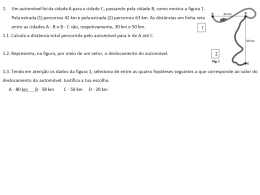
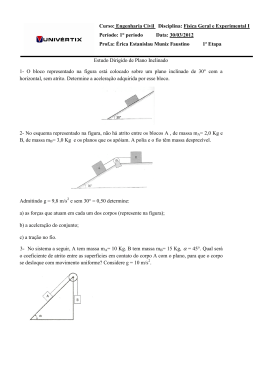
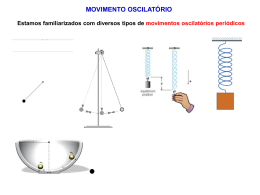
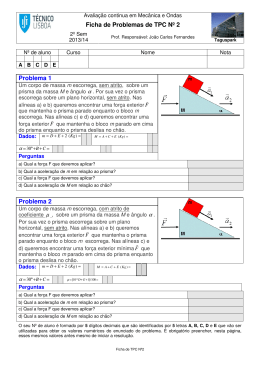
Exemplos relativos à Dinâmica (sem rolamento) A resultante das forças que actuam no corpo é igual ao produto da massa pela aceleração por ele adquirida: Ftotal = ∑ Fk = ma . Cada corpo deve ser tratado k individualmente, escrevendo uma equação vectorial para cada um. Exemplo 1 Neste exemplo o bloco de massa m , colocado sobre um chão horizontal fixo, é puxado por uma força F . Entre o bloco e o chão existe atrito. Usando o usual sistema de coordenadas ( x, y ) podemos escrever o sistema de duas equações que Fa Fa = µ N define o movimento do corpo: horizontal: ma = F − Fa ma = ∑ Fk ⇔ . k vertical: 0 = N − mg N N = mg a F mg Repare-se que na vertical não há movimento, por isso a aceleração é nula, obtendo-se sempre N = mg . A equação na horizontal permita calcular a aceleração do bloco. Existe uma solução estática, a = 0 , desde que F = Fa . Isto só é possível se a força F não a=0 ultrapassar a força de atrito máxima FaMax = µ S N = µ S mg . Para F ≤ µ s mg ⇒ . Fa = F Para valores de F superiores a força de atrito vem dada por Fa = µ k N = µ k mg e a solução F a = − µk g . passa a ser dinâmica: Para F > µ s mg ⇒ m Fa = µ k mg Exemplo 2 Neste exemplo duas massas m e M estão ligadas por um fio inextensível que passa por uma roldana fixa ao tecto. Vamos desprezar a massa e a rotação da roldana. Temos um sistema de 2 corpos e portanto MaM = ∑ Factuam em M duas equações vectoriais: . Como só temos 1 fio a mam = ∑ Factuam em m tensão tem de ser igual, em módulo, nas duas extremidades: TM = Tm = T . Por outro lado, como o fio é inextensível, o módulo da aceleração com que M desce (ou sobe) tem de ser igual ao módulo da aceleração com que m sobe (ou desce): aM = am = a . O sistema de 2 equações vem: a a 14 M −m a= g Corpo M: Ma = Mg − T M +m , resolvendo o sistema obtemos: . Corpo m: ma = T − mg T = 2 Mm g M +m Existe uma solução estática quando as massas são iguais: a = 0 ⇒ M = m . Note-se que a roldana e o tecto formam um sistema estático. A força que actua no eixo da roldana vale: 0 = T * − 2T ⇒ T * = 2T . Esta força é a T* 4mM mesma que actua no tecto: Ttecto = T * = 2T = g . De notar que esta força m+M T T 4mM é menor que a soma dos pesos dos 2 corpos g < ( m + M ) g . A roldana m+M em movimento exerce uma força sobre o tecto menor que estando travada. T* Exemplo 3 Corpo 2 Neste exemplo 3 massas m1 , m2 e m3 estão ligadas por m2 2 fios inextensíveis, passando um deles por uma Corpo 1 roldana fixa a um plano inclinado fixo. Vamos m1 desprezar a massa e a rotação da roldana. m3 Os 2 corpos que estão em cima do plano deslocam-se α Corpo 3 paralelamente a este enquanto o 3º corpo desloca-se na vertical. Isto significa que devemos usar 2 referenciais distintos. Para os corpos 1 e 2 um referencial com o eixo paralelo ao plano e para o corpo 3 um referencial normal. Como temos 2 fios devemos ter 2 tensões distintas T12 entre 1 e 2 e T23 entre 2 e 3. Sendo os 2 fios inextensíveis, o módulo da aceleração com que m3 desce (ou sobe) tem de ser igual ao módulo da aceleração com que m1 e m2 sobem (ou descem): a1 = a2 = a3 = a . Corpo 1. O peso deve ser decomposto nas componentes paralela e normal ao plano: T12 Corpo 1 N1 m1a = T12 − m1 g sin α − Fa1 N1 T12 m g sin α . Equações: a 0 = N1 − m1 g cos α Fa1 Fa1 m g cos α mg 1 α 1 1 Corpo 2. O peso deve ser decomposto nas componentes paralela e normal ao plano: Corpo 2 T23 N2 m2 g sin α T12 N2 T23 T12 F α a2 m2 g Fa 2 m a = T23 −T12 − m2 g sinα − Fa2 Equações: 2 . 0 = N2 − m2 g cosα a m2 g cos α Corpo 3. Equação: m3 a = m3 g − T23 . Corpo 3 T23 a m3 g Juntando as equações para os 3 corpos obtemos os 2 15 m1 a = T12 − m1 g sin α − Fa1 N = m1 g cos α sistemas: m2 a = T23 − T12 − m2 g sin α − Fa 2 e 1 . N = m g cos α 2 2 m3 a = m3 g − T23 Caso 1: Admitamos que não existe atrito entre os corpos 1 e 2 e o plano ( Fa1 = Fa 2 = 0 ). m1 a = T12 − m1 g sin α O sistema simplifica para: m2 a = T23 − T12 − m2 g sin α . Somando as 3 equações obtemos a m3 a = m3 g − T23 m − ( m1 + m2 ) senα aceleração das 3 massas: ( m1 + m2 + m3 ) a = ( m3 − ( m1 + m2 ) senα ) g ⇒ a = 3 g e m1 + m2 + m3 as tensões nos dois fios: T23 = m3 ( g − a ) e T12 = m1 ( a + gsenα ) . Existe uma solução estática: a = 0 ⇒ m3 = ( m1 + m2 ) senα . Fa1 = µ N1 = µm1 g cosα Caso 2: Existe atrito de coeficiente µ entre os corpos 1 e 2 e o plano . Fa2 = µ N2 = µm2 g cosα m1 a = T12 − m1 g sin α − µ m1 g cos α O sistema vem: m2 a = T23 − T12 − m2 g sin α − µ m2 g cos α . Somando as 3 equações obtemos a m3 a = m3 g − T23 aceleração das 3 massas: ( m1 + m2 + m3 ) a = ( m3 − ( m1 + m2 )( senα − µ cosα ) ) g ⇒ m3 − ( m1 + m2 ) ( senα − µ cos α ) a= m1 + m2 + m3 T23 = m3 ( g − a ) . g e as tensões nos 2 fios: T12 = m1 ( a + gsenα + µ g cos α ) Existe uma solução estática: a = 0 ⇒ m3 = ( m1 + m2 ) ( senα − µ cos α ) . Exemplo 4 – Corpo em Referencial acelerado Neste exemplo um elevador de massa M tem no seu interior um corpo de massa m e é puxado para cima por uma força constante F . Observado a partir do referencial Terra ( x, y ) sobe com uma aceleração aE . O corpo m sobe também mas em contacto com o referencial acelerado do elevador e portanto sofre uma força de inércia. Separemos os 2 corpos para resolver o problema. F M y m Elevador no referencial Terra – Tem peso, uma força F e uma força normal N de contacto com o corpo m . F M x aE Mg N Equação: MaE = F − Mg − N . Corpo m no referencial do elevador – Tem peso, uma força de inércia Fi e uma força normal N de contacto com o corpo M igual em módulo mas de sentido contrário. Neste referencial segue colado ao chão portanto a sua aceleração é nula. Equação: 0 = N − mg − maE . N m Fi = maE mg 16 Juntando as 2 equações para os 2 corpos obtemos as 2 incógnitas do problema, a aceleração aE do elevador e a força normal N do corpo sobre o chão (peso real do corpo). F aE = m + M − g . m N= F m+M É claro que o elevador só sobe se a força for superior ao peso dos 2 corpos, F > ( m + M ) g . Neste caso o peso real do corpo m é maior do que o seu peso com o MaE = F − Mg − N . Resolvendo vem: 0 = N − mg − ma E elevador parado N > mg . Existe uma situação estática quando a força é igual ao peso total, F = ( m + M ) g . Na ausência de força, F = 0 , o elevador desce com aceleração g e o peso real do corpo é nulo. Exemplo 5 – Corpo em Referencial acelerado Neste exemplo o bloco de massa M , colocado sobre um chão horizontal fixo, é puxado por uma força F adquirindo uma aceleração aM em relação à Terra. É portanto um referencial acelerado. Em cima deste bloco existe outro, de massa m e que portanto vai sofrer uma força de inércia. Chamemos am à aceleração deste bloco m m M em relação a M . Admitamos à partida a situação mais geral de haver atrito nos dois contactos, entre m e M , e entre M e o chão. Separemos os 2 corpos para resolver o problema. Corpo m . Sobre ele actuam o peso, a força de inércia, a força normal N1 de contacto com M e a força de atrito Fam . O sistema de duas equações que define o movimento do corpo: horizontal: mam = maM − Fam . vertical: 0 = N1 − mg am Fi = maM Corpo M . Sobre ele actuam a força F , o peso, a força normal N1 de contacto com m , a força de atrito Fam com m , a força M F am de atrito FaM com o chão e a força normal N 2 de contacto N1 com o chão. O sistema de duas equações que define o movimento do FaM N 2 Mg horizontal: MaM = F − FaM − Fam corpo M no chão: . vertical: 0 = N 2 − N1 − Mg m N1 mg Fam aM F mam = maM − Fam Ma = F − F − F M aM am Os 2 sistemas ligam-se formando um sistema de 4 equações: . N = mg 1 N 2 = N1 + Mg = ( m + M ) g É este sistema geral que permite resolver todos os casos. 17 Problema 1- Qual a força máxima que se pode fazer para que o bloco M não se mova? (É dado o coeficiente de atrito estático entre M e o chão, µ SM ). Neste caso não existe aceleração de nenhum dos corpos am = aM = 0 . O sistema fica 0 = 0 − Fam 0 = F − F − F F =0 aM am ⇒ am ⇒ FM ax = FamMax = µ SM N 2 = µ SM ( m + M ) g . N = mg F = F 1 aM N 2 = ( m + M ) g A resposta é portanto FM ax = µSM ( m + M ) g . Problema 2 – Admita que não há atrito entre M e o chão. a) Qual a força máxima que se pode fazer sobre M para que o bloco m não escorregue sobre M (não se mova)? (É dado o coeficiente de atrito estático entre m e M, µ Sm ). b) Nestas condições qual a aceleração adquirida por M? Neste caso não existe aceleração do corpo m µ SM = 0 e am = 0 , mas o corpo M deslocase com aceleração aM ≠ 0 . O sistema fica: 0 = maM − Fam m( aM ) Max = ( Fam )max = µSm N1 = µSm mg maM = Fam Ma = F − F M am ⇒ MaM = F − Fam ⇒ ⇒ FMax = ( m+M) µSm g ( m+M) aM = F N1 = mg N = mg N1 = mg 1 N2 = ( m + M ) g A resposta é portanto a) FM ax = µ Sm ( m + M ) g e para a alínea b) aM ax = µSm g . Problema 3 – Admita que não há atrito entre M e o chão. (É dado o coeficiente de atrito estático e cinético entre m e M, µ Sm e µ Km ). Exerce-se uma força F que é o dobro da anterior F = 2µSm ( m + M ) g . a) Qual a aceleração adquirida por M em relação ao chão? b) Qual a aceleração adquirida por m em relação a M? Neste caso não existe atrito com o chão µ SM = 0 , mas existe aceleração dos dois corpos mam = maM − Fam Ma = F − F M am aM ≠ 0 e am ≠ 0 . O sistema fica: . Agora a força de atrito entre os 2 N1 = mg N 2 = ( m + M ) g corpos vem definida a partir da normal, Fam = µ Km N1 = µ Km mg , o que permite simplificar o am = aM − µ Km g mam = maM − µ Km mg sistema: ⇒ F − µ Km mg . Usando o valor de F do enunciado MaM = F − µ Km mg aM = M m+M am = m ( 2µ Sm − µ Km ) g obtemos a solução para as duas alíneas do problema: . a = 2µ Sm ( m + M ) − µ Km m g M M 18 Exemplo 6 – Corpo em Referencial acelerado inclinado. Neste exemplo um bloco de massa m escorrega sobre um prisma de massa M , que por sua vez escorrega sobre m uma superfície horizontal fixa (chão). a1 O prisma ao deslocar-se para a esquerda adquire uma a2 aceleração a2 em relação à Terra. É portanto um referencial M α acelerado. Em cima do prisma está o corpo de massa m , que portanto vai sofrer uma força de inércia para a direita Fi = ma2 . Por acção do seu peso este corpo vai descer o plano inclinado com aceleração. Chamemos a1 à aceleração deste bloco m em relação a M . Admitamos à partida a situação mais geral de haver atrito nos dois contactos, entre m e M , e entre M e o chão. Separemos os 2 corpos para resolver o problema. Corpo m . Sobre ele actuam o peso, a força de inércia, a força normal N1 de contacto com M e a força de atrito Fa1 . Como o movimento se N 1 Fi = ma 2 dá paralelo ao plano inclinado é vantajoso usar N1 ma cos α m mgsenα m um referencial colado a M mas com o eixo ⇔ a1 a1 F a1 paralelo ao plano. Para isso temos de converter Fa 1 mg cos α mg as forças que não são nem paralelas nem ma senα perpendiculares ao plano, nas suas duas componentes, neste caso o peso e a força de inércia. É isso que foi feito nas figuras ao lado. À esquerda está o corpo com as forças tal como se apresentam em relação ao chão horizontal e à direita como se apresentam num chão com inclinação α . São equivalentes. O sistema de duas equações que define o movimento do corpo ao longo do plano é: 2 2 horizontal: ma1 = ma2 cos α + mgsenα − Fa1 . vertical: 0 = N1 + ma2 senα − mg cos α Corpo M . Sobre ele actuam o peso, a força normal N1 de contacto com m , a força de atrito Fa1 com m , a força de atrito Fa 2 com o chão e a força normal N 2 de contacto com o chão. O sistema de duas equações que define o movimento do corpo M no chão: Fa 1 c os α Fa 1 sen α F a1 N2 N 1 se n α a2 M N1 N 1 co s α α Fa 2 Mg horizontal: Ma2 = N1 senα − Fa 2 − Fa1 cos α . vertical: 0 = N 2 − N1 cos α − Mg − Fa1 senα Os 2 sistemas ligam-se formando um sistema de 4 equações: ma1 = ma2 cos α + mgsenα − Fa1 Ma = N senα − F − F cos α 2 1 a2 a1 . É este sistema geral que permite resolver todos os casos. N1 = −ma2 senα + mg cos α N 2 = N1 cos α + Mg + Fa1 senα 19 Problema 1 – Admita que não há atrito entre M e o chão, nem entre m e M. a) Qual a aceleração adquirida por M em relação ao chão? c) Qual a aceleração adquirida por m em relação a M? Neste caso não existe qualquer atrito Fa1 = 0 e Fa 2 = 0 , mas ambos os corpos têm ma1 = ma2 cos α + mgsenα Ma2 = N1 senα . A quarta equação aceleração a1 ≠ 0 e a2 ≠ 0 . O sistema fica: N ma sen α mg cos α = − + 1 2 N 2 = N1 cos α + Mg não interessa para a resolução deste problema, porque não havendo atrito com o chão a força normal N 2 não condicional qualquer das outras variáveis. Podemos eliminar N1 usando a segunda e terceiras equações e ficamos apenas com um sistema de 2 equações a 2 ma1 = ma2 cos α + mgsenα incógnitas. . Resolvendo temos a solução para as duas 2 Ma2 = −ma2 sen α + mg cos α senα ( m + M ) senα g a1 = M + msen 2α . perguntas: a = m cos α senα g 2 M + msen 2α Problema 2 – Admita que não há atrito entre M e o chão, mas existe entre m e M de coeficiente µk 1 . a) Qual a aceleração adquirida por M em relação ao chão? d) Qual a aceleração adquirida por m em relação a M? Neste caso só existe atrito entre os dois corpos Fa1 ≠ 0 e Fa 2 = 0 , mas ambos os corpos ma1 = ma2 cos α + mgsenα − Fa1 Ma = N senα − F cos α 2 1 a1 têm aceleração a1 ≠ 0 e a2 ≠ 0 . O sistema fica: . A força de N = − ma sen α + mg cos α 1 2 N 2 = N1 cos α + Mg + Fa1 senα atrito é neste caso Fa1 = µk 1 N1 . A 4ª equação não tem interesse para o problema, ficamos ma1 = ma2 cos α + mgsenα − µ k1 N1 com um sistema de 3 equações a 3 incógnitas: Ma2 = N1 ( senα − µk 1 cos α ) . N1 = −ma2 senα + mg cos α Substituindo a 3ª equação na 2ª obtém-se a aceleração do prisma: cos α a = g . Podemos usar este resultado para calcular a força normal: 2 senα + N1 = M m ( senα − µk 1 cos α ) M cos α M senα ( senα − µ k1 cos α ) + m g . Substituindo estes dois resultados na 1ª equação obtemos a aceleração do corpo m em relação ao plano: a = m + M 1 m 1 M senα + m ( senα − µ k1 cos α ) g 20
Baixar