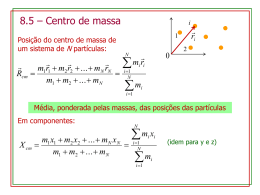
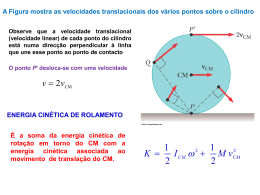
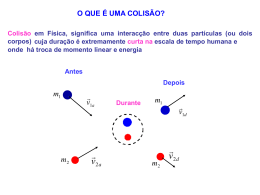
Módulo 4 – Sistema de Partículas e Momento Linear Momento linear Momento linear (quantidade de movimento) de uma partícula: p mv • Grandeza vetorial • Unidades S.I. : kg.m/s Momento linear e 2ª Lei de Newton: dv F m F ma dt Se a massa é constante: d mv F dt dp F dt Formulação original de Newton da sua 2ª Lei Conservação do momento linear Considere um sistema isolado: Ausência de forças externas Exemplo: Par de astronautas, onde há apenas forças internas FB sobre A Par ação-reação: FA sobre B FB sobre A FA sobre B d p B F A sobre B dt Pela 2ª Lei: dp A F B sobre A dt dpB dp A d p A pB 0 Assim: FA sobre B FB sobre A dt dt dt Definindo o momento linear total: P pA pB Na ausência de forças externas (sistema isolado), dP Temos: 0 ou se a resultante das forças externas for dt nula, o momento linear total se conserva Lei de Conservação do Momento Linear: • Pode ser facilmente generalizada para um número qualquer de partículas •É consequência da 3ª Lei de Newton Colisões Antes m1 m2 Depois v1 v2 Durante m1 m2 v1 v2 Interação entre pares de partículas com duração extremamente curta. Muitas vezes não conhecemos os detalhes da interação, temos acesso apenas às velocidades logo antes e logo depois da colisão. Aplicações Física de partículas elementares Rutherford (descoberta do núcleo) Na maioria das colisões, podemos supor um sistema isolado: Forças internas têm tipicamente duração muito mais curta e intensidade muito maior que as forças externas – podemos usar a conservação do momento linear No entanto, a energia cinética não se conserva necessariamente: • Colisão elástica: energia se conserva • Colisão inelástica: energia não se conserva • Colisão totalmente inelástica: perda de energia cinética é máxima (partículas ficam grudadas depois da colisão) Colisões elásticas ANTES A Caso geral em 1D Conservação do momento linear: vB DEPOIS mAvA mB vB mAvA mB vB Conservação da energia: vA B vA A B vB 1 1 1 1 m Av A2 mB vB2 m AvA2 mB vB2 2 2 2 2 Conhecendo-se as massas e as velocidades iniciais, podemos obter as velocidades finais (2 equações e 2 incógnitas) Caso particular em 1D: uma das massas inicialmente parada ANTES A Conservação do momento linear: vA vB 0 DEPOIS mAvA mAvA mB vB Conservação da energia: B vA 1 1 1 m Av A2 m AvA2 mB vB2 2 2 2 m A mB vA m m v A A B Depois de alguma álgebra: v 2m A v B m A mB A A B vB vA 0 Caso ainda mais particular: mA mB vB v A Procedimento experimental Seguindo o guia de laboratório, faremos 2 experimentos: colisão elástica e colisão totalmente inelástica I – Colisão Elástica a. Selecionar 2 carrinhos com massas idênticas b. Verificar a instalação do centelhador para que ele registre o movimento de ambos carrinhos c. Montar uma tabela x(t) para os dois carrinhos d. Obter, a partir do programa de ajuste linear, as respectivas velocidades e. Verificar a conservação do momento linear e da energia cinética f. Fazer gráfico x(t) para os dois carrinhos na mesma folha de papel Incertezas Momento linear de uma partícula: p mv m p p 2 v 2 m v Se pudermos desprezar a incerteza da massa: Momento linear total de 2 partículas: P p A pB P p A 2 pB 2 pv p v Energia cinética de uma partícula (como vimos no Módulo 3): 1 2 K mv 2 m K K 2 v 2 4 m v Se pudermos desprezar a incerteza da massa: Energia cinética total de duas partículas: K K A KB K K A 2 K B 2 (fim da primeira aula) K 2 Kv v Centro de massa Posição do centro de massa de um sistema de N partículas: i 2 m r ii 0 N m r m2 r2 ... mN rN Rcm 1 1 m1 m2 ... mN ri 1 i 1 N m i i 1 Média, ponderada pelas massas, das posições das partículas Em componentes: X cm m1 x1 m2 x2 ... mN x N m1 m2 ... mN N m x i 1 N i i m i 1 i (idem para y e z) Movimento do centro de massa m1r1 m2 r2 ... mN rN Rcm m1 m2 ... mN Velocidade do centro de massa: dRcm m1v1 m2v2 ... mN vN Vcm dt m1 m2 ... mN Massa total: M m1 m2 ... mN MVcm m1v1 m2v2 ... mN vN P (momento linear total) Momento linear total é igual à massa total multiplicada pela velocidade do centro de massa Como vimos, se a resultante das forças externas for nula, ou se o sistema for isolado: P constante Vcm constante Colisões no referencial do centro de massa: • ausência de forças externas, velocidade do c.m. permanece inalterada pela colisão • referencial do c.m. é inercial vA A vA A Trajetória do c.m. vB B A u A uA A B C.m. está parado u B uB B Referencial do c.m. vB B Referencial do laboratório Velocidades no referencial do centro de massa: u A v A Vcm u B vB Vcm u A v A Vcm u B vB Vcm Conservação do momento linear: mA uA Vcm mAvA mB vB mAvA mB vB mB uB Vcm mA uA Vcm mB uB Vcm mAu A mBuB mAu A mBuB Momento linear também se conserva no referencial do centro de massa (como esperado, pois trata-se de um referencial inercial) Energia cinética no referencial do lab: Antes: Ec 1 1 m Av A2 mB vB2 2 2 Mudança de variáveis para velocidade do c.m. e velocidade relativa: mAv A mB vB Vcm mA mB v v v u u (independedo referencial) A B A B rel Invertendo, obtemos: mB v A Vcm m m A B v V m A cm B m A mB vrel vrel Substituindo na expressão para a energia cinética: 1 1 2 Ec m Av A mB vB2 2 2 2 1 mB 1 mA Ec m A Vcm vrel mB Vcm vrel 2 m A mB m A mB 2 Após alguma álgebra: Definindo: 1 1 mAmB 2 2 Ec mA mB Vcm vrel 2 2 mA mB M mA mB mA mB mA mB (massa total) e (massa reduzida) 2 Obtemos finalmente: Ec 1 1 2 MV cm2 vrel 2 2 Energia cinética do movimento do centro de massa Energia cinética do movimento relativo Análise: 1. Parece com a expressão da energia cinética de duas “partículas” 2. No referencial do c.m., temos: E cm c 1 2 vrel 2 ( vel. do c.m. 0) Ou seja, a energia cinética depende do referencial, e a energia cinética mínima é aquela calculada no referencial do c.m. 3. Antes e depois de uma colisão, a velocidade do c.m. não varia, de modo que a variação da energia cinética é: 1 1 2 2 Ec vrel vrel 2 2 Ou seja, a variação de energia cinética não depende do referencial (como esperado) 4. Em uma colisão elástica, temos: 1 1 2 2 vrel 0 vrel vrel Ec vrel 2 2 Ou seja, o módulo da velocidade relativa não é alterado pela colisão 5. A perda máxima de energia cinética (colisão totalmente inelástica), ocorre quando: 0 1 1 2 1 2 2 vrel vrel Ec vrel 2 2 2 Desta forma, explica-se porque as partículas ficam “grudadas” depois de uma colisão totalmente inelástica Procedimento experimental II – Colisão Totalmente Inelástica a. Selecionar 2 carrinhos com massas diferentes: o carrinho inicialmente em repouso deve ter massa 100g maior que a do carrinho incidente b. Verificar a instalação do centelhador para que ele registre o movimento de ambos carrinhos c. Montar a seguinte tabela: t(s) x1 (cm) δx1 (cm) x2 (cm) δx2 (cm) XCM (cm) δXCM (cm) x'1 (cm) δx'1 (cm) x‘2 (cm) δx‘2 (cm) 0,0 ... ... ... ... ... ... ... ... ... ... 0,1 ... ... ... ... ... ... ... ... ... ... 0,2 ... ... ... ... ... ... ... ... ... ... d. Seguindo o guia, calculamos a energia e o momento linear antes e depois da colisão, em ambos referenciais e. Fazer gráficos de x1, x2 e XCM em uma folha f. Fazer gráficos de x’1 e x’2 (posições no ref. Do CM) em outra folha Incertezas Posição do centro de massa: X cm 1 m1 m2 X cm m1 x1 m2 x2 m1 m2 m12 x1 m22 x2 2 2 m12 m22 0,1 cm m1 m2 (desprezando as incertezas nas massas) Posições no referencial do CM: xi xi 2 X cm 2 xi xi X cm
Baixar