0
UNIVERSIDADE ESTADUAL DE GOIÁS
UNIDADE UNIVERSITÁRIA DE JUSSARA
LICENCIATURA EM MATEMÁTICA
SINÉSIO MATEUS DA SILVA FILHO
INTEGRAIS DUPLAS E APLICAÇÕES
JUSSARA-GO
2009
1
Sinésio Mateus Da Silva Filho
INTEGRAIS DUPLAS E APLICAÇÕES
Trabalho apresentado como requisito para obtenção do
título de licenciado no curso de Licenciatura em
Matemática, na Universidade Estadual de Goiás,
Unidade Universitária de Jussara, sob orientação do
Professor José Eder Salvador De Vasconcelos.
JUSSARA-GO
2009
2
3
AGRADECIMENTOS
Em primeiro lugar, gostaria de agradecer a Deus, pois Ele é o Criador de tudo e este
trabalho não se realizaria sem a sua permissão, me dando paz e sabedoria para superar os
momentos de dificuldade.
Aos meus professores que muito me ensinaram ao longo da minha vida acadêmica, em
especial ao Ms. Márcio Lemes De Sousa e ao Ms. Elber Magalhães Torres, que contribuíram
exponencialmente na minha graduação.
Agradeço à direção e aos colegas do Colégio Estadual Alfredo Nasser, de BritâniaGO, por terem compreendido minhas ausências, e pelo apoio incondicional na realização
deste trabalho.
Ao professor José Eder Salvador De Vasconcelos por ter aceito o desafio de me
orientar ao longo deste trabalho, me acolhendo carinhosamente e me incentivando na sua
realização.
Agradeço a minha namorada por ter me ajudado a superar essa fase tão difícil da
minha vida, me dando motivação e carinho para seguir em frente. Nunca se esqueça meu
amor que eu te amo muito e que parte desta obra prima é sua, pois sem você eu não teria chão
para realizá-la.
Como não poderia deixar de ser, agradeço aos meus pais por terem acreditado e
investido em mim, pela compreensão e carinho incondicionais, fatores fundamentais para que
este trabalho fosse concluído. A todos que contribuíram direto ou indiretamente para a
conclusão desta pesquisa o meu muito obrigado.
4
RESUMO
Há muito tempo os matemáticos buscam ferramentas para resolver problemas do nosso dia-adia, entre essas podemos destacar a Integral Dupla. Por meio dela é possível resolver diversos
problemas como cálculo de áreas, volumes, massa, centro de massa, momento de inércia e
outros. Sendo assim torna-se indispensável para nós matemáticos a compreensão dessa
ferramenta e da sua aplicabilidade na Matemática, na Física, na Engenharia e em outras
ciências. Tem-se então por objetivos resgatar, desenvolver, e mostrar alguns conceitos
fundamentais de Integrais Duplas em funções de duas variáveis reais, por meio de
interpretações geométricas, algébricas e possíveis situações cotidianas de modo prático. Para
alcançá-los serão realizadas pesquisas bibliográficas e gráficas utilizando a ajuda de softwares
matemáticos.
5
SUMÁRIO
INTRODUÇÃO................................................................................................................... 6
CAPÍTULO 1 UM POUCO DE HISTÓRIA.................................................................... 7
1.1 A Origem do Cálculo......................................................................................................
7
1.2 Newton e Leibniz um duelo de titãs................................................................................
7
1.3 O cálculo integral...........................................................................................................
9
1.4 O cálculo Diferencial.....................................................................................................
10
CAPÍTULO 2 INTEGRAL DUPLA DA TEORIA À PRÁTICA..................................
12
2.1 A Integral Dupla.............................................................................................................
12
2.2 Integrais Sucessivas........................................................................................................ 16
2.3 Mudança de variáveis nas integrais duplas...................................................................
24
2.4 Coordenadas Polares.....................................................................................................
27
CAPÍTULO 3 APLICAÇÕES DE INTEGRAIS DUPLAS............................................
31
3.1 Cálculo de volume..........................................................................................................
31
3.2 Cálculo de área............................................................................................................... 34
3.3 Massa..............................................................................................................................
36
3.4 Carga..............................................................................................................................
38
3.5 Centro de massa.............................................................................................................
39
3.6 Momento de inércia........................................................................................................
42
CONSIDERAÇÕES FINAIS.............................................................................................
45
REFERÊNCIAS BIBLIOGRÁFICAS.............................................................................
46
6
INTRODUÇÃO
Ao longo dos séculos os seres humanos buscam meios para promover o seu
desenvolvimento científico, uma das maiores descobertas foi a do cálculo diferencial e
integral criado por Newton e Leibniz. Através desta descoberta surgiram várias ferramentas
que contribuíram e muito para solucionar problemas do nosso dia-a-dia que até então não
possuíam respostas.
Entre essas ferramentas podemos destacar a integral dupla que surge a partir da
extensão dos conceitos e propriedades de integral simples. No entanto, para muitos
matemáticos essa ferramenta apresenta um alto grau de complexidade e acaba sendo rotulada
como inútil.
Através da integral dupla vários problemas geométricos foram solucionados, entre eles
podemos citar com ênfase problemas de áreas e volumes. Outra grande contribuição da
integral dupla foi dada a Física, possibilitando a solução de problemas de massa, centro de
massa, momento de inércia, entre outros.
Esta pesquisa tem por objetivo geral desmistificar as dificuldades sobre conceitos
fundamentais de integrais duplas, avaliando de modo geral qual o melhor meio para fazer
interpretações geométricas e algébricas, mostrando situações cotidianas em que as integrais
duplas podem ser utilizadas de modo prático e funcional.
7
CAPÍTULO 1 UM POUCO DE HISTÓRIA
Neste
primeiro
capítulo
daremos
ênfase
à
parte
histórica,
mostrando
o
desenvolvimento do cálculo integral e diferencial ao longo da história, com o objetivo de
motivação para um estudo mais aprofundado de Integrais Duplas que é o foco da nossa
pesquisa. A história do cálculo faz-se muito importante para facilitar a compreensão dessa
área do conhecimento e através dela poderemos entender melhor o conceito de integral.
1.1 A Origem do Cálculo
De acordo com Howard Eves o século XVII foi muito produtivo para a matemática,
pois neste século surgiram novas áreas de pesquisas que abriram as portas para grandes
descobertas. Entre as descobertas realizadas neste período, destaca-se na opinião de muitos
como a mais notável, a invenção do cálculo, por Isaac Newton e Gottfried Wilhelm Leibniz.
Esta descoberta elevou a matemática a um plano superior e possibilitou a solução de
diversos problemas que ainda persistiam sem respostas. Em princípio o cálculo era ramificado
em duas áreas distintas, o cálculo integral e o cálculo diferencial, ambos um independente do
outro. Para Howard Eves o desenvolvimento do cálculo ao longo da história contraria a ordem
dos cursos básicos, onde estudamos primeiro o cálculo diferencial e depois o cálculo integral.
O surgimento histórico do cálculo aconteceu justamente ao contrário, pois primeiro
surgiu o cálculo integral que teve origem através de somatórios ligados ao cálculo de áreas,
volumes e comprimentos. E por conseguinte o cálculo diferencial que foi criado mais tarde e
resultou de problemas sobre tangentes e questões de máximos e mínimos. Anos mais tarde
verificou-se que o cálculo diferencial e o cálculo integral estão diretamente relacionados entre
si, pois se concluiu que a integração e a diferenciação são operações inversas uma da outra.
1.2 Newton e Leibniz: um duelo de titãs
8
Segundo Carl B. Boyer, Isaac Newton nasceu prematuramente e passou por várias
dificuldades familiares. Ele foi educado pela sua avó até seu tio perceber no sobrinho um
talento matemático incomum e convencer a sua mãe a matriculá-lo em Cambridge.
Em princípio, Isaac Newton não demonstrava interesse em se tornar um matemático,
pois desejava seguir seus estudos na área de química. Contudo, em 1661 ele ingressou no
Trinity College (instituição universitária) e logo no primeiro ano comprou e estudou as
principais obras matemáticas da época.
Três anos mais tarde Newton já havia adquirido muito conhecimento e estava pronto
para fazer a suas próprias contribuições a matemática. Em 1665 ele começou os seus estudos
sobre séries infinitas e taxa de variação, pouco tempo depois ele começou a ligar esses dois
problemas em busca de uma solução.
Durante boa parte de 1665-1666, o Trinity College foi fechado e Newton foi para casa,
onde se ocupou simplesmente em viver e pensar. Neste período ele realizou quatro das
maiores descobertas da sua vida: o teorema binomial, o cálculo, a lei da gravitação, a natureza
das cores.
O teorema binomial e o seu estudo de séries infinitas foram ferramentas
imprescindíveis para que Isaac Newton desenvolvesse o cálculo. Contudo ele se tornou
efetivo inventor do cálculo quando foi capaz de explorar a relação inversa entre inclinação e a
área através de sua nova análise infinita. Para ele o cálculo e a análise infinita estavam
inteiramente ligados e a sua separação não era vista com bons olhos.
Porém o cálculo de Newton apresentava-se muito complexo, pois poucos matemáticos
da época dominaram a nova análise nos termos de linguagem e notação criada por ele. Sabese também que ele não foi o primeiro matemático a diferenciar ou integrar e nem a ver a
relação entre essas operações no teorema fundamental do cálculo, mas ele foi o primeiro a
constituir uma aplicação desses elementos num algoritmo geral aplicável a todas as funções.
Newton em uma das suas publicações reconheceu que Leibniz estava de posse de um
método semelhante ao que tinha criado. Porém em 1726 em uma nova publicação, após uma
grande disputa entre ele e Leibniz pela a autoria do cálculo, ele omite a referência ao cálculo
de Leibniz. Atualmente está bastante claro que ambas as descobertas foram independentes e
que a de Leibniz aconteceu dez anos após a descoberta de Newton. Contudo, Leibniz tem
prioridade de publicação, pois imprimiu uma exposição do seu cálculo em 1684.
O barão Gottfried Wilhelm Leibniz nasceu em Leipzig, na Alemanha em 1º de julho
de 1646. Assim como Isaac Newton, Leibniz não começou seus estudos pela matemática, ele
9
preferiu estudar direito na Universidade de Leipzig no período de 1661 a 1666. Nesta fase
adquiriu muito conhecimento estudando as obras de diversos filósofos.
Após concluir o curso de direito Leibniz se candidatou ao doutorado na Universidade
de Leipzig, mas devido a sua pouca idade ele não foi aceito e decidiu abandonar a cidade de
Leipzig para sempre. Deu então início aos seus estudos matemáticos em Jena e saiu em
viagem pela Alemanha buscando conhecimentos e soluções para questões políticas, religiosas
e matemáticas, recebendo o título de doutor na cidade Nurnberg com a tese sobre “ Casos
Intrigantes”. A partir de 1672, Leibniz se vê em grandes dificuldades, pois os seus maiores
protetores vieram a falecer neste período. Buscando meios para se manter, Leibniz constrói
uma máquina de calcular, um aperfeiçoamento na máquina criada por Blaise Pascal,
matemático e cientista francês, e indo a Inglaterra, apresentou sua máquina de calcular a
Royal Society em 1673.
Em 1676, Leibniz já havia começado a desenvolver o seu cálculo e tinha descoberto o
teorema fundamental do cálculo, que só foi publicado em 11 de julho de 1677,
aproximadamente dez anos depois da descoberta não publicada por Newton. Entre 1677 a
1704, o cálculo leibniziano foi desenvolvido como uma real força e de grande aplicabilidade,
enquanto o cálculo de Newton continuava uma curiosidade não procurada pelos matemáticos
da época.
1.3 O cálculo integral
De acordo com Howard Eves os primeiros problemas que apareceram sobre integral
ao longo da história foram os de quadraturas. Um dos problemas mais antigo que o ser
humano enfrentou foi o de calcular a área de superfícies de figuras planas. A princípio os
geômetras usavam associar a área do quadrado para calcular a área de figuras planas mais
complexas, afim de encontrar um quadrado que tivesse a mesma área da figura em questão.
No entanto os geômetras da época encontravam muita dificuldade para encontrar a
área de figuras curvilíneas. Vários matemáticos se lançaram a este desafio através das
quadraturas. O geômetra que mais contribuiu para o cálculo integral foi Arquimedes com o
seu teorema da quadratura da parábola. Através deste teorema Arquimedes descobriu que a
área da região limitada por uma parábola cortada por qualquer corda, é igual a 4/3 da área do
10
triângulo que tem a mesma altura e a corda como base. Através das quadraturas do círculo,
Arquimedes encontrou a primeira aproximação para o número “pi”.
Outros matemáticos também contribuíram para o desenvolvimento do cálculo integral,
entre eles podemos destacar Fermat e Joham Bernoulli. Fermat desenvolveu a aritmética do
infinito, uma técnica que lhe permitia achar as áreas de cada uma das parábolas maiores.
O cálculo integral era visto separadamente por Newton e Leibniz. Para Newton o
cálculo era mais geométrico, já para Leibniz o cálculo era mais analítico. O nome de cálculo
integral foi criado por Joham Bernoulli e publicado pela primeira vez por seu irmão Jacques
Bernoulli. Após esta publicação Leonard Euller resumiu as ideias dos Bernoulli em uma nova
obra sobre integrais, dando continuidade no estudo das funções, ainda prematuro na época.
Hoje em dia o cálculo integral é utilizado em larga escala pelo ser humano em diversas
áreas do conhecimento e é aplicado para a solução de problemas não só de Matemática, mas
Física, Astronomia, Economia, Engenharia, Medicina e Química.
1.4 O cálculo diferencial
Segundo Carl B. Boyer o cálculo diferencial surgiu a partir do problema da tangente,
um dos primeiros matemáticos a desvendar este problema foi Fermat que através dos estudos
de funções se deu conta das limitações do conceito clássico de reta tangente. Sendo assim,
passou a buscar uma reformulação para tal conceito e procurou encontrar um processo para
traçar uma reta tangente a um gráfico num ponto dado.
Para resolver este problema Fermat usou um método muito simples, primeiramente
traçou uma reta PQ secante ao gráfico de uma curva nos pontos P e Q, em seguida fez o ponto
Q deslizar ao longo da curva até o ponto P, obtendo assim retas PQ que se aproximavam de
uma reta T. Essa reta T foi chamada por Fermat de reta tangente à curva no ponto P.
Através desta ideia Fermat tentou traçar a reta tangente em várias funções e notou que
nos pontos onde a curva assumia valores extremos, a tangente ao gráfico deveria ser uma reta
horizontal. Assim Fermat começou a criar uma relação entre o problema de determinar
extremos e de determinar tangentes.
As ideias mostradas por Fermat ajudaram a construir o conceito de derivada e levou
alguns matemáticos a considerá-lo o verdadeiro inventor do cálculo diferencial. Porém Fermat
11
não dispunha de notação apropriada e o conceito de limite ainda não estava claramente
definido.
Anos mais tarde Newton e Leibniz algebrizam o cálculo diferencial, introduzindo
vários conceitos e notações, o que possibilitou a sua utilização em diversas áreas do
conhecimento trazendo um grande desenvolvimento e soluções para problemas que até então
não possuíam respostas.
12
CAPÍTULO 2 INTEGRAL DUPLA DA TEORIA À PRÁTICA
Neste capítulo abordaremos as definições e propriedades da integral dupla, para isso,
assumiremos alguns pressupostos, entre eles podemos destacar a definição de função,
primitiva, integral de Riemann, continuidade, limite e o teorema fundamental do cálculo. A
partir desses pressupostos poderemos finalmente definir a integral dupla, que é o nosso
principal foco de pesquisa.
2.1 A Integral Dupla
De acordo com Flemming e Gonçalves a integral dupla é uma extensão natural do
conceito de integral definida para funções de duas variáveis reais. Essa extensão é obtida
através da expansão da soma Riemann de uma variável real, para duas variáveis reais.
Note que quando realizamos esta expansão, estamos mudando o conjunto de
integração. Quando integramos uma função de uma variável real, através do cálculo de uma
integral simples, exigimos que a função seja definida em um intervalo fechado no conjunto R
dos números reais. Já quando integramos uma integral dupla exigimos que ela seja definida
numa região fechada do R².
2.1.1 Definição
Seja f uma função definida numa região retangular fechada D. O número L será o
limite das somas da forma
𝑛
𝑖=1
𝑓(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 se L satisfazer a propriedade de que para todo 𝜖
> 0 existe δ > 0, tal que para toda partição 𝛥, para qual 𝛥 < δ e para todas as possíveis
seleções do ponto (𝜉i,𝛾i) no i-ésimo retângulo i = 1, 2, ... , n,
13
𝑛
𝑓(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 − 𝐿 < 𝜖
𝑖=1
Se tal número L existir, escrevemos
𝑛
lim
𝛥 →0
𝑓(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 = 𝐿
𝑖=1
Através desta definição podemos verificar que realmente o conceito de integral dupla
parte de uma expansão do conceito de integral simples. No conceito de integral simples temos
que a integral é o limite da soma de Riemann, onde somamos as áreas dos retângulos no
conjunto fechado R. Já no conceito de integral dupla temos que a integral também é o limite
da soma de Riemann, mas, no entanto, estamos trabalhando agora com duas variáveis reais,
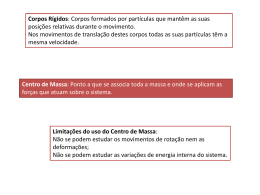
logo a integral dupla é a soma dos volumes dos paralelepípedos numa região fechada do R².
Observe a figura 1:
z
𝑓(𝜉𝑖, 𝛾𝑖)
Paralelepípedo
x
D
(𝜉𝑖, 𝛾𝑖).
y
Figura 1
“É fácil compreender, então, que a soma de Riemann é a soma dos volumes dos
paralelepípedos cujas bases são os sub-retângulos e cujas alturas correspondentes são os
valores de 𝑓(𝜉𝑖, 𝛾𝑖).”( ÁVILA, 1995, p.137)
2.1.2 Definição
14
Uma função f de duas variáveis será dita integrável numa região retangular fechada D
se f estiver definida em D e se o número L da Definição 1 existir. Esse número L será
chamado de Integral Dupla de f em D, e escrevemos
𝑛
lim
𝛥 →0
𝑓(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 =
𝑖=1
𝑓 𝑥, 𝑦 𝑑𝐴
𝐷
A integral dupla também pode ser representada usando outros símbolos, logo a
integral dupla de f em D pode ser escrita como:
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 e
𝐷
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥
𝐷
Ainda é muito cedo para realizarmos o cálculo de uma integral dupla, pois este
depende da função f e da região D em que se pretende calcular a integral. Sendo assim esta
tarefa pode se tornar muito complexa, logo se faz necessário um estudo minucioso de algumas
ferramentas e da própria integral dupla.
Como a definição de integral dupla é uma extensão da definição de integral simples,
podemos verificar também que todas as propriedades aplicadas às integrais simples também
poderão ser aplicadas aqui em integrais duplas. Logo sejam f (x,y) e g (x,y) duas funções
contínuas e integráveis sobre a região D do R² e k uma constante, valem as seguintes
propriedades:
I.
𝐷
𝑘 𝑓 𝑥, 𝑦 𝑑𝐴 = 𝑘
II.
𝐷
[𝑓 𝑥, 𝑦 ± 𝑔 𝑥, 𝑦 ]𝑑𝐴 =
𝑓 𝑥, 𝑦 𝑑𝐴
𝐷
𝑓 𝑥, 𝑦 𝑑𝐴 ±
𝐷
𝑔 𝑥, 𝑦 𝑑𝐴
Se 𝑓 𝑥, 𝑦 ≥ 𝑔 𝑥, 𝑦 , para todo 𝑥, 𝑦 ∈ 𝐷, então
III.
𝐷
𝐷
𝐷
𝑓 𝑥, 𝑦 𝑑𝐴 ≥
𝑔 𝑥, 𝑦 𝑑𝐴.
2.1.1 Demonstração
I.
Fazendo h(x,y) = k f(x,y) e usando a definição 2.1.2, segue que:
𝑛
𝑘 𝑓 𝑥, 𝑦 𝑑𝐴 =
𝐷
𝑥, 𝑦 𝑑𝐴 = lim
𝐷
como 𝜉𝑖, 𝛾𝑖 = 𝑘𝑓 𝜉𝑖, 𝛾𝑖 , logo:
𝛥 →0
(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴
𝑖=1
15
𝑛
𝑛
lim
𝛥 →0
𝑛
(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 = lim
𝛥 →0
𝑖=1
𝑘𝑓(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 = 𝑘 lim
𝛥 →0
𝑖=1
𝑓(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴
𝑖=1
𝑛
𝑘 lim
𝑓(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 = 𝑘
𝛥 →0
𝑖=1
𝑓 𝑥, 𝑦 𝑑𝐴
𝐷
Portanto temos que pra qualquer f(x,y) integrável e k constante numa região D do R²,
segue que :
𝑘 𝑓 𝑥, 𝑦 𝑑𝐴 = 𝑘
𝐷
𝑓 𝑥, 𝑦 𝑑𝐴
𝐷
Fazendo h(x,y) = f(x,y) ± g(x,y) e usando a definição 2.1.2, segue que:
II.
𝑛
[𝑓 𝑥, 𝑦 ± 𝑔 𝑥, 𝑦 ]𝑑𝐴 =
𝐷
𝑥, 𝑦 𝑑𝐴 = lim
𝛥 →0
𝐷
(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴
𝑖=1
Como 𝜉𝑖, 𝛾𝑖 = 𝑓 𝜉𝑖, 𝛾𝑖 ± 𝑔 𝜉𝑖, 𝛾𝑖 , logo:
𝑛
lim
𝛥 →0
𝑛
(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 = lim
𝛥 →0
𝑖=1
𝑛
lim
𝛥 →0
𝑓 𝜉𝑖, 𝛾𝑖 ± 𝑔 𝜉𝑖, 𝛾𝑖 𝛥𝑖𝐴
𝑖=1
𝑛
𝑓 𝜉𝑖, 𝛾𝑖 ± 𝑔 𝜉𝑖, 𝛾𝑖 𝛥𝑖𝐴 = lim
𝛥 →0
𝑖=1
𝑛
𝑓(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 ± lim
𝛥 →0
𝑖=1
𝑔(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴
𝑖=1
𝑛
lim
𝛥 →0
𝑛
𝑓(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 ± lim
𝛥 →0
𝑖=1
𝑔(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 =
𝑖=1
𝑓 𝑥, 𝑦 𝑑𝐴 ±
𝐷
𝑔 𝑥, 𝑦 𝑑𝐴
𝐷
Portanto temos que pra qualquer f(x,y) e g(x,y) integrável numa região D do R², segue
que :
[𝑓 𝑥, 𝑦 ± 𝑔 𝑥, 𝑦 ]𝑑𝐴 =
𝐷
III.
𝑓 𝑥, 𝑦 𝑑𝐴 ±
𝐷
𝑔 𝑥, 𝑦 𝑑𝐴
𝐷
Como f e g são integráveis na região D,
𝐷
𝑓 𝑥, 𝑦 𝑑𝐴 e
𝐷
𝑔 𝑥, 𝑦 𝑑𝐴 existem.
Logo,
𝑓 𝑥, 𝑦 𝑑𝐴 −
𝐷
𝑔 𝑥, 𝑦 𝑑𝐴 =
𝐷
[𝑓 𝑥, 𝑦 − 𝑔 𝑥, 𝑦 ]𝑑𝐴
𝐷
Seja h a função definida por
𝑥, 𝑦 = 𝑓 𝑥, 𝑦 − 𝑔 𝑥, 𝑦
Então 𝑥, 𝑦 ≥ 0 para todo (𝑥, 𝑦) em D, pois 𝑓 𝑥, 𝑦 ≥ 𝑔 𝑥, 𝑦 para todo (𝑥, 𝑦) em
D.
Queremos provar que
𝐷
𝑥, 𝑦 𝑑𝐴 ≥ 0. Como
16
𝑛
𝑥, 𝑦 𝑑𝐴 = lim
𝛥 →0
𝐷
(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴
𝑖=1
Vamos supor que
𝑛
𝑥, 𝑦 𝑑𝐴 = lim
𝛥 →0
𝐷
(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 = L ≤ 0
𝑖=1
Então temos que com 𝜖 = −𝐿, existe um𝛿 ≥ 0, tal que se 𝛥 < 𝛿, então
𝑛
(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 < −𝐿
𝑖=1
Mas como
𝑛
𝑛
(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 − 𝐿 ≤
𝑖=1
(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 − 𝐿
𝑖=1
Logo das duas expressões acima temos que se 𝛥 < 𝛿, então
𝑛
𝑛
(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 − 𝐿 < −𝐿 →
(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 < 0
𝑖=1
𝑖=1
Mas essa afirmativa é impossível, pois (𝜉𝑖, 𝛾𝑖) é sempre não negativo e 𝛥𝑖𝐴 > 0;
assim temos uma contradição à nossa hipótese. Assim sendo, segue que
𝑥, 𝑦 𝑑𝐴 ≥ 0
𝐷
como 𝑥, 𝑦 = 𝑓 𝑥, 𝑦 − 𝑔 𝑥, 𝑦 , temos que
𝑥, 𝑦 𝑑𝐴 =
𝐷
𝑓 𝑥, 𝑦 − 𝑔 𝑥, 𝑦 𝑑𝐴 =
𝐷
𝑓 𝑥, 𝑦 𝑑𝐴 −
𝐷
𝑔 𝑥, 𝑦 𝑑𝐴 ≥ 0
𝐷
Logo temos
𝑓 𝑥, 𝑦 𝑑𝐴 ≥ 0 +
𝐷
𝑔 𝑥, 𝑦 𝑑𝐴
𝐷
Portanto temos que pra qualquer f(x,y) e g(x,y) integrável numa região D do R²,onde
𝑓 𝑥, 𝑦 ≥ 𝑔 𝑥, 𝑦 , segue que:
𝑓 𝑥, 𝑦 𝑑𝐴 ≥
𝐷
2.2 Integrais Sucessivas
𝑔 𝑥, 𝑦 𝑑𝐴
𝐷
17
Agora que já definimos a integral dupla, enfrentaremos outro grande problema que é o
de solucioná-las. A maioria dos estudantes de integrais duplas enfrenta dificuldade nessa
tarefa. Segundo Louis Leithold podemos calcular a integral simples através do limite da soma
de Riemann, mas este processo é muito cansativo e trabalhoso, o que levou os matemáticos a
buscarem outro método de solução, que foi encontrado através do uso do teorema
fundamental do cálculo, possibilitando solucionar integral simples usando apenas de sua
primitiva.
“Já observamos que a definição de integral como limite de somas de Riemann não é
um meio prático para o cálculo efetivo de integrais. A mesma observação é valida aqui, em se
tratando de integrais duplas." ( ÁVILA, 1995, p.138)
A partir desse resultado os matemáticos trabalharam na solução prática também para
integrais duplas e chegaram à seguinte conclusão: as integrais duplas podem ser analisadas
como duas integrais simples, logo a solução de uma integral dupla pode ser encontrada
através da solução de duas integrais simples sucessivas.
2.2.1 Teorema (de Fubini)
Seja f(x,y) integrável no retângulo 𝐷 =
Suponhamos que
𝑏
𝑎
𝑥, 𝑦 ∈ 𝑅²| 𝑎 ≤ 𝑥 ≤ 𝑏 𝑒 𝑐 ≤ 𝑦 ≤ 𝑑 .
𝑓 𝑥, 𝑦 𝑑𝑥 exista, para todo y ∈ [c,d], que
𝑑
𝑐
𝑓 𝑥, 𝑦 𝑑𝑦 exista, para todo
x ∈ [a,b]. Então
𝑑
𝑏
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
𝑏
𝑑
𝑓 𝑥, 𝑦 𝑑𝑥 𝑑𝑦 =
𝑐
𝑎
𝑓 𝑥, 𝑦 𝑑𝑦 𝑑𝑥
𝑎
𝑐
A demonstração deste teorema é muito rigorosa e requer ferramentas que não estão ao
nosso alcance, para maiores detalhes o leitor deve consultar um bom livro de Análise. Este
teorema nos diz que se f (x,y) é integrável em uma região D do R² que possui os limites de
integração constantes, a ordem de integração pode ser alterada.
Já estamos acostumados a calcular a integral simples de uma variável real, f(x),
invertendo o processo de derivação, ou seja, através de sua primitiva e do teorema
fundamental do cálculo. Agora vamos trabalhar com duas variáveis reais, podemos usar um
método semelhante, integramos f(x,y) mantendo uma das variáveis fixas e integrando a outra,
ou seja, quando integramos f(x,y) em relação a variável x, consideramos a variável y constante
18
e depois integramos f(x,y) em relação a variável y, e consideramos a variável x constante. Veja
este processo no exemplo abaixo:
2.2.1 Exemplo
Calcule a integral dupla da função f(x,y) = x² + y² sobre o conjunto D, onde D é o
quadrado 0 ≤ 𝑥 ≤ 1, 0 ≤ 𝑦 ≤ 1.
2.2.1 Solução
Veja que estamos calculando a integral dupla de f ao longo da região D que é um
quadrado, entre todas as regiões de integração esta é considerada uma das mais simples, pois
possui os limites de integração constantes, assim segue que:
1
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
1
𝑥² + 𝑦² 𝑑𝑥𝑑𝑦 =
𝐷
𝑥² + 𝑦² 𝑑𝑦 𝑑𝑥
0
0
Note que a solução para esta integral dupla recai sobre a solução de duas integrais
simples sucessivas que podem ser resolvidas através de uma primitiva e do teorema
fundamental do cálculo, sendo assim integraremos para a variável y, com x constante e em
seguida integraremos a variável x, com y constante. Assim segue que:
1
1
1
1
𝑥² + 𝑦² 𝑑𝑦 𝑑𝑥 =
0
1
𝑥2 +
0
1
0
1
1
𝑥2 +
0
𝑥²𝑑𝑥 +
0
0
𝑑𝑥 =
1
0
1
𝑑𝑥 =
3
𝑥2𝑦 +
𝑦²𝑑𝑦 𝑑𝑥 =
0
1³
0³
– 𝑥 2. 0 +
3
3
1
𝑥 + 𝑑𝑥 =
3
2
𝑥²𝑑𝑦 +
0
0
1
1
1
0
0
1
− 0 𝑑𝑥 =
3
1
𝑥²𝑑𝑥 +
3
1
0
1
𝑦³
3
𝑥2 +
0
1
𝑑𝑥
0
1
𝑑𝑥
3
1
𝑥³ 1
1
𝑑𝑥 =
+
𝑥
3
3
0
0
1
𝑥³ 1
1
13 03
1
1 1
2
+
𝑥
=
−
+
1−0 = + =
3
3
3
3
3
3 3
3
0
0
19
Logo o resultado da integral dupla da função f(x,y) = x² + y² sobre o conjunto D, onde
D é o quadrado 0 ≤ 𝑥 ≤ 1, 0 ≤ 𝑦 ≤ 1, é:
1
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
1
𝑥² + 𝑦² 𝑑𝑥𝑑𝑦 =
𝐷
𝑥² + 𝑦² 𝑑𝑦 𝑑𝑥 =
0
0
2
3
Observe que o que acabamos de resolver no exemplo acima é uma integral dupla de
duas variáveis reais, para isto, bastou resolver as duas integrais sucessivas e usar os conceitos
de integral simples. Este resultado é de grande importância, pois a partir dele poderemos
construir algumas ferramentas para a solução de integrais duplas de maior complexidade.
Note também que poderíamos ter resolvido esta integral invertendo a ordem de
integração e encontraríamos o mesmo resultado, pois o teorema de Fubini nos garante que:
1
𝑥² + 𝑦² 𝑑𝑥𝑑𝑦 =
𝐷
1
1
1
𝑥² + 𝑦² 𝑑𝑦 𝑑𝑥 =
0
𝑥² + 𝑦² 𝑑𝑥 𝑑𝑦 =
0
0
0
2
3
A ordem de integração é muito importante, pois através de uma boa escolha podemos
facilitar, em muito, os cálculos para encontrar a solução de uma integral dupla, dependendo da
escolha feita, pode haver casos de não encontrarmos uma solução.
“Em alguns casos, uma boa escolha da ordem de integração pode simplificar bastante
o trabalho. Em outros, pode não ser possível calcular a integral dupla para uma escolha e ser
possível para a outra.” (GONÇALVES; FLEMMING, 2007, p. 237)
O exemplo a seguir ilustra a observação acima.
2.2.2 Exemplo
2
Calcule a integral dupla da função 𝑓 𝑥, 𝑦 = 𝑒 𝑥 sobre o conjunto D, onde D é dado
por 𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 : 0 ≤ 𝑥 ≤ 1, 0 ≤ 𝑦 ≤ 𝑥}.
2.2.2 Solução
20
Integrando primeiro a variável x e depois a variável y, temos a seguinte ordem de
integração
𝑑
𝑏
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝑐
𝐷
1
0
Observe que a integral
𝑥
1
𝑓 𝑥, 𝑦 𝑑𝑥 𝑑𝑦 =
𝑎
0
2
𝑒 𝑥 𝑑𝑥 𝑑𝑦
0
2
𝑒 𝑥 𝑑𝑥 não possui solução, logo se torna impossível resolver
esta integral dupla por esta ordem de integração, cabe então invertermos a ordem de
integração e verificar se a integral pode ser solucionada. Logo integrando primeiro a variável
y e depois a variável x segue que
𝑏
𝑑
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝑥
0
Note que a integral
𝑥
𝑓 𝑥, 𝑦 𝑑𝑦 𝑑𝑥 =
𝑎
𝐷
1
𝑐
0
2
𝑒 𝑥 𝑑𝑦 𝑑𝑥
0
2
2
𝑒 𝑥 𝑑𝑦, pode ser solucionada pois 𝑒 𝑥 é constante em relação a
variável y, assim segue que:
1
0
𝑥
1
2
𝑒 𝑥 𝑑𝑦 𝑑𝑥 =
0
𝑒𝑥
2
0
1
𝑒𝑥
2
0
𝑦
𝑥
1
𝑑𝑦 𝑑𝑥 =
0
1
1
𝑑𝑥 =
0
𝑒𝑥
2
𝑦
0
2
𝑒 𝑥 𝑥 − 0 𝑑𝑥 =
0
1
1
𝑑𝑥
0
2
𝑒 𝑥 𝑥𝑑𝑥
0
Fazendo 𝑢 = 𝑥² → 𝑑𝑢 = 2𝑥𝑑𝑥, com 0 ≤ 𝑢 ≤ 1, segue que
1
2
𝑒 𝑥 𝑥𝑑𝑥 =
0
1
0
𝑒𝑢
1
𝑑𝑢 =
2
2
1
𝑒 𝑢 𝑑𝑢 =
0
1 𝑢 1 1 1
𝑒−1
𝑒
= (𝑒 − 𝑒 0 ) =
0 2
2
2
2
Logo o resultado da integral dupla da função 𝑓 𝑥, 𝑦 = 𝑒 𝑥 sobre o conjunto D, onde
D é dado por 𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 : 0 ≤ 𝑥 ≤ 1, 0 ≤ 𝑦 ≤ 𝑥}, é:
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
𝑒−1
2
No exemplo acima vimos como se faz importante a ordem de integração de uma
integral dupla, para nos auxiliar nesta escolha temos os seguintes corolários.
2.2.1 Corolário
Seja f uma função definida e contínua no conjunto fechado D, onde 𝐷 =
𝑅²| 𝑎 ≤ 𝑥 ≤ 𝑏 𝑒 𝑦1 𝑥 ≤ 𝑦 ≤ 𝑦2(𝑥) , segue que:
𝑥, 𝑦 ∈
21
𝑏
𝑦2(𝑥)
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝑓 𝑥, 𝑦 𝑑𝑦 𝑑𝑥
𝐷
𝑦1(𝑥)
𝑎
2.2.2 Corolário
Seja f(x,y) uma função definida e contínua no conjunto fechado D, onde 𝐷 =
𝑥, 𝑦 ∈ 𝑅²| 𝑐 ≤ 𝑦 ≤ 𝑑 𝑒 𝑥1 𝑦 ≤ 𝑥 ≤ 𝑥2(𝑦) , segue que:
𝑑
𝑥2(𝑦)
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝑓 𝑥, 𝑦 𝑑𝑥 𝑑𝑦
𝐷
𝑐
𝑥1(𝑦)
Os corolários acima mostram como deve ser escolhida a ordem de integração de uma
integral dupla, note que essa escolha se faz muito importante e pode facilitar e muito o nosso
trabalho na solução de integrais duplas. Veja abaixo exemplos de aplicação dos corolários
acima.
2.2.3 Exemplo
Calcule a integral dupla da função f(x,y) = 𝑥 𝑦 sobre o conjunto D, onde D é dado por
𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 : 0 ≤ 𝑥 ≤ 1, 𝑥 2 ≤ 𝑦 ≤ 𝑥}.
2.2.3 Solução
Note que a variável y está dependendo da variável x, logo podemos aplicar o corolário
2.2.1, veja:
𝑏
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
1
𝑦2(𝑥)
𝑓 𝑥, 𝑦 𝑑𝑦 𝑑𝑥 =
𝑎
𝑦1(𝑥)
0
𝑥
𝑥2
𝑥 𝑦𝑑𝑦 𝑑𝑥
Observe que podemos aplicar o teorema fundamental do cálculo e usar as propriedades
de integral para resolver a integral dupla acima, logo temos:
22
1
𝑥2
0
𝑥
𝑥
𝑥2
0
𝑥
𝑥2
0
1
𝑦 2 𝑑𝑦
𝑑𝑥 =
𝑥
0
1
0
1
3
3
𝑥 2 (𝑥 2 )2
𝑥
−
𝑑𝑥 =
3
3
2
2
5
(𝑥 2
0
2
3
𝑥 𝑦𝑑𝑦 𝑑𝑥 =
7
𝑥2
7
2
2
− 𝑥 4 )𝑑𝑥 =
3
1
1
5
𝑥2
1
𝑥
1
1
2
3
1
𝑥
1
0
𝑦𝑑𝑦 𝑑𝑥 =
𝑥
𝑥
1
𝑥
3
2
𝑥2
𝑑𝑥 =
0
3
1
𝑑𝑥 −
0
2
𝑥 4 𝑑𝑥 =
3
7
𝑥5 1
2
−
=
5
3
0
0
3
𝑥 2 (𝑥 2 )2
𝑥
−
𝑑𝑥
3
3
2
2
3
2
2
𝑥(𝑥 2 − 𝑥 3 )𝑑𝑥 =
3
3
0
𝑥2
0
3
𝑦2
1
𝑦 2 𝑑𝑦 𝑑𝑥
1
5
(𝑥 2 − 𝑥 4 )𝑑𝑥
0
7
𝑥2
7
2
1
0
−
𝑥5 1
5
0
7
12 02
15 05
2 2 1
−
−
−
=
−
7
7
5
5
3 7 5
2
2
2 2 1
2 10 − 7
2 3
2
−
=
=
=
3 7 5
3
35
3 35
35
Logo o resultado da integral dupla da função f(x,y) = 𝑥 𝑦 sobre o conjunto D, onde D
é dado por 𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 : 0 ≤ 𝑥 ≤ 1, 𝑥 2 ≤ 𝑦 ≤ 𝑥}, é:
1
𝑥²
𝑓 𝑥, 𝑦 𝑑𝐴 =
𝐷
𝑥 𝑦𝑑𝑦 𝑑𝑥 =
0
𝑥
2
35
2.2.4 Exemplo
𝑥
Calcule a integral dupla da função f(x,y) = sin 𝑦 sobre o conjunto D, onde D é dado
𝜋
por 𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 : 0 ≤ 𝑥 ≤ 𝑦 2 , 2 ≤ 𝑦 ≤ 𝜋}.
2.2.4 Solução
23
Observe que através do conjunto D, temos que a variável x está dependendo da
variável y, logo podemos aplicar o corolário 2.2.2, veja:
𝑑
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
𝜋
𝑥2(𝑦)
𝑦2
𝑓 𝑥, 𝑦 𝑑𝑥 𝑑𝑦 =
𝑥1(𝑦)
𝑐
𝑥
𝑑𝑥 𝑑𝑦
𝑦
sin
0
𝜋
2
A integral dupla acima pode ser solucionada através dos conceitos de integral e do
𝑥
método de mudança de variável, basta fazer 𝑢 = 𝑦 → 𝑑𝑥 = 𝑦𝑑𝑢 , onde 0 ≤ 𝑢 ≤ 𝑦.
𝜋
𝑦2
0
𝜋
2
𝜋
𝜋
𝑥
sin
𝑑𝑥 𝑑𝑦 =
𝑦
sin(𝑢) 𝑦𝑑𝑢 𝑑𝑦 =
𝑦
𝜋
sin(𝑢) 𝑑𝑢 𝑑𝑦 =
0
0
𝜋
2
𝑦
𝜋
2
𝜋
𝑦
𝜋
2
𝑦
𝜋
2
𝑦
𝑦 − cos(𝑢) 𝑑𝑦 =
𝑜
𝜋
𝜋
2
𝑦
𝜋
𝜋
2
𝑦 − cos 𝑦 + cos 0 𝑑𝑦
𝜋
𝑦 − cos 𝑦 + cos 0 𝑑𝑦 = −
𝜋
2
sin(𝑢) 𝑑𝑢 𝑑𝑦
0
𝜋
𝑦 cos 𝑦 𝑑𝑦 +
𝜋
2
𝑑𝑦
Podemos verificar que as duas integrais que encontramos acima podem ser resolvidas
com a ferramenta certa. Na primeira integral podemos aplicar o método de integral por partes
𝑢𝑑𝑣 = 𝑢𝑣 −
𝑣𝑑𝑢, para encontrar a sua primitiva e a segunda integral podemos integrar
normalmente, sendo assim segue que:
Fazendo 𝑢 = 𝑦 → 𝑑𝑢 = 𝑑𝑦 e 𝑑𝑣 = cos(𝑦) → 𝑣 = sin(𝑦), logo nossa integral fica da
seguinte forma:
𝑢𝑑𝑣 = 𝑢𝑣 −
𝑣𝑑𝑢 →
𝑦 cos 𝑦 = 𝑦 sin(𝑦) −
𝑦 cos 𝑦 = 𝑦 sin(𝑦) −
sin(𝑦) 𝑑𝑦
sin(𝑦) 𝑑𝑦 = 𝑦 sin(𝑦) + cos(𝑦)
Logo temos que a primitiva da primeira integral é 𝑦 sin(𝑦) + cos(𝑦), substituindo este
resultado nas integrais acima segue que:
𝜋
𝜋
2
𝑦2
0
𝑥
sin
𝑑𝑥 𝑑𝑦 = −
𝑦
𝜋
𝜋
𝜋
2
𝜋
𝜋
𝜋
𝑦 cos 𝑦 𝑑𝑦 +
𝜋
2
𝑑𝑦 = − 𝑦 sin 𝑦 + cos 𝑦
𝜋+ 𝑦𝜋
2
2
𝜋
𝜋
𝜋
𝜋
𝜋 + 𝑦 𝜋 = − 𝜋 sin 𝜋 + cos 𝜋 − 2 sin 2 − cos 2 + 𝜋 − 2
2
2
𝜋
𝜋
𝜋
𝜋
𝜋
𝜋
− 𝜋 sin 𝜋 + cos 𝜋 − sin
− cos
+ 𝜋 − = − −1 −
+𝜋−
2
2
2
2
2
2
− 𝑦 sin 𝑦 + cos 𝑦
𝜋
24
− −1 −
𝜋
𝜋
𝜋
𝜋
+𝜋− =1+ +𝜋− = 𝜋+1
2
2
2
2
Portanto o resultado da integral dupla da função f(x,y) = sin
𝑥
𝑦
sobre o conjunto D,
𝜋
onde D é dado por 𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 : 0 ≤ 𝑥 ≤ 𝑦 2 , 2 ≤ 𝑦 ≤ 𝜋} , é:
𝜋
𝑦2
𝑓 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
sin
𝜋
2
𝐷
0
𝑥
𝑑𝑥 𝑑𝑦 = 𝜋 + 1
𝑦
2.3 Mudança de variáveis nas integrais duplas
Na integração de funções de uma variável real, usamos a mudança de variável para
transformar uma integral dada em outra mais simples acompanhada por uma correspondente
mudança nos limites de integração. Podemos utilizar essa mesma idéia em integrais duplas
através de um procedimento análogo. Logo por meio de uma mudança de variáveis
𝑥 = 𝑥 𝑢, 𝑣 𝑒 𝑦 = 𝑦(𝑢, 𝑣)
uma integral dupla sobre uma região D do plano 𝑥𝑦 pode ser transformada em uma integral
dupla sobre uma região D’ sobre o plano 𝑢𝑣.
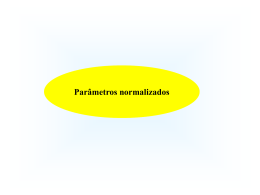
Geometricamente podemos dizer que as equações 𝑥 = 𝑥 𝑢, 𝑣 𝑒 𝑦 = 𝑦(𝑢, 𝑣) definem
uma aplicação que faz os pontos (𝑢, 𝑣) do plano 𝑢𝑣 corresponder a pontos (𝑥, 𝑦) do plano 𝑥𝑦.
Por meio desta aplicação, a região D’ do plano 𝑢𝑣 é aplicada sobre a região D do plano 𝑥𝑦
como mostra a figura 2.
V
Y
D’
D
v
x = x(u,v)
y = y(u,v)
u
U
y
x
X
Figura 2
Observe que a aplicação leva pontos distintos do conjunto D’ a pontos distintos do
conjunto D, podemos notar também que esta aplicação é um por um, logo a aplicação é
25
bijetora e admite inversa, ou seja podemos encontrar uma nova aplicação que leva elementos
do conjunto D a elementos do conjunto D’. Assim a correspondência entre as regiões D e D’ é
dada pela transformação
𝑢 = 𝑥, 𝑦 𝑒 𝑣 = 𝑣 𝑥, 𝑦 .
Considerando essas aplicações contínuas, com derivadas parciais continuas nos
conjuntos D e D’, respectivamente temos
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
onde
𝜕 (𝑥,𝑦)
𝜕 (𝑢,𝑢)
𝑓 𝑥 𝑢, 𝑣 , 𝑦 𝑢, 𝑣
𝐷′
𝜕(𝑥, 𝑦)
𝑑𝑢𝑑𝑣 (1)
𝜕(𝑢, 𝑢)
é o determinante jacobiano de x e y em relação a u e v, dado por
𝜕𝑥 𝜕𝑥
𝜕(𝑥, 𝑦)
= 𝜕𝑢 𝜕𝑣
𝜕𝑦 𝜕𝑦
𝜕(𝑢, 𝑢)
𝜕𝑢 𝜕𝑣
Note que o jacobiano pode ser interpretado como uma medida de quanto a
transformação modifica a área de uma região e que a mudança de variável mostrada acima só
pode ser aplicada se valem as seguintes condições:
f é contínua;
as regiões D e D’ são formadas por um número finito de sub-regiões;
o jacobiano 𝜕 (𝑢,𝑢) ≠ 0 em D’;
𝜕 (𝑥,𝑦)
2.3.5 Exemplo
Calcule a integral dupla da função f(x,y) =
trapézio 1 ≤ 𝑥 + 𝑦 ≤ 2, 𝑥 ≥ 0 𝑒 𝑦 ≥ 0.
2.3.5 Solução
cos (𝑥−𝑦)
sin (𝑥+𝑦 )
sobre o conjunto D, onde D é o
26
Note que esta integral dupla se apresenta muito complexa, logo vamos tentar uma
mudança de variável, com o objetivo de torná-la uma integral dupla mais simples através da
expressão (1).
Façamos então, a seguinte mudança de variável 𝑢 = 𝑥 − 𝑦, 𝑣 = 𝑥 + 𝑦 . Assim temos
𝑢 = 𝑥−𝑦
↔
𝑣=𝑥+𝑦
𝑢 𝑣
+
2 2
𝑣 𝑢
𝑦= −
2 2
𝑥=
Calculando agora o jacobiano
𝜕𝑥
𝜕 𝑥, 𝑦
= 𝜕𝑢
𝜕𝑦
𝜕 𝑢, 𝑢
𝜕𝑢
𝜕𝑥
1
𝜕𝑣 = 2
1
𝜕𝑦
−
2
𝜕𝑣
1
2 =1+1=1
1
4 4 2
2
logo temos,
𝜕 𝑥, 𝑦
1
𝜕 𝑥, 𝑦
1
= → 𝑑𝑥𝑑𝑦 =
𝑑𝑢𝑑𝑣 = 𝑑𝑢𝑑𝑣
𝜕 𝑢, 𝑢
2
𝜕 𝑢, 𝑢
2
Observe que a nossa aplicação é dada por
𝑢 =𝑥−𝑦
𝑣=𝑥+𝑦
e que a inversa desta aplicação é dada por
𝑢 𝑣
𝑥 = 2 +2
𝑣 𝑢
𝑦 =2−2
e que ambas aplicações são continuas e possuem derivadas parciais contínuas.
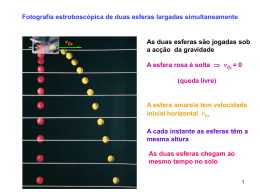
Agora vamos determinar o conjuntos D’, através das aplicações acima, observe que D’
é a imagem do conjunto D através da aplicação
Y
V
v = -u
v=u
2
D’
1
x+y =2
v=2
v=1
D
1
x+y =1
2
X
aplicação
U
u=x-y
v = x+y
Figura 3
Observe que a aplicação transforma as retas x + y = 1, x + y = 2, y = 0 e x = 0,
respectivamente, nas retas v = 1, v = 2, v = u e v = -u. Observe, ainda, que os conjuntos D’ e
27
D são iguais através da aplicação acima. Logo o conjunto D’ é dado por 𝐷′ = { 𝑢, 𝑣 ∈ 𝑅2 ∶
−𝑣 ≤ 𝑢 ≤ 𝑣 𝑒 1 ≤ 𝑣 ≤ 2}.
Note que todas as condições necessárias para efetuar a mudança de variável na integral
dupla foram atendidas, ou seja, f(x,y) é continua, D e D’ são regiões formadas por um número
𝜕 (𝑥,𝑦)
finito de sub-regiões e que o jacobiano 𝜕 (𝑢,𝑢) ≠ 0. Assim segue que:
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
𝐷′
𝜕(𝑥, 𝑦)
𝑑𝑢𝑑𝑣 =
𝜕(𝑢, 𝑢)
𝑓 𝑥 𝑢, 𝑣 , 𝑦 𝑢, 𝑣
𝐷′
2
cos(𝑢) 1
1
𝑑𝑢𝑑𝑣 =
sin(𝑣) 2
2
2
1
2
1
2
1
2
1
2
1
1
sin 𝑣
2
1
1
sin(𝑣)
𝑣
cos(𝑢)
1
𝑑𝑢 𝑑𝑣 =
2
−𝑣 sin(𝑣)
1
𝑣
cos(𝑢) 𝑑𝑢 𝑑𝑣 =
−𝑣
sin 𝑢
1
𝑣
𝑑𝑣 =
−𝑣
2
1
2
2
1
2
1
2
𝑑𝑣 = 𝑣
1
1
1
sin(𝑣)
1
sin 𝑣
sin 𝑢
𝑣
cos(𝑢) 𝑑𝑢 𝑑𝑣
−𝑣
𝑣
𝑑𝑣
−𝑣
1
[sin(𝑣) − sin(−𝑣)] 𝑑𝑣
sin 𝑣
1
1
[sin(𝑣) − sin(−𝑣)] 𝑑𝑣 =
sin 𝑣
2
2
2
2
𝐷′
cos(𝑢) 1
𝑑𝑢𝑑𝑣
sin(𝑣) 2
2
2
1
sin(𝑣)
2
𝑑𝑣 =
sin 𝑣
2
2
𝑑𝑣
1
2
= 2−1 =1
1
Assim temos que a solução da integral dupla da função f(x,y) =
cos (𝑥−𝑦)
sin (𝑥+𝑦)
sobre o
conjunto D, onde D é o trapézio 1 ≤ 𝑥 + 𝑦 ≤ 2, 𝑥 ≥ 0 𝑒 𝑦 ≥ 0, é:
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
𝑓 𝑥 𝑢, 𝑣 , 𝑦 𝑢, 𝑣
𝐷′
𝜕(𝑥, 𝑦)
𝑑𝑢𝑑𝑣 = 1
𝜕(𝑢, 𝑢)
2.4 Coordenadas Polares
Chamamos de coordenadas polares um caso especial de mudança de variável nas
integrais duplas, que pode ser obtido através da parametrização da circunferência. Para
realizar essa mudança de variável usamos as seguintes equações
𝑥 = 𝑟 cos 𝜃 𝑒 𝑦 = 𝑟 sin 𝜃
que nos dão as coordenadas cartesianas de um dado ponto em termos de suas coordenadas
polares, as equações acima podem ser vistas como uma aplicação que leva pontos (𝑟, 𝜃) do
plano 𝑟𝜃 a pontos (𝑥, 𝑦) do plano 𝑥𝑦.
28
Observe que todas as propriedades de mudança de variável que vimos até aqui,
continuam valendo, pois na verdade, o que temos agora é um caso particular do que foi
estudado, sendo assim podemos calcular o jacobiano. Veja:
𝜕𝑥
𝜕 𝑥, 𝑦
= 𝜕𝑟
𝜕𝑦
𝜕 𝑟, 𝜃
𝜕𝑟
𝜕𝑥
𝜕𝜃 = cos 𝜃
𝜕𝑦
sin 𝜃
𝜕𝜃
−𝑟 sin 𝜃
= 𝑟 cos ²𝜃 + 𝑟 sin ²𝜃 = 𝑟(cos ²𝜃 + sin ²𝜃)
𝑟 cos 𝜗
𝜕 𝑥, 𝑦
𝜕 𝑥, 𝑦
=𝑟→
𝜕 𝑟, 𝜃
𝜕 𝑟, 𝜃
= 𝑟, com 𝑟 ≥ 0, Logo 𝑑𝑥𝑑𝑦 = 𝑟𝑑𝑟𝑑𝜃
A partir do jacobiano e das equações 𝑥 = 𝑟 cos 𝜃 𝑒 𝑦 = 𝑟 sin 𝜃, temos o que
chamamos de coordenadas polares
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃
𝐷′
𝜕(𝑥, 𝑦)
𝑑𝑟𝑑𝜃 =
𝜕(𝑟, 𝜃)
𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃 𝑟𝑑𝑟𝑑𝜃
𝐷′
logo segue que
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃 𝑟𝑑𝑟𝑑𝜃
𝐷′
É com freqüência mais conveniente descrever as fronteiras de uma região
utilizando as coordenadas polares 𝑟, 𝜃 em vez das coordenadas cartesianas
𝑥, 𝑦. Nessas circunstâncias podemos usualmente economizar trabalho
expressando uma integral dupla 𝐷 𝑓 𝑥, 𝑦 𝑑𝐴 em termos de coordenadas
polares. ( SIMMONS, 1988, p.479 )
As coordenadas polares é uma ferramenta muito forte na resolução de integrais duplas,
geralmente elas são utilizadas para realizar uma mudança no integrando e no conjunto de
integração, com o objetivo de transformar uma integral dupla complexa em uma integral
dupla mais simples.
2.4.1 Exemplo
Calcule a integral dupla da função 𝑓 𝑥, 𝑦 = 2𝑥 + 𝑦 sobre o conjunto D, onde D é
dado 𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 ∶ −3 ≤ 𝑥 ≤ 3 𝑒 0 ≤ 𝑦 ≤
9 − 𝑥²}.
29
2.4.1 Solução
Note que a integral dupla possui um conjunto de integração muito complexo e que
desenhando este conjunto temos que ele é um semicírculo. Veja:
y
y = 9 − 𝑥²
-3
x
3
D
Figura 4
Sendo assim, podemos simplificar nosso trabalho através de uma mudança de variável,
como o nosso conjunto D é um semicírculo, podemos mudá-lo para coordenadas polares.
Observe que o raio do nosso semicírculo está entre 0 ≤ 𝑟 ≤ 3 e que tomando a origem como
eixo de rotação temos que o nosso ângulo de rotação está entre 0 ≤ 𝜃 ≤ 𝜋. Logo em
coordenadas polares temos um novo conjunto D’, onde D’ é dado por 𝐷′ = { 𝑟, 𝜃 ∈ 𝑅2 ∶
0 ≤ 𝑟 ≤ 3 𝑒 0 ≤ 𝜃 ≤ 𝜋}. Veja:
𝜃
𝜋
D’
0
r
3
Figura 5
Aplicando então, coordenadas polares segue que
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
2𝑥 + 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃 𝑟𝑑𝑟𝑑𝜃
𝐷′
como
𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃 = 2𝑟 cos 𝜃 + 𝑟 sin 𝜃
Temos que:
𝜋
3
𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃 𝑟𝑑𝑟𝑑𝜃 =
𝐷′
2𝑟 cos 𝜃 + 𝑟 sin 𝜃 𝑟𝑑𝑟 𝑑𝜃
0
0
30
𝜋
3
𝜋
3
2𝑟 cos 𝜃 + 𝑟 sin 𝜃 𝑟𝑑𝑟 𝑑𝜃 =
0
𝑟² 2 cos 𝜃 + sin 𝜃 𝑑𝑟 𝑑𝜃
0
𝜋
0
3
0
𝜋
3
𝑟² 2 cos 𝜃 + sin 𝜃 𝑑𝑟 𝑑𝜃 =
0
0
2 cos 𝜃 + sin 𝜃
0
𝜋
3
2 cos 𝜃 + sin 𝜃
0
𝜋
𝑟²𝑑𝑟 𝑑𝜃 =
0
𝜋
3
2 cos 𝜃 + sin 𝜃
0
0
3
𝑟 3
3
𝑑𝜃 =
3 0
3
9 2 sin 𝜃 − cos 𝜃
𝑟²𝑑𝑟 𝑑𝜃
0
𝑟3 3
2 cos 𝜃 + sin 𝜃
𝑑𝜃
3 0
𝜋
2 cos 𝜃 + sin 𝜃 𝑑𝜃 = 9 2 sin 𝜃 − cos 𝜃
0
𝜋
0
𝜋
= 9(2 sin 𝜋 − 2 sin 0 − cos 𝜋 + cos 0)
0
9 1 + 1 = 18
Portanto o resultado da integral dupla da função 𝑓 𝑥, 𝑦 = 2𝑥 + 𝑦 sobre o conjunto
D, onde D é dado 𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 ∶ −3 ≤ 𝑥 ≤ 3 𝑒 0 ≤ 𝑦 ≤ 9 − 𝑥²}.
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃 𝑟𝑑𝑟𝑑𝜃 = 18
𝐷′
31
CAPÍTULO 3 APLICAÇÕES DE INTEGRAIS DUPLAS
Neste capítulo trataremos das aplicações das integrais duplas em diversas áreas do
conhecimento. As integrais duplas são uma forte ferramenta matemática que possibilitou a
solução de problemas que até então não possuíam respostas, gerando um grande avanço e
contribuição para várias ciências que careciam de uma ferramenta para o seu
desenvolvimento.
3.1 Cálculo de volume
“Se aproximarmos um sólido por colunas retangulares e aumentarmos o número de
colunas, o limite da soma dos volumes das colunas será o volume do sólido” (STEWART,
2007, p. 978,2007)
Como vimos anteriormente a soma de Riemann nas integrais duplas é a soma dos
volumes dos paralelepípedos cujas bases são os sub-retângulos e cujas alturas
correspondentes são os valores de 𝑓(𝜉𝑖, 𝛾𝑖), considerando f(x,y) maior ou igual a zero numa
região D do R², temos que
𝐷
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 é uma aproximação do volume da porção de
espaço compreendido entre f(x,y) e a região D do plano xy.
“Quando ∆𝑥 → 0 e ∆𝑦 → 0, essa soma vai se aproximando mais e mais do que
podemos chamar o volume do sólido delimitado pelo domínio D, pelo gráfico f e pelas retas
que passam pela fronteira de D e são paralelas ao eixo Oz.”( ÁVILA, 1995, p.136)
Sendo assim podemos expressar o volume V de uma função f(x,y) não-negativa,
contínua e integrável sobre uma região D, como
𝑉=
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥
𝐷
Através desta aplicação podemos calcular o volume de vários sólidos geométricos que
até então representavam um grande problema para a geometria comum. Ela nos permite
32
calcular o volume de qualquer espaço compreendido entre f(x,y) e o plano xy. Veja no
exemplo a seguir:
3.1.1 Exemplo
Calcule o volume do sólido dado por 𝑧² + 𝑦² + 𝑥² ≤ 𝑅², onde R é uma constante.
3.1.1 Solução
Desenhando o sólido procurado, temos que estamos trabalhando com uma esfera com
centro na origem, logo temos duas funções que são 𝑓 𝑥, 𝑦 =
𝑟² − 𝑦² − 𝑥² e 𝑓 𝑥, 𝑦 =
− 𝑟² − 𝑦² − 𝑥². Veja a figura abaixo:
z
𝑓 𝑥, 𝑦 =
𝑅² − 𝑦² − 𝑥²
x
V1
raio
R
𝑓 𝑥, 𝑦 = − 𝑅² − 𝑦² − 𝑥²
V2
y
Figura 6
Observe que temos duas funções geradas por 𝑧² + 𝑦² + 𝑥² ≤ 𝑅², uma acima e a outra
abaixo do plano xy. Temos que a projeção no plano xy é a de um círculo de raio R, como
mostra a figura abaixo:
33
y
𝑦=
R
-R
𝑟² − 𝑥²
x
R
raio
𝑦 = − 𝑟² − 𝑥²
-R
Figura 7
Sendo assim temos que o conjunto de integração é D, dado por 𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 ∶
−𝑅 ≤ 𝑥 ≤ 𝑅 𝑒 − 𝑅² − 𝑥² ≤ 𝑦 ≤
𝑅² − 𝑥²}, logo o volume do sólido é dado por:
𝑉 = 𝑉1 + 𝑉2
Calculando 𝑉1, que é volume do sólido acima do plano xy, temos:
𝑉1 =
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
𝑅
𝑟²−𝑥²
−𝑅
− 𝑟²−𝑥²
𝑅² − 𝑦² − 𝑥²𝑑𝑦𝑑𝑥 =
𝐷
𝑅² − 𝑦² − 𝑥²𝑑𝑦 𝑑𝑥
Note que encontramos uma integral dupla muito complexa, fazendo então, a mudança
para coordenadas polares temos um novo conjunto D’, dado por 𝐷′ = { 𝑟, 𝜃 ∈ 𝑅2 ∶ 0 ≤ 𝑟 ≤
𝑅 𝑒 0 ≤ 𝜃 ≤ 2𝜋}, assim segue que
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
𝐷′
Como 𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃 =
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃 𝑟𝑑𝑟𝑑𝜃
2
𝑅² − 𝑟 sin 𝜃
− (𝑟 cos 𝜃)² =
𝑓 𝑟 cos 𝜃 , 𝑟 sin 𝜃 𝑟𝑑𝑟𝑑𝜃 =
𝐷′
𝑅² − 𝑟², logo temos
𝑅² − 𝑟² 𝑟𝑑𝑟𝑑𝜃
𝐷′
2𝜋
𝑅
𝑅² − 𝑟² 𝑟𝑑𝑟𝑑𝜃 =
𝑅² − 𝑟² 𝑟𝑑𝑟 𝑑𝜃
0
𝐷′
0
Fazendo 𝑢 = 𝑅² − 𝑟² → 𝑑𝑢 = −2𝑟𝑑𝑟, onde 𝑅² ≤ 𝑢 ≤ 0, temos então
2𝜋
𝑅
2𝜋
𝑅² − 𝑟² 𝑟𝑑𝑟 𝑑𝜃 =
0
0
0
1
−
2
0
𝑅²
1
𝑢 𝑑𝑢 𝑑𝜃 = −
2
2𝜋
0
3
𝑢2 0
𝑑𝜃
3
2 𝑅²
34
2𝜋
1
−
2
−
0
1
2
3
𝑢2 0
1
𝑑𝜃 = −
3
2
2 𝑅²
2𝜋
0−
0
3
2𝜋
3
02 (𝑅²)2
1
−
𝑑𝜃 = −
3
3
2
2
2
0
2𝑅3
1
2𝑅3
𝑑𝜃 = − −
3
2
3
2𝜋
𝑑𝜃 =
0
2𝜋
0
2𝑅3
0−
𝑑𝜃
3
𝑅3
2𝜋𝑅3
2𝜋 − 0 =
3
3
Logo temos que o volume 𝑉1 é dado por
𝑉1 =
𝑅
𝑟²−𝑥²
−𝑅
− 𝑟²−𝑥²
𝑅² − 𝑦² − 𝑥²𝑑𝑦𝑑𝑥 =
𝐷
2𝜋𝑅3
𝑅² − 𝑦² − 𝑥²𝑑𝑦 =
3
Calculando agora 𝑉2, que é o volume do sólido abaixo do plano xy, temos
𝑉2 =
𝑓 𝑥, 𝑦 𝑑𝑦𝑑𝑥 =
𝐷
𝑅
𝑟²−𝑥²
−𝑅
− 𝑟²−𝑥²
− 𝑅² − 𝑦² − 𝑥²𝑑𝑦𝑑𝑥 = −
𝐷
𝑅² − 𝑦² − 𝑥²𝑑𝑦 𝑑𝑥
Observe que 𝑉2 = −𝑉1, logo temos que
𝑉2 =
𝑅
𝑟²−𝑥²
−𝑅
− 𝑟²−𝑥²
− 𝑅² − 𝑦² − 𝑥²𝑑𝑦𝑑𝑥 = −
𝐷
2𝜋𝑅3
𝑅² − 𝑦² − 𝑥²𝑑𝑦 = −
3
Verificamos aqui que o volume do sólido abaixo do plano xy, resultou em um
resultado negativo, o que é um absurdo, pois só existe volume positivo.
Quando f for positiva em alguns pontos e negativa em outros, a integral
consistirá em duas partes: uma parcela positiva, igual ao volume do sólido
correspondente ao subconjunto D onde f é positiva; e uma parcela negativa,
igual, em valor absoluto, ao volume do sólido correspondente ao
subconjunto de D onde f é negativa. ( ÁVILA, 1995, p.138)
Logo devemos considerar o seu volume em valor absoluto, sendo assim temos que o
volume procurado é
𝑉 = 𝑉1 + 𝑉2 =
2𝜋𝑅3
2𝜋𝑅3
2𝜋𝑅3 2𝜋𝑅3 4𝜋𝑅3
+ −
=
+
=
3
3
3
3
3
Portanto o volume do sólido dado por 𝑧² + 𝑦² + 𝑥² ≤ 𝑅², onde R é uma constante é
dado por
𝑉=
3.2 Cálculo de área
4𝜋𝑅3
3
35
A área de uma figura plana D, com fronteira regular, é definida como sendo a integral
da função f(x,y) = 1 em D,isto é,
𝐴=
𝑑𝑥𝑑𝑦
𝐷
É fácil perceber que quando fazemos f(x,y) = 1, a soma de Riemann somará somente a
área dos polígonos que vão se aproximando gradativamente da área da região D do plano xy, à
medida que ∆𝑥 e ∆𝑦 tendem a zero.
Através desta aplicação podemos calcular a área de várias figuras planas, desde as
mais simples até as mais complexas que as vezes se tornam um grande desafio para a
geometria comum. Veja :
3.2.1 Exemplo
Calcule a área do conjunto D, onde D é o conjunto dado por
𝑥²
𝑎²
𝑦²
+ 𝑏² ≤ 1.
3.2.1 Solução
Através do conjunto dado temos que estamos trabalhando com uma elipse, logo temos
duas possibilidades para o conjunto D, como mostra as figuras abaixo. Veja:
Y
Y
𝑦=
𝑏² −
𝑏²𝑥²
𝑎²
𝑦=
D
𝑏² −
𝑏²𝑥²
𝑎²
D
X
a <b
𝑦 = − 𝑏² −
Figura 8
X
𝑏²𝑥²
𝑎²
a>b
36
Para ambos os casos temos que a área do conjunto de D é a mesma, logo temos que o
conjunto D, é dado por 𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 ∶ −𝑏 ≤ 𝑥 ≤ 𝑏 𝑒 − 𝑏² −
𝑏²𝑥²
≤𝑦≤
𝑎²
𝑏² −
𝑏²𝑥²
𝑎²
}e
podemos calculá-la através da definição de integral dupla, ou seja
𝐴=
𝑑𝑥𝑑𝑦
𝐷
Logo segue que
𝐴=
𝑑𝑥𝑑𝑦 =
𝐷
𝑏²𝑥²
𝑏²−
𝑎²
𝑏
𝑏²𝑥²
− 𝑏²−
𝑎²
−𝑏
𝑑𝑥 𝑑𝑦
Observe que a integral acima se apresenta muito complexa, portanto vamos tentar uma
mudança de variável fazendo 𝑥 = 𝑎 𝑟𝑐𝑜𝑠 𝜃 e 𝑦 = 𝑏𝑟 𝑠𝑖𝑛 𝜃, temos
𝑥² 𝑦²
(𝑎 𝑟𝑐𝑜𝑠 𝜃)² (𝑏𝑟 𝑠𝑖𝑛 𝜃)²
+ ≤1→
+
≤ 1 → 𝑟² 𝑐𝑜𝑠 ²𝜃 + 𝑟²𝑠𝑖𝑛 ²𝜃 ≤ 1
𝑎² 𝑏²
𝑎²
𝑏²
Assim temos que
𝑟² 𝑐𝑜𝑠 ²𝜃 + 𝑟²𝑠𝑖𝑛 ²𝜃 ≤ 1 → 𝑟 ≤ 1
Logo temos um novo conjunto D’, dado por 𝐷′ = { 𝑟, 𝜃 ∈ 𝑅2 ∶ 0 ≤ 𝑟 ≤ 1 𝑒 0 ≤ 𝜃 ≤
2𝜋}. Calculando agora o jacobiano temos
𝜕𝑥
𝜕 𝑥, 𝑦
= 𝜕𝑟
𝜕𝑦
𝜕 𝑟, 𝜃
𝜕𝑟
𝜕𝑥
𝜕𝜃 = acos 𝜃
𝜕𝑦
bsin 𝜃
𝜕𝜃
−𝑎𝑟 sin 𝜃
= 𝑎𝑏𝑟 cos ²𝜃 + 𝑎𝑏𝑟 sin ²𝜃 = 𝑎𝑏𝑟
𝑏𝑟 cos 𝜗
Sendo assim temos
𝐴=
𝑑𝑥𝑑𝑦 =
𝐷
𝐷′
2𝜋
𝜕(𝑥, 𝑦)
𝑑𝑟𝑑𝜃 =
𝜕(𝑢, 𝑢)
1
𝑎𝑏
2𝜋
𝑟 𝑑𝑟 𝑑𝜃 = 𝑎𝑏
0
0
0
𝑎𝑏
2
2𝜋
𝑑𝜃 =
0
2𝜋
1
2𝜋
𝑎𝑏𝑟 𝑑𝑟 𝑑𝜃 = 𝑎𝑏
0
0
𝑟2 1
𝑑𝜃 = 𝑎𝑏
2 0
2𝜋
0
𝑑𝑥𝑑𝑦 = 𝜋𝑎𝑏
𝐷
Portanto a área do conjunto D, é dada por 𝐴 = 𝜋𝑎𝑏
3.3 Massa
𝑟 𝑑𝑟 𝑑𝜃
0
0
1 2 02
𝑎𝑏
−
𝑑𝜃 =
2
2
2
𝑎𝑏 2𝜋 𝑎𝑏
2𝜋𝑎𝑏
𝜃
=
2𝜋 − 0 =
= 𝜋𝑎𝑏
0
2
2
2
𝐴=
1
2𝜋
𝑑𝜃
0
37
Seja uma lâmina colocada numa região D do plano xy e cuja densidade (em unidades
de massa por área) no ponto (x,y) em D é dada por 𝛿(𝑥, 𝑦), onde 𝛿 é uma função contínua e
integrável sobre a região D, então 𝛿(𝑥, 𝑦)𝑑𝑥𝑑𝑦 é a massa do elemento de área 𝑑𝑥𝑑𝑦, e a
massa total da lâmina é
𝑚=
𝛿(𝑥, 𝑦)𝑑𝑥𝑑𝑦
𝐷
Através desta aplicação podemos calcular a massa de qualquer lâmina numa região D
do plano xy, basta termos a função densidade para obter a massa total de uma lâmina
qualquer.
3.3.1 Exemplo
Uma lâmina tem a forma de um retângulo cujos vértices são (0,0), (4,0), (0,2) e (4,2).
Determine a massa da lâmina, medida em gramas, sabendo que a densidade de massa por
área num ponto P é 𝛿 𝑥, 𝑦 = 3𝑥𝑦.
3.3.1 Solução
Para calcular a massa dessa lâmina usaremos de integrais duplas, observe que a lâmina
é na forma de um retângulo, logo podemos desenhar o conjunto de integração D. Veja:
y
(0,2)
(4,2)
(0,0)
(4,0)
D
x
Figura 9
38
Sendo assim temos que o conjunto D, é dado por 𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 ∶ 0 ≤ 𝑥 ≤ 4 𝑒 0 ≤
𝑦 ≤ 2}, e a massa total é
2
𝑚=
𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
3𝑥𝑦 𝑑𝑥𝑑𝑦 =
2
4
𝑦
0
2
𝑥 𝑑𝑥 𝑑𝑦 = 3
0
𝑦
0
2
3
0
0
𝑥2 4
𝑑𝑦 = 3
2 0
2
8𝑦 𝑑𝑦 = 24
𝑦 𝑑𝑦 = 24
0
𝑚=
2
3𝑥𝑦 𝑑𝑥 𝑑𝑦 = 3
0
𝐷
3
4
4
𝑦
0
2
𝑦
0
16
− 0 𝑑𝑦 = 3
2
𝑥 𝑑𝑥 𝑑𝑦
0
2
8𝑦 𝑑𝑦
0
𝑦2 2
4 0
= 24 −
= 48
2 0
2 2
𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦 = 48
𝐷
Logo a massa total da lâmina é de 48 gramas.
3.4 Carga
Se uma carga elétrica está distribuída sobre uma região D e a densidade de carga (em
unidades de carga por unidade de área) é dada por 𝛿 𝑥, 𝑦 num ponto 𝑥, 𝑦 em D, então a
carga total q é
𝑞=
𝛿(𝑥, 𝑦)𝑑𝑥𝑑𝑦
𝐷
3.4.1 Exemplo
A carga é distribuída sobre uma região D delimitada pelo retângulo de vértices (3,2),
(0,2), (3,0) e (0,0) de modo que a densidade de carga num ponto (x,y) seja 𝛿 𝑥, 𝑦 = 𝑥²𝑦,
medida em coulomb por metro quadrado (C/m2). Determine sua carga total.
3.4.1 Solução
39
Para calcular a carga total, primeiramente temos que desenhar a região D, sabemos
que ela é delimitada por um retângulo, veja:
y
(3,2)
(0,2)
D
x
(3,0)
(0,0)
Figura 10
Sendo assim temos que a região D, é dada por 𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 ∶ 0 ≤ 𝑥 ≤ 3 𝑒 0 ≤
𝑦 ≤ 2}, e a carga total é:
𝑞=
𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
2
2
𝑥 𝑦 𝑑𝑥𝑑𝑦 =
3
𝑦
0
2
𝑥² 𝑑𝑥 𝑑𝑦 =
0
0
2
9
0
2
2
𝑥 𝑦 𝑑𝑥 𝑑𝑦 =
0
𝐷
2
3
𝑥3 3
𝑦
𝑑𝑦 =
3 0
0
3
𝑦
0
2
0
27 0
𝑦
− 𝑑𝑦 = 9
3 3
𝑥 2 𝑑𝑥 𝑑𝑦
0
2
𝑦 𝑑𝑦
0
𝑦2 2
4 0
𝑦 𝑑𝑦 = 9
=9 −
= 18
2 0
2 2
𝑞 = 18
Portanto a carga total distribuída ao longo da região D é de 18 coulombs.
3.5 Centro de massa
É o ponto (𝑥, 𝑦 ) cujas coordenadas são definidas por
𝑥 =
𝑀𝑦
=
𝑚
𝐷
𝑥𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦
𝐷
𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦
e𝑦 =
𝑀𝑥
=
𝑚
𝐷
𝑦𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦
𝐷
𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦
onde 𝑚 é a massa, 𝑀𝑥 e 𝑀𝑦 são os momentos da lâmina em torno do eixo, ou seja, o produto
de sua massa pela distância (na perpendicular) ao eixo. “ O momento total de toda a massa da
40
lâmina é obtido
pela soma:
isto
é, pela
integração de
todos os momentos
“infinitesimais”.”(NUNEM; FOULIS, 1982, p.958)
Nesse ponto temos o chamado ponto de equilíbrio da lâmina que é chamado de centro
de massa. O significado físico disso é que a lâmina se comporta como se toda sua massa
estivesse concentrada no ponto (𝑥, 𝑦 ). Quando a distribuição da massa é uniforme, temos que
a densidade 𝛿 é constante, neste caso o centro de massa é o centro geométrico da região, por
essa razão, é usualmente chamado de centróide. “O centróide de uma região planar é uma
noção puramente geométrica e é independente da concepção física de massa” (NUNEM;
FOULIS, 1982, p.958)
3.5.1 Exemplo
Determine a massa e o centro de massa de uma lâmina triangular com vértices (0,0),
(1,0) e (0,2), sabendo que a função densidade é 𝛿 𝑥, 𝑦 = 1 + 3𝑥 + 𝑦.
3.5.1 Solução
Desenhando a lâmina temos o seguinte conjunto D. Veja:
y
2
D
y = 2 -2x
0
1
x
Figura 11
Logo o conjunto D é formado pelas retas x = 0, y = 0 e y = 2 -2x. Podemos expressar
D por:
41
𝐷 = { 𝑥, 𝑦 ∈ 𝑅2 ∶ 0 ≤ 𝑥 ≤ 1 𝑒 0 ≤ 𝑦 ≤ 2 − 2𝑥}
Assim a massa da lâmina é:
1
𝑚=
𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
1 + 3𝑥 + 𝑦 𝑑𝑥𝑑𝑦 =
2−2𝑥
0
0
1
0
0
1
1 + 3𝑥 + 𝑦 𝑑𝑦 𝑑𝑥 =
1
1 + 3𝑥 + 𝑦 𝑑𝑦 𝑑𝑥
0
𝐷
1
2−2𝑥
0
𝑦 + 3𝑥𝑦 +
0
1
2
𝑦 2 − 2𝑥
𝑦 + 3𝑥𝑦 +
𝑑𝑥 =
0
2
4𝑥
3
1
2
2 − 2𝑥
2 − 2𝑥 + 6𝑥 − 6𝑥 +
2
4𝑥 −
2 − 2𝑥
2 − 2𝑥 + 6𝑥 − 6𝑥 +
2
2
0
2
𝑑𝑥 =
0
3
𝑦 2 2 − 2𝑥
𝑑𝑥
0
2
2
𝑑𝑥
4𝑥 3 1
4 − 4𝑥² 𝑑𝑥 = 4𝑥 −
3 0
4 8
1
=4− =
0
3 3
Logo a massa da lâmina é de
𝑚=
8
3
Os momentos são:
1
𝑀𝑥 =
𝑦𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
2−2𝑥
0
1
0
𝐷
1
1
0
2 − 2𝑥
2
0
1
0
1
𝑦 + 3𝑥𝑦 + 𝑦 2 𝑑𝑦 𝑑𝑥 =
2
+
3𝑥 2 − 2𝑥
2
14
10𝑥 3
− 6𝑥 − 2𝑥² +
3
3
2
+
1
0
2 − 2𝑥
3
𝑑𝑥 =
𝑦 + 3𝑥𝑦 + 𝑦 2 𝑑𝑦 𝑑𝑥
0
𝑦 2 3𝑥𝑦 2 𝑦 3 2 − 2𝑥
+
+
𝑑𝑥
0
2
2
3
0
𝑦 2 3𝑥𝑦 2 𝑦 3 2 − 2𝑥
+
+
𝑑𝑥 =
0
2
2
3
0
2−2𝑥
𝑦 1 + 3𝑥 + 𝑦 𝑑𝑥𝑑𝑦 =
2 − 2𝑥
2
2
+
3𝑥 2 − 2𝑥
2
1
3
𝑑𝑥 =
0
2
+
2 − 2𝑥
3
3
14
10𝑥 3
− 6𝑥 − 2𝑥² +
3
3
𝑑𝑥
𝑑𝑥
14𝑥
2𝑥 3 5𝑥 4 1 14
2 5
− 3𝑥² −
+
=
−3− +
3
3
6 0
3
3 6
14
2 5 14 − 9 − 2 5
5 11
−3− + =
+ =1+ =
3
3 6
3
6
6
6
1
𝑀𝑦 =
𝑥𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
𝑥 1 + 3𝑥 + 𝑦 𝑑𝑥𝑑𝑦 =
2−2𝑥
𝑥
0
1 + 3𝑥 + 𝑦 𝑑𝑦 𝑑𝑥
0
1
1 + 3𝑥 + 𝑦 𝑑𝑦 𝑑𝑥 =
0
𝑥
0
𝐷
1
2−2𝑥
𝑥 𝑦 + 3𝑥𝑦 +
0
𝑦 2 2 − 2𝑥
𝑑𝑥
0
2
42
1
0
1
0
𝑦 2 2 − 2𝑥
𝑥 𝑦 + 3𝑥𝑦 +
𝑑𝑥 =
0
2
2 − 2𝑥
𝑥 2 − 2𝑥 + 6𝑥 − 6𝑥 +
2
2
1
(4𝑥 − 4𝑥 3 ) 𝑑𝑥 =
0
1
2 − 2𝑥
2
𝑥 2 − 2𝑥 + 6𝑥 − 6𝑥 2 +
0
1
2
𝑑𝑥 =
1
𝑥 4 − 4𝑥² 𝑑𝑥 =
0
2
4𝑥
4𝑥
−
2
4
4
2
𝑑𝑥
(4𝑥 − 4𝑥 3 ) 𝑑𝑥
0
1 4 4
= − = 2−1= 1
0 2 4
Assim segue que:
11
e 𝑀𝑦 = 1
6
Agora podemos finalmente calcular o centro de massa da nossa lâmina, observe que
𝑀𝑥 =
11
𝑀𝑦
1 3
𝑀𝑥
11
𝑥 =
= = e𝑦 =
= 6 =
8 8
8
𝑚
𝑚
16
3
3
Logo o centro de massa da nossa lâmina é o ponto 𝑥, 𝑦 =
3 11
,
8 16
, indicado na figura
abaixo:
y
3 11
,
8 16
2
D
y = 2 -2x
Centro de massa
0
1
x
Figura 12
3.6 Momento de inércia
O momento de inércia de uma partícula cuja a massa é 𝑚 em torno de um eixo é
definido como 𝑚𝑟², onde 𝑟 é a distância da partícula ao eixo. Estendendo este conceito para
uma lâmina com função densidade 𝛿 𝑥, 𝑦 contínua numa região D do plano 𝑥𝑦 e aplicando o
43
conceito de integral dupla, temos então, o que chamamos de momento de inércia de uma
distribuição contínua de massa.
Logo temos que o momento de inércia em torno do eixo 𝑥 será determinado por
𝑛
𝐼𝑥 = lim
𝛥 →0
𝛾𝑖² 𝛿(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 =
𝑖=1
𝑦² 𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦.
𝐷
Da mesma forma o momento de inércia em torno do eixo 𝑦 é dado por
𝑛
𝐼𝑦 = lim
𝛥 →0
𝜉𝑖² 𝛿(𝜉𝑖, 𝛾𝑖 )𝛥𝑖𝐴 =
𝑖=1
𝑥² 𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦.
𝐷
Podemos também determinar o momento de inércia em torno da origem, também
chamado de momento polar de inércia ou momento de inércia em torno do eixo 𝑧:
𝐼0 = 𝐼𝑥 + 𝐼𝑦 =
𝑦² 𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦 +
𝐷
(𝑥 2 + 𝑦²) 𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦
𝑥² 𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦 =
𝐷
𝐷
(𝑥 2 + 𝑦²) 𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦
𝐼0 =
𝐷
3.6.1 Exemplo
Determine os momentos de inércia 𝐼𝑥 , 𝐼𝑦 e 𝐼0 do disco homogêneo D com densidade
𝛿 𝑥, 𝑦 = 𝑘, centro na origem e raio 𝑎.
3.6.1 Solução
A fronteira do conjunto D é o círculo 𝑥² + 𝑦² = 𝑎² que em coordenadas polares D é
descrito por 𝐷′ = { 𝑟, 𝜃 ∈ 𝑅2 ∶ 0 ≤ 𝑟 ≤ 𝑎 𝑒 0 ≤ 𝜃 ≤ 2𝜋}.
Calculando 𝐼𝑥 , temos:
2𝜋
𝐼𝑥 =
𝑦² 𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦 = 𝑘
𝐷
𝑎
sin ²𝜃
0
3
2𝜋
𝑟 𝑑𝑟 𝑑𝜃 = 𝑘
0
sin ²𝜃
0
𝐷′
2𝜋
𝑘
(𝑟 sin 𝜃) ² 𝑟𝑑𝑟𝑑𝜃 = 𝑘
𝑎
0
𝑟4 𝑎
𝑎4
sin ²𝜃
𝑑𝜃 = 𝑘
4 0
4
𝑟 3 𝑑𝑟 𝑑𝜃
0
2𝜋
sin ²𝜃 𝑑𝜃
0
44
𝑘𝑎4
4
2𝜋
0
𝑘𝑎4
sin ²𝜃 𝑑𝜃 =
4
2𝜋
𝑘𝑎4
8
2𝜋
1 − cos 2𝜃
𝑘𝑎4
𝑑𝜃 =
2
8
0
2𝜋
𝑑𝜃 −
0
cos 2𝜃 𝑑𝜃 =
0
𝑘𝑎4
8
𝜃
2𝜋
2𝜋
𝑑𝜃 −
cos 2𝜃 𝑑𝜃
0
0
sin 2𝜃 2𝜋
𝑘𝑎4
2𝜋
−
=
2𝜋 − 0
0
0
2
8
𝑘𝑎4
2𝑘𝜋𝑎4 𝑘𝜋𝑎4
2𝜋 − 0 =
=
8
8
4
𝑘𝜋𝑎 4
Logo temos que o momento de inércia em torno do eixo 𝑥 é 𝐼𝑥 =
4
.
Calculando agora 𝐼𝑦 , temos:
2𝜋
𝐼𝑦 =
𝑥² 𝛿 𝑥, 𝑦 𝑑𝑥𝑑𝑦 = 𝑘
𝐷
𝑘
𝑎
cos ²𝜃
0
𝑘𝑎4
8
2𝜋
0
2𝜋
3
𝑟 𝑑𝑟 𝑑𝜃 = 𝑘
0
0
𝑘𝑎4
cos ²𝜃 𝑑𝜃 =
4
2𝜋
2𝜋
𝑑𝜃 +
0
0
2𝜋
0
cos ²𝜃
0
𝐷′
2𝜋
𝑘𝑎4
4
(𝑟 cos 𝜃) ² 𝑟𝑑𝑟𝑑𝜃 = 𝑘
𝑎
𝑟4 𝑎
𝑎4
cos ²𝜃
𝑑𝜃 = 𝑘
4 0
4
1 + cos 2𝜃
𝑘𝑎4
𝑑𝜃 =
2
8
𝑘𝑎4
cos 2𝜃 𝑑𝜃 =
8
𝑟 3 𝑑𝑟 𝑑𝜃
0
2𝜋
cos ²𝜃 𝑑𝜃
0
2𝜋
2𝜋
𝑑𝜃 +
0
cos 2𝜃 𝑑𝜃
0
sin 2𝜃 2𝜋
𝑘𝑎4
2𝜋
𝜃
+
=
2𝜋 + 0
0
0
2
8
𝑘𝑎4
2𝑘𝜋𝑎4 𝑘𝜋𝑎4
2𝜋 + 0 =
=
8
8
4
Assim temos que o momento de inércia em torno do eixo 𝑦 também é 𝐼𝑦 =
𝑘𝜋𝑎 4
4
.
Podemos observar que 𝐼𝑥 = 𝐼𝑦 , isso ocorre devido a simetria por estarmos trabalhando com
uma distribuição de massa uniforme.
Como já calculamos 𝐼𝑥 e 𝐼𝑦 , podemos finalmente calcular 𝐼0 , observe que:
𝐼0 = 𝐼𝑥 + 𝐼𝑦 =
𝑘𝜋𝑎4 𝑘𝜋𝑎4 2𝑘𝜋𝑎4 𝑘𝜋𝑎4
+
=
=
4
4
4
2
Portanto o momento de inércia em torno da origem é 𝐼0 =
𝑘𝜋𝑎 4
2
.
45
CONSIDERAÇÕES FINAIS
Portanto, com a realização desta pesquisa,conseguimos desmistificar a integral dupla
que para muitos apresenta um grande grau de dificuldade e verificar o quanto ela é uma
ferramenta importante para diversas áreas do conhecimento, esta possibilitou o avanço e o
desenvolvimento de várias ciências que careciam de uma ferramenta poderosa para encontrar
soluções para problemas que até então persistiam sem respostas.
46
REFERÊNCIAS BIBLIOGRÁFICAS
ÁVILA, Geraldo Severo de Sousa. Cálculo 3: funções de várias variáveis. 5ªed. Rio de
Janeiro: LTC, 1995.
BOYER, Carl B. História da matemática. 2°ed. Editor Edgard Blucher Ltda. 1996. 4°
Reimpressão 2002.
EVES, Howard. Introdução à história da matemática / Howard Eves; tradução: Hygino H.
Domingues. Campinas-SP: Editora da Unicamp, 2004.
FLEMMING, Diva Marilia; GONÇALVES, Marília Buss, Cálculo B: Funções de várias
variáveis, integrais duplas e triplas. 2ª ed. São Paulo-SP: Pearson prentice Hall, 2007.
FOULIS, David J.; NUNEM, Mustafa A. Cálculo volume 2. Rio de Janeiro: LTC, 1982.
GUIDORIZZI, Hamilton Luis. Um curso de cálculo volume 3. 5ª ed. Rio de Janeiro: LTC,
2002.
HOFFMANN, Laurence D.; BRANDLEY, Geraldo L. Cálculo um curso moderno e suas
aplicações. 7° Ed. Rio de Janeiro: LTC, 2002.
LEITHOLD, Louis. O cálculo com geometria analítica volume 1. 3° Ed. São Paulo-SP:
Harbra , 1994.
LEITHOLD, Louis. O cálculo com geometria analítica volume 2. 3° Ed. São Paulo-SP:
Harbra , 1994.
SIMMONS, George F. Cálculo com geometria analítica volume 2. São Paulo-SP: Person
Education, 1988.
STEWART, James. Cálculo volume 1. 5° Ed. São Paulo-SP: Thomson Learning , 2007.
STEWART, James. Cálculo volume 2. 5° Ed. São Paulo-SP: Thomson Learning , 2007.
Baixar