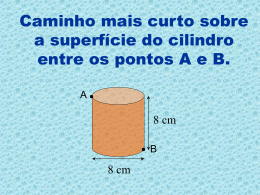
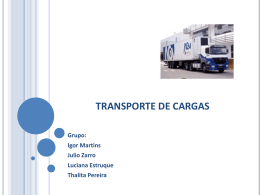
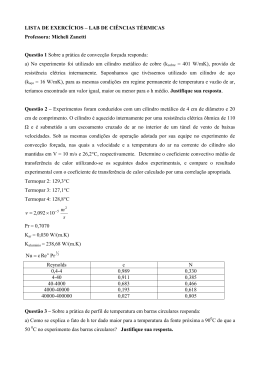
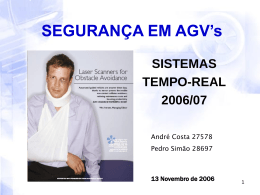
Exercícios Considere o sistema de refrigeração do motor de um automóvel. O radiador possui dois sensores de temperatura S1 e S2, que disparam a 60 e 90 graus centígrados respectivamente. O sistema funciona automaticamente do seguinte modo. Quando a temperatura da água do radiador atinge os 90ºC (S2 = 1), o motor da ventoinha do radiador começa a funcionar, só parando quando a temperatura da água descer abaixo dos 60ºC. Veja o respectivo diagrama de estados deste sistema: Estado 0 1 Ventoinha 0 1 Significado físico Motor abaixo dos 90ºC. Ventoinha desactivada, liga-se quando a temp. chega a 90º. Motor acima dos 90ºC. Ventoinha activa, desliga-se quando a temp. desce dos 60º. Projecte um controlador para este sistema em STL, LAD e GRAFCET A figura seguinte apresenta um sistema automático de furação. Pretendem-se fazer dois furos numa peça. O cilindro A é responsável por fixar a peça e as unidades B e C por efectuarem os respectivos furos. O processo inicia-se com a activação de um botão de início “Start”. As unidades com as brocas (cilindros B e C) têm de descer individualmente e devem subir em simultâneo, de forma a que a peça não seja danificada. Considere o ciclo relativo ao processo anterior. 1. Defina as entradas e saídas do sistema. Caracterize cada uma delas. 2. Utilizando o método dos diagramas de funcionamento determine as equações de comando necessárias para a implementação pneumática do ciclo definido anteriormente. 3. Desenhe o esquema pneumático correspondente. 4. Classifique os cilindros pneumáticos quanto ao seu tipo e indique em que situação se deve utilizar um ou outro. Projecte também um controlador para este sistema em STL, LAD e GRAFCET Uma máquina utilizada para a colocação de pinos em estatores é composta por uma parte de comando electrónica (AP), por um conjunto de cilindros e motores pneumáticos que constituem os seus actuadores e por uma bobina de fio, de secção quadrada, que será cortado, durante o seu ciclo de funcionamento, com o comprimento correspondente à altura do pino desejada. Cada estator tem um nº máximo possível de 10 pinos podendo, no entanto, os pinos serem colocados com uma sequência pré-definida, seleccionando-se para isso, o programa correspondente. O ciclo base para colocação de um pino é definido por: - rotação de 36o do suporte do estator (avanço do cilindro D) - recuperação do sistema de rotação (recuo do cilindro D) - introdução do fio na cavidade (desce cilindro A) - avança lâmina para cortar fio (avança cilindro B) - retorno da lâmina à posição de repouso (recua cilindro B) - é solto o fio no cilindro de fixação (recua cilindro C) - recuperação do comprimento do pino (sobe cilindro A) - prisão do fio, já com o comprimento correspondente ao próximo pino a ser cravado (avança cilindro C). O sistema inicia o seu ciclo de funcionamento quando se pressiona o botão de START. a) Caracterize as entradas e saídas do sistema. b) Caracterize as condições de inicialização e o ciclo de funcionamento para o cravamento de um pino no estator. c) Escreva um programa em STL que executa o cravamento de um pino no estator. (se não fez alínea b), considere o ciclo: D+,A-,B-,C+,B+,A+,C-,DProjecte também um controlador para este sistema em LAD e GRAFCET Cilindro C Posto de furação 1 Cilindro D Posto de furação 2 Tapete 2 Cilindro E Cilindro B START Sensor de posição de peça S1 Tapete 3 Tapete 1 Cilindro A Armazém Cilindro do furo central Cilindro F Posto de furação 2 visto de lado Cilindro H CONTADOR Posto de furação 1 visto de lado Cilindro dos furos laterais Cilindro I Cilindro E Peça Cilindro C Peça Observe com muita atenção a figura seguinte. Ela representa, de uma forma esquemática, um pequeno sistema de fabrico, cujo processo consiste na furação de chapas quadradas. Numa primeira fase (posto de furação 1) abrem-se 4 furos simétricos tal como mostra a figura. Numa segunda fase (posto de furação 2) é realizada a abertura de um furo central de diâmetro superior em relação aos anteriormente efectuados. Seguidamente as peças trabalhadas são encaminhadas para um armazém, onde existe um contador que mantém o controlo dos lotes que saem do circuito produtivo. O cilindro A tem a função de empurrar a matéria prima para o tapete 1 que a encaminha até ao posto de furação 1. Os cilindros B, D, e F têm, respectivamente, a função de empurrar as peças para o tapete 2, 3 e armazém. É função do sistema de controlo o comando dos tapetes logo, será necessário a colocação de sensores que, quando actuados, provoquem o início do funcionamento do respectivo tapete, só parando quando as peças chegam ao seu destino. Os tapetes só comportam uma peça de cada vez, pelo que a actuação dos cilindros A, B, e D vai depender do estado do tapete para onde irão empurrar a peça. O controlo de cada tapete é independente dos restantes, logo estes podem funcionar ao mesmo tempo. Os cilindros C e E servem para fixar a peça de modo a poder realizar-se a furação, pelo que devem ser actuados antes da operação começar. Quando o número de peças realizadas chegar ao valor de 20 unidades faz-se ouvir uma sirene de modo a um operador vir substituir a palete com as peças realizadas que se encontra no armazém. É de notar que quando o operador retira a palete a sirene termina. 1 - Defina e caracterize as entradas e saídas do sistema de comando. Pode colocar os sensores que achar necessários de modo a construir o GRAFCET que implemente todas as características do sistema. Sugestão: Considere igualmente a colocação de variáveis, que indiquem se os tapetes têm ou não peças a viajar, ou a sofrer os processos de fabrico. 2 - Defina as condições iniciais do sistema. 3 - Implemente um GRAFCET funcional que consiga controlar os tapetes, satisfazendo todos os pontos do projecto. Notas: 1 - Não utilize as saídas que utilizou no laboratório. Realize as operações com acções e confirmação de sensores do tipo (TAP1=on, TAP1=off, a1,h1, A+, B-, etc.) 2 - Considera-se que a operação de furação está concluída quando os cilindros H e I chegam ao fim de curso inferior. A partir dai deverão recolher à posição inicial. 4 - Por último é de salientar que o processo só começa quando um sensor detecta a presença de uma peça em bruto junto do cilindro A, como mostra a figura, e quando o botão de START seja activado. A figura seguinte apresenta um sistema automático para abertura e fecho de uma porta com uma chave. Fonte: “Método Sequencial para Automatização Electropneumática”, de José Novais, 2ª edição, Fundação Calouste Gulbenkian O cilindro A encarrega-se de meter e retirar a chave da fechadura e o cilindro B faz rodar a chave nos dois sentidos, para fechar e abrir. Na ponta da haste do cilindro A, existe um rolamento que liga a um tambor, em forma de roda dentada, ao qual está fixa a chave. O avanço e recuo do tambor são guiados pela cremalheira do cilindro B; ao fazer-se B+ ou B- o tambor roda de forma a fechar ou abrir a porta respectivamente. Considere o ciclo relativo ao fecho da porta seguido da sua abertura. 1. Defina as entradas e saídas do sistema e caracterize cada uma delas. 2. Determine as equações de comando do sistema para a implementação pneumática do ciclo definido anteriormente. 3. Desenhe a implementação num esquema pneumático das equações de comando: A+ e A-. Justifique. 4. Considere a válvula seguinte e classifique-a. No processo de fabricação de relés herméticos existe uma operação controlada por autómatos programáveis que se caracteriza pela seguinte sequência de tarefas: - avanço do suporte de relés (avanço Cilindro A) recuperação do transportador (recuo cilindro A) introdução da capa plástica (avanço cilindro B) - recuperação do manipulador da capa (recuo cilindro B) - introdução de cola na junção (avanço cilindro C) - recuperação do doseador de cola (recuo cilindro C) - aplicação de radiação UV, para endurecimento da cola, durante 15s. - aplicação de vácuo no interior do relé e obstrução do orifício provocado, após atingida a pressão de vácuo (avanço cilindro D) - recuperação do dispositivo de vácuo (recuo Cilindro D). O sistema inicia o seu ciclo de funcionamento quando se pressiona o botão de START. a) Caracterize as entradas e saídas do sistema; b) Caracterize as condições de inicialização e o ciclo de funcionamento para a hermetização de um relé. c) Escreva um programa em STL que executa a hermetização de um relé. (se não fez alínea b), considere o ciclo: A-,B-,C+,D-,D+B+,pausa 15s,A+,C-) Estação 1 Botão de chamamento do carrinho da estação 1 Cilindro E S1 Sensor de presença do carrinho na estação P1 Palete Cilindro D S2 S5 Estação de descarregamento Estação 2 P2 S6 S8 Por baixo do carrinho Agulha para mudança de direcção do carrinho Carro de transporte S7 S4 Cilindro C S3 Cilindro B P3 Estação 3 Peça Palete Sensor de presença de peça na palete do carrinho S9 Cilindro A Operação de carregamento/ descarregamento da palete Palete carregada e carro pronto para viagem Figura 1 Observe com atenção a figura seguinte. Ela representa, de uma forma esquemática, uma secção de uma unidade de fabrico, assistida por um AGV (Automated Guided Vehicle) de transporte de peças. O sistema é composto por 3 estações de fabrico e por uma estação de carregamento/descarregamento. No pavimento da fábrica está impresso um percurso quadriculado que pode ser seguido opticamente pelo AGV. Quando o AGV chega a um dos vértices da quadrícula entra numa agulha, actuada por um cilindro, que provoca a mudança de direcção do AGV ( cilindros B, C, D, e E). Os cilindros B, C, D, e E não estão solidários com as agulhagens, ou seja, quando os cilindros recuam as agulhagens mantêm a sua posição. O AGV contém uma palete de transporte de peças que é actuada pelo cilindro A. As peças são processadas nas estações 1, 2 e 3, sendo o AGV chamado por estas, de modo a transporta-las para a estação de descarregamento, onde são descarregadas, saindo assim do sistema. O AGV, no arranque do sistema, encontra-se na estação de descarregamento. Quando recebe um pedido de uma das 3 estações, o AGV inicia o movimento em direcção ao pedido. Quando chega ao destino, carrega a peça, dirigindo-se de novo para a estação de descarregamento onde liberta a peça, ficando novamente à espera de pedidos. O AGV só serve um pedido de cada vez, não transportando assim mais de uma peça na palete. Quando o AGV chega a uma estação a palete é actuada pelo cilindro A, sendo novamente recolhida quando o sensor presente nesta é actuado pela colocação da peça. 1 - Defina e caracterize as entradas e saídas do sistema de comando. (1 valor) 2 - Defina as condições iniciais do sistema. (0.5 valores) 3 - Implemente um GRAFCET funcional que consiga controlar o AGV, e as agulhagens presentes na trajectória, satisfazendo todos os pontos do projecto. (3,5 valores) Notas: 1 - Não utilize as saídas que utilizou no laboratório. Realize as operações com acções e confirmação de sensores do tipo (AGV=on, AGV=off, a1, A+, B-, s1, etc.) 2 - Os sensores S1, S2, S3, S4 verificam se o AGV está posicionado na agulhagem do carril, pronto para a viragem. 3 - Os sensores S5, S6, S7, S8 verificam se o AGV está posicionado nas estações 1, 2, 3, e descarregamento. Proposta de resolução 1 - Considerou-se as seguintes entradas e saídas Entradas a0 - palete recolhida a1 - palete avançada b0 - posicionado para nova passagem b1 - AGV virado c0 - posicionado para nova passagem c1 - AGV virado d0 - posicionado para nova passagem d1 - AGV virado e0 - posicionado para nova passagem e1 - AGV virado P1 - chamamento do AGV à estação 1 Saídas A+ - coloca palete na estação A- - coloca palete no AGV B+ - vira o AGV B- - posiciona cilindro para nova passagem C+ - vira o AGV C- - posiciona cilindro para nova passagem D+ - vira o AGV D- - posiciona cilindro para nova passagem E+ - vira o AGV E- - posiciona cilindro para nova passagem AGV=on - movimento do AGV P2 - chamamento do AGV à estação 2 P3 - chamamento do AGV à estação 3 S1 - AGV posicionado para viragem S2 - AGV posicionado para viragem S3 - AGV posicionado para viragem S4 - AGV posicionado para viragem S5 - AGV na estação 1 S6 - AGV na estação 2 S7 - AGV na estação 3 S8 - AGV na estação de descarregamento S9 - peça presente na palete AGV=off - paragem do AGV 2 - Condições iniciais Todos os cilindros recolhidos, e AGV imobilizado. A-, B-, C-, D-, E-, AGV=off Considere uma fechadura codificada cuja interface com o utilizador se realiza através de um teclado (entradas I1 a I9) como indicado na figura. I1 I2 I3 I4 I5 I6 I7 I8 I9 Além destas teclas existe em local seguro, no interior de um quadro de controlo, uma outra tecla (I0) que quando pressionada abre imediatamente a porta, independentemente do código presente à sua entrada. I0 Considere o seguinte funcionamento “arcaico” da fechadura, baseado apenas nas teclas I1 , I3, I5 e I0. A fechadura abre nas seguintes condições : - se o utilizador pressionar simultaneamente as teclas I1 e I5 - se o utilizador pressionar simultaneamente as teclas I3 e I5 - se o utilizador pressionar simultaneamente as teclas I1 e I3 - se um utilizador credenciado pressionar a tecla Io existente no quadro de controlo. As restantes teclas existem apenas para baralhar eventuais intrusos. 1. Trata-se de um sistema combinatório ou sequencial ? Justifique. 2. Projecte em STL um sistema de comando da fechadura. Considere o seguinte ciclo pneumático : St/B+C-/B-C+/B+C-/B-C+/A-/A+ 1. Projecte o circuito recorrendo a diagramas de funcionamento. 2. Indique os elementos activos e passivos. 3. Desenhe o esquema pneumático correspondente. 4. Recorrendo a um PLC, realize em STL um programa que implemente o ciclo pneumático indicado na pergunta anterior Considere agora um funcionamento mais elaborado da fechadura indicada no problema apresentado anteriormente. O modo de introdução do código passa a ser análogo ao de uma normal máquina multibanco, ou seja, o utilizador coloca um determinado código pressionando uma tecla de cada vez. 1. Projecte em GRAFCET o controlo da fechadura de modo a que ela abra se e só se o código for I1 , I3, I5, I9 . 2. Que modificações faria para que o programa passasse a aceitar também outro código (por exemplo, correspondente a outro utilizador), por exemplo, o código I5 , I4, I6, I8 . Considere o seguinte sistema de enchimento automático de água de um reservatório indicado na figura. No reservatório existem dois sensores S2 e S1 cujo valor lógico é “1” se estiverem em contacto com a água. Considere o seguinte diagrama de estados deste sistema: Bomba Significado Físico Estado 0 Desligada 1 Ligada Reservatório a esvaziar. A bomba liga quando o nível descer abaixo de S1. Reservatório em enchimento. A bomba liga quando o nível atingir S2. B 1 S 2 S 1 1 Projecte um controlador para este sistema em STL, LAD e GRAFCET Considere o seguinte sistema de furação de peças. a) Determine as equações de movimento do cilindro A (cilindro de fixação) e do cilindro B (cilindro de furação). b) Suponha agora que existe um cilindro C que deverá realizar um segundo furo simultaneamente com o primeiro. Indique as novas equações do movimento dos cilindros. c) Indique justificando quais os elementos activos e passivos do circuito anterior (com os três cilindros). d) Desenhe o esquema pneumático correspondente às equações do cilindro B. e) Que tipos de automação conhece ? Para cada tipo indique, justificando, as suas vantagens e inconvenientes em termos dos seguintes critérios : investimentos, volumes de produção, flexibilidade, especificidade do equipamento, variedade de produtos. Projecte um controlador para este sistema em STL, LAD e GRAFCET Realize em GRAFCET o sistema da pergunta anterior, assumindo que se pretendem realizar lotes de 10 unidades com um intervalo de 1 minuto entre o fim de um lote e o início do seguinte. Modifique o programa anterior de modo a introduzir um interruptor denominado “EMERGENCIA” que, quando accionado, tem como consequência a paragem imediata de todas as bombas, voltando o sistema ao seu funcionamento normal quando um interruptor denominado “NORMAL” for pressionado. 2.1 Utilizando o método dos diagramas de funcionamento deduza as equações de movimento do seguinte ciclo pneumático : St / B+C- / B-C+ / B+C- / B+C- / A- / A+ 2.2 Indique justificando quais os elementos activos e passivos. 2.3 Desenhe o esquema pneumático que implemente as equações de movimento do cilindro B. Considere o seguinte sistema de controlo de qualidade S C C As garrafas cheias de refrigerante transportadas pelo tapete passam sob o sensor S que mede a distância do sensor às diversas partes da tampa. De modo a preservar a qualidade do refrigerante as garrafas cheias ficam com uma pressão inferior à pressão atmosférica. Deste modo, a tampa, que tem alguma flexibilidade fica com uma concavidade virada para o interior da garrafa. Se, por falha do processo, a tampa vedar mal, a inexistência de diferenças de pressão faz com que a tampa retorne à sua posição de repouso, ou seja com a concavidade virada para cima. O sensor e o seu sistema de aquisição de sinal estão calibrados de modo a activar os sinais N1, N2 e N3 quando a distância do sensor à tampa é superior aos níveis indicados na figura. Se a concavidade estiver virada para cima, ou se a garrafa tiver perdido a tampa, a garrafa deve ser rejeitada. A acção de rejeitar a garrafa é realizada através da actuação e recuo imediato do cilindro C indicado na figura. Utilizando um PLC realize em STL um programa que controle este processo. N3 N2 N1 Indique um GRAFCET de controlo para este processo Faça as alterações necessárias para incluir o controlo de uma lâmpada amarela intermitente que pisque a um ritmo de 5Hz sempre que a linha se encontre em funcionamento. Considera-se que a linha se encontra em funcionamento se o intervalo entre garrafas for inferior a 1 minuto. Faça as alterações necessárias para incluir uma indicação sonora quando um lote se encontrar terminado. A dimensão de cada lote é de 2000 garrafas.
Baixar