XXVII Congresso de Iniciação Científica da UNESP
III Fórum Internacional de Iniciação Científica da UNESP
Projeto de um robô para resgate de alto risco utilizando Busca
A estrela e autômatos celulares implementado em Arduino.
Gabriel Augusto Bromerchenkel Cunha, Silas dos Santos Vergílio, Paloma Maria Silva Rocha Rizo
Departamento de Engenharia Elétrica / Faculdade de Engenharia de Guaratinguetá / UNESP
Introdução
Resultados e Discussão
Autômatos Celulares (AC) são uma maneira de caracterizar sistemas
físicos. É possível especificá-los de maneira textual como um AC
genérico representado por: AC = AC{G, V , S , I , R , C ,A}; onde G é a
geometria do sistema, V a estrutura de vizinhança, S o conjunto de
estados, I a condição inicial, R o conjunto de regras, B as condições de
contorno e A o critério de atualização³.
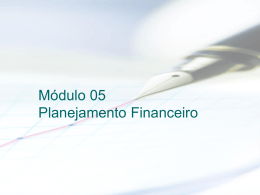
O algoritmo de inteligência artifical A-estrela se baseia em avaliar
possíveis caminhos próximos de uma localidade baseado em uma
função chamada de função avaliação, a mesma é baseada em fatores
escolhidos pelo desenvolvedor e pela distância daquele percurso até o
objetivo a ser alcançado¹.
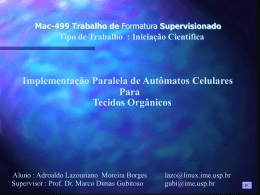
Adotou-se o mapa apresentado na figura 1 que simula o ambiente
industrial e sugere alguns possíveis caminhos,pela análise prévia do
mesmo. O simulador completou com sucesso o melhor caminho até o
objetivo evitando zonas de incêndio e vazamento de gás.
Figura 2 Mapa desenvolvido
O projeto teve duas fases de implementação, uma utlizando uma
interface de simulação desenvolvida em linguagem C, outra usando a
breakboard de Arduino da plataforma Galileu da Intel com uma
estrutura projetada para ser impressa em uma impressora 3D e
motores de passo.
Figura 1 Exemplo de algorítimo de busca A*
Objetivos
O objetivo deste trabalho é desenvolver um protótipo de um
dispositivo autônomo capaz de agir no resgate de alto risco dentro de
um acidente industrial envolvendo um vazamento de gás e altas
temperaturas utilizando Autômatos Celulares e Busca A estrela.
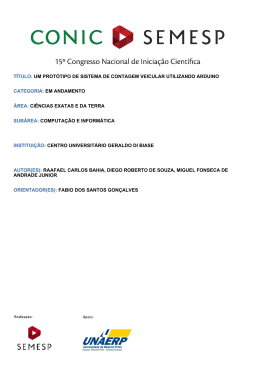
Figura 3 Interface de simulação
A plataforma Galileu foi usada devido tanto a sua alta capacidade de
processamento, capacidade de uso e programação quanto a seu potencial
de melhorias de projeto como mostra a figura 3
Material e Método
Duas plataformas foram escolhidas para o desenvolvimento do projeto:
Linguagem C e Arduino. A primeira foi usada para criar um ambiente
de simulação e primeiros testes lógicos. A programação foi feita na IDE
Dev C++. O protótipo físico foi implementado na plataforma Arduino,
pois sua linguagem ser muito parecida com a linguagem C e sua
facilidade de implementação eletrônica. A locomoção escolhida foi a de
motores de passo, devido a sua precisão, o que permite que o
movimento estipulado pelo código em simulação seja equivalente ao
movimento real do robô. A equação 1 apresenta a função avaliação
usada no trabalho.
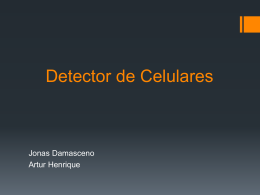
Figura 4 Plataforma Galileu para aplicação prática do projeto
Conclusões
O destaque do projeto está em sua simplicidade em mapear uma zona
muito complexa com um grande número de informações e lidar com
ela baseada em dois métodos matemáticos muito bem conceituados.
𝒇 = (𝒕𝒆𝒎𝒑𝒙𝒈á𝒔𝒙𝒅𝒊𝒔𝒕â𝒏𝒄𝒊𝒂) ⁄ 𝒖𝒎𝒊𝒅𝒂𝒅𝒆
Equação.1
Bibliografia
Vergilio, S. S.; Bacelar, L S..Especificação e Simulação de autômatos celulares Markovianos
– Aplicações à modelagem de epidemias.2011.
² Rich, E.; Knight, K: Inteligência Artificial. Makron Books. 2ª. Edição. São Paulo, 1994.
1
Baixar