base de regras, bem como para as demais.
Para melhor compreensão do processo de inferência fuzzy por meio do produto
algébrico se tem, por exemplo, a regra 8:
If pO2 normal and pCO2 normal then
FiO2 manter and
FR manter and
TI manter and
PEEP manter and
PIP manter.
Onde:
pO2 = 79 µnormal = 0.59
pCO2 = 27 µnormal = 0.43
Produto algébrico = 0.59 * 0.43 = 0.25
Assim, o grau de pertinência das ações de saída da regra é 0.25.
92
Tabela 3 - Cálculo da t-norma – regra 8
Situação
1
2
3
4
5
6
7
8
9
10
PO2
42
17
46
41
47,5
42
44
79
89
73
PCO2
27
32
22
55
34
48
47,5
27
23
29
uPO2
0,08
0
0,68
0,02
0,875
0,08
0,32
0,595
0,05
0,955
MÍNIMO
0,08
0
0,035556
0
0,875
0,08
0,32
0,435556
0,05
0,68
uPCO2
0,435556
0,92
0,035556
0
0,991111
0,32
0,5
0,435556
0,08
0,68
PRODUTO ALGÉBRICO
0,034844448
0
0,024177808
0
0,867222213
0,0256
0,16
0,259155582
0,004
0,6494
Gráfico 4 - Intersecção fuzzy - regra 8
REGRA 8 (t-norma)
1
0,8
0,6
0,4
0,2
0
1
2
3
4
MÍNIMO
5
6
7
8
9
10
PRODUTO ALGÉBRICO
8.2.3 Defuzificação
O processo de defuzificação do sistema se iniciou com a definição das funções de
pertinência de saída, também por meio da função S, para as variáveis de saída FiO2, TI,
PIP, FR e PEEP.
Posteriormente, realizou-se a defuzificação das variáveis por meio do Método do
Centro de Gravidade, a fim de converter um conjunto difuso de saída do sistema em um
valor crisp correspondente aos ajustes nos parâmetros do ventilador mecânico. A
93
defuzificação foi realizada por meio do centro de gravidade em função de ser bastante
utilizado em pesquisas que envolvam raciocínio difuso, e também por gerar o ponto
central para cada função de pertinência de saída, o que possibilita o cálculo da média
ponderada destes pontos.
8.2.3.1 Funções de Pertinência da FiO2
As funções de pertinência calculadas para a variável FiO2 foram definidas dentro
do limite que compreende de 0 a 100, sendo formada pelos conjuntos aumentar, manter
e diminuir (Gráfico 5).
• AUMENTAR: α = 80; β = 65; γ = 50.
S = 0 para x > α
S = 0 para x > 80
S = 1 para x < γ
S = 1 para x < 50
S = 1 – 2 ((x – γ)/(γ – α))2 para γ ≤ x ≤ β
S = 1 – 2 ((x – 50)/(50 – 80))2 para 50 ≤ x ≤ 65
S = 2 ((x – α)/(γ – α)) 2 para β < x ≤ α
S = 2 ((x – 80)/(50 – 80)) 2 para 65 < x ≤ 80
• MANTER: cálculo do lado esquerdo da curva α = 50; β = 65; γ = 80.
S = 0 para x < α
S = 0 para x < 50
S = 2 ((x – α)/(γ – α)) 2 para α ≤ x ≤ β
S = 2 ((x – 50)/(80 – 50)) 2 para 50 ≤ x ≤ 65
94
S = 1 – 2((x – γ)/ (γ – α)) 2 para β < x ≤ γ
S = 1 – 2((x – 80)/ (80 – 50)) 2 para 65 < x ≤ 80
S = 1 para γ < x ≤ a, onde a é o ponto γ do lado direito da curva
S = 1 para 80 < x ≤ 90
• MANTER: cálculo do lado direito da curva α = 100; β = 95; γ = 90.
S = 0 para x > α
S = 0 para x > 100
S = 2 ((x – α)/(γ – α)) 2 para β < x ≤ α
S = 2 ((x – 100)/(90 – 100)) 2 para 95 < x ≤ 100
S = 1 – 2((x – γ)/ (γ – α)) 2 para γ < x ≤ β
S = 1 – 2((x – 90)/ (90 – 100)) 2 para 90 ≤ x ≤ 95
S = 1 para b < x < γ, onde b é o ponto γ do lado esquerdo da curva
S = 1 para 80 < x < 90
• DIMINUIR: α = 90; β = 95; γ = 100.
S = 0 para x < α
S = 0 para x < 90
S = 2 ((x – α)/(γ – α)) 2 para α ≤ x ≤ β
S = 2 ((x – 90)/(100 – 90)) 2 para 90 ≤ x ≤ 95
S = 1 – 2((x – γ)/ (γ – α)) 2 para β < x ≤ γ
S = 1 – 2((x – 100)/ (100 – 90)) 2 para 95 < x ≤ 100
S = 1 para x > γ
S = 1 para x > 100
95
Gráfico 5 - Funções de pertinência da FiO2
FiO2 - Funções de Pertinência
1,2
1
0,8
0,6
0,4
0,2
AUMENTAR
MANTER
97
91
85
79
73
67
61
55
49
43
37
31
25
19
13
7
1
0
DIMINUIR
Durante todo o processo de definição das funções de pertinência de saída o
raciocínio foi semelhante, portanto, a seguir, pode-se visualizar as curvas das funções de
pertinência das demais variáveis, como do TI (Gráfico 6); PIP (Gráfico 7); FR (Gráfico
8) e PEEP (Gráfico 9).
Gráfico 6 - Funções de pertinência do TI
TI - Funções de Pertinência
1,2
1
0,8
0,6
0,4
0,2
AUMENTAR
MANTER
DIMINUIR
2,
8
2,
6
2,
4
2,
2
2,
0
1,
8
1,
6
1,
4
1,
2
1,
0
0,
8
0,
6
0,
4
0,
25
0,
1
0
96
Gráfico 7 - Funções de pertinência da PIP
PIP - Funções de Pertinência
1,2
1
0,8
0,6
0,4
0,2
AUMENTAR
MANTER
69
65
61
57
53
49
45
41
37
33
29
25
21
17
9
13
5
1
0
DIMINUIR
Gráfico 8 - Funções de pertinência da FR
FR - Funções de Pertinência
1,2
1
0,8
0,6
0,4
0,2
AUMENTAR
MANTER
97
91
85
79
73
67
61
55
49
43
37
31
25
19
13
7
1
0
DIMINUIR
Gráfico 9 - Funções de pertinência da PEEP
PEEP - Funções de Pertinência
1,2
1
0,8
0,6
0,4
0,2
0
0
1
1,5
2
3
AUMENTAR
4
5
6
MANTER
7
8
8,5
DIMINUIR
9
10
97
8.2.3.2 Defuzificação pelo Método do Centro de Gravidade
A realização da defuzificação ocorre somente após se ter calculado as funções de
pertinência de saída e as t-normas, pois serão necessárias para a realização do processo.
A seguir, tem-se um exemplo de defuzificação realizada. No caso, por exemplo,
de pO2=42
e
pCO2=27,
as
regras
com
grau
de
diferente de zero, disparadas são:
Regra 1: µregra1 = 0,5192885 (pela t-norma produto algébrico)
If pO2 baixo and pCO2 baixo then
FiO2 aumentar and
FR diminuir and
TI aumentar and
PEEP aumentar and
PIP aumentar.
Regra 2: µregra2= 0,40071152 (pela t-norma produto algébrico)
If pO2 baixo and pCO2 normal then
FiO2 aumentar and
FR manter and
TI aumentar and
PEEP aumentar and
PIP aumentar.
Regra 7: µregra7= 0,04515552 (pela t-norma produto algébrico)
If pO2 normal and pCO2 baixo then
FiO2 manter and
FR diminuir and
TI manter and
PEEP manter and
PIP diminuir.
pertinência
98
Regra 8: µregra8= 0,034844448 (pela t-norma produto algébrico)
If pO2 normal and pCO2 normal then
FiO2 manter and
FR manter and
TI manter and
PEEP manter and
PIP manter.
Dessas quatro regras, a defuzificação ocorre com as de maior grau de pertinência,
ou seja, regra 1 e regra 7. A saída fuzzy é determinada pela comparação de todas as
regras que especificam o mesmo conseqüente, ou seja, ação de saída. Tendo-se que
calcular:
Para a regra 1:
• O valor do ponto x, quando µregra1=0,5192885, por meio da função (função S)
aplicada na fuzificação do conjunto de saída, por exemplo PEEP (conjunto
aumentar).
S = 1 – 2 . ((x – γ )/(γ – x))2 para γ ≤ x ≤ β
S = 1 – 2 . ((x – 0)/(0 – 3))2 para 0 ≤ x ≤ 1,5
0,51928885 = 1 – 2 . (x / -3) 2
0,51928885 . 9 = 9 – 2x2
2x2 – 4,3264035 = 0
x= ±
2,16320175
x ≅ 1,4707827
99
• Área da figura formada:
Aquadrado = a . b
Atriângulo = (a .b)/2
Aquadrado = 1,4707827 . 0,5192885
Atriângulo= (1,5292173 . 0,5192885)/2
Aquadrado ≅ 0,763760542
Atriângulo ≅ 0,397052479
A1 = Aquadrado + Atriângulo
Aregra1 ≅ 1,160813021
• Centro de gravidade:
CGquadrado = x/2
CGtriângulo = x/3
CGquadrado = 1,4707827/2
CGtriângulo = 1,5292173/3
CGquadrado ≅ 0,73539135
CGtriângulo ≅ 0,5097391 + 1,4707827
CGtriângulo ≅ 1,9805218
CG = ((Aquadrado . CGquadrado) + (Atriângulo . CGtriângulo))/( Aquadrado + Atriângulo)
CG r1 ≅ 1,161284343
Para a regra 7:
• O valor dos pontos x1 e x2, quando µregra7 = 0,04515552, por meio da função
(função S) aplicada na fuzificação do conjunto de saída, como na regra 1, PEEP
(conjunto manter).
- lado esquerdo da função = x1
S = 2 . ((x – α)/(γ – α))2 para α < x ≤ β
S = 2. ((x –0)/(3 – 0)) 2 para 0 ≤ x ≤ 1,5
0,04515552 = 2 . (x/3) 2
2x2 – 0,40639968 = 0
x ≅ 0,4507769 ≅ x1
100
- lado direito da função = x2
S = 2 . ((x – α)/(γ – α))2 para β < x ≤ α
S = 2. ((x – 10)/(7 – 10)) 2 para 8,5 < x ≤ 10
0,04515552 = 2 . ((x – 10)/-3) 2
0,04515552 = 2 . (x2 – 2 . x . 10 + (10)2)/9
0,04515552 = 2 . (x2 – 20x +100)/9
2x2 – 40x – 199,59360032 = 0
x’ = (40 +
((-40)2– 4 . 2 . 199,59360032))/2 . 2
x’ ≅ 10,4507771
x’’ = (40 –
((-40)2– 4 . 2 . 199,59360032))/2 . 2
x’’ ≅ 9,549222893 ≅ x2
O valor de x2 é 9, 55 pois está dentro do limite definido para o conjunto manter
(lado direito da curva) quando o µregra ≤ 0.5 , ou seja, para 8,5 < x ≤ 10.
• Área da figura formada:
Ar7 = (h . (b1 + b2))/2
b2 = x2 – x1
Ar7 = (0,04515552 . (10 + 9.5040674))/2
b2 ≅ 9,5040674
Ar7 ≅ 0,440358153
• Centro de gravidade:
CG = x/2
CG = 10/2
CG r7 ≅ 5
101
Finalizando-se o processo de defuzificação pelo método do centro de gravidade
tem-se:
µregra1= 0,5192885
Aregra1 ≅ 1,160813021
CG regra1 ≅ 1,161284343
µregra7= 0,04515552
Aregra7 ≅ 0,440358153
CG regra7 ≅ 5
Média Ponderada = ((Ar1 . CG r1) + (Ar7 . CG r7))/(Ar1 + Ar7)
Média Ponderada ≅ 2,217017648
Média Ponderada ≅ 2,22
De forma similar, o processo de defuzificação das demais variáveis de saída é
semelhante ao desenvolvido para o PEEP.
8.3 Desenvolvimento do SARE
O desenvolvimento do SARE consistiu na implementação das etapas referentes ao
desenvolvimento de sistemas especialistas difusos, calculadas anteriormente, para que
fosse possível implementar no ambiente de programação Delphi 5.0, utilizando-se as
variáveis consideradas e a base de conhecimento onde estão as regras SE-ENTÃO
determinadas pelo especialista.
O SARE é voltado para atender às necessidades dos médicos intensivistas
pediátricos, como também dos médicos residentes. Ele armazena informações do
paciente como os dados de identificação (nome, data de nascimento, nome da mãe e
número do prontuário), os antropométricos (peso, estatura) e a afecção respiratória
como também os parâmetros iniciais da ventilação e as alterações realizadas. Podendose imprimir essas informações para serem anexadas ao prontuário da criança.
O desenvolvimento da interface do sistema foi realizada de forma a possibilitar
um acesso fácil as informações e apresentando os dados necessários para o processo de
controle de um ventilador mecânico.
102
A seguir, tem-se algumas telas do sistema SARE.
A figura 19 mostra a tela com os dados de identificação como nome da criança e
da mãe, número do prontuário, data de nascimento; dados antropométricos (peso e
estatura) e a afecção respiratória que a criança apresenta.
Figura 19 - Tela dos dados pessoais
103
A tela referente a gasometria arterial solicita os valores da pO2, pCO2 e pH,
demonstra os respectivos gráficos, referentes a fuzificação (Figura 20).
Figura 20 - Tela do SARE de informações sobre a gasometria
Na figura 21, tem-se que dar entrada aos atuais valores que estão presentes no
ventilador mecânico, ou seja, aqueles valores com os quais se iniciou a assistência
respiratória. Nesta tela, também se geram os gráficos de cada um dos parâmetros.
Os parâmetros do ventilador mecânico, considerados no desenvolvimento do
SARE foram: Pressão Inspiratória (PIP), Pressão Positiva no Final da Expiração
(PEEP), Tempo Inspiratório (TI), Tempo Expiratório (TE), Freqüência Respiratória
(FR), Relação Inspiratória/Expiratória (Relação I/E) e Fração de O2 Inspirado (FiO2).
104
Figura 21 - Valores atuais no ventilador mecânico
Finalmente, tem-se a tela com as sugestões de alterações nos parâmetros do
ventilador mecânico, bem como a presença do botão raciocínio seguido, que acessa o
módulo de explicação que mostra as diretrizes de raciocínio do sistema (Figura 22).
O SARE foi desenvolvido no ambiente de programação Delphi, para trabalhar
em plataforma Windows, disponibilizadas em PC’s, tendo como requisitos mínimos
necessários um microcomputador Pentium 100 MHz, com 64 MB memória RAM.
105
Figura 22 - Tela de sugestões das alterações no ventilador mecânico
8.4 Avaliação do SARE
A avaliação qualitativa do SARE foi realizada por uma médica pediatra
neonatologista e pelo próprio especialista. Nas situações clínicas experimentadas o
sistema ofereceu, satisfatoriamente, as alterações de parâmetros a serem realizadas no
ventilador mecânico. O SARE trabalha com uma base de conhecimento adequada,
devendo porém serem realizados maiores refinamentos dessa base.
CAPÍTULO 9
CONCLUSÕES
Nesta pesquisa foi desenvolvido o protótipo de um sistema de controle dos
parâmetros da assistência respiratória em neonatos com base nos valores da gasometria
arterial, utilizando-se da abordagem de conjuntos difusos, a fim de auxiliar os
profissionais de saúde.
O SARE é um sistema computacional para auxiliar médicos pediatras no controle
dos parâmetros do ventilador mecânico, constituindo-se num meio de contribuir com a
terapia intensiva em pediatria.
O SARE pode futuramente constituir-se num aliado aos médicos pediatras
intensivistas na execução rotineira da tarefa de alteração nos parâmetros do ventilador,
podendo vir a ser usado ininterruptamente no apoio ao cuidado da criança internada,
desde que sejam realizados maiores refinamentos na base de conhecimento.
O SARE foi desenvolvido no ambiente de programação Delphi 5.0, para trabalhar
em plataforma Windows, disponibilizadas em PC’s. O sistema engloba dados de
identificação do paciente, da gasometria arterial e dos parâmetros atuais do ventilador
mecânico, retornando como saída os parâmetros do ventilador mecânico que devem ser
alterados.
Esta pesquisa mostra um caminho a ser seguido na área de inteligência artificial
médica, abordagem difusa, que pode trazer muitos benefícios tanto para os médicos
como para os pacientes, contribuindo-se para um maior aprofundamento do
conhecimento no processo de diagnóstico e tratamento de doenças, bem como para
controle de processos médicos.
Na Medicina é comum o médico utilizar classificações relativas a variáveis
clínicas, onde há um ponto de corte distinguindo duas classes adjacentes, ou ainda
utilizar variáveis lingüísticas no raciocínio clínico. Na aplicação realizada, observa-se a
107
presença de variáveis lingüísticas tais como: em relação ao pO2, pode-se classificá-lo
em baixo, normal e alto. Para realizar o ajuste nos parâmetros do ventilador mecânico
tanto os dados de gasometria quanto o próprio ajuste existe a presença de expressões
lingüísticas em todas as variáveis utilizadas no raciocínio clínico. Em domínios
similares ao aqui trabalhado, recomenda-se a aplicação de conjuntos difusos para
modelar a imprecisão presente.
O SARE como um sistema difuso voltado à área da saúde, constitui-se num
instrumento que demonstra a aplicabilidade das técnicas da inteligência artificial, neste
caso dos conjuntos fuzzy, que possibilitam uma adequada modelagem do raciocínio
médico com presença de imprecisão.
9.1 Trabalhos Futuros
Como trabalhos futuros na área de conjuntos difusos seria interessante ampliar o
estudo comparativo entre os diferentes tipos de t-normas, como também explorar outros
métodos de defuzificação. Além disso, pode-se realizar a validação quantitativa do
protótipo.
BIBLIOGRAFIA
BARRETO, J. A Topological Model for Qualitative Time. Proceedings: IASTED
Artificial Intelligence Application and Neural Networks, Zurich (Switzerland), p.
25-27, june, 1990.
BARRETO, J. Inteligência Artificial. Florianópolis: UFSC, 1997.
BASTOS, R. C. Avaliação de Desempenho de Sistemas Educacionais: Uma
Abordagem Utilizando Conjuntos Difusos. Tese de Doutorado. Curso de PósGraduação em Engenharia de Produção e Sistemas. Universidade Federal de Santa
Catarina, Florianópolis, 1994.
BELMONTE-SERRANO, M.; SIERRA, C.; LOPES, R. M. RENOIR: An Expert
System Using Fuzzy Logic for Rheumatology Diagnosis. International Journal of
Intelligent Systems, 9:11, p. 985 – 1000, 1994.
BINAGHI, E.; DE GIORGI, O.; MAGGI, G.; MOTTA, T.; RAMPINI, A. ComputerAssisted Diagnosis of PostMenopausal Osteoporosis Using a Fuzzy Expert System
Shell. Computers and Biomedical Research, 26:6, p. 498 – 516, 1993.
BITTENCOURT, G. Inteligência Artificial: Ferramentas e Teorias. Florianópolis:
Editora da UFSC, 2001.
BORGES, V. C.; ANDRADE, A. J.; LOPES, A. C. Desmame da Ventilação Mecânica.
Revista Brasileira de Clínica & Terapêutica, v. 25, setembro, 1999. (Disponível em
http://wwwmoreirajr.com.br/clinica/rct599/rctdesmane.html)
BRONZINO, J. D. The Biomedical Engineering Hand Book. USA: CRCPRESS,
IEEE Press, 1995.
BROOKSHEAR, J. G. Ciência da Computação: Uma Visão Abrangente. 5. ed. Porto
Alegre: Bookman, 2000.
109
CAJACURI, L. A. V. Sistema Simulador e de Treinamento da Ventilação Mecânica
Usando o Ventilador Pulmonar. Dissertação de Mestrado. Curso de Pós Graduação
em Engenharia Elétrica. Universidade Federal de Santa Catarina, Florianópolis, 1997.
CARVALHO, W. B.; FREDDI, N. A.; HISCHHEIMER, M. R. et al. Ventilação
Pulmonar Mecânica, 1993.
COIERA, E. W. Guide to Medical Informatics, the Internet and Telemedicine.
Chapman & Hall Medical, 1997. (Disponível em: http://www.coiera.com/aimd.htm)
COIERA, E. W. Inteligência Artificial na Medicina. Revista de Informática Médica,
v.1,
n.4,
julho/agosto,
1998.
(Disponível
em:
http://www.epub.org.br/informaticamedican0104/coiera.html).
COMROE, J. Physiology the Respiration: An Introduction Text. 2. ed. Chicago: Year
Book Medical Publisher Incorporated, 1975.
CUER, A. O.; HIRABARA, L. Y. Sistemas Especialistas Aplicados à Medicina,
1997. (Disponível em http://www.din.uem.br/ia/especialistas/).
DUBOIS, D.; PRADE, H. Fuzzy Sets and Systems Theory and Applications. New
York: Academic Press, 1980.
DUPUIS, Y. G. Ventilators, Theory and Clinical Application. C. V. Mosby
Company, 1986.
ELSON, R. B.; CONNELY, D. P. Computerized Decision Support Systems in Primary
Care. Medical Decision Making: Primary Care, v.22, n.2, p. 365-384, June, 1995.
ESPERANÇA, C. G. Estudo de Metodologias para Gerenciamento de Ventiladores
Pulmonares. Dissertação de Mestrado. Curso de Pós Graduação em Engenharia
Elétrica. Universidade Federal de Santa Catarina, Florianópolis, 1996.
110
FATHI TORBAGHAN, M.; MEYER, D. MEDUSA: A Fuzzy Expert System for
Medical Diagnosis of Acute Abdominal Pain. Methods of Information in Medicine,
33:5, p. 522 – 529, 1994.
FERNANDES, A. P. S. Sistema Especialista Difuso de Apoio ao Aprendizado do
Traumatismo Dento-Alveolar Utilizando Recursos Multimídia. Dissertação de
Mestrado. Curso de Pós-Graduação em Engenharia de Produção e Sistemas.
Universidade Federal de Santa Catarina, Florianópolis, 1997.
FERREIRA, J. A.; COSTA, E. T. Sistema de Apoio à Decisão Médica em
valvulopatias. Anais do XVII Congresso Brasileiro de Engenharia Biomédica ,
Florianópolis, 2000.
FISCHLER, M. A.; FIRSCHEIN, O. Intelligence and Computer: The Central Role of
Representation. Al Expert, December, 1986.
GOLDSMITH, J. P.; KAROTKIN, E. H. Assisted Ventilation of
the Neonate. Second Edition. Philadelphia: W. B. Saunders
Company, 1988.
GUPTA, M., KNOPF, G. K., IKIFORUK, P. N. Sinusoidal-Based Cognitive Mapping
Functions, Fuzzy Logic in Knowledge-Based Systems, Decision and Control, p. 6992, 1988.
GUPTA, M.; TSUKAMOTO, Y. Fuzzy Logic Controllers Perspective, Proceedings
Joint Automatic Control Conference, p. FA10-C, San Francisco, 1980.
GUYTON, A. Tratado de Fisiologia Médica. 8. ed. Rio de Janeiro: Guanabara
Koojan, 1993.
INTERMED. Manual de Instruções do Inter 3 – Respirador Neonatal e Pediátrico.
JACKSON, P. Introduction Expert Systems. Addison Wesley, 1991.
111
KLIR, G.; YUAN, B. Fuzzy Sets and Fuzzy Logic: Theory and Applications. EUA:
Prentice Hall, 1995.
KOEHLER, C. Uma Abordagem Probabilística para Sistemas Especialistas.
Dissertação de Mestrado. Curso de Pós Graduação em Ciências da Computação.
Universidade Federal de Santa Catarina, Florianópolis, 1998.
KOSKO, B. Fuzzy Thinking the New Science of Fuzzy Logic. New York, 1994.
LAPOLLI, F.R et al, Controle de Processos Utilizando Lógica Difusa: Aplicação a uma
Estação de Tratamento de Lodos Ativados, Anais 14º ENEGEP, v. 2, p. 655-660, 1994.
LEE, C. Fuzzy Logic in Control Systems: Fuzzy Logic
Controller – Part I. IEEE Transaction on Systems, Man and
Cibernetics, vol.20, nº 2, March/April 1990.
LESMO, L.; SAITTA, L.; TORASSO, P. Dealing With Uncertain Knowledge in
Medical Decision-Making: A Case Study in Hepatology. Artificial Intelligence in
Medicine, 1:3, p. 105 – 116, 1989.
LINARES, K. S. C. Sistema Especialista Nebuloso para Diagnóstico Médico.
Dissertação de Mestrado. Curso de Pós Graduação em Engenharia Elétrica.
Universidade Federal de Santa Catarina, Florianópolis, 1997.
LOPES, H. S. Analogia e Aprendizado Evolucionário: Aplicação em Diagnóstico
Clínico. Tese de Doutorado. Curso de Pós Graduação em Engenharia Elétrica.
Universidade Federal de Santa Catarina, Florianópolis, 1996.
MAUS, R; KEYES, J. Handbook of Expert Systems in Manufacturing. USA:
McGraw Hill, 1991.
112
MONTELLO, M. V. Sistema Especialista para Predição de Complicações
Cardiovasculares Integrado a um Sistema de Controle de Pacientes Portadores de
Diabetes Mellitus. Dissertação de Mestrado. Curso de Pós Graduação em Engenharia
Elétrica. Universidade Federal de Santa Catarina, Florianópolis, 1999.
MÜLLER, D. N. Introdução aos Conceitos de Inteligência Artificial, 1997.
(Disponível em http://www.ulbra.tche.br/~danielnm/).
OJEDA, R. G. Técnicas de Inteligência Artificial Aplicadas ao Apoio à Decisão
Médica na Especialidade de Anestesiologia. Tese de Doutorado. Curso de Pós
Graduação em Engenharia Elétrica. Universidade Federal de Santa Catarina,
Florianópolis, 1992.
PEARL, J. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible
Inference. San Mateo: Morgan Kaufmann Publishers, 1988.
PEDRYCZ, W. Fuzzy Control and Fuzzy Systems. Canadá: LTD Winnipeg, 1988.
PEREIRA, V. A.; DOTTO, F. R. L. Fuzzy Logic Page, 2000. (Disponível em:
http://www.geocities.com/Athens/crete/2647/indexp.html).
PEREZ, R. L. C.; CAJACURI, L. V.; QUEVEDO, A. A. F. Controlador Adaptativo
Neurofuzzy para Geração da Marcha Via Estimulação Elétrica. Anais do XVII
Congresso Brasileiro de Engenharia Biomédica , Florianópolis, 2000.
PILZ, U. Structure and Basic Functional Mode of the FLORIDA Expert System for
Intensive Medicine. Elektrie, 49:10-12, p. 399 – 406, 1995.
PINO, A. V. Identificação da Mecânica Respiratória e Controle da PEEP Durante
Ventilação Mecânica: Simulação. Dissertação de Mestrado. Engenharia Biomédica.
Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1997.
113
PIVA,
J.
P.,
CARVALHO,
P.
R.
A.,
GARCIA,
P.C.
Terapia
Intensiva em Pediatria, 4. ed. Rio de Janeiro: Médica e
Científica Ltda, 1997.
POLYA, G. Mathematics and Plausible Reasoning Induction and Analogy in
Mathematics. New Jersey: Princenton University Press, 1990.
POZO, A. T. R. Um Sistema de Ensino Inteligente, Via Sociedade de Multi-Agentes,
Aplicado ao Diagnóstico de Epilepsia. Tese de Doutorado. Curso de Pós Graduação
em Engenharia Elétrica. Universidade Federal de Santa Catarina, Florianópolis, 1996.
RABUSKE, R. A. Inteligência Artificial. Florianópolis: UFSC, 1995.
RÉ, A. M. Sistemas Conexionistas Adaptativos Aplicados a
Problemas de Controle de Tráfego Urbano. Dissertação de
Mestrado, Curso de Pós-Graduação em Ciência da Computação,
Universidade Federal de Santa Catarina, Florianópolis,
1995.
REIS, L. A.; CARGNIN, M. L. Raciocínio Baseado em Casos. Trabalho de Conclusão
de Curso em Ciências da Computação. Universidade Federal de Santa Catarina,
Florianópolis, 1997.
RICH, E., KNIGHT, K. Inteligência Artificial. São Paulo:
Makron Books, 1993.
ROSS, T. J. Fuzzy Logic with Engineering Applications. McGraw-Hill, 1995.
SABBATINI, R. M.E. Uso do Computador no Apoio ao
Diagnóstico Médico, Revista Informédica, 1(1):5-11, 1993.
SCHWARTZ, W. B. Medicine and the Computer: The promise and Problems of
Change. NengeJMed, 1970.
114
SILVA, L. R.; NOHAMA, P. Controle de Eletroestimulador em Malha Fechada e
Simulação de Resposta Muscular Utilizando Lógica Fuzzy. Anais do XVII Congresso
Brasileiro de Engenharia Biomédica , Florianópolis, 2000.
SIMÕES, P. W. T. A SACI – Sistema de Apoio na Avaliação de Distúrbios do
Crescimento Infantil. Dissertação de Mestrado, Curso de Pós-Graduação em Ciência
da Computação, Universidade Federal de Santa Catarina, Florianópolis, 2001.
SOUZA, E. C. Um Sistema Especialista de Apoio à Nutrição Parenteral em RecémNascidos – SANPANEO. Dissertação de Mestrado, Curso de Pós-Graduação em
Ciências Médicas, Universidade Federal de Santa Catarina, Florianópolis, 1999.
STEIMANN, F,; ADLASSNIG, K. P. Fuzzy Medical Diagnosis, Handbook of Fuzzy
Computation. IOP Publishing, 1988.
VIOT, G. Fuzzy Logic in C, Dr. Dodd’s Journal, February, 1993.
WANG, L. X. A Course in Fuzzy Systems and Control. Hong
Kong: Prentice Hall International Editions, University of
Science & Tecnology, 1997.
WIDMAN, L. E. Sistemas Especialistas em Medicina. Revista Informática Médica,
v.1, n.5, p. 14-15, setembro/outubro, 1998.
WONG, W. S. F.; LEUNG, K. S.; SO, Y. T. The Recent Development and Evaluation
of a Medical Expert System (ABVAB). International Journal of Bio-Medical
Computing, 25:2-3, p. 223 – 229, 1990.
ZADEH, L. Fuzzy Sets. Information and Control, v.8, p. 338-353, 1965.
ZADEH, L. Fuzzy Sets as a Basis for a Theory of possibility. Fuzzy Sets and Systems,
v.1, p. 3-28, 1978.
GLOSSÁRIO
APNÉIA – ausência de respiração.
BRADICARDIA – freqüência cardíaca baixa.
CIANOSE – coloração roxo-azulada da pele.
HIPERCAPNIA – excesso de dióxido de carbono sangüíneo.
HIPOXEMIA – diminuição do oxigênio no sangue.
OXIGENOTERAPIA – é a administração de oxigênio em quantidade suficiente para
que a pressão parcial de oxigênio (pO2) e a saturação da hemoglobina se mantenham
dentro do normal. No entanto, o objetivo final é que o oxigênio atinja os tecidos, o
suficiente para atender as necessidades metabólicas.
APÊNDICE I
BASE DE REGRAS DO SARE
IF PO2 BAIXO AND PCO2 BAIXO THEN FIO2 AUMENTAR AND FR DIMINUIR
AND TI AUMENTAR AND PEEP AUMENTAR AND PIP AUMENTAR
IF PO2 BAIXO AND PCO2 NORMAL THEN FIO2 AUMENTAR AND FR
MANTER AND TI AUMENTAR AND PEEP AUMENTAR AND PIP AUMENTAR
IF PO2 BAIXO AND PCO2 ALTO THEN FIO2 AUMENTAR AND FR AUMENTAR
AND TI AUMENTAR AND PEEP AUMENTAR AND PIP AUMENTAR
IF PO2 ALTO AND PCO2 BAIXO THEN FIO2 DIMINUIR AND FR DIMINUIR
AND TI DIMINUIR AND PEEP DIMINUIR AND PIP DIMINUIR
IF PO2 ALTO AND PCO2 NORMAL THEN FIO2 DIMINUIR AND FR MANTER
AND TI DIMINUIR AND PEEP DIMINUIR AND PIP DIMINUIR
IF PO2 ALTO AND PCO2 ALTO THEN FIO2 DIMINUIR AND FR AUMENTAR
AND TI DIMINUIR AND PEEP DIMINUIR AND PIP MANTER
IF PO2 NORMAL AND PCO2 BAIXO THEN FIO2 MANTER AND FR DIMINUIR
AND TI MANTER AND PEEP MANTER AND PIP DIMINUIR
IF PO2 NORMAL AND PCO2 NORMAL THEN FIO2 MANTER AND FR MANTER
AND TI MANTER AND PEEP MANTER AND PIP MANTER
IF PO2 NORMAL AND PCO2 ALTO THEN FIO2 MANTER AND FR AUMENTAR
AND TI MANTER AND PEEP MANTER AND PIP AUMENTAR
Baixar